基于AM-BiLSTM模型的块石回填土区盾构姿态预测研究
2023-09-25汪来王树英潘秋景肖超
汪来,王树英, ,潘秋景,肖超
(1.中南大学 土木工程学院,湖南 长沙 410075;2.中南大学 隧地工程研究中心,湖南 长沙 410075;3.中南大学 重载铁路工程结构教育部重点实验室,湖南 长沙 410075;4.中建五局土木工程有限公司,湖南 长沙 410004)
山地城市地形起伏较大,在早期城区道路改造过程中,往往对沟谷区域采取回填处理,回填材料以城市建设中开挖土石方为主,块石含量大,由此出现较多大范围块石回填土区[1]。这些块石回填土层均匀性差、深度变化大、地层分布疏松多孔、土体变形模量低、抗剪强度较弱、遇水易发生湿陷,盾构机在穿越此类地层时,工作面稳定性差且不适合建立气压,姿态控制难度较大,容易出现姿态不良现象[1-2],导致千斤顶推力分布不均,造成管片破损、错台等问题,影响管片耐久性和安全性,同时还会造成地层损失过大从而引起较大地表沉降[1,3-5]。目前,国内对盾构姿态控制主要依靠盾构司机自身经验,在掘进过程中,盾构司机根据激光自动导向系统显示的数据,结合自身操作经验,人为调整各分区千斤顶的推力及刀盘转向等来调整盾构姿态,主观性大,控制质量难以保证,另一方面,随着盾构法向大深度、大断面、长距离发展,盾构施工对施工环境及劳动条件、施工质量提出了越来越高的要求。为了降低施工风险、解决施工经验化等问题,有必要对盾构姿态进行实时预测,根据盾构姿态预测结果及时调整掘进参数,保证盾构掘进轴线与设计轴线一致,提高盾构施工质量[6]。盾构姿态理论模型可在一定程度上揭示盾构掘进过程中的受力机制,国内外许多学者对此进行了研究。SUGIMOTO 等[7]对作用于盾构机上的荷载进行分析,建立考虑盾构姿态的力学模型,在砂性和黏性土地层的直线和曲线线形进行盾构行为模拟,将模拟结果与经验值和理论计算结果进行比较,结果表明所提出的力学模型可以很好地预测盾构姿态。沈翔等[8]基于弹性地基梁理论,建立盾构俯仰角的理论计算模型,对模型中的关键参数进行分析,结果表明:盾构竖向位移随垂直基床系数的增大逐渐趋于零,开挖面上的硬土地层高度会严重影响盾构姿态的调整。黄威等[9]提出了盾构水平姿态的二维力学分析模型,将理论计算值与现场实测数据进行对比,结果表明:提出的理论公式可以根据盾构推力大小和土体特性合理预测盾构姿态。刘成等[10]基于温克尔地基模型,提出通过改变各分区油缸推力来提供纠偏力矩的方法,推导各分区油缸推力变化量与盾构姿态之间的计算公式,建立了针对水平方向上的盾构姿态控制模型。实际施工时,盾构与周围土层相互作用机理复杂,刀盘转速、分区油缸压力、土仓压力等一系列因素会以非线性方式相互作用,影响盾构姿态;另一方面,理论模型通常需要地质参数和掘进参数,一般情况下,地质参数是在施工前通过勘察钻孔获取的,容易导致地质信息与参数不准确。因此,理论模型难以直接准确应用于盾构姿态的实时预测。近几十年来,随着计算科学的发展,机器学习(ML)方法越来越受欢迎。与理论模型相比,机器学习方法不需要大量的地质材料参数建模和工程背景经验,同时能够探索各潜在影响因素之间的复杂关系,因此被广泛应用于隧道工程相关问题的研究。丁海英[11]提出一种基于反向传播神经网络(BPNN)的盾构机姿态控制参数补偿方法,对盾构机姿态控制参数进行预测,并借助专家知识系统对推进系统姿态进行调整。张爱军[12]运用BPNN模型研究盾构掘进参数对盾构隧道轴线偏移量的影响,结果显示:盾构轴线偏移量随上下油缸推力差、盾构总推力和隧道埋深的增大而增大,随土岩掘进面占比的增大先减小后增大。ZHOU 等[13]提出一种基于小波变换(WT)、卷积神经网络(CNN)和长短时记忆网络(LSTM)的盾构姿态预测模型,利用武汉长江三阳路越江隧道盾构数据对模型进行验证,结果表明:该模型在预测精度上优于其他3种相似模型,可为盾构掘进中姿态和位置的调整提供决策支持。吴惠明等[14]利用支持向量回归(SVR)模型对盾构姿态进行预测,通过优化施工参数建立适合于盾构姿态预测的地层-施工-姿态数据库,成功对80 d内共235环的盾构姿态进行预测。胡长明等[15]提出一种基于BPNN和SVR的盾构竖向姿态组合预测模型,将其应用至成都地铁8号线某盾构区间中,研究结果表明:盾构姿态组合预测模型的泛化能力更强、准确性更高。岳琳辉等[16]提出一种基于最优组合赋权的经验模态分解-门循环神经网络(EMD-GRU)盾构竖向姿态预测方法,依托昆明地铁5号线盾构项目加以应用,并与GRU,SVR 和BPNN 的预测结果进行对比,结果表明:构建的EMD-GRU预测模型具有较高的预测精度和泛化能力。盾构姿态随掘进变化过程作为典型的时间序列问题,其模型预测性能依赖于数据在时间上的先后顺序[17],既有研究中主要采用较传统的机器学习模型,未能充分提取多元时间序列的深层特征信息,且多集中于对盾构姿态参数的预测,对于如何将盾构姿态的事前预测与现场盾构姿态调整的工程措施结合起来,目前研究较少。本文依托重庆地铁5号线北延伸段中央公园西站—椿萱大道站区间(以下简称中—椿区间)穿越块石回填土层工程实例,建立基于注意力机制的双向长短时记忆神经网络(AM-BiLSTM),对盾构姿态进行预测,结合盾构姿态调整的工程措施,提出事前预测结合事后调整的盾构姿态控制方式,研究成果可为今后类似块石回填土层盾构姿态控制提供一定的借鉴和参考。
1 理论模型
1.1 双向长短时记忆神经网络
对于时间序列数据,当前状态与先前状态具有较大的相关性,而传统人工神经网络(ANN)要求输入(输出)变量之间必须相互独立,因此,传统ANN 无法处理时间序列预测问题。循环神经网络(RNN)是ANN 的扩展,通过引入门控机制存储先前输入并利用先前输入的顺序信息,可以对时间序列中观测值的相关性进行建模,处理时间序列预测问题,然而,RNN 在时间序列数据训练过程中容易出现梯度消失问题,使得RNN 难以捕捉到时间序列数据中的长期依赖关系。长短时记忆神经网络(LSTM)具有强大的非线性拟合能力和记忆特性,是序列数据建模中使用最广泛的循环结构之一,由HOCHREITER 等[18]在RNN 的基础上提出,通过将RNN 中的隐含层替换为存储块,并引入具有记忆时间状态的自连接存储单元和用于控制信息流的自适应门单元,可以处理短期和长期时间序列内的相关性,对复杂的非线性时间序列数据进行建模,同时有效解决模型训练过程中的梯度消失问题,提高神经网络泛化性能。
LSTM 中时间序列信息的传输是单向的,为充分考虑过去和未来序列信息的时间依赖性,GRAVES 等[19]提出双向长短时记忆神经网络(BiLSTM),BiLSTM 由2个相反方向LSTM 层组成,一层按照时间序列的正向对序列特征进行编码,另一层按照时间序列的反向对序列特征进行编码,可以利用信息序列的前向和后向顺序更精确地学习信息,改善学习的长期依赖性,从而提高模型的准确性,因此特别适合处理时间序列数据[20]。
1.2 注意力机制
为了提高人工神经网络的预测性能,TREISMAN 等[21]提出了一种应用于人工神经网络的注意力机制(AM)。通过计算注意力的概率分布,从大量信息中选择关键信息,去除冗余数据,可以避免模型过拟合,提高模型的计算效率和准确性。注意力层的本质是对输入进行加权求和,其计算公式如式(1)所示:
式中:K,Q和V分别来自同一输入的不同转换,通过计算Q和K的相关矩阵,并将其与V相乘以捕捉时间序列的长距离依赖关系;dk为比例因子。
2 工程实例
2.1 工程概况
重庆轨道交通5号线北延伸段工程位于重庆市渝北区中央公园片区,现场区域周边建、构筑物多为城市道路及在建小区,轨道双线与城市道路秋成大道大致平行,地面高程299.5~310.5 m,相对高差约11 m,地形较平坦,地面坡角1°~8°,局部存在坡度大于25°的斜坡。
中—椿区间掘进长度为1 110.711 m,区间最小曲线半径2 000 m,最大纵坡38.07‰,长270 m,占比24.21%。沿线出露的地层由上而下依次可分为块石回填土层、泥质砂岩和砂岩,下穿块石回填土区间地质剖面图如图1所示。

图1 中—椿区间穿越块石回填土区段地质剖面图Fig.1 Geological profile of Zhong—Chun section crossing the soil-rock mixture backfill area
区间约401 m 位于块石回填土地层中,采用复合式TBM 进行施工,从始发至回填土段结束采用土压平衡TBM 模式,在其他地层掘进时采用单护盾TBM 模式。复合式TBM 的刀盘开挖直径为6 885 mm,主机最大外径为6 830 mm,推进系统采用30 根推进油缸,最大总推进力43 600 kN,最大行程2 300 mm,盾体带铰接,铰接油缸的作用是为了适应盾构蛇形,特别是曲线段盾构掘进,铰接型式为被动铰接,最大铰接行程150 mm。
区间块石回填土地层以素填土为主,素填土为杂色,以黏性土夹砂岩、泥岩块(碎)石为主,骨架颗粒粒径以20~600 mm 为主,局部大于1 m,含量一般为20%~45%,在厚度较大的地段中下部块(碎)石含量显著增高,局部可达到50%~60%,粒径也有所增大,局部存在架空现象,主要呈松散~稍密状,稍湿,厚度0.5~44.5 m。沿线填土堆填年限一般为1~3年。
2.2 数据分析
参考既有文献[12,15,22]中样本数据量的选择,结合块石回填土区段长度,收集盾构机掘进1环~200环的数据作为样本,每环数据包括14项参数,数据来源于重庆轨道交通5号线北延伸段中—椿区间右线17工区,由实时测量系统获取。
影响盾构姿态的因素一般可分为:隧道几何参数、地层参数和盾构机掘进参数[22]。考虑到隧道具有恒定的直径并且由相同类型的土压平衡盾构机开挖,隧道几何形状的影响可以忽略[23],因此,本文仅考虑地层参数和盾构掘进参数。参考既有文献[12-13,23-26],结合实际盾构施工经验,选取盾构姿态的主要影响因素作为输入变量,包括:盾构掘进参数(上一环盾构姿态PSA,土仓压力CP,掘进速度TV,千斤顶推力JT,刀盘扭矩CT,出土量BE)、地层参数(上覆土层厚度OT)和铰接行程(左上HDUL,右下HDLR,左下HDLL,右上HDUR)。由于上覆土层为单层,掘进过程中周围土体的内摩擦角、黏聚力等参数可认为不变,因此,输入变量中的地层参数仅考虑上覆土层厚度,该厚度可根据区间地质剖面图和盾构掘进环号对应起来。同时,分别选取表征盾构姿态的4个参数(盾首水平偏差HHD,盾首垂直偏差HVD,盾尾水平偏差THD,盾尾垂直偏差TVD)作为模型输出变量。
2.2.1 描述性统计
对收集的200环数据进行统计,各变量的统计特征如表1所示。
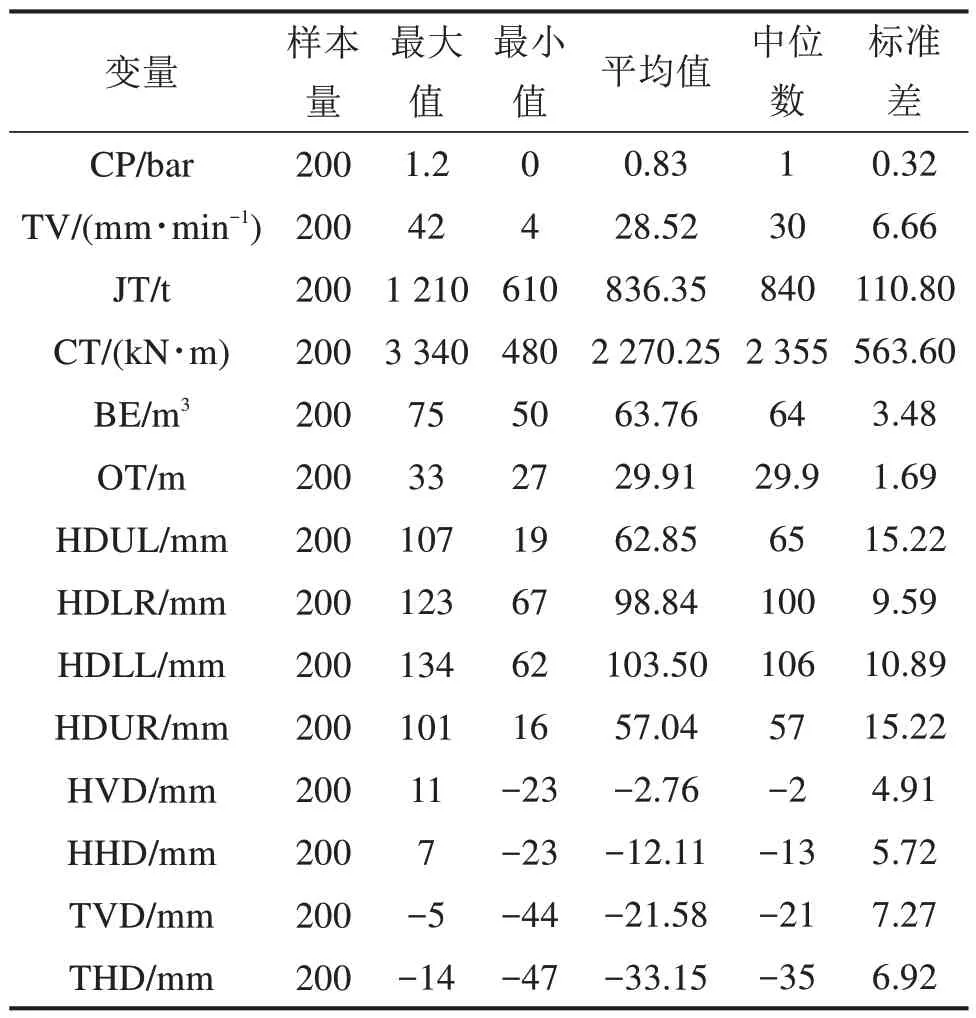
表1 数据统计特征Table 1 Statistical properties of data
2.2.2 相关性分析
对原始数据各变量间的相关性进行分析,图2为原始数据矩阵散点图(以盾首垂直偏差为例),可以看出,作为典型的时间序列问题,盾构姿态(SA)与上一环盾构姿态(PSA)相关性最高,皮尔逊相关系数为0.80,呈正相关关系,除上一环盾构姿态外,其余输入变量与盾构姿态的皮尔逊相关系数较小,线性相关性较弱,输入变量与盾构姿态之间不存在简单的线性关系,因此,传统线性回归模型不适用于盾构姿态预测,应选用对变量之间非线性相关性具有较强学习能力的机器学习模型[27]。另一方面,各输入变量之间同样存在相关性,其中,掘进速度与刀盘扭矩、千斤顶推力呈正相关关系,与工程经验一致,实际盾构掘进困难时,往往采取增大刀盘扭矩和千斤顶推力的方式提高盾构掘进速度,当刀盘扭矩过大时,可以采取降低推进油缸推力和适当降低盾构掘进速度等措施,上覆土层厚度与盾构铰接位移呈正相关关系,左上铰接行程与右上铰接行程呈正相关关系,左下铰接行程与右下铰接行程呈正相关关系,当俯仰角变化时,位于上侧或下侧的盾构铰接行程应同时增大或减小。

图2 原始数据矩阵散点图(以盾首垂直偏差为例)Fig.2 Matrix scatter of raw data (taking the vertical deviation of shield head as an example)
2.3 数据预处理
2.3.1 数据归一化
归一化数据可以加快梯度下降的收敛速度,并提高预测模型的性能,在处理非标准化数据时,梯度下降可能变得相当困难[28]。数据归一化还可以简化深度学习模型,从大量历史输出数据集中提取扩展特征,从而潜在地提高模型的性能。为权衡预测精度和训练时间,在收集大量历史数据后,使用最大-最小归一化方法将原始数据归一化至区间[0,1]。
2.3.2 异常值处理
盾构掘进过程中,由于复杂环境因素对传感器的影响,所获取的盾构姿态数据可能会与实际盾构姿态存在一定偏差,这些异常数据会影响施工人员对盾构姿态进行及时修正,从而导致盾构掘进轴线与设计轴线偏离[29]。箱形图又名盒式图,可以用来显示数据的分散情况,直观反映数据中的异常值,箱型图的方形箱体的上下代表数据的1/4和3/4 位数,即数据的一半在箱体范围内,箱型图的上下边缘代表数据的最大与最小值,箱型图上下边缘外的数据点表示数据中的异常值。图3为归一化处理后的数据箱形图,可以看出,原始数据中除上覆土层厚度外,其余数据中均存在较多异常值。

图3 盾构数据箱形图Fig.3 Box diagram of shield data
为了降低异常数据对预测模型产生的影响,提高数据分析的准确性,常常需要对异常数据进行处理[30],对于异常数据的主要处理方法为将异常数据视为缺失值进行插补,插补的方式包括均值滤波、中值滤波等。本文采用均值滤波方法对盾构姿态原始数据进行去噪,将异常值两侧数据的平均值作为异常数据的替代值。图4为去噪前后的盾构姿态参数,包括HVD,HHD,TVD 和THD,可以看出,盾构姿态原始数据存在较多噪声数据,利用均值滤波对原始数据进行去噪后,所得盾尾姿态随掘进环号变化曲线较去噪前的曲线更加光滑,盾构姿态发生突变的异常点较去噪前数据少,有利于提高机器学习模型的预测准确率。
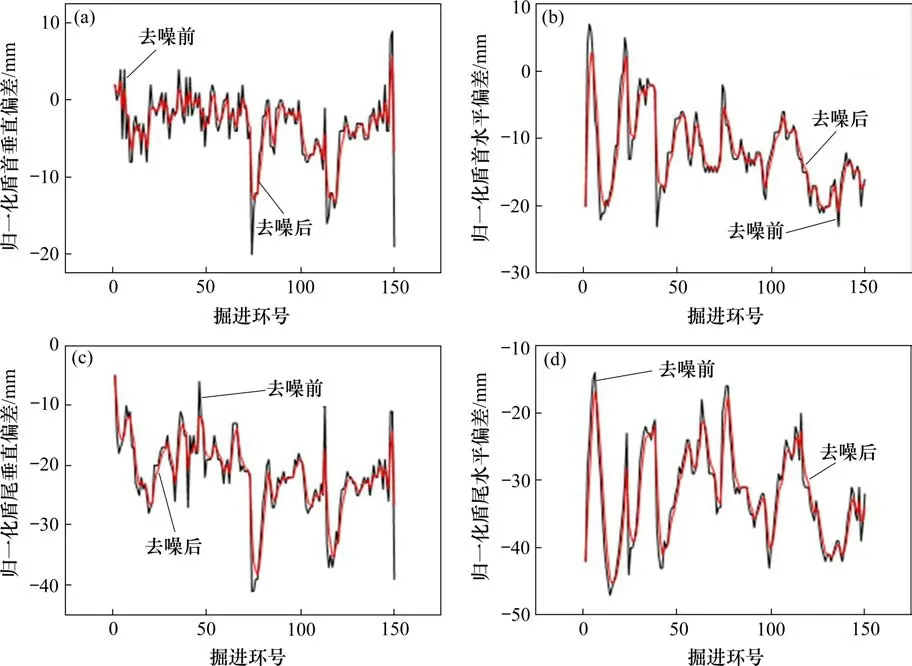
图4 去噪前后的盾构姿态参数Fig.4 Shield attitude parameters before and after denoising
2.4 模型建立
将数据集划分为训练数据集和测试数据集,根据样本集数据的总数,将75%的样本数据作为训练集(共计150 环),25%的数据作为测试集(共计50 环),其中,训练集数据用于训练AM-BiLSTM模型参数并验证模型是否过拟合,测试集用于测试AM-BiLSTM 模型的预测效果,利用训练得到的模型对测试集数据进行盾构姿态的预测,并与实际盾构姿态参数进行对比。
模型需要手动设置的参数包括:BiLSTM 层数、BiLSTM 层单元数、注意力层数、批尺寸、训练次数。其中,BiLSTM 层可以利用前向数据和后向数据,提高模型对非线性数据的拟合能力,然而,BiLSTM 层过多会导致过拟合并消耗大量时间,因此模型中BiLSTM 层数设置为2 层。BiLSTM 层单元数表示每层BiLSTM 层中的神经元数目,神经元数目过少会导致模型无法学习规律性,过多则会导致大量训练参数,降低模型训练效率,因此BiLSTM 层中的神经元数目最终设置为128个。注意力层对BiLSTM 层处理后的输出向量进行加权操作,突出更显著的输入特征,并将特征映射到样本标签空间,可以辅助模型做出更正确的决策[31]。来自BiLSTM 层的前向和后向隐藏状态均与注意力层连接以产生一个隐藏状态矩阵,该矩阵由一个128维的注意力矩阵操作,输出通过具有ReLU 激活函数的线性全连接层转化,从而产生128 维的注意力向量。小批量梯度下降将数据分成若干个批,逐批更新参数,一批数据共同决定了梯度的方向,导致下降时难以越过最优值,从而降低了随机性,通过优化,本文将批尺寸设置为32。训练次数是前向和反向传播中所有批的单次迭代,在本文中,训练次数设置为1 000。为了实现模型优化的快速收敛并获得全局最优解,选择自适应矩估计算法(Adam)对模型进行训练[32],Adam 是一种基于低阶矩自适应估计的目标函数梯度优化算法,其中,1 阶矩计算过去和当前梯度的期望,这样每次更新都不会和之前相差太大,使得过渡平滑稳定,2 阶矩计算过去和当前梯度的平方的期望值,提高了对环境的适应能力。
3 结果分析
图5为测试集上盾构姿态随掘进环号的变化曲线,由图可知,AM-BiLSTM 对盾构姿态具有良好的预测性能,其预测值与实际盾构姿态参数十分接近,对垂直偏差的预测精度大于水平偏差,除个别盾构姿态变化较大处,垂直偏差预测值与实际值的绝对误差在3.3 mm 以内,水平偏差预测值与实际值的绝对误差在4.1 mm 以内,相对于实际施工中盾构姿态控制标准均处于可接受范围之内,两者随掘进环号的变化趋势基本一致。另一方面,相较于AM-BiLSTM 模型,LSTM 对盾构姿态的预测性能较差,盾构姿态变化明显处的预测值往往偏大,模型泛化能力较差,这表明通过多层结构对数据进行前向和后向操作可以有效地挖掘数据,捕获更多的数据信息。BiLSTM 的预测精度同样小于AM-BiLSTM,对盾构姿态的预测值一般偏小,说明在BiLSTM 基础上加入注意力机制可以有效降低预测结果与真实值的偏差程度。由此可知,AMBiLSTM 相比BiLSTM 和LSTM,可更好地预测盾构姿态。
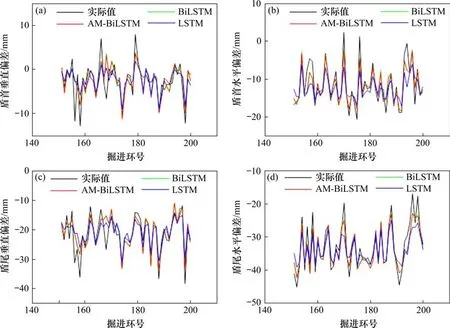
图5 盾构姿态随掘进环号变化曲线Fig.5 Variation of shield attitude with ring number
为进一步量化评估AM-BiLSTM 模型对盾构姿态的预测性能,分别计算模型在训练集及测试集上的预测性能指标,并将其与BiLSTM 和LSTM 模型进行对比。模型预测性能指标选用平均绝对误差MAE,均方根误差RMSE和决定系数R2。AMBiLSTM 模型在训练集及测试集上的预测性能指标如图6 所示,可以看出,AM-BiLSTM 模型在预测盾构姿态时具有较高的精度,在训练集上,模型对盾首垂直、水平偏差的预测准确率分别为87%和93%,对盾尾垂直、水平偏差的预测准确率分别为92%和96%,均大于85%,在测试集上,模型对盾首垂直、水平偏差的预测准确率分别为72%和86%,对盾尾垂直、水平偏差的预测准确率分别为88%和96%,均大于70%,可见AM-BiLSTM模型对盾构姿态具有良好的预测性能,能够较为准确地对块石回填土区盾构掘进过程中的姿态参数进行预测。另一方面,对于盾首垂直偏差,模型在训练集上的预测性能大于测试集,说明模型在训练过程中出现了过拟合现象,而对于其余盾构参数,模型在训练集和测试集上的表现较为一致,模型训练过程中均为出现过拟合现象。各模型在测试集上的预测性能指标如表2所示,表中分别展示了AM-BiLSTM,BiLSTM 和LSTM 对盾构姿态的预测精度,可以看出,相较于BiLSTM 和LSTM 模型,AM-BiLSTM 的平均预测结果准确率最高,BiLSTM 次之,LSTM 的预测准确率最低,进一步证实了AM-BiLSTM 盾构姿态预测模型具有较好的预测精度和模型泛化能力。
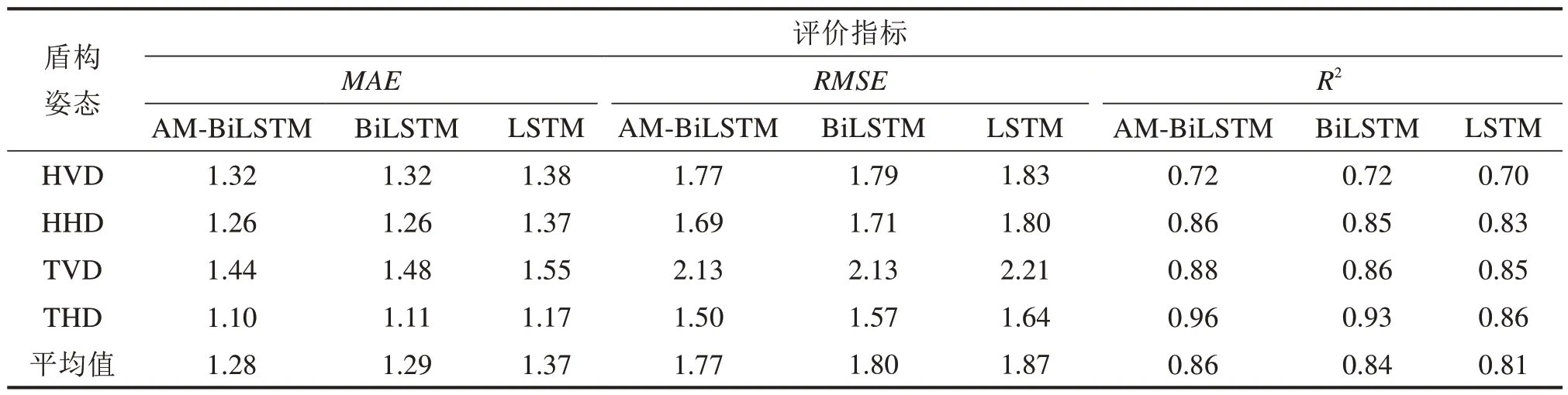
表2 不同模型的预测性能指标Table 2 Prediction performance indicators of different models
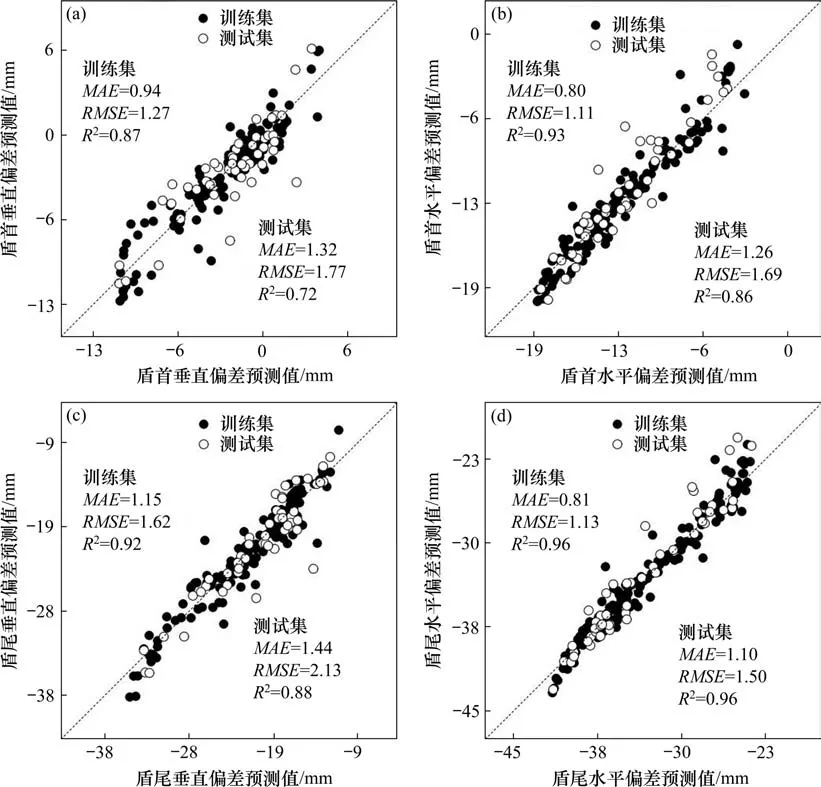
图6 AM-BiLSTM模型盾构姿态预测性能Fig.6 Prediction performance of the AM-BiLSTM model
为了研究模型在实际应用中的可行性,对每个模型的训练时间进行记录,以判断模型在实际应用中是否能够高效训练。AM-BiLSTM,BiLSTM 和LSTM 在样本集上的训练时间分别为5 min 23 s,4 min 30 s 和2 min 13 s,可见AM-BiLSTM模型的预测准确率较高,但劣势也很明显,与单向LSTM相比,它的训练时间更长,说明当用于大数据量和高维度的数据预测时,AM-BiLSTM 会牺牲部分效率来提高模型精度。
4 现场应用
实际施工过程中,将事前模型预测与事后调整结合对盾构姿态进行控制,当模型预测结果显示在接下来掘进过程中盾构姿态将发生超限时,提前采取工程措施防止盾构姿态发生超限,避免对盾构机及管片结构造成破坏。盾构穿越块石回填土区可能遭遇大块人工抛石,这些人工抛石易形成孤石区域,掘进过程中遭遇孤石会导致盾构姿态控制困难,被刀盘推向隧道侧面的孤石甚至导致盾构转向,偏离隧道轴线等。因此,对于盾构穿越块石回填土区段,当AM-BiLSTM 模型预测盾构姿态即将发生超限时,采取以下工程措施以调整盾构姿态:1) 严格监测推进油缸和盾构姿态的突然变化以及土仓压力和渣样的变化,如发现异常应结合勘察情况判断是否存在孤石并估算孤石与刀盘的位置关系,待盾构刀盘接近孤石后,采用低贯入度,增加泡沫注入量,以“小推力、高转速、低扭矩”为指导思想,使刀具对孤石的切削、冲击频率加大,靠刀盘的冲击破碎通过孤石区域[33];2) 沿盾构机中盾土仓壁拱部设置超前钻孔,向开挖面注入泡沫或膨润土,进行超前注浆,待达到指标要求后方可进行掘进,同时,在盾构机到达回填土区前,利用从地面注浆、旋喷等辅助手段对工作面进行注浆加固,改善土体均匀性,减小盾构推进时的不均匀阻力;3) 严格控制盾构的掘进速度,推进时速度应控制在35~50 mm/min,既可以避免因推力过大而引起的侧向压力的增大,又能减小盾构推进过程中对周围土体的扰动。另外,在转弯时应采取短行程多循环的方式进行掘进,为避免千斤顶推进造成管片破损,可每30~50 mm 适量收缩千斤顶,使得千斤顶对管片的应力得以释放,同时有利于盾构方向调整;4) 每环衬砌拼装完毕后,及时靠拢千斤顶,防止盾构机后退,同时,及时拧紧纵、环向螺栓,在推进下一环时,在千斤顶顶力的作用下,复紧纵向螺栓,当成环管片推出盾尾后,根据拼装后的圆环椭圆度,再次复紧纵、环向螺栓,以减少管片拼装的张角和喇叭口。
将AM-BiLSTM 模型应用到后续盾构掘进过程(201~250环)中,并与地面监测反馈信息和现场工程措施结合,对盾构掘进参数进行动态管理,以检验AM-BiLSTM 模型的现场应用效果。图7 为将AM-BiLSTM 模型事前预测与现场工程措施结合后,盾构姿态随掘进过程的变化曲线。其中,盾构掘进151~200 环过程中,采取现场工程措施对盾构姿态进行调整时,未考虑AM-BiLSTM 模型的预测值,掘进201~251环过程中,将AM-BiLSTM预测模型与现场工程措施结合,根据盾构姿态预测结果对掘进过程中的盾构姿态进行有效调整。可以看出,盾构掘进151~200 环时的盾首垂直、水平偏差平均值分别为-2.5 mm 和-11.9 mm,盾构掘进201~250 环时的盾首垂直、水平偏差平均值分别为-1.3 mm 和-7.7 mm,较掘进151~200 环时分别降低47.9%和35.8%;盾构掘进151~200环时的盾尾垂直、水平偏差平均值分别为-20.9 mm 和-33.3 mm,盾构掘进201~250 环时的盾尾垂直、水平偏差平均值分别为-19.0 mm 和-31.7 mm,较掘进151~200环时分别降低8.9%和4.8%。由此可知,将AM-BiLSTM 事前预测与事后工程措施结合,可以减小现场工程措施的滞后效应,有效降低盾构掘进过程姿态的偏差量,盾构机在穿越块石回填土层过程中,未出现较大盾构姿态偏差,安全快速地通过了块石回填土区段,表明盾构掘进参数选取合理,姿态控制良好,提出的AMBiLSTM 盾构姿态预测模型对于块石回填土区段盾构姿态控制具有一定指导意义。

图7 事前预测与事后调整结合后的盾构姿态变化曲线Fig.7 Shield attitude variation after the combination of prior prediction and subsequent adjustment
5 结论
1) 基于注意力机制,提出了盾构姿态的AMBiLSTM 预测模型,模型预测盾首垂直和水平偏差的相关系数分别为72%和85%,预测盾尾垂直和水平偏差的相关系数分别为86%和93%,均大于70%,表明AM-BiLSTM 模型对盾构姿态的预测准确率较高,可用于盾构姿态的事前预测。
2) 将AM-BiLSTM 模型预测结果与BiLSTM,LSTM 进行对比,结果显示AM-BiLSTM 的预测准确率最高,BiLSTM 次之,LSTM 的预测准确率最低,表明AM-BiLSTM 盾构姿态预测模型具有较好的预测精度和模型泛化能力。另一方面,由于加入了注意力机制和反向结构,AM-BiLSTM 模型的训练时间比BiLSTM 和LSTM 模型的训练时间长,导致训练效率较低。因此,对于大数据量和高维度的数据预测,在选择模型进行训练时,应权衡模型的预测精度和预测效率。
3) 将AM-BiLSTM 模型应用到后续盾构掘进过程中,并与现场工程措施结合,可以减小现场工程措施的滞后效应,有效降低盾构掘进过程姿态的偏差量,提出的AM-BiLSTM 盾构姿态预测模型对于块石回填土区段盾构姿态控制具有一定指导意义。
