工业机器人应用与企业内部薪酬差别的机制与效应研究
2023-10-05陈宗胜赵源
陈宗胜 赵源



摘要:企业内部不同人力资本员工的薪酬差别持续扩大已成为中国收入分配差别不断加剧的缩影,备受关注。构建一个引入高、低人力资本员工的理论模型,纳入外部机会,对模型中机器人应用后企业内部的薪酬差别变动进行推演,并以中国A股上市公司2012—2019年数据为样本,实证检验工业机器人应用对企业内部薪酬差别的影响效应。研究发现,工业机器人的应用水平提升会显著扩大企业内部高、低人力资本员工之间的薪酬差别,在利用Bartik工具变量法克服内生性干扰后依旧成立。机制检验结果显示,工业机器人应用能够通过增加高人力资本员工的外部机会,并同时挤占低人力资本员工的外部机会,使得二者间薪酬差别不断扩大;工业机器人应用对高、低人力资本员工生产率的非对称冲击同样加剧了二者的薪酬差别。异质性分析表明,非国有企业、出口贸易类企业内部薪酬差别的扩大效应更为明显。因此,在“机器换人”背景下,应通过完善企业内部薪酬合约设计、匹配个性化职业技能培训,增加低人力资本员工的外部机会,缓解企业内部薪酬差别进一步拉大。
关键词:工业机器人;机器换人;薪酬差别;外部机会;收入分配;人力资本
文献标识码:A 文章编号:100228482023(05)006113
一、问题提出
共同富裕是中国实行特色社会主义制度的本质要求,是中国人民在改革开放与经济发展中努力推动民族复兴的长远目标[1]。如何完善收入分配制度,缩小收入差别,特别是缩小企业内部的收入差别,是当前中国推进共同富裕进程中亟待回应的问题。通常认为,企业内部差别作为初次分配的结果,重点关注的是效率,然而实践证明,初次分配也必须“兼顾公平”,否则再大力度的再分配措施也无法矫正已经在初次分配中过大的收入差别。近年来,在总体收入差别及城乡内部收入差别都不同程度有所下降的情况下,中国企业仍保持过大内部高低人力资本员工的收入差距[2]。可见,居高不下的企业内部收入差别,已成为专家学者们高度关注的焦点[3]。与此同时,以工业机器人、人工智能及大数据、区块链等为代表的智能化、数字化技术变革,一方面带动经济转型升级和促进经济健康发展,为实现共同富裕奠定高质量经济基础;另一方面通过要素资源的再配置,重塑了企业内部的收入分配格局。为准确廓清工业机器人应用与企业内部薪酬差别之间的关系,必须对此进行专门研究,以助于社会经济持续均衡运行,同时也可为企业内部缩小初次分配差别,推进共同富裕,提供可行的思路与方向。
企业内部收入差别扩大的一个重要表现,往往是以公司高管为代表的高人力资本员工薪酬增速过快,从而使其与低人力资本员工之间薪酬差别急剧扩大[4],但是对于具体的影响原因却各持己见。比如Jensen等[5]认为企业内部薪酬差别扩大是最优契约的结果,因为提升薪酬差别能够有效缓解代理冲突,从而实现代理人(高管)与委托人(股东)利益目标的统一。有学者则运用高层梯队理论,发现高管的海外经历、经管教育背景等,都显著影响薪酬差别[67]。还有学者认为高管权力[8]、高管权力主导下薪酬黏性的非对称变动等[9],也都扩大了薪酬差别
企业内部薪酬差别可以从多个角度进行研究,本文集中讨论企业内部高人力资本员工与低人力资本员工薪酬差别,所以本文提及和研究的企业内部薪酬差别,实际上是企业内部高人力资本员工与低人力资本员工薪酬差别的简称。。此外,Faleye等[10]指出外部机会(outside opportunity)
所谓外部机会,是指通过增加企业间对劳动力的竞争性需求或是增加劳动力自愿离职的压力而获得的提高劳动力报酬的薪酬谈判能力[10]。也会通过影响企业员工的薪酬谈判能力而影响内部薪酬差别。随着工业机器人、人工智能等智能化技术的广泛运用,企业和劳动者所处的经济环境都发生了巨大的变化,而这一变化关乎员工的外部机会乃至其薪酬谈判能力[11]。
据此,本文基于外部機会视角,深入探究工业机器人应用对企业内部薪酬差别的影响机制和作用程度。理论上,受工业机器人等智能化技术应用的影响,企业对不同人力资本员工表现出差异化的需求,可能会影响员工的外部机会,而外部机会又决定了员工能否通过向企业施加可信压力(credible threat)
在文献中也有称为可信威胁(credible threat),基本意思完全一致。,使得其薪酬谈判能力乃至收入水平得到相应提升。在工业机器人需求冲击的背景下,拥有稀缺技能和专业知识的高人力资本员工属于稀缺要素,是经济增长的硬约束[12],而企业为适应自身技术发展的需要而不得不加大对高人力资本员工的竞争需求,从而为高人力资本员工提供了更多的外部机会。如果高人力资本员工没能在企业内部获取足够高的报酬激励,其离职寻求外部就业且对本企业造成损失的概率会提升。这一可信压力便使得高人力资本员工在与企业开展薪酬议价时的谈判能力增加,倒逼企业满足高人力资本员工的更高薪酬要求。然而,这一过程对低人力资本员工外部机会的影响却可能正好相反。工业机器人在企业内外的大面积运用,替代了那些原本由低人力资本员工从事的大部分工作,降低了企业内外对相关技能资本员工的需求,限制了相关技能资本员工的自由流动,而这无疑会在很大程度上压缩低人力资本员工的外部机会乃至削弱其薪酬谈判能力。绝大部分的低人力资本员工不可能像高人力资本员工那样,通过向企业施加可信压力提升其薪酬,外部机会的降低使其不得不接受企业提出的条件,最终可能引致企业内部高、低人力资本员工间薪酬差别加大。
与既有研究相比,本文可能的创新点在于:第一,首次考察了工业机器人应用对企业内部高、低人力资本员工之间薪酬差别的影响关系与微观作用机制;第二,为中国从体制上完善初次分配,缩小企业内部差别提供了新的切入点;第三,着重从高、低人力资本员工双重角度进行研究,为理解企业内部差别扩大提供了更为直接的机制分析。
二、理论分析及假说提出
本文在余玲铮等[13]的研究基础上,建立一个包含高、低人力资本员工与工业机器人的简单理论模型,并将外部机会纳入模型中分析,用以探究工业机器人应用影响企业内部薪酬差别的微观机制。
(一)工业机器人应用与企业内部薪酬差别
假定代表性企业采用如下要素投入进行生产:工业机器人,非机器人资本,高、低人力资本员工。生产函数如下:
Y=K1-αμL(σ-1)/σ+(1-μ)εM(ρ-1)/ρ+(1-ε)H(ρ-1)/ρρ(σ-1)/σ(ρ-1)ασ/(σ-1)(1)
其中,Y和K分别表示产出和非机器人资本。工业机器人,高、低人力资本员工均为刚性供给,工业机器人总供给为M,高、低人力资本员工总供给分别为H和L。参数α、μ、ε∈(0,1),σ>0,ρ>0,1-α表示非机器资本的产出弹性,σ表示工业机器人与低人力资本员工之间的替代弹性,ρ表示工业机器人与高人力资本员工之间的替代弹性。周广肃等[14]估算了中国各种职业被智能化技术替代的概率,结果显示,一些特殊化、高技能、创造性的工作岗位被智能化技术替代的概率较低,如各企事业单位的管理层等高人力资本员工,而一些重复性、程序化的工作岗位则呈现出较高的替代率,如从事生产型工作的低人力资本员工等。因而,从整体层面来看,工业机器人同高人力资本员工之间的替代弹性要明显小于其同低人力资本员工之间的替代弹性,即ρ<σ。
将企业单位产品的价格标准化为1,根据代表性企业利润最大化条件可得
WH=RM(M/H)1/ρ(1-ε)/ε(2)
WL=αμ(K/L)1/σRK/(1-α)(ασ-σ+1)/(ασ)(3)
其中,WH和WL分别表示高、低人力资本员工的工资薪酬,RM和RK分别表示工业机器人和非机器人资本的租金率。相应地,高、低人力资本员工间的薪酬差别可以表示为
WH/WL=(1-ε)RM(M/H)1/ρ(L/K)1/σ(1-α)/RK(ασ-σ+1)/(ασ)(4)
简化起见,对式(4)等号两边取对数后,可得
ln(WH/WL)=lnω=(1/ρ)lnM+ln(1-ε)L1/σRM/(αμεH1/ρK1/σ)+ln(1-α)/RK(ασ-σ+1)/(ασ)(5)
lnω/M=1/(ρM)>0(6)
由式(6)可知,工业机器人应用对高、低人力资本员工之间薪酬差别的影响为正,即工业机器人应用拉大了企业内部的薪酬差别。为此,本文提出以下假说:
假说1:工业机器人应用加剧了企业内部高、低人力资本员工之间的薪酬差别。
(二)工业机器人应用影响企业内部薪酬差别的渠道分析
Faleye等[10]研究指出,外部机会是影响员工薪酬谈判能力乃至收入水平的重要因素。谢申祥等[15]进一步研究发现,员工的薪酬谈判能力通常与如下两个方面的因素有关:第一,员工自身的个体特征,诸如员工的技能水平、社会关系等一系列反映员工人力资本与社会资本的因素;第二,员工和企业所处的经济环境。例如,如果经济环境受到冲击,刺激了企业对某类劳动者的竞争需求,此时该类劳动者就拥有了更多外部机会,在其他条件不发生变动的情况下,劳动者的薪资谈判能力提升[15]。
为此,本文将代表性企业中高、低人力资本员工的薪酬谈判能力δH[H(H)|ξH]、δL[L(L)|ξL]刻画为其个体特征ξH、ξL与外部机会H(H)、L(L)的函数。据此推断,高、低人力资本员工的外部机会与其劳动力需求息息相关,即企业對劳动力的竞争需求越大,劳动力的外部机会就越大,而劳动力的外部机会越大就越能通过向企业施加可信压力来提升其薪酬谈判能力。基于此,本文将高、低人力资本员工的外部机会设定为其劳动力需求的增函数,具体如下:
H(H)=ν(H)
L(L)=ν(L)(7)
其中,高人力资本员工的外部机会H(H)由其劳动力需求函数ν(H)表征,由于ν(H)为增函数,所以ν(H)/H>0。同理,低人力资本员工的外部机会L(L)也是其劳动力需求的增函数,即ν(L)/L>0。
从直觉上看,工业机器人应用很难通过改变劳动者的个体特征(ξH、ξL)来直接影响其谈判能力,只能通过改变劳动者所处的经济环境来影响其外部机会,也即工业机器人应用可能会通过影响高、低人力资本员工的劳动力需求而影响其薪酬谈判能力乃至工资薪酬。
根据利润最大化一阶条件,可求得高、低人力资本员工的劳动力需求函数为
H=M(1-ε)RM/(εWH)ρ(8)
L=εM(ρ-1)/ρ+(1-ε)H(ρ-1)/ρ(ρ-σ)/(ρ-1)μWHH1/ρ/WL(1-ε)(1-μ)(9)
对式(8)进行对数化,可得
lnH/M>0(10)
式(10)表明,工业机器人应用增加了以高人力资本员工劳动力需求为表征的高人力资本员工外部机会。
借鉴余玲铮等[13]的处理方法,对式(9)进行线性对数化,近似可得
lnL=ε(M/H)(ρ-1)/ρ+(1-ε)(ρ-σ)/(ρ-1)+lnμWHH1/ρ/WL(1-ε)(1-μ)σ(11)
lnL/M=ε(ρ-σ)/ρH(1-ρ)/ρ(1/M)1/ρ(12)
此时,式(12)的正负主要由ρ-σ的符号决定。根据假设工业机器人与高人力资本员工之间的替代弹性要小于其与低人力资本员工之间的替代弹性(ρ<σ),因此ε(ρ-σ)/ρH(1-ρ)/ρ(1/M)1/ρ<0。这意味着,工业机器人应用挤占了以低人力资本员工劳动力需求为表征的低人力资本员工外部机会。
根据谢申祥等[15]的研究可知,劳动者的薪酬收入等于其薪酬谈判能力与保留工资之和。而在员工个体特征一定的情形下,员工的薪酬谈判能力由其外部机会决定。为此,高、低人力资本员工的薪酬收入表达式为
WH=δH[H(H)|ξH]+WH0
WL=δL[L(L)|ξL]+WL0(13)
其中,WH0、WL0分别代表高、低人力资本员工的保留工资。
结合式(7)(10)(13)可知,工业机器人应用通过提升企业对高人力资本员工劳动力的需求,为高人力资本员工创造了更多的外部机会。即工业机器人应用通过增加高人力资本员工的外部机会,提升其薪酬谈判能力乃至扩大了内部薪酬差别。同理,根据式(7)(12)(13)可知,工业机器人应用直接通过降低企业对低人力资本员工的劳动力需求来减少其外部机会。即工业机器人应用通过挤占低人力资本员工的外部机会,削弱其薪酬谈判能力,进而拉大了内部薪酬差别。为此,本文提出以下假说:
假说2:工业机器人应用通过增加高人力资本员工外部机会以及削减低人力资本员工外部机会的方式拉大二者的薪酬差别。
诸多研究表明,工业机器人等智能化技术的应用势必会促进生产率的提升,但是不同劳动群体因技能禀赋等人力资本因素的差异而受到智能化技术的生产率冲击并非一致。就本文而言,高人力资本员工与智能化技术的互补性,使得其更易借助智能化技术提升自身生产率,低人力资本员工因其不具备人工智能时代所需的技能水平[16],所以很难凭借智能化技术提高自身生产率[17]。在工业机器人等智能化技术广泛应用的背景下,那些拥有高生产效率与强智能机器适配性的高人力资本员工属于稀缺要素,是经济增长的硬约束[12]。当其他条件既定时,员工的稀缺属性加大了企业之间对其的竞争性需求[18],从而有利于高人力资本员工对企业施加可信威胁,最终引致其外部机会及收入水平的提升。由此可见,员工的生产效率越高,与智能机器的适配性相对越高,则其外部机会就越多,从而越有助于员工薪酬水平的提升。基于上述分析,本文提出以下假说:
假说3:工业机器人应用会通过非对称提升高、低人力资本员工生产率的方式加剧二者的薪酬差别。
三、检验模型与变量选取
(一)检验模型设定
本文的实证检验模型设定如下:
lngapjct=α0+α1lnrobjct+βXjct+ηIct+dj+dt+εjct(14)
其中,被解释变量lngapjct表示第t年c行业j企业的内部薪酬差别的对数;核心解释变量为lnrobjct,是企业层面工业机器人应用程度的对数;α1为本文重点关注的估计系数,如果工业机器人应用使得企业内部薪酬差别扩大,则系数预期为正;Xjct中包含了企业层面的控制变量,Ict为行业控制变量。此外,本文还控制了企业和年份(dj和dt)固定效应,εjct为随机干扰项。
(二)相关变量选取
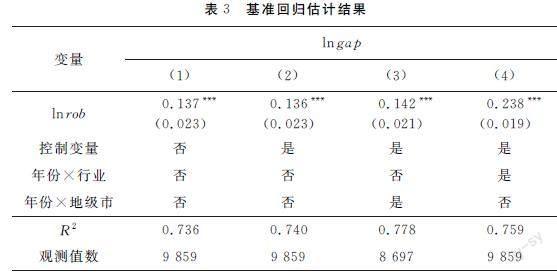
(1)企业内部高、低人力资本员工薪酬差别(简称企业内部薪酬差别)。既有研究多选用劳动者的受教育程度或职业类别作为劳动者人力资本的代理变量[19],本文囿于不同学历水平员工收入数据不可得,最终选择根据职业类别将员工划分为高、低两类。具体方法为:将高管(总经理)、董事(不包括独立董事)和监事划分为高人力资本员工,其余则为低人力资本员工。在此基础上,将二者平均薪酬比值作为企业内部高、低人力资本员工薪酬差别指标的代理变量,取对数后记作lngap。借鉴孔东民等[20]的研究,高人力資本员工平均薪酬等于高管薪酬总额除以管理层规模;低人力资本员工平均薪酬等于应付职工薪酬总额变化值加上支付给职工以及为职工支付的现金减去高管薪酬总额再除以员工人数。这里将管理层规模定义为“董监高总人数—独立董事人数—未领取薪酬董监高人数”。
(2)企业工业机器人应用程度。本文参考已有研究[21],利用Bartik工具变量法构建了企业层面的工业机器应用程度指标robjct,该指标测度了c行业j企业在t年的工业机器人应用程度。具体公式如下:
robjct=(WRAct/LAct0=2010)×(WPjct0=2011/MWP2011)(15)
其中,WRAct为中国c行业t年的机器人存量,LAct0=2010为中国c行业2010年(t0表示基期)的就业人数,WRAct/LAct0=2010测度了中国c行业t年的机器人密度。WPjct0=2011为中国工业部门中c行业j企业在基期(2011年)的生产人员人数,MWP2011表示中国工业部门中全部企业在基期(2011年)生产人员人数比例的中位数。
(3)工具变量。根据锦标赛理论
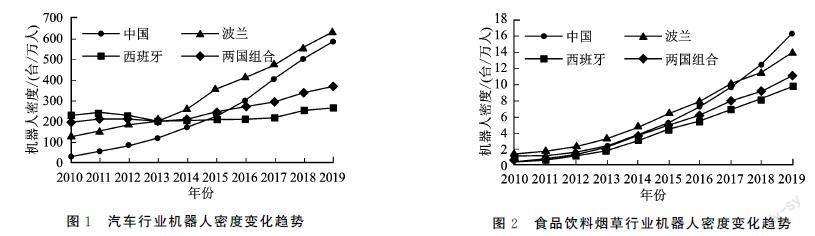
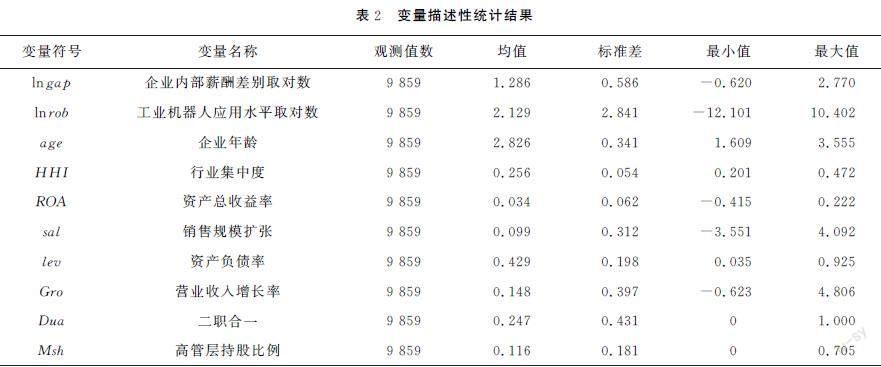
指较高的薪酬差距能够激发高管等高人力资本员工群体产生锦标赛效应,从而激励高管人员加倍通过关于工业机器人等新兴智能化技术的应用、研发和创新以获取职位晋升后的差距奖励。,扩大薪酬差别可能会激励企业内部关于工业机器人等新兴智能化技术的研发创新[20],因而易产生逆向因果问题,同时囿于模型与可得数据的限制,现仍无法捕捉到所有遗漏变量。为此,有必要选取适宜的工具变量,用以尽量规避由内生性引发的估计偏差。首先,借鉴既有研究[21],利用美国行业机器人密度(WRUSAct/LUSAct0=1990)代替中国行业机器人密度引入式(15)构造中国公司级机器人应用程度作为工具变量(取对数后记作rab)。其次,本文还选取工业机器人行业渗透度领先于中国的科技前沿国家来构建公司层面的工具变量,这里主要采用经波兰行业机器人密度(WRPct/LPct0=1990)与西班牙行业机器人密度(WRSct/LSct0=1990)二者基期机器人存量比例调整后的行业机器人密度引入式(15),计算出中国企业机器人应用程度的另一工具变量(取对数后记作rpb)。本文利用波兰、西班牙国家的机器人数据构造工具变量原因为:一方面,在汽车、食品饮料制造等机器人应用的主要行业,中国机器人应用的发展趋势与这些技术领先国家比较接近。如图1和2所示,在样本期内两国的行业机器人渗透程度基本上领先同期的中国,但其变动趋势与中国颇为相似。另一方面,本文借鉴王永钦等[21]的思路,使用以波兰、西班牙二者基期机器人存量比例调整后的行业机器人密度作为工具变量。Borusyak等[22]指出,这种形式的工具变量称为份额转移(shiftshare),并认为这类工具变量的外生性可以通过满足外生冲击(shift)的外生性来实现工具变量的外生性条件。在本文中,份额对应为工业部门c行业j企业2011年生产部门员工占比与工业部门所有企业2011年生产部门员工占比中位数的比值,shift部分使用波兰、西班牙两国基期机器人存量比例调整后的行业机器人密度表示。结合Borusyak等[2223]的研究思路可知,工业机器人前沿国家(美国、波兰与西班牙)在行业层面上的工业机器人密度变动并不能轻易借助影响中国企业的个体特征来影响企业内部薪酬差别,因此工具变量的外生性条件可以满足。为更进一步说明工业机器人在机器人技术领先国家行业层面上的变动不会影响到中国企业期初特征,本文从企业层面做平衡检验,结果见表1。被解释变量为企业初始时期(2012年)的个体特征变量,包括治理特征与财务特征,核心解释变量为工具变量rab与rpb。结果表明,中国企业期初与工具变量均无显著关系,这意味着工具变量并不会通过影响中国企业的个体特征来影响企业内部的薪酬差别。
(4)控制变量。借鉴柳光强等[67,20,24]的研究,选取的具体控制变量为:企业年龄(age),用“ln(调查年份-企业成立年份+1)”计算得到;总资产收益率(ROA),用“净利润/总资产余额”测度;资产负债率(lev),是企业总负债占资产总计的比例;企业营业收入增长率(Gro),用“当年营业收入/(上一年营业收入-1)上”衡量;企业销售规模扩张(sal),用企业销售收入增长率取对数表示;高管层持股占比(Msh),用高管层持股数量除以总股本;两职合一(Dua),董事长与总经理是同一个人为1,否则为0;行业控制变量为以企业营业收入计算的行业市场集中度(HHI)。
(三)数据来源
(1)工业机器人数据来自国际机器人联合会(IFR),该数据库提供全球主要经济体的机器人统计数据。考虑到IFR采用的经济行业分类标准有别于中国,本文借鉴王永钦等[21]的划分方法,同时参照《国民经济行业分类》(2017)重新匹配后获取了包含制造业(二级行业)、采矿业、电力、热力、燃气及水生产和供应业等共计17个行业数据
限于篇幅文中没有汇报,留存备索。。工业机器人进出口的数据可由联合国贸易和发展数据库(UNCTAD)获得。
(2)本文选择使用2012—2019年中国A股上市企业数据开展实证分析,并依据如下方法筛选原始数据:首先剔除ST、ST、PT(特别转让)及金融业的公司数据,其次删除主要变量为缺失值的数据并进行缩尾处理。此外,公司财务、职工薪资及人员构成等指标来自Wind数据库和国泰安数据库。
(3)中国工业的就业数据分别来自《中国工业统计年鉴》《中国人口与就业统计年鉴》,美国、波兰、西班牙等国家的分行业就业数据源于香港环亚经济数据库(CEIC)。
四、实证分析及稳健性检验
(一)基准结果:工业机器人应用对企业内部薪酬差别的影响
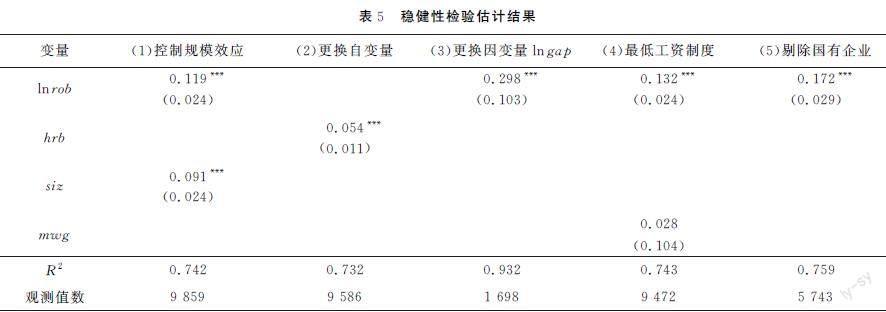
基于式(14),本文采用2012—2019年上市公司数据,探究工业机器人应用对企业内部薪酬差别的影响关系,估计结果见表3第(1)(2)列。工业机器人应用程度(lnrob)的回归系数均在1%水平上显著为正,这意味着工业机器人应用程度的提高拉大了企业内部的薪酬差别(lngap)。从经济意义上分析,企业面临的工业机器人应用程度每提高1%,其内部薪酬差别会扩大0.137%,这说明,工业机器人的广泛应用对加剧企业内部薪酬差别确实存在不容小觑的作用。此外,本文进一步控制所有随时间变化和不随时间变化的地区及行业层面的因素,回归结果见第(3)(4)列,lnrob的回归系数值仍显著为正。总体而言,上述回归结果支持了本文的假说1,即工业机器人应用加剧了企业内部薪酬差别。
(二)稳健性检验
1.内生性问题
除了使用美国行业机器人数据构造的工具变量rab外,本文还尝试利用经波兰、西班牙两国基期机器人存量比例调整后的行业机器人数据构造的工具变量rpb解决工业机器人应用对企业内部薪酬差别影响存在的内生性问题。表4汇报了两阶段最小二乘法(2SLS)的检验结果。第(1)(2)列显示,第一阶段检验结果的F值均大于10,表明不存在弱工具变量问题,即工具变量rab和rpb与内生变量lnrob在统计上存在较强的相关性。第二阶段检验结果表明,工业机器人应用对企业内部薪酬差别的影响仍为正向显著,这表明本文的研究结论稳健可靠。
2.稳健性分析:控制规模效应
既有文献表明,机器人等智能化技术应用能够产生企业规模效应[25],而企业规模效应是引发企业内部薪酬差别的关键性因素[24]。因此,为了尽可能排除上述效应存在而产生的估计偏差,本文将其纳入基准模型式(14)中进行重新估计。这里,本文使用企业规模(siz)表征规模效应[25]。如表5第(1)列结果所示,在控制了规模效应对企业薪酬差别的影响之后,工业机器人应用对薪酬差别的拉大作用依然存在。其中,规模效应显著扩大了企业内部薪酬差别,这与陈良银等[24]的研究结论相一致。
3.稳健性检验:更换自变量与因变量
为了剔除自变量测度方法对回归结果的干扰,本文参照李磊等[26]的研究思路,采用行业机器人平均进口强度以重新构建工业机器人应用程度指标,获取替代指标hrb,检验结果见表5第(2)列。结果显示,在更换自变量工业机器人应用程度后,回归结果依然显著为正。
前文依据员工职业类别将高管与普通员工划分为高、低两类人力资本员工,为了尽量消除指标构建对估计结果的影响,参考李红阳等[19]的研究本文又进一步将企业内部专业技术人员界定为高人力资本员工,生产类等人员界定为低人力资本员工,并将二者的平均薪酬之比作为测度企业内部高、低人力资本员工薪酬差别的另一代理变量,取对数记作lngep。其中,生产类人员平均薪酬等于生产类员工薪酬总额除以生产类人员数量;专业技术研发人员平均薪酬等于“研发费用工资薪酬”除以技术研发人员数量。需要说明的是,由于生产员工的薪酬总额数据缺失,本文用“支付给职工以及为职工支付的现金-高管层年度薪酬總额-研发费用工资薪酬-工资薪酬销售费用-工资薪酬管理费用”测度。表5第(3)列报告了更换因变量企业内部薪酬差别后的稳健性检验结果,工业机器人应用的影响系数依然为正向显著,这意味着工业机器人应用加剧了企业内部高、低人力资本员工的薪酬差别,这与因变量衡量方法的选择没有实质关系。
4.稳健性检验:排除其他干扰因素
为了最大限度地排除最低工资制度和中国2015年国有企业“限薪令”政策实施对本文结论有效性的影响,本文一方面在基准模型中纳入了企业所处地区的最低工资标准(mwg),另一方面将原企业数据中的国有企样本予以剔除后再利用基准模型重新进行估计,回归结果如表5第(4)(5)列所示,工业机器人应用的影响方向与基准回归结果保持一致,均为正向显著。
五、机制检验与异质性分析
(一)外部机会
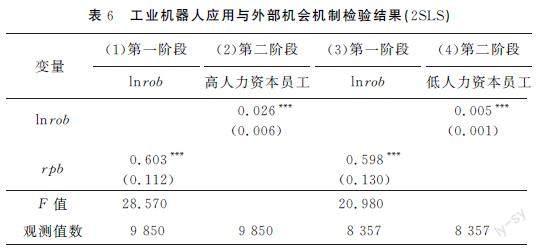
前文基础模型论证了工业机器人应用加剧了企业内部高、低人力资本员工之间的薪酬差别,而其作用渠道主要在于工业机器人的广泛应用引发了高、低人力资本员工外部机会的非对称变化,进而造成其薪酬谈判能力以及薪酬差别的变动。本文借助以下指标检验工业机器人对企业内部薪酬差别扩大的影响是否归因于高、低人力资本员工外部机会的变化。一是使用企业对高管劳动力需求的变化测度高人力资本员工的外部机会,即企业对高人力资本员工的劳动力需求越大,高人力资本员工的外部机会就相对越大,与之相应的薪酬谈判能力则相对越强[10];二是选取岗位更迭率
具体的构建方法采用生产部门人员的人均非研发资本存量占剔除生产部门人员后人均研发资本存量的比值衡量,其中研发资本存量为企业的“研发支出合计”,总资本存量为企业的“固定资产合计”,非研发资本存量为二者的正向差额[27]。作为表征低人力资本员工外部机会的逆向指标。该指标刻画了低人力资本员工就业岗位被自动化生产所替代的程度,值越大表明替代率越高,与之相关的外部机会就越小。根据理论模型的结论,随着工业机器人需求冲击,企业对低人力资本员工类劳动力,特别是从事生产类的低人力资本员工的需求不断下降。这意味着,低人力资本员工对自动化敏感度越高,工业机器人对低人力资本员工的替代率就越高。即工业机器人应用带来的智能化生产替代了低人力资本员工的简单劳动,引致企业对该类型劳动力需求的萎缩,进而导致低人力资本员工外部机会乃至薪酬水平的恶化。
机制检验结果见表6,其中第(2)列结果表明,工业机器人应用显著提升了高人力资本员工的外部机会,即工业机器人应用通过增强高人力资本员工的外部机会拉大薪酬差别。第(4)列结果显示,工业机器人应用显著削减了低人力资本员工的外部机会,即工业机器人应用凭借挤压低人力资本员工的外部机会扩大企业内部薪酬差别。一方面,在人工智能和工业机器人等智能化技术需求冲击的背景下,智能化技术促进自动化生产所替代的只是一部分劳动,智能化技术也可作为赋能工具,帮助改善劳动生产率,同时增加对某类特定劳动的需求,比如对自动化不敏感的、智能化技术起协助作用的工作[18]。而掌握大量稀缺资源禀赋的高人力资本员工其主要从事管理、协调等一系列不易被智能化技术复制替代的工作[14],正是高人力资本员工的这一稀缺性特质,刺激了企业对此类特定劳动的需求,进而增强其外部机会乃至薪酬谈判能力;另一方面,相比之下,同一行业内工业机器人、人工智能等新型智能化技术的大面积运用,替代了那些原本主要由低人力资本员工从事的程序化、重复性强的工作,比如生产加工类的工作[14],从而减少了企业间对相关技能低人力资本员工劳动力的需求,限制了相关技能低人力资本员工劳动力的自由流动,最终挤占了相关技能低人力资本员工劳动力的外部机会乃至其相对薪酬谈判能力。
(二)生产率效应
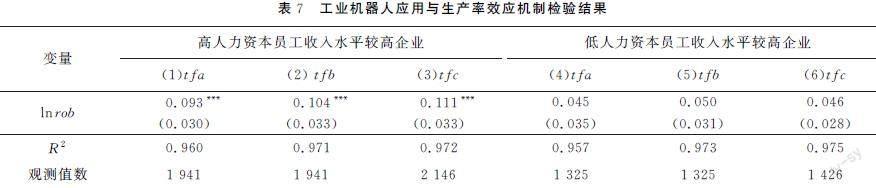
根据前文理论分析可知,工业机器人等智能化技术应用可能会通过改变员工自身机能影响其收入的变动,即智能化技术应用更有助于高人力资本员工而非低人力资本员工生产率的提升。为此,借鉴胡晟明[28]对生产率效应的检验思路,按照高、低人力资本员工平均薪酬水平划分企业样本
本文借鉴胡晟明[28]的设计思路,利用如下方法精确地界定高人力资本员工收入水平较高企业和低人力资本员工收入水平较高企业:将企业样本依次按照高管平均薪酬、普通员工平均薪酬以及高管与普通员工平均薪酬比的高低分类,其中高管平均薪酬和高管与普通员工薪酬比排在前50%且普通员工平均薪酬排在后50%的企业界定为高人力资本员工收入水平较高企业,同理高管平均薪酬和高管与普通员工薪酬比排在后50%且普通员工平均薪酬排在前50%的企业界定为低人力资本员工收入水平较高企业。,通过分样本检验工业机器人应用是否对不同人力资本员工收入水平企业的生产率产生差异影响,以验证工业机器人应用可能会更多增加高人力资本员工收入水平较高企业的生产率,从而扩大薪酬差别。计量模型构建如下:
tfpGhjct=αGh0+αGh1lnrobjct+βGhXGhjct+ηGhIct+dGhj+dGht+εGhjct(16)
tfpYhjct=αYh0+αYh1lnrobjct+βYhXYhjct+ηYhIct+dYhj+dYht+εYhjct(17)
其中,tfpGhjct表示高人力资本员工收入水平较高企业全要素生产率,tfpYhjct表示低人力资本员工收入水平较高企业全要素生产率 囿于数据限制,目前尚无法测算出企业内部不同人力资本员工的劳动生产率。本文选择从企业全要素生产率的角度考察员工的生产率效应。其中,本文使用LP法、OLS和固定效应方法测算企业全要素生产率,并分别记作tfa、tfb和tfc。。当αGh1相较αYh1更显著时,工业机器人应用更有助于促进高人力资本员工收入水平较高企业全要素生产率的提升,使得高人力资本员工收入水平较高企业的薪酬收入相较低人力资本员工收入水平较高企业增加,进而扩大二者间薪酬差别。表7结果显示,工业机器人应用对LP法、OLS和固定效应方法测度的高人力资本员工收入水平较高企业全要素生产率为正向且在1%水平上通过显著性检验,但是对低人力资本员工收入水平较高企业全要素生产率的影响均不显著。由此表明,工业机器人应用通过非对称提升不同人力资本员工的生产率,加劇生产率分布的不均等程度,引发高、低人力资本员工的薪酬差别扩大。
(三)异质性分析
1.区分企业所有权特征
一般而言,技术变革对薪酬差异的影响是基于一定条件的,例如,在美国等发达国家,强大的工会组织可能降低机器替代人工的概率,进而重塑企业薪酬分配结构[13]。在中国,国有企业通常肩负稳定就业的社会责任,这使得其在采用新型生产技术时会更加审慎。比如,从工业机器人的普及情况来看,国有企业的机器人应用率远不及非国有企业[21]。再者,国有企业的薪酬决定模式更侧重员工间的相对公平[29]。比如,国有企业内部于2009和2015年先后实施了“限薪令”,这对于限制国有企业高人力资本员工薪酬增速过快起到了一定的作用。因此,与国有企业相比,非国有企业内部薪酬差别可能更加明显。
为了验证上述理论预期,本文首先依照上市公司的属性,将中央及地方国有企业划分为国有企业,其余则为非国有企业。其次设定国有企业哑变量Soe,与工业机器人应用程度lnrob交乘后引入基准模型中,检验结果见表8第(1)列。其中,交互项(lnrob×Soe)的影响系数在5%水平上显著为负,表明工业机器人应用对非国有企业内部薪酬差别的扩大作用更加显著。显然,工业机器人对企业内部薪酬差别的影响,会随着企业所有权性质的不同而呈现差异化。
2.企业对外贸易
近年来,中国东部地区的“机器换人”如火如荼地进行,特别是以出口加工贸易为主的企业,工业机器人的大面积应用正逐步挤占执行常规类任务劳动者(如从事生产加工类的低人力资本员工)的就业岗位。
余玲铮等[13]认为,贸易的变化会通过改变劳动者执行任务的类型重塑任务技能的需求以及薪酬分配。那么,企业是否开展对外贸易业务会不会对工业机器人影响企业内部薪酬差别产生一定的推动作用呢?
为此,本文首先借助“海外业务收入”与“主营收入构成(按地区)”这两个变量识别上市企业中开展对外贸易业务的样本,将其设定为哑变量Exp,如果企业开展对外贸易业务,则Exp取值为1,否则为0。其次,将交乘项lnrob×Exp加入基准模型,检驗结果见表8第(2)列。交乘项的影响系数为正向显著,表明机器人对薪酬差别扩大作用在开展对外贸易的企业中最为突出。
六、结论和启示
本文通过建立纳入高、低人力资本员工外部机会模型推演工业机器人应用对企业内部薪酬差别的影响机理,并利用企业面板数据进行了实证分析,研究结果表明:工业机器人应用加剧企业内部高、低人力资本员工之间薪酬差别的拉大,其主要原因是工业机器人应用对高、低人力资本员工外部机会和生产率的非对称冲击,使得高人力资本员工外部机会增加,低人力资本员工外部机会相对减少,进而拉大二者之间的薪酬差别。工业机器人应用对非国有企业、出口贸易类企业内部薪酬差别的扩大作用更为突出。本文的研究结论具有如下政策启示:
第一,加强个性化职业技能培训与工会组织建设,多维度提升低人力资本员工的薪酬谈判能力。一方面,要持续重点关注企业内部低水平、低学历以及从事生产加工等常规类工作的低人力资本员工群体,并为之提供相匹配的职业技能培训,以期不断拓宽低人力资本员工的多元职业技能;另一方面,还应当着重提升低人力资本员工的非常规技能,比如沟通、交流、组织、协调等一系列不易被智能化技术复制替代的隐形能力,以增进其与智能机器人的适配性;同时,还应当加强各企业内部与各地区间劳动工会组织的建设,增强弱势低人力资本员工群体的集体薪酬谈判能力。
第二,敦促相关企业完善其内部薪酬合约设计,实现效率与公平的有效统一。基于工业机器人技术的应用,在非国有、对外贸易类企业中的薪酬差别扩大作用更显著,政府部门应当“因地制宜”,在不干预和影响企业绩效提升的同时,指导企业兼顾内部收入分配的相对公平。例如,政府应该积极敦促非国有企业及对外贸易类企业优化薪酬体系设计,实行多维度的绩效激励机制,并引导企业不断优化内外监督机制,适时增加内部薪酬分配的透明度。此外,鉴于出口贸易类企业多集聚于东部地区,为防止过度集中可能导致收入不平等的加剧,应当加大对当地低人力资本员工群体在住房、医疗及养老方面的补贴,同时积极将企业内部富余劳动力引流到目前不易被智能化技术替代的职业岗位,比如一些基础服务性岗位,等等。
第三,利用税收政策,调节企业内部收入分配。改革收入所得税制度,逐步降低高、低人力资本员工群体的收入税率及起征点,相应适度增加企业高管层等高人力资本员工的工资性收入及资产性的收入税率,必要时可在深入研究的前提下对企业和高级管理层按使用工业机器人的数量进行征税。同时,利用税收优惠、财政补贴等措施引导对企业工业机器人应用决策的影响,引导其在薪酬分配时着重考虑低人力资本员工利益,同时吸纳企业内部“冗余”员工,以缓解工业机器人技术发展对薪酬分配造成的负面冲击。
参考文献:
[1] 陈宗胜.综合运用经济发展、体制改革及分配举措推进共同富裕[J].经济学动态,2021(10):1933.
[2] 魏志华,王孝华,蔡伟毅.税收征管数字化与企业内部薪酬差距[J].中国工业经济,2022(3):152170.
[3] SONG J,PRICE D J,GUVENEN F, et al.Firming up inequality [R]. National Bureau of Economic Research Working Paper,No.21199, 2015.
[4] 张昭,马草原,杨耀武. 薪酬管制会抑制企业高管的超额薪酬吗:基于2015年“限薪令”的准自然实验[J].当代经济科学,2021(5):114127.
[5] JENSEN M C, MECKLING W H. Theory of the firm:managerial behavior, agency costs and ownership structure[J].Journal of Financial Economics,1976,3(4):305360.
[6] 柳光强,孔高文.高管海外经历是否提升了薪酬差距[J].管理世界,2018(8):130142.
[7] 柳光强,孔高文.高管经管教育背景与企业内部薪酬差距[J].会计研究,2021(3):110121.
[8] 黎文靖,胡玉明.国企内部薪酬差距激励了谁?[J].经济研究,2012(12):125136.
[9] 方军雄.高管權力与企业薪酬变动的非对称性[J].经济研究,2011(4):107120.
[10]FALEYE O, REIS E, VENKATESWARAN A. The determinants and effects of CEOemployee pay ratios[J].Journal of Banking Finance,2013,37(8):32583272.
[11]OBERDABERNIG D A. Employment effects of innovation in developing countries:a summary[R]. Swiss Programme for Research on Global Issues for Development R4D Working Paper, 2016.
[12]BENZELL G S, BRYNJOLFSSON E. Digital abundance and scarce genius:implications for wages,interest rates,and growth[R]. National Bureau of Economic Research Working Paper,No.25585,2019.
[13]余玲铮,魏下海,孙中伟,等.工业机器人、工作任务与非常规能力溢价:来自制造业“企业—工人”匹配调查的证据[J].管理世界,2021(1):4759.
[14]周广肃,李力行,孟岭生.智能化对中国劳动力市场的影响:基于就业广度和强度的分析[J].金融研究,2021(6):3958.
[15]谢申祥,陆毅,蔡熙乾.开放经济体系中劳动者的工资薪酬谈判能力[J].中国社会科学,2019(5):4059.
[16]KORINEK A, STIGLITZ J E. Artificial intelligence and its implications for income distribution and unemployment[R]. National Bureau of Economic Research Working Paper,No.24174, 2017.
[17]PRETTNER K, STRULIK H. The lost race against the machine: automation, education and inequality in an R&D:based growth model[R]. Center for European Governance and Economic Development Research Discussion Paper,No.329,2017.
[18]郭凯明.人工智能发展、产业结构转型升级与劳动收入份额变动[J].管理世界,2019(7):6077.
[19]李红阳,邵敏. 城市规模、技能差异与劳动者工资收入[J].管理世界,2017(8):3651.
[20]孔东民,徐茗丽,孔高文.企业内部薪酬差距与创新[J].经济研究,2017(10):144157.
[21]王永钦,董雯.机器人的兴起如何影响中国劳动力市场:来自制造业上市公司的证据[J].经济研究,2020(10):159175.
[22]BORUSYAK K, HULL P, JARAVEL X. Quasiexperimental shiftshare research designs[J].Review of Economic Studies, 2022(89):181213.
[23]陈媛媛,张竞,周亚虹.工业机器人与劳动力的空间配置[J].经济研究,2022(1):172188.
[24]陈良银,黄俊,陈信元.混合所有制改革提高了国有企业内部薪酬差距吗?[J].南开管理评论,2021(8):150162.
[25]陈宗胜,赵源.不同技术密度部门工业智能化的就业效应:来自中国制造业的证据[J].经济学家,2021(12):98106.
[26]李磊,王小霞,包群.機器人的就业效应:机制与中国经验[J].管理世界,2021(9):140118.
[27]胡晟明,王林辉,董直庆.工业机器人应用与劳动技能溢价:理论假说与行业证据[J].产业经济研究,2021(4):6983.
[28]胡晟明.中国工业智能化对劳动收入不平等的影响研究[D].上海:华东师范大学,2022:115116.
[29]张车伟,薛欣欣.国有部门与非国有部门工资差异及人力资本贡献[J]. 经济研究,2008(4):1525.
[本刊相关文献链接]
[1] 王春凯,许珍珍.互联网发展对区域劳动力就业匹配的影响研究:基于人力资本—产业结构视角[J].当代经济科学,2023(4):127138.
[2] 李琬,张国胜,杨明洪.互联网使用如何影响社会公平感?[J].当代经济科学,2023(4):4558.
[3] 柴建,王瑶瑶,李晓芬,等.中国收入差距核心影响因素提取与非线性动态影响效应研究[J].当代经济科学,2023(1):7488.
[4] 黄诗华,陈艳,陈邑早,等.高管薪酬公平感知与公司股价崩盘风险[J].当代经济科学,2022(6):97111.
[5] 田瑶,郭立宏.数字普惠金融缩小收入差距了吗:来自中国家庭追踪调查的经验证据[J].当代经济科学,2022(6):5770.
[6] 张宽,黄凌云.结构的力量:人力资本升级、制度环境与区域创新能力[J].当代经济科学,2022(6):2841.
[7] 贺建风,吴慧.基于列联表方法的中国居民收入流动性测度[J].当代经济科学,2022(3):1327.
[8] 蒋艺翅,姚树洁.信息披露质量对企业创新的激励与治理效应研究[J].当代经济科学,2022(2):117128.
[9] 沈悦,赵强,朱雅玲.动态视角下技能溢价对居民消费影响的非线性特征研究[J].当代经济科学,2022(1):92103.
[10]李翠妮,葛晶,赵沙俊一.人工智能、老龄化与经济高质量发展[J].当代经济科学,2022(1):7791.
[11]李后建,王颖.最低工资标准如何影响企业产能过剩[J].当代经济科学,2017(6):7990.
[12]呼建光,肖萌,姜思宇.国有企业高管限薪:有效管制还是过度干预[J].当代经济科学,2017(3):108115.
编辑:郑雅妮,高原
