基于能量管理的飞翼飞行器迫降轨迹设计
2023-10-10黄天鹏王霄婷吴云燕王跃萍
黄天鹏, 王霄婷, 吴云燕, 王跃萍, 刘 玮, 刘 武
(航空工业西安飞行自动控制研究所,陕西 西安 710000)
飞翼飞行器由于其翼身融合、无常规垂尾等结构特点,与传统固定翼飞行器相比具有高升阻比、低可探测性、高机动性等优势,因此在高空长航时侦察打击等领域广泛应用[1]。飞行器发生发动机停车的应急情况时的应急着陆能力是飞行器可广泛应用的重要条件之一[2]。当飞行器发生空中发动机故障停车时失去动力导致无法继续飞行任务时,由于飞翼飞行器飞行包线大、发动机停车时飞行状态的随机性强,如何将其安全可控、精确地导引至预定机场或迫降点,避免造成人员伤亡和财产损失是一大难题[3]。
飞行器无动力返场技术早期发展于国外航天飞机再入末段区域的制导控制问题[4],这类方法主要针对航天飞机再入时遇到的能量耗散问题和固定着陆场的返场轨迹设计进行了研究。Eng等[5]针对固定翼无人机的无动力返场问题,提出扩展的三维Dubins轨迹规划方法进行轨迹规划,并提出利用有人机驾驶员经验和迫降点影响因素进行模糊逻辑推理选择迫降点。但是该方法由于在发动机停车点附近做盘旋下降消耗高能后退出盘旋圆朝机场进近点且规划的盘旋圆航迹假设速度和半径不变,使得该方法容易在飞行末段能量偏差和落点散布较大。
目前国内在有人机迫降轨迹设计时主要针对特定迫降点和预先设计的特定航线,在实际应用时缺乏对不同机场的通用性和不确定飞行环境因素的适应性[6]。Li等[7]针对空天往返高超声速无人机的再入段高能问题采用侧向S弯机动消耗多余能量,该方法一般适用于初始能量变化范围较小、飞行器升阻比较低的空滑返场轨迹设计。黄得刚等[8]针对无人机无动力进场问题中采用典型三维Dubins路径设计无人机无动力进场航迹,该文献主要针对三维Dubins轨迹跟踪问题分别设计了圆弧段、直线段的非线性制导律以及采用切换平面的方法实现圆弧与直线航段的交接,并通过稳定性分析和仿真验证了该方法航迹跟踪的精确性和鲁棒性,但该文献中以无人机发生发动机停车时高度充足为前提,并当无人机退出末端Dubins圆弧时仿真结束,未考虑无人机发生发动机停车时的能量与所规划的返航路径所需能量的匹配性。王子安等[9]针对复合翼无人机的应急迫降航线规划问题,将航天飞机末端能量调整的S弯机动思想与三维Dubins航迹相结合,在末端盘圆段增加与盘圆方向相反的调整圆弧增加航迹长度,解决在高能情况下若干整圈盘旋圆能量耗散与无人机能量不匹配的问题,并采用非线性模型预测方法实现制导律设计。张媛媛[10]针对无人机空滑初始能量较高具备返场能力的情况,将空滑返航阶段分为航向调整、返航飞行、能量管理和着陆4个阶段,并进行了返场能力分析和轨迹设计。上述研究主要针对能量充足的无动力返场问题,该问题主要目的是引导飞行器朝机场飞行并通过拉平、着陆滑跑等阶段使得飞行器正常着陆到跑道上,但是对返场能力不足的迫降情况未展开研究分析。
本文主要针对空滑过程中因飞行器初始停车能量不足或空滑返场过程中因外界环境干扰导致飞行器能量不足无法安全返回机场的情况,解决引导飞行器安全可控地飞行至迫降点附近完成可控性坠毁的问题。首先,对飞行器无动力飞行过程进行力学运动分析,在此基础上采用满足始末端约束的Dubins轨迹搜索方法[11]规划低能迫降轨迹与高能迫降轨迹,并在提出迫降过程能量定义和高、低能状态的基础上,在迫降飞行中通过在线轨迹规划对飞行器能量进行实时管理,实现飞行器按自身能量安全可控地返回迫降点,需要说明的是该类迫降飞行问题关注飞行过程安全可控且飞行器落点位置满足可迫降范围的要求,不需考虑正常着陆相关的接地航向等状态。
1 无动力滑翔运动分析
飞行器迫降飞行一般包括无动力直线下滑和无动力稳态盘旋下降两种飞行状态[12],可以通过建立运动模型对迫降过程进行分析,为后续设计的轨迹提供可达性判断和能量调整策略。
当飞行器发生发动机失效停车时,以稳态盘旋降高状态为例,建立力学运动方程为
(1)
式中:G为重力;γ为航迹倾角;L为升力;φ为滚转角;m为质量;V为飞行器速度;R为盘旋半径;D0为飞行器本体气动阻力;DT为发动机停车引起的附加阻力。式(1)中设滚转角为0时可适用直线下滑状态的力学分析,则飞行器升阻比为
(2)
式中:ddtg为飞行器的可飞前向距离;H为初始高度。
由式(2)可知,在φ不变的情况下飞行器升阻比随γ的增大而减小,在飞行过程中表现为下滑轨迹越陡,升阻比越小;在H相同时,升阻比越大,ddtg越大。飞行器无动力滑行过程是总能量不断被本体气动阻力和发动机阻力消耗的过程[13],因此可以通过调整轨迹角来调整飞行器升阻比,进而控制能量消耗的速度,达到能量控制的目的。
2 Dubins轨迹设计
飞行器迫降时本身已处于不安全状态,因此轨迹规划时,考虑航迹能量可达的同时应尽量使航迹平滑连续以减少不必要的能量消耗。Dubins轨迹设计方法可在飞行器初始/终端位置、速度、航向约束的情况下搜索得到由定半径圆弧和直线组成的平面最短航迹,航迹形式一般包括CCC、CSC等,其中,C为定半径的圆弧航迹,S为与圆弧相切的直线航迹,出于空滑迫降飞行过程中航迹间接性和可解性的考虑,空滑迫降航迹一般采用圆弧和直线组成的CSC类航迹,其中按照圆弧盘旋方向为左盘旋、右盘旋的不同,具体可分为RSR、RSL、LSR、LSL这4类,L为左盘旋,R为右盘旋。该航迹圆弧半径可由式(1)推理得到:
(3)
由式(3)可知,Dubins轨迹设计方法在圆弧段轨迹设计时满足当前飞行器飞行速度、航迹倾角、滚转角下的最小转弯半径约束,并且以圆弧和直线相切的形式衔接圆弧和直线航段,实现飞行器状态的平稳过渡,保证了在迫降轨迹设计时符合飞行器的动力学约束,因此适用于迫降过程的轨迹设计。
根据飞行器初始的能量状态,在迫降飞行中可采用Dubins轨迹设计低能和高能两类迫降轨迹。其中,低能迫降轨迹如图1所示,以飞机停车点经盘旋航向调整后按直线飞向迫降点,形成由掉头圆弧和直线组成的广义Dubins的CS类航迹。高能迫降轨迹如图2所示,分别是以停车点为起点的掉头圆、以迫降点为圆心的盘旋降高圆、两圆切线组成的典型CSC航迹与低能迫降轨迹组成的CSC-CS类航迹。

图1 低能迫降轨迹

图2 高能迫降轨迹
2.1 低能迫降轨迹
飞行器按最小转弯半径R1掉头盘旋后按直线飞向迫降点,达到以最小能量损失、最短航迹飞向迫降点的目的。
如图1所示,以迫降点S1为原点,北向为x轴,东向为y轴,建立坐标系,设以飞机停车点位置S0(x0,y0)和航向Ψ构成的右掉头圆圆心为CR(xR,yR)、左掉头圆圆心为CL(xL,yL),掉头圆与迫降点S1的切点分别为TR(TxR,TyR)、TL(TxL,TyL),取掉头圆圆心距迫降点距离较小的一侧为掉头方向(图1所示为左掉头一侧),对应掉头圆圆心为C(Cx,Cy),切点为T(Tx,Ty),则低能迫降航线的掉头圆航段长度d1为
(4)
低能迫降航线的直线航段长度d2为
(5)
式中:ttag为掉头圆盘旋方向,右掉头盘旋时ttag取1,左掉头盘旋时ttag取-1。
则低能迫降航线总长度DDIS=d1+d2。
2.2 高能迫降轨迹
笔者针对飞行器低能无法返回着陆机场但是按2.1节的低能迫降轨迹飞向迫降点时能量又偏大,导致迫降接地点可能超出允许的迫降安全范围或飞行器处于高动压不安全状态的问题进行迫降轨迹设计。飞行器按最小转弯半径R1掉头盘旋后按切线飞向盘旋降高圆,在盘旋降高飞行过程中按2.1节规划低能迫降航线,当低能迫降航线能量与飞机能量相匹配时转入低能迫降航段飞行,实现在初始高能时能量可控地到达迫降点。
以迫降点S1为原点,北向为x轴,东向为y轴,建立坐标系,停车点位置S0(x0,y0)和航向Ψ,选取左、右掉头方向形成的掉头圆中圆心距迫降点近的一侧为掉头盘旋方向ttag,对应掉头圆圆心为C(Cx,Cy),掉头圆切点T1(Tx1,Ty1),盘旋降高圆切点T2(Tx2,Ty2),取盘旋降高圆的盘旋方向与掉头盘旋方向相反为-ttag,则高能迫降航线掉头圆航段长度d1为
(6)
高能迫降航线切线航段长度d2为
(7)
3 飞行器能量管理
3.1 迫降能量定义
飞行器迫降飞行过程是飞行器动能、势能转换以及阻力引起的能量耗散的过程。飞行器总能量为
(8)
将式(8)归一化可得:
(9)
设迫降轨迹中飞行器航迹倾角为γc,规划轨迹长度为ddtg,则轨迹标称高度为
hc=tanγc·ddtg
(10)
一般取标称速度Vc为飞行器最大升阻比速度,则规划航迹所需能量为
(11)
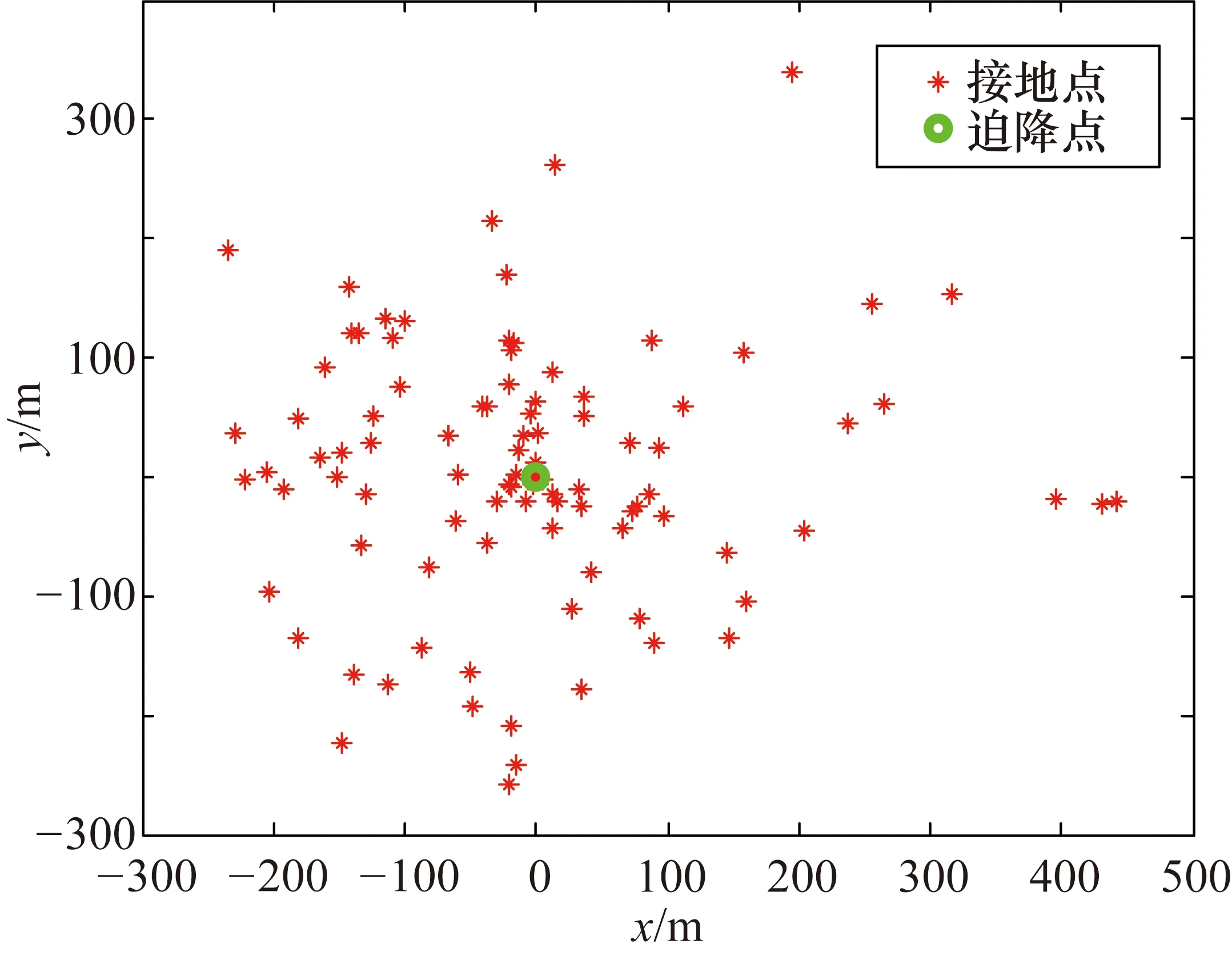
则可根据飞行器当前能量E和航迹所需能量Ec将迫降过程能量状态分为低能和高能两种状态:当E≥Ec时能量状态为迫降高能;当E 飞行器进入迫降飞行时,需要通过初始能量评估在备选迫降点中选择与能量相匹配的迫降点;确定迫降点后,建立以迫降点为原点的相对导引坐标实现进行航段导引;为了降低迫降过程对环境不确定因素的影响,提高迫降轨迹设计的鲁棒性,需要对当前轨迹进行实时能量评估,根据评估结果实时调整迫降轨迹,实现安全可控的迫降回收过程。在迫降能量管理设计中,将迫降飞行阶段划分为迫降点趋近段、盘旋降高段和中心迫降段。迫降飞行运行逻辑如图3所示。 图3 迫降飞行阶段运行逻辑 在发动机失效时首先针对飞行器初始状态进行初始能量评估,选择与初始能量相匹配的迫降点。若飞行器能量不足,处于迫降低能状态,则转入中心迫降阶段,按照图1所示的迫降轨迹进行初始航向调整后直接飞向迫降点;若初始飞行器能量为迫降高能,则按照图2所示的高能迫降轨迹,经过掉头圆调整后按直线朝以迫降点为圆心的盘旋圆飞行,当到达盘旋圆后绕迫降点盘旋降高实现能量消耗。在盘旋下降过程中将飞机当前能量和飞机位置到迫降点构成的轨迹(图2中AB段)所需能量进行对比评估,当飞机能量变为迫降低能状态时转入中心迫降段,按照低能迫降轨迹飞向迫降点。 以某飞翼飞行器为研究对象进行迫降轨迹设计,并进行100次批量仿真验证。设置机场高度和迫降点高度为1 500 m,初始水平位置距迫降点7 500 m,仿真时设飞行器以不同高度、表速进入迫降飞行过程,并加入常值风,迫降批量仿真参数设置如表1所示。 表1 迫降批量仿真参数设置 批量仿真结果中所有仿真算例的迫降地轨迹图如图4所示。迫降接地点散布如图5所示。 图4 迫降地轨迹图 图5 迫降接地点散布图 由批量仿真结果可知,在不同初始高度、速度飞行状态和常值风干扰的条件下,由于初始能量评估为低能,按低能迫降轨迹飞向迫降点的算例占11%,其余89%的算例均为初始高能,按设计的高能迫降轨迹飞行至迫降点。所有算例的迫降接地点均在距迫降点500 m范围内,均值为140.8 m。 作为仿真对比,在相同仿真条件下采用文献[7]中的S弯机动能量管理方法进行迫降过程的仿真测试,仿真结果的迫降接地点散布如图6所示。 从对照仿真结果来看,采用S弯机动的能量管理方法由于在迫降初始段进行S弯机动调节能量,其后朝着迫降点飞行直至接地,因此迫降接地点仅分布在迫降点附近的特定区域,接地点在距迫降点638 m范围内,均值为228.4 m。综合仿真结果说明笔者提出的基于能量管理的迫降轨迹设计方法优于S弯机动能量管理方法,同时可以兼顾飞行器迫降对于接地精度和环境干扰鲁棒性的要求。 选取打靶仿真中典型初始高能的算例进行分析,该算例初始高度为2 674.1 m、初始表速为68.9 m/s、北向风速为6 m/s、东向风速为6.7 m/s,迫降初始为高能状态,通过Dubins方法搜索得到初始位置掉头、趋近盘旋降高圆直线段、盘旋降高圆组成的高能迫降轨迹;在迫降飞行过程中飞行器经左掉头航向调整后沿直线飞向以迫降点为圆心的盘旋降高圆,并在盘旋降高段进行能量实时评估,当能量满足迫降低能条件后转入中心迫降段按照低能迫降轨迹飞行直至迫降接地,迫降过程轨迹变化平滑,飞行器各飞行状态可控,接地点距所选迫降点47.1 m。该算例三维轨迹如图7所示。初始高能算例迫降飞行器状态曲线如图8所示。 图7 初始高能算例迫降轨迹图 图8 初始高能算例迫降飞行器状态曲线 针对飞翼类飞行器在能量较低不足以安全返回着陆机场情况下的迫降轨迹设计问题,首先,对无动力滑翔飞行过程进行力学运动分析;随后,基于迫降过程中飞行器始末端状态约束和飞行器能力考虑,采用Dubins轨迹搜索算法进行迫降轨迹设计,提出根据飞行器不同初始能量状态设计由掉头圆弧和直线组成的广义Dubins类低能迫降轨迹和由掉头圆、盘旋降高圆、两圆公切线以及低能迫降轨迹组成的高能迫降轨迹;提出在迫降轨迹飞行中通过实时能量评估和阶段管理,实时规划与当前飞行器能量匹配的低能迫降轨迹和高能迫降轨迹,完成迫降过程的能量管理;最终通过批量仿真和对比验证了迫降轨迹规划方法的有效性。仿真结果表明,提出的基于能量管理的迫降轨迹规划方法兼顾迫降对于落点精度和环境干扰鲁棒性的要求,具备良好的工程应用性。3.2 迫降能量管理

4 迫降轨迹设计结果




5 结束语
