车载振动观测方案对轨道不平顺识别效果影响研究
2023-09-25张宇轩李奇吴阅石龙
张宇轩,李奇, ,吴阅,石龙
(1.同济大学 土木工程学院,上海 200092;2.西藏农牧学院,西藏 林芝 860000;3.高速铁路轨道技术国家重点实验室,北京 100081;4.中国铁道科学研究院 研究生部,北京 100081)
随着我国轨道交通运营里程的不断增长,轨道平顺状态监测已成为保障行车安全性与舒适性的重要手段。传统的人工静态检测方法效率低、成本高、间隔长,测量结果不能反应轨下结构动态变形。基于车载振动信号的轨道不平顺动态检测方法成为重要的监测手段,其中,惯性基准法[1-3]在现代轨检车中应用最广泛。这一方法仅涉及轨道不平顺与若干运动学信号之间的简单数学关系,但由于信噪比较低[4]、对轨检车车速要求高[5]以及传感器工作环境恶劣[6-7]等不足,在实际应用中,往往需要通过拉伊达准则、EMD高通滤波[8]或小波变换[9]等方法对轨检数据进行预处理。此外,轨道检测车造价高、保有量低、监测周期长,难以满足轨道长期高密度监测的需要。为此,运营列车的监测潜力受到各国学者的重视与开发,如何构建轨道不平顺激励与列车动力响应之间的输入输出关系也成为了研究重点。车辆动力系统通常被描述为MIMO(多输入多输出)模型,理论上可根据有限的观测量实现系统状态量与输入量的估计。卡尔曼滤波算法就是一种能考虑模型参数的不确定性,根据观测量对每一时间步的系统状态和输入进行最优估计的算法。在轨道不平顺识别的相关研究中,国内外学者普遍采用了卡尔曼滤波[10]或其衍生方法。早期的研究通常将简化的车辆模型作为分析对象,如MEI 等[11]基于2 轴车辆模型,基于车体与轮对的横向加速度、摇头角速度等5个观测量,实现了对轨道不平顺、轨道曲线半径等18 个状态量的监测。TSUNASHIMA 等[12]建立了6 自由度、4 自由度简化车辆模型,由车体加速度响应识别轨道不平顺。然而,轨道不平顺对轨道动挠度的影响难以忽略[13],如需识别轨道的静态不平顺,则需要考虑这一影响,对时变的车轨系统整体进行分析。XIAO 等[14-15]建立了多跨简支梁车桥耦合模型,实现了轨道竖向静态不平顺的识别,并分析了传感器噪声、车速、系统参数等多种不确定因素对识别效果的影响。公路路面不平顺识别方面,MAKIHATA 等[16]借助无迹卡尔曼滤波算法,基于半车模型的车体振动响应识别了已知参数减速带的国际不平整指数。ZHAO 等[17-18]利用遗传算法建立了半车模型在频域内的传感器信号、车速与车辆响应之间的关系方程,并发展了利用扩增卡尔曼滤波算法识别公路路面不平顺曲线的方法[19-20]。上述轨道不平顺识别研究多基于理想化的车辆模型和观测数据开展。但在工程实践中,传感器有效工作频带有限、信噪比不一,并且平动绝对位移难以测量、转角位移测量精度较低,因此,这些方法距离实际应用尚有不小的差距。本文分析不同观测方案对轨道不平顺识别效果的影响,为传感器的优化布置及增强卡尔曼滤波识别算法的实用性提供参考。
1 车辆模型及其状态空间方程
对于常见的旅客列车车辆,可以采用如图1所示的竖向平面模型来建立轨道高低不平顺与车辆振动响应的关系。基于这一模型,根据卡尔曼滤波方法估计得到的轨道不平顺为动态不平顺,包含了轨道静态不平顺与轨下结构动态变形。

图1 竖向平面车辆模型(10自由度)Fig.1 Vertical plane vehicle model (10 degree of freedom)
这一模型考虑了车体的沉浮与点头运动、前后构架的沉浮与点头运动以及轮对沉浮,共计10个自由度。假设轮对与轨道间为线性接触,轮轨力作为系统的外力作用于车辆模型,则该模型的运动微分方程可表示为:
式中:M,C,K分别为车辆模型的质量、阻尼与刚度矩阵;z为车辆模型的位移向量;Kh为接触弹簧刚度矩阵;R为轮对行经位置的动态高低不平顺向量,它是运行时间的函数。
通过卡尔曼滤波算法对系统动力特征进行估计时,首先需要通过状态空间描述系统的动态特征,给出系统状态变量、输入量及输出量三者之间的关系。令车辆系统的状态空间向量为X=[z]T,观测量为Y=[z]T,系统输入量u=[0R]T。考虑到系统输入量为轨道不平顺,并假设其符合随机游走模型[21],根据扩增卡尔曼滤波方法[22],将状态空间向量扩增为Xa=[X u]T,整理车辆系统的状态空间方程和测量方程,并以周期T0进行离散化[23],则车辆系统的状态空间方程和测量方程可整理成如下形式:
其中:Ad为离散时间域内车辆系统的系统矩阵;Bd为系统的控制输入矩阵;Hd为系统的输出矩阵;Dd为系统的直接传递矩阵;wa与va分别为状态空间方程与测量方程中的白噪声项:
其中,Q与P分别为模型动力学参数与不平顺的噪声参数,可根据实际情况选取;R为测量方程的白噪声参数,可由传感器信号的实际白噪声水平测得。
2 基于卡尔曼滤波方法的车辆状态估计
在外荷载、观测量及动力参数均已知的情况下,理论上可根据状态空间方程与测量方程计算任意时刻的系统状态空间。然而,实测观测量总是包含一定的噪声,且系统参数存在随机性。根据扩增卡尔曼滤波算法[22],综合考虑模型参数、传感器噪声与其他干扰项的概率分布信息后,离散化车辆系统第j步状态量的最优估计a+(j)据下式计算:
式(9)~式(13)即为基于卡尔曼滤波方法的车辆系统状态最优估计计算流程(如图2所示)。

图2 车辆系统卡尔曼滤波算法流程Fig.2 Process of Kalman filter in vehicle system model
3 识别结果中漂移成分的处理
基于理想化模型与观测量的卡尔曼滤波方法的准确性已得到广泛证明[14,19]。然而,现阶段的传感器无法对车辆结构的绝对位移进行直接观测,车辆点头运动相关的运动量等也难以实现高精度的测量。这些观测量的缺失在实际的轨道不平顺识别工作中会导致漂移现象,其产生原因与加速度信号数值积分时噪声的影响有关[24]。减少漂移影响的措施有以下2种。
1) 增设位移观测量,增加模型受到的力学约束。当整车发生刚性漂移时,轨道不平顺的漂移满足下式关系:
2) 对轮对与车体的独立漂移成分进行处理。本文采用集合经验模态分解(Ensemble Empirical Mode Decompsition,EEMD)方法[25]去除动态不平顺识别结果中的漂移成分。为验证这一方法的可行性,将一轨道静态不平顺样本作用于车辆模型,计算车辆响应及轨道动态不平顺,并将车辆响应作为输入观测变量,根据卡尔曼滤波方法估计轨道动态不平顺。轨道不平顺样本通过三角级数法根据美国5级谱生成,满足随机游走模型,波长范围取0.1~100 m。样本及其差分概率密度分布图如图3所示。车辆模型参数如表1所示。
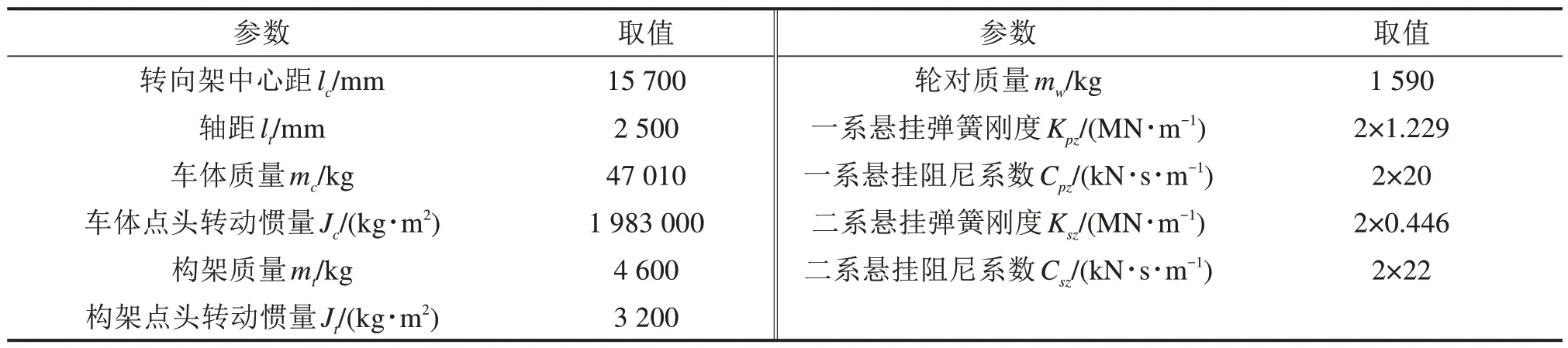
表1 10自由度独立车辆模型具体参数Table 1 Parameters of vehicle model with 10 DOF

图3 静态不平顺样本及其差分的概率密度分布Fig.3 Static track irregularity sample and probability density distribution of its difference
观测变量选择车体、转向架前后端竖向加速度、各转向架与车体的相对位移共8个观测量。动态不平顺识别及去漂移处理结果如图4 所示。可见,这一方法能够有效处理识别结果中的漂移成分。

图4 动态不平顺漂移成分处理结果Fig.4 Estimations of dynamic track irregularity after drifting eliminating
4 观测组合方案对轨道不平顺识别的影响
4.1 观测车辆加速度响应
实践中最易取得的车辆响应为车辆加速度响应。选取表2 所列3 种加速度观测组合,假定传感器信噪比为15 dB。车辆模型参数与第3 节所述一致。

表2 独立车辆模型的加速度观测方案设计Table 2 Observation scheme of vehicle model acceleration
首先仅观测车体中心处的竖向加速度(方案A1)。前后轮对的动态不平顺识别效果如图5(a)和5(b)所示。可见,动态不平顺的识别结果发生了明显的漂移,且不同轮对的识别结果未出现相对时滞。另外,动态不平顺波动随着时间出现了明显的衰减。这是由于卡尔曼滤波算法为时间更新的估计,误差协方差矩阵Mv(j)总体上会逐渐收敛[26],引起随机游走过程Rv的估计的失真。因此,该观测方案难以实际运用。

图5 动态不平顺识别结果(方案A1,A2)Fig.5 Estimations of dynamic track irregularity (Scheme A1,A2)
考虑车辆点头运动,观测车体前后端部处的竖向加速度(方案A2),识别效果如图5(c)和5(d)所示。由于观测量同样未包括2个转向架点头角的位移、速度及加速度,因此仍然无法识别动态不平顺时滞,且识别结果依然存在漂移与衰减失真。
在方案A2 的基础上,加设2 个转向架的前后端部竖向加速度观测量(方案A3),识别效果如图6所示。由图6可见,漂移现象仍然存在,且传感器布置数量与漂移量间没有明确的单调关系,可认为加速度观测量无法对位移量的漂移形成约束。但不平顺识别结果未见明显的衰减失真,经漂移成分处理后的识别结果仍有一定精度,如图7所示。

图6 动态不平顺识别结果(方案A3)Fig.6 Estimations of dynamic track irregularity (Scheme A3)

图7 动态不平顺漂移成分处理结果(方案A3)Fig.7 Estimations of dynamic track irregularity after drifting eliminating (Scheme A3)
4.2 观测车辆加速度与相对位移
选取表3 所列的3 种加速度与相对位移的观测量组合,传感器信噪比和车辆模型参数与上文一致。

表3 独立车辆模型的加速度与相对位移观测方案设计Table 3 Observation scheme of vehicle model acceleration and relative displacement
在方案A3 的基础上,新增与转向架与车体的相对位移观测量(方案A4),识别结果已在第3节得出(图4)。对比图4与图7可见,相对位移观测量能够实现长波不平顺识别的优化,但短波不平顺识别效果略差。造成这一现象的原因是由于不平顺-转向架位移间的传递函数特性[27],相对位移观测量与短波不平顺间存在矛盾。
采用与惯性基准法相同的观测量,即车体竖向加速度及其与转向架的相对位移(方案A5),漂移项处理后的不平顺识别效果如图8 所示。可见,动态不平顺的识别结果在高低频处均存在较强的噪音,这是由于这一观测思路只涉及几何量的简单叠加,不足以对独立车辆模型产生足够约束。

图8 动态不平顺漂移成分处理结果(方案 A5)Fig.8 Estimations of dynamic track irregularity after drifting eliminating (Scheme A5)
在方案A5 的基础上,在前转向架的前端增设一个竖向加速度测点(方案A6),识别结果如图9所示。可见,这一方案对不平顺长波成分的识别效果良好,总体上与真实值吻合,但短波成分的偏差仍然较大。该观测方案仅包含3个观测变量即可达成相对良好的识别效果,且观测量均为车体与转向架的状态量,传感器工作环境较好。若在工程实际中传感器设置受限,或仅关心个别轮对动态不平顺的长波成分,则该观测方案仍然存在一定的实用性。
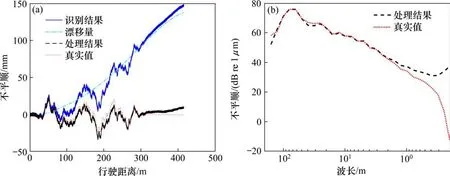
图9 动态不平顺漂移成分处理结果(方案A6)Fig.9 Estimations of dynamic track irregularity after drifting eliminating (Scheme A6)
4.3 观测车辆加速度、相对位移与绝对位移
综合A1~A6 方案可见,相对位移仅能约束识别结果中相对位移的漂移问题,而无法限制车辆整体发生绝对位移的漂移。本节考虑在方案A4 的基础上增设车体竖向、点头角绝对位移的理想观测方案。识别结果如图10 所示。从结果可见,绝对位移观测量能够完全限制车辆的刚体漂移,并且不平顺的长波部分识别效果良好,且短波识别效果劣于A3和A4方案,原因与A4方案相同。
图10 动态不平顺识别结果(方案A7)Fig.10 Estimations of dynamic track irregularity (Scheme A7)
4.4 观测组合方案评价
方案A3~A7 不平顺识别结果的各波段识别效果评价如图11所示,其中,“优”、“中”、“差”分别表示表示该波段内不平顺的1/3 倍频程与真实值相差1 dB以内、1~2 dB和2 dB以上。可见,对漂移进行处理后,A3,A4 及A6 方案均能得到可用波段范围大而连续的识别结果。且观测变量越多,识别效果越好。另外,长波不平顺的识别效果与观测变量中位移项的数量呈正相关,而短波不平顺的识别效果呈反相关。

图11 工况A4~A7各波段识别效果评价Fig.11 Evaluations of effect of scheme A4~A7 on estimation of irregularity in wave band
5 轨道不平顺识别效果影响因素分析
在实际的运营过程中,轨道不平顺的识别效果受到众多因素的影响。如载重变化、长期运营中造成的磨损等导致的车辆参数偏移、列车运行速度的变化以及传感器工作环境的变化等。本节对这些客观因素进行了模拟,分析其对轨道不平顺识别效果的影响。观测方案均选择识别效果较好的A4方案。
5.1 结构参数影响
假设车体质量,一系、二系悬挂刚度及阻尼等结构参数存在±20%的偏差,识别效果如图12所示。结果表明,车体质量偏差对识别效果影响较小,一系、二系悬挂刚度分别影响波长范围1~4 m内与10 m左右不平顺的识别效果,一系、二系悬挂阻尼分别影响波长1 m 左右与3 m 左右不平顺的识别效果。

图12 参数不同工况下各波段识别效果评价Fig.12 Evaluations of scheme with various parameters on estimation of irregularity in wave band
5.2 列车运行速度影响
考虑20,40,60 和80 km/h 4 种列车运行速度,观测结果分别如图13 所示。结果表明,车速较低时,波长范围30 m左右(简支梁跨径)的轨道不平顺识别效果较差,可认为低车速工况下简支梁的动挠度无法反应到车辆响应中;随着车速逐渐提高,长波部分识别效果未明显变化,短波部分则逐渐变差。

图13 车速不同工况下各波段识别效果评价Fig.13 Evaluations of scheme with various vehicle speeds on estimation of irregularity in wave band
5.3 传感器噪声影响
假设所有传感器信噪比相同,并对每个传感器采用不同的噪声样本,分别考虑信噪比为5,15和25 dB 3 种工况,观测结果如图14 所示。可见,较高的信噪比能够扩展识别结果的有效波长范围,而较低的信噪比会导致识别结果的明显失真。

图14 信噪比不同工况下各波段识别效果评价Fig.14 Evaluations of scheme with various SNRs on estimation of irregularity in wave band
6 结论
1) 对于具有10 个自由度的独立车辆模型,采用1~2 个车辆振动响应观测量的观测方案对车辆各自由度的约束不足,基于卡尔曼滤波进行不平顺识别将产生较大的识别误差和漂移。
2) 实际应用中基于车辆振动响应和卡尔曼滤波的不平顺识别结果一定会存在漂移成分,这是由车体绝对位移的不可观测性决定的,本文采用的集合经验模态分解方法对漂移成分具有良好的去除效果。
3) 采用3个及以上车辆振动响应观测量时,即使对车辆各自由度的约束仍然不足,但若仅关注某一轮对的部分波段的动态不平顺识别结果,则仍具有可供工程应用的准确性。
4) 在引入相对位移量作为观测量时,由于车辆传递函数特性与传感器噪声的影响,使得不平顺的长波部分识别效果有所改善,但短波成分识别效果会变差。
5) 在传感器布置合理的情况下,车辆参数的小幅度偏移不会对识别效果产生明显影响;车辆速度的变化会对识别效果产生较大影响,车速较低时,简支梁跨径大小的波段内的不平顺识别效果不佳;提升信噪比有助于扩展识别结果的有效波长范围。
