基于DoDAF 的无人直升机辅助反潜作战系统建模分析研究
2023-09-28李恒
李 恒
(中国直升机设计研究所,江西景德镇 333001)
0 引言
近年来,随着战争向信息化、无人化方向发展,无人直升机的军事应用价值得到高度重视,进入加速发展的时期,其中以“火力侦查兵”最为典型。无人直升机具有使用风险小、成本低、任务能力强的优点,最重要的是它可代替有人机来执行特殊作战任务,大大提高了任务安全性[1]。在现代海战中,阻止敌方力量使用鱼雷等武器发射有利地形是水面舰艇编队近程防御的重要目标。考虑到目前我国潜在对手潜艇装备的反舰鱼雷有效攻击距离,编队近程防御反潜作战半径应不小于50km。由于“安静型”潜艇辐射噪声明显降低,导致了声纳探潜手段效能的大幅度下降,而当派遣反潜直升机近距离精准探测时,危险性提高。这时,无人直升机的优点彰显无遗。无人直升机携带磁探仪或其他精准探测设备近距离辅助探潜,发现目标,再派上反潜直升机进行打击,有力地发挥有人反潜直升机作战平台的协同作战优势。很大程度上增强了海上编队的体系作战能力[2]。
DoDAF 本质上是属于开发体系结构的基本框架之一,该方法具有实用性强的特点。当前,美军集成与开发系统的主要标准便是基于该体系架构,国内一些单位也运用DoDAF 理论指导产品设计和模型构建,进行了一些卓有成效的工作。在研究DoDAF 体系结构开发理论基础上,本文提出了一种无人直升机辅助有人直升机探潜系统模型构建方法,从根本上阐明了无人直升机辅助有人直升机反潜作战的活动过程,可对无人直升机辅助有人直升机作战体系流程设计和作战指挥控制给予有效的支撑。
1 作战体系结构设计
1.1 DoDAF 建模思想
该种体系架构建模思路主要分为两步:第一步将整个作战体系模型的构建划分为易于区分的几个阶段;第二步按照作战阶段中各阶段侧重点解决不同的建模问题。这种方法的优点是逐步推进系统模型的构建,减少了整套系统模型设计的难度,便于清晰地获得每一步的工作重点,使得整个建模过程更加简单明了,容易被各行各业工作人员快速掌握[3]。各个工作阶段都明确确立了任务完成的目标和要求,一旦发生问题,立刻就在当前阶段处理消除,进行最终的仿真验证[4],而不必等到所有工作完成,通过“化整为零”的方法提高设计效率。
1.2 作战体系结构输出成果
DoDAF 体系结构根据需要定义了一系列的标准视图,即输出产品。从各个维度体现参与作战的各方系统信息的组织架构。对无人直升机辅助有人直升机反潜作战体系进行设计的主要任务是描述整个作战系统支持的作战体系概念,这种作战概念的主要内容包括完成无人直升机反潜任务的活动、参与人员之间的数据流通、体系关键要素等,表1 列出了主要作战视图产品。

表1 DoDAF作战视图产品及相关说明
1.3 作战体系结构设计
整个作战体系结构产品之间相互关联,并且相互依赖。因此,可按照以下步骤进行作战体系结构设计[5]。
(1)确立高级作战概念图(OV-1)。高级概念图是用文字或图形对相关内容进行描述的一种方式,有利于高级决策者之间进行交流。图形化的描述作战想定过程,分析作战概念、作战使命等。
(2)明确作战节点、作战活动和组织指挥关系。包括OV-2、OV-5 和OV-4。OV-2 包含作战节点、连接关系以及信息交互要求等内容;OV-5 则是对主要作战活动的层次关系以及作战活动相互间的输入、输出关系进行描述和阐明;OV-4 的主要目的则是对组织、组织类型、人员角色以及它们间的指挥关系进行描述。
(3)确定作战事件,即OV-6c。OV-6c 是用来描述在特定的作战场景下,作战节点间的信息交换随时间的变化过程。
(4)确定单个节点内部状态转移关系,即OV-6b。OV-6b 是用于描述单个作战节点的响应,描述单个作战节点在不同的作战事件影响下,其允许的作战状态及状态转移过程。
2 辅助反潜作战体系结构建模设计与验证
无人直升机辅助有人直升机反潜的作战流程是:舰队指挥平台派遣一架无人直升机到可疑区域,利用磁探仪等设备对敌潜艇进行精准探潜,当探测到敌潜艇的目标信息时,无人直升机将目标信息通过卫星发送给舰船指挥平台,舰船指挥平台在接收到目标信息后,通过卫星向无人直升机以及反潜直升机发送任务命令,无人直升机根据接收到的命令,组织通信预案,向反潜直升机发送目标指示信息。与此同时,反潜直升机接收到指挥平台发送的经处理过的敌潜艇指示信息,根据舰船指挥平台发送的处理后的敌潜艇指示信息以及无人直升机发送的目标指示信息,对目标实施打击。
2.1 模型的设计
本文依据无人直升机辅助有人直升机反潜作战需求,基于DoDAF 开发模型的规律,制定作战模型开发步骤。
(1)高级作战概念图OV-1
在本设计中,OV-1 是对无人直升机辅助有人直升机反潜作战的一种高层次的图形描述。它宏观地描述了辅助反潜的作战过程,便于各层次设计者之间的交流,根据作战流程的描述,在辅助反潜作战体系中,主要参与者有无人直升机、舰队指挥平台、反潜直升机、卫星、敌潜艇。其高级作战概念图如图1 所示。
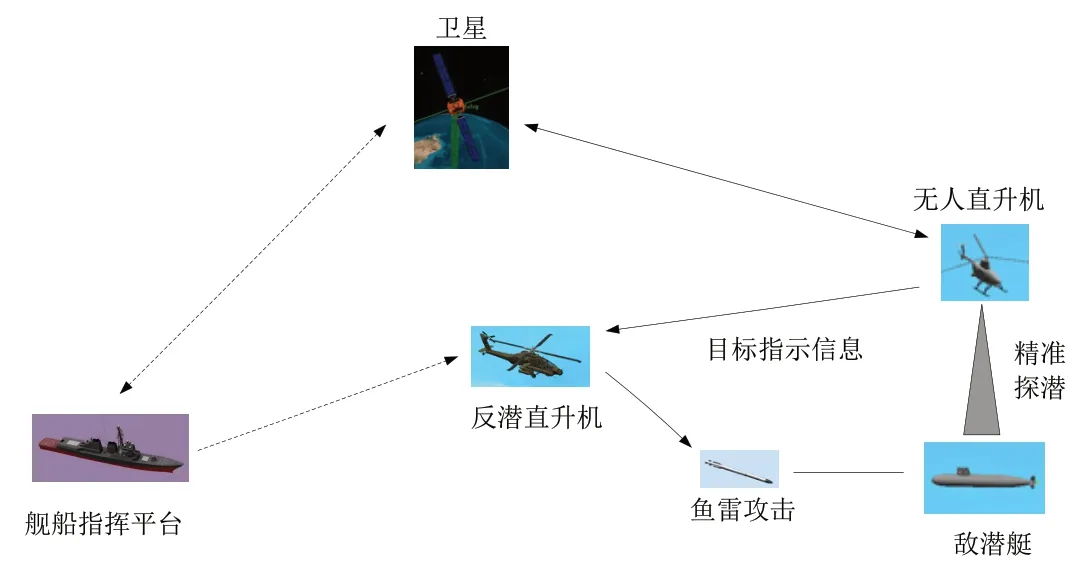
图1 OV-1高级作战概念图
(2)组织关系图OV-4
本研究场景中主要组织角色有:舰船指挥平台、卫星、反潜直升机、无人直升机等,其中舰船指挥平台是本辅助反潜场景作战活动的组织者,其他组织角色均为该平台指挥者(除敌潜艇外),故其组织角色如图2 所示。

图2 OV-4组织关系图
(3)作战活动模型OV-5
OV-5 主要研究内容为无人直升机辅助有人直升机反潜时,整个作战体系内所包含的作战要素以及作战活动之间的关系。无人机作战能力、各个作战活动之间数据流交互是它的主要内容,并且数据流的去向、作战活动的前后顺序和相互关系都是它要描述的主要内容。由本场景可知,其作战主要活动为精准探潜、作战指挥和鱼雷打击3个活动,3 个活动又可划分为探测目标、发送目标指示信息、命令决策、目标指令、火控解算、接收指令、打击7个二级子活动,由此建立的作战活动模型如图3 所示。

图3 OV-5作战活动模型
(4)作战节点连接图OV-2
根据OV-5 确定OV-2,根据本作战场景,主要作战节点含卫星节点、指挥节点和反潜节点等,作战节点间的连接关系和信息交互主要是命令指令和情报上报。OV-2 清晰地表述卫星节点、指挥节点和反潜节点之间的命令指令和情报上报信息,如图4 所示。

图4 OV-2作战节点连接图
(5)作战事件跟踪描述图OV-6c
OV-6c 定义了作战事件的跟踪描述,描述各主要作战节点在整个作战过程中信息动态的时序逻辑[6]。OV-6c 在本研究中定义了无人直升机辅助有人直升机反潜作战中各个作战节点间的信息交换活动的任务事件序列,如图5、图6 所示。

图5 作战事件跟踪描述图OV-6c(逻辑关系)

图6 OV-6c作战事件跟踪描述图(DoDAF描述)
(6)作战状态转换描述OV-6b
作战状态转换描述主要是通过图形的方法描述作战节点相应的状态变化,可把辅助探潜主要作战活动的顺序清晰地描述出来,作战场景中每个对象都对应着一个OV-6b,本研究仅列出舰载指挥中心的OV-6b,如图7 所示。

图7 舰船指挥中心作战状态转换描述OV-6b
2.2 模型的验证
将无人机辅助反潜作战体系结构模型导入DoDAF 模型验证工具进行对比验证,对比模型验证工具中流程的实际运行状态与预期的作战流程是否一致,以一致性结果的吻合度来判断无人机辅助反潜模型设计是否合理[7]。实验中将设计好的作战状态模型OV-6b 和OV-6c 导入到体系结构模型验证工具中,并定义相关消息驱动,运行后得到如图8 所示的时序图。从运行时序图看出,软件运行结果的逻辑与作战事件跟踪描述OV-6c 预期一致,符合无人直升机辅助有人直升机反潜作战系统军事需求和设计需求。
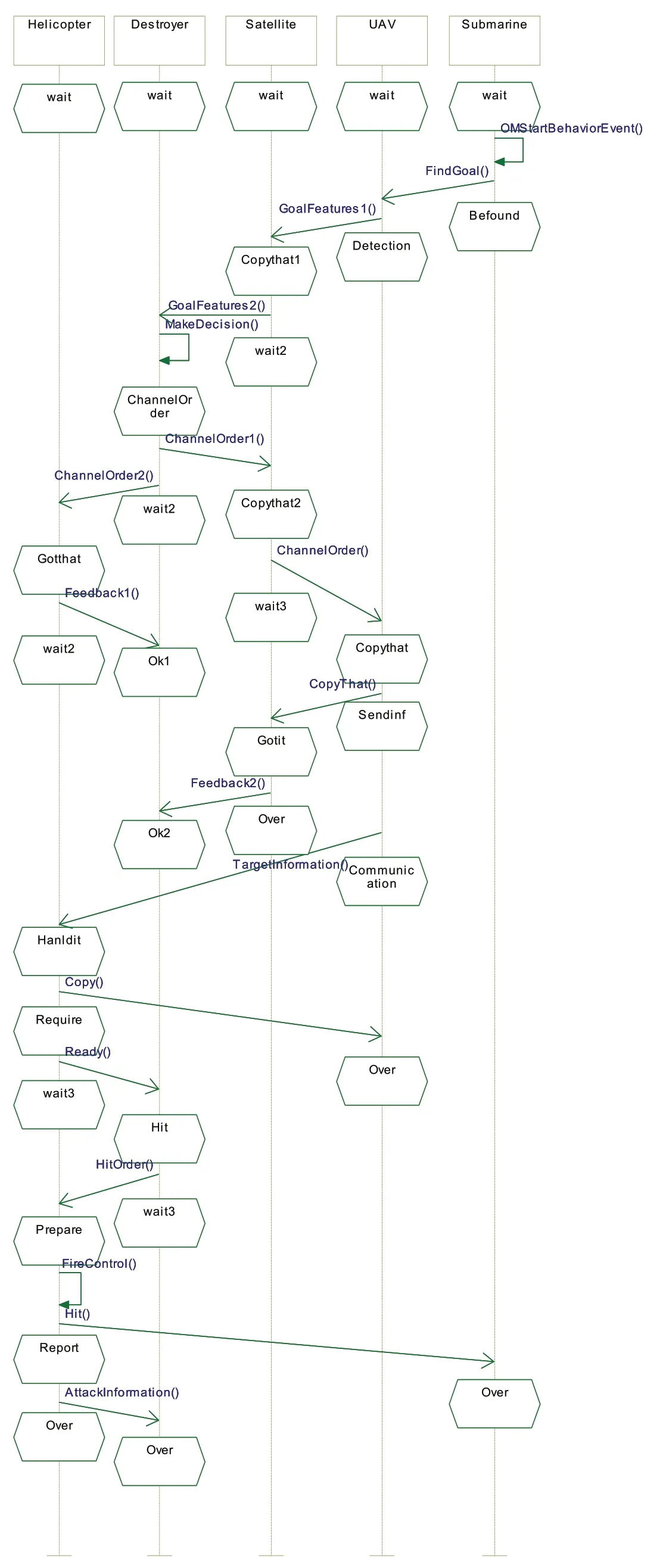
图8 运行结果时序图
3 结语
在对美国国防部体系结构框架深入研究的基础上,完成了无人直升机辅助有人直升机反潜作战系统作战视图的分析与设计,阐明了无人直升机辅助有人直升机反潜作战系统的角色、组成、活动,并进行动态仿真来验证模型,结果表明该方法合理可行。基于该方法建立的模型易于理解,有助于为无人直升机辅助反潜作战方式的流程设计和风险规避提供技术支撑,为无人直升机反潜技术的发展提供一定的参考。
