考虑执行机构故障的运载火箭自适应滑模容错控制
2023-09-22王培生屈东扬冉茂鹏董朝阳
王培生,屈东扬,冉茂鹏,董朝阳
(1. 北京航空航天大学航空科学与工程学院,北京 100191;2. 北京航空航天大学自动化科学与电气工程学院,北京 100191;3. 中关村实验室,北京 100094)
0 引 言
大型运载火箭对于空间站建设、深空探测等任务具有不可替代的作用,例如美国的土星系列运载火箭和中国的长征五号系列运载火箭等[1-2]。大型运载火箭作为一个复杂庞大的系统,其所处飞行环境恶劣多变,致使其极易发生故障,进而导致发射任务失败。控制系统作为大型运载火箭极为重要的子系统,其设计的一个重要挑战是如何在存在内部未建模动态、外部不确定性干扰及执行机构故障的情况下保证运载火箭仍具有较好的指令跟踪性能,最大程度保证任务完成[3-4]。
滑模控制因具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点,广泛应用于航空航天控制领域[5-7]。文献[8]采用自适应和滑模变结构控制设计了一种容错稳定控制器维持执行机构故障下运载火箭姿态控制系统的稳定,保证姿态跟踪误差的有限时间收敛,并结合自适应动态规划方法设计智能容错控制器进一步优化姿态控制系统的跟踪性能。文献[9]针对存在未知外部干扰和执行机构卡死故障的运载火箭,提出了一种基于非奇异终端滑模面的姿态跟踪控制算法。文献[10]引入一种有限时间扰动观测器估计扰动,并提出了一种非奇异终端反馈控制器组成的复合控制器,解决了具有外部干扰和惯性不确定性的刚性航天器系统有限时间姿态跟踪控制问题。文献[11]提出了一种新型滑模面,并结合PID的优点和传统非奇异终端滑模控制器的良好性能,增强了容错控制的鲁棒性并降低了稳态误差。文献[12]针对具有未知外部干扰的TS模糊系统,设计了一种基于扰动观测器的自适应滑模控制方法,通过对干扰估计进行补偿实现了对TS模糊系统的控制。
另一方面,在抗扰动控制中,扩张状态观测器可以估计未知干扰和系统故障,并根据观测器的输出在控制器中进行实时反馈补偿以解决控制问题,因其可以对未知非线性系统进行状态估计,对已知的系统信息要求较少,可以视为一种弱模型的方法[13-17]。文献[18]提出了一种基于扩张状态观测器的四旋翼吊挂负载摆动抑制非线性轨迹跟踪控制方法,在考虑系统存在未知外界扰动和模型动态不确定的情况下,实现了四旋翼吊挂系统轨迹跟踪的精确控制和飞行过程中负载摆动的快速抑制。文献[19]使用迭代学习与未知输入观测器相结合的鲁棒容错控制方法,实现了卫星姿态系统执行机构故障的在线重构。文献[20]研究了用滑模观测器估计时延系统状态和故障的问题,通过适当的系统变换和滤波提出了一种新的能准确估计系统状态和故障的滑模面。文献[21]针对传统扩张状态观测器在阶数过高时的高增益问题,设计了一种新型级联降阶扩张状态观测器,降低了传统扩张状态观测器的峰化现象,对系统不确定性具有更好的估计和补偿能力。
在文献[12]和文献[21]的基础上,本文针对存在内部未建模动态、外部不确定性干扰等情况时,运载火箭发生执行机构故障的问题,设计了一种基于级联降阶扩张状态观测器的自适应滑模控制器。主要创新点如下:1)在控制器设计时,同时考虑内部未建模动态、外部不确定性干扰等,以及执行器故障可能引起的系统模型变化;2)所设计的级联降阶扩张状态观测器能够对观测器状态进行饱和设置,避免因观测器峰化现象导致整个闭环系统不稳定;3)所设计的自适应控制律包含对观测器干扰估计误差的上界信息,同时,消除了控制输入的抖振现象,能够实现固定时间收敛并具有较好的指令跟踪性能。
1 系统动力学模型
1.1 运载火箭姿态控制系统模型
运载火箭的动力系统主要由4台助推发动机(S1~S4)和4台芯级发动机(C1~C4)构成,布局如图1所示的“十”字,其中黄色喷管为固定喷管,其它为摆动喷管。发动机摆动方向如图1中箭头所示,其中4台助推发动机作单向摆动,C2, C4, S2, S4摆动可提供俯仰力矩,C1, C3, S1, S3摆动可提供偏航力矩,所有发动机联合摆动可提供滚转力矩。Rs表示助推发动机到火箭中心轴线的距离;Rc表示芯级发动机到火箭中心轴线的距离。根据等效原理,运载火箭发动机等效摆角关系为
(1)
(2)

(3)
此时,运载火箭的三通道(俯仰、偏航、滚转)控制力矩可表示为
τ=Gσ
(4)
式中:σ=δc+δs表示三通道等效摆角;G∈R3×3为等效摆角与控制力矩之间的力矩转换矩阵,其具体形式如下:
G=-Tdiag(4Rs+2Rc,3(Xs-Xm),3(Xs-Xm))
(5)
式中:T表示发动机推力;Xs表示发动机喷嘴到火箭顶端的距离;Xm表示火箭质心位置。
忽略气动弹性、液体晃动等因素影响,运载火箭姿态控制系统模型可表示为[22]
(6)

(7)
ω×表示由向量ω张成的斜对称矩阵,具体形式为
(8)
令x1=θ,x2=S(θ)ω,则系统(6)可以转换为如下形式:
(9)
式中:f1(x1,x2)和f2(x1)的具体形式为
(10)
1.2 运载火箭执行机构故障模型
本文主要考虑执行机构故障中最为常见的两种故障类型:执行机构效率损失故障和偏置型故障,执行机构的故障模型可表示为如下形式[8]:
σf=Nσ+ρ
(11)

τf=Gσf
(12)
注1.本文将8台发动机的控制问题等效为俯仰、偏航和滚转的三通道控制问题,8台发动机的执行机构故障类型通过相应的转换,最终均可等效为三通道下的故障模型。因此,文中采用三通道下的故障模型进行控制器设计具有一定的合理性。同时,本文所考虑的故障问题为有限型故障,由于8台发动机的冗余性,在故障发生后,等效的三通道执行机构依然具有一定的控制能力。
1.3 运载火箭姿态跟踪系统模型

(13)

(14)

2 基于新型ESO的自适应滑模容错控制器设计
针对式(13)所示的指令跟踪误差系统的镇定问题,本文首先设计了一种级联降阶的线性扩张状态观测器,以对系统中存在的建模不确定性、外部干扰以及故障函数等进行估计;根据扩张状态观测器对系统状态以及不确定性和故障函数的估计,设计了一种可获得干扰估计误差上界信息的自适应固定时间收敛滑模控制律,以保证系统的稳定性。
2.1 扩张状态观测器设计
(15)

为证明扩张状态观测器的收敛性,下面给出几个引理和假设条件。
引理1[21].针对如下的线性时变系统
(16)

引理2[21].针对如下的受扰时变系统
(17)

假设1.系统中的状态变量e及其导数有界。
注1.对于实际的运载火箭系统,其执行机构如发动机摆角等均为连续作动器件,同时,其所受到的风干扰及结构干扰等均有界,故假设1和假设2在实际工程中是合理的。
定理1.针对指令跟踪误差系统(13)所设计的扩张状态观测器(15),若假设1和假设2满足,且系统初始状态有界,则对于任意的λ>0和T>0,总存在ε*>0,使得对于任意的ε∈(0,ε*),下式均成立
(18)

(19)
η2的动态可以描述为
(20)
式(20)符合引理2中系统(17)的形式,根据假设2中e3有界,则由引理2可知对于任意λ>0及T1∈(0,T),总存在ε1>0,使得对于任意ε∈(0,ε1)和t∈[T1, ∞),系统的解满足||η2(t)||≤λε。定理1中i=2的情况得证。
η3的动态可以描述为
(21)
(22)


(23)
此时,η3则可由下式进行计算
(24)

(25)
则可得η3=H3ψ3,因此对于任意λ>0及T2∈(T1,T),总存在ε2∈(0,ε1],使得对于任意ε∈(0,ε2)和t∈[T2, ∞),系统(21)满足||η3(t)||≤λε2。
结合η2和η3的证明结果,定理1得证。
2.2 自适应滑模容错控制器设计
为进行控制器设计,首先引入如下引理。
x(y-x)α≤l1y1+α-l2x1+α
(26)
引理4[23].对于任意x(t)∈Rn,当0
(27)
(28)
引理5[24].考虑如下的动态系统
(29)
式中:x(t)∈Rn为系统状态,f(x(t)):Rn→Rn为连续函数。若存在连续正定函数V(x):Rn→R+∪{0}使得下式成立:
(30)
式中:λ1,λ2,m1,m2和k为正实数且满足0
(31)
为保证式(13)所表示的误差系统收敛至零,设计如下的滑模面:
s=e2+ke1
(32)
式中:s=[s1,s2,s3]T∈R3,k>0,则
(33)


(34)

(35)

(36)

定理2.针对式(13)所示的运载火箭指令跟踪误差系统,在假设1~3成立的前提下,若采用式(15)所设计的扩张状态观测器及式(32)所设计的滑模面,当控制器设计为式(35)所示的滑模控制器,自适应律为式(36)时,系统会在固定时间内收敛至稳定状态。
证.选取如下的Lyapunov函数:
(37)

对式(32)求导可得:
(38)
对式(37)求导并将式(38)代入可得:
(39)


(40)
式中:μ和ϑi,i=1,2如下所示:

(41)
(42)
(43)
根据引理5,滑模变量s在固定时间可收敛到有界区域,收敛时间为
(44)
进而,通过所设计的自适应滑模控制律可使得指令跟踪误差系统在固定时间内收敛至零。
3 仿真校验
本节主要通过仿真实验对所设计的运载火箭自适应容错控制器进行验证,以证明所设计控制器在存在执行机构故障和外部不确定性干扰等情况时的有效性。

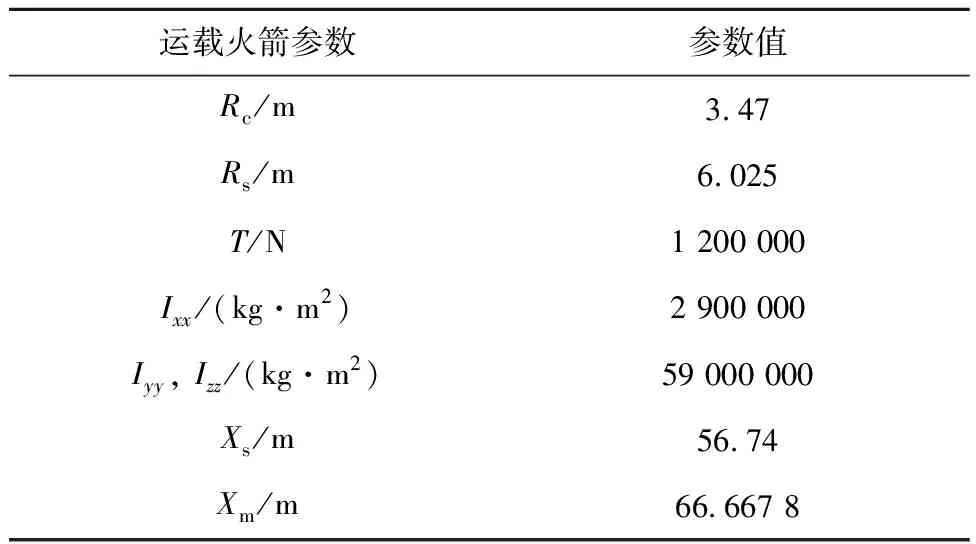
表1 运载火箭参数Table 1 Parameters of the launch vehicle
(45)

为验证所设计的自适应滑模容错控制器对执行机构不同故障情形及故障类型的有效性和优越性,考虑3种不同的故障情形,并将仿真结果与文献[9]中所设计的自适应神经网络容错控制器进行对比。
3.1 单个发动机执行机构故障
针对较为常见的单一发动机执行机构故障,考虑如下的故障类型:偏置型故障,即当t=20 s时助推发动机4发生偏置型故障,偏置量为-2°。
图2为单个发动机执行机构故障下的仿真结果。图2(a)为文献[9]所设计控制器的姿态角跟踪误差曲线;图2(b)为本文所提出控制器的姿态角跟踪误差曲线,图2(c)为相应的三通道控制输入曲线。根据发动机布局分析可知,助推发动机4发生故障主要影响滚转和俯仰通道。仿真结果显示,滚转和俯仰通道在故障发生时产生了较大的跟踪误差,相应的控制输入也产生了明显的变化,仿真结果与分析相符。同时,文献[9]及本文方法均能在20 s执行机构发生故障后保证运载火箭姿态控制系统的稳定,并实现较好的控制性能。但在故障发生后,本文所设计的自适应滑模容错控制器能够使指令跟踪误差在经过短暂的波动之后,于4 s内收敛至稳态值,且跟踪误差在0.1°以内,相比于文献[9]具有更快的收敛速度及控制精度,对指令跟踪效果较好。

图2 单发动机执行机构故障仿真结果Fig.2 Single engine actuator failure
3.2 多个发动机执行机构故障
在运载火箭执行任务过程中,除单个发动机执行机构可能发生故障外,同时可能存在多个发动机发生故障的情况。针对可能存在的多个发动机执行机构故障,考虑如下故障形式:不同时刻发生不同类型故障,即当t=20 s时助推发动机4和芯级发动机1发生偏置型故障,偏置量分别为-3°和-1°,当t=40 s时助推发动机2发生效率损失型故障,损失量为50%。仿真结果如图3所示。
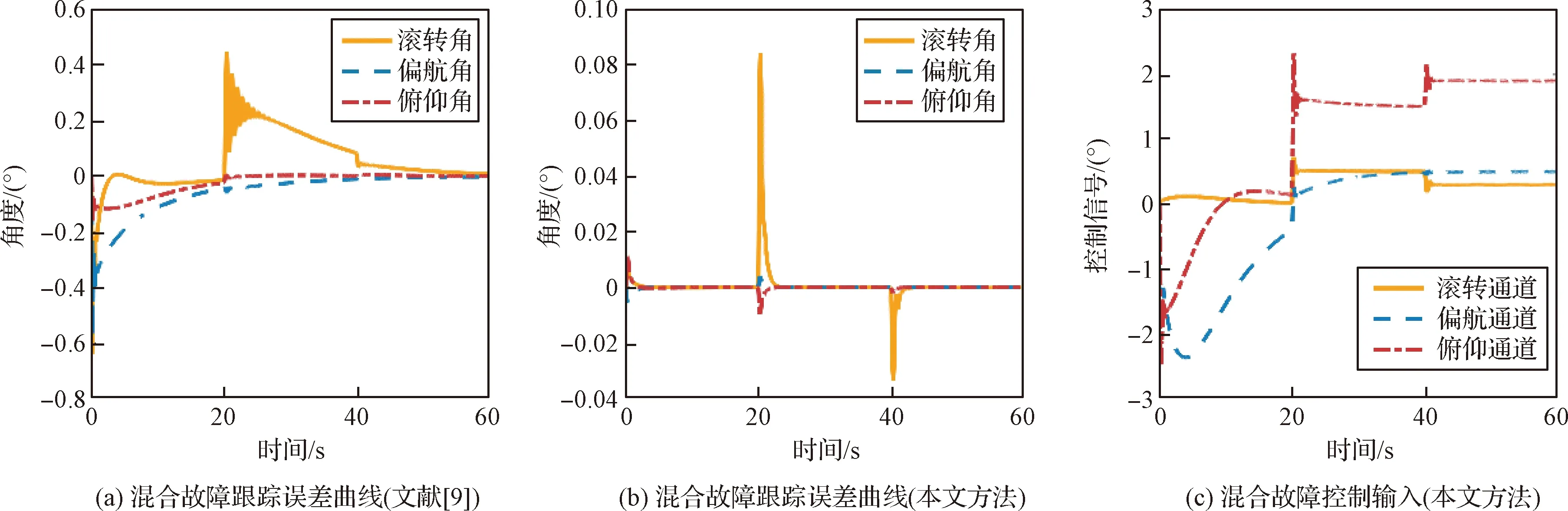
图3 多发动机执行机构故障仿真结果Fig.3 Multi-engines actuator failures
针对所述故障,根据图1所示的发动机布局形式,经过理论分析可知,发动机执行机构在20 s和40 s发生所述故障时,对运载火箭3个通道均会产生不同程度的影响,其中滚转和俯仰通道的影响相对较大。仿真结果中,如图3(c)的控制输入曲线在滚转、俯仰和偏航均具有不同程度的响应,验证了所提出控制器的有效性。
针对多个发动机执行机构故障,相比于文献[9]所提出的自适应神经网络容错控制器,本文所提出的控制器能够在5 s内收敛至稳态,且跟踪误差最大在0.1°以内,在收敛时间和跟踪误差等方面,均具有更加良好的表现,同时所设计的自适应滑模容错控制器并未出现较为明显的抖振现象,证明了所提出的控制器在多发动机故障情况下更加优异的性能。
3.3 发动机执行机构时变故障
针对发动机执行机构发生故障时,因为外部扰动、机构老化等造成的可能存在的时变故障,考虑如下的时变故障形式:当t=20 s时助推发动机3发生时变偏置型故障,偏置量为3+0.5sin(0.5t)°。仿真结果如图4所示。
图4(a)为文献[9]所设计的自适应神经网络容错控制器在发动机执行机构发生时变故障时的跟踪误差曲线。图4(b)和图4(c)为本文所提出的自适应滑模容错控制器在同样时变故障下的跟踪误差曲线及相应的控制输入曲线。
根据本文所采用的运载火箭发动机的布局形式,在发动机执行机构发生所述时变故障时,会对滚转和偏航通道产生较大的时变影响,为实现指令跟踪,达到较好的控制效果,系统俯仰和偏航通道的控制输入应产生相应的时变输入,以抵消时变故障对控制系统的影响。在仿真结果中,图4(b)显示的滚转方向更为明显的姿态误差变化,以及图4(c)显示的滚转和偏航通道相应的时变输入,进一步证明了所提出控制器的正确性。
在仿真结果中,本文所提出的自适应滑模容错控制器和文献[9]所提出的控制器均能实现指令跟踪,但文献[9]的指令跟踪误差只能维持在0.1°的范围内,且收敛时间较长。本文所提出的控制器能够在5 s内收敛到较小的稳态误差范围内,且跟踪误差维持在0.01°的范围内,在收敛时间和控制精度等方面均具有更加良好的表现。
3.4 故障大小对控制性能的影响分析
为进一步说明本文所设计控制器的性能,探究故障量级对本文所设计控制器控制性能的影响,针对单个发动机发生执行机构故障的情形,设计如下的仿真实验。
a) 考虑助推发动机4发生偏置型故障,偏置量从0°到8°逐步增加,间隔0.1°,控制器参数等其他条件保持不变,观察姿态控制系统的收敛时间及稳态误差等随发动机执行机构偏置型故障时偏置量的变化;
b) 考虑助推发动机2发生效率损失型故障,损失量从0%到100%逐渐增加,间隔1%,控制器参数等其他条件保持不变,观察姿态控制系统的收敛时间及稳态误差等随发动机执行机构效率损失量的变化。仿真结果如图5~8所示。
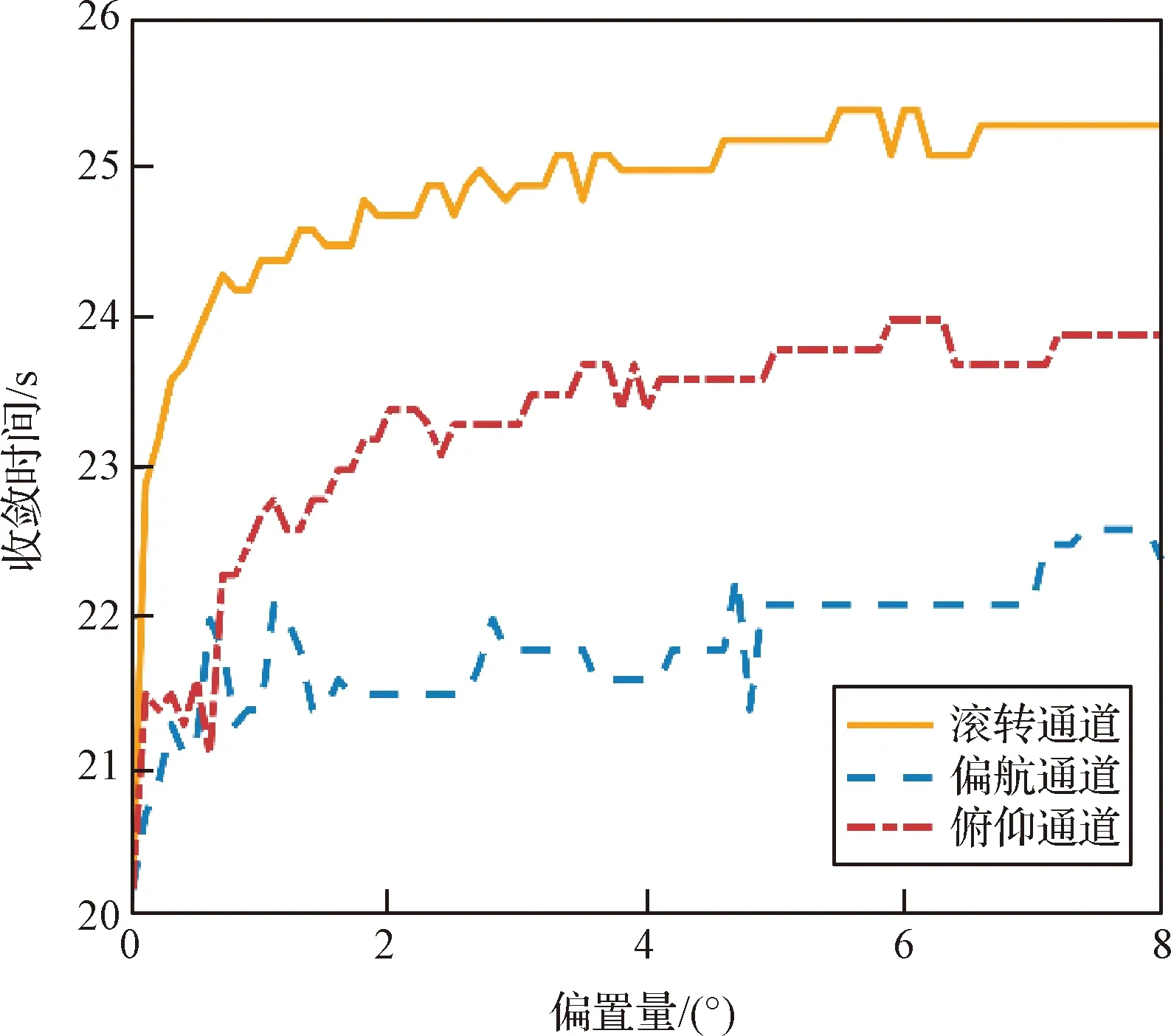
图5 偏置型故障下收敛时间变化曲线Fig.5 Convergence time under actuator failures
基于仿真结果的分析,从图5和图7可以看出,在20 s故障发生后的收敛时间与执行机构故障量级呈正相关关系,即故障量级越大,则收敛时间越长。值得注意的是,其中,滚转通道受到的影响最大,所需要的收敛时间最长,根据发动机布局分析可知,符合2号助推发动机和4号助推发动机发生故障时的实际情况。从图6和图8可以看出,随着故障量级的增加,虽收敛时间逐渐增加,但在收敛至稳态后,稳态误差并未出现较大的波动,始终保持在较小的范围内,说明所提出的控制器具有较好的跟踪控制精度,在发动机执行机构故障时表现出良好的性能。

图6 偏置型故障下稳态误差变化曲线Fig.6 Steady-state error under actuator failures
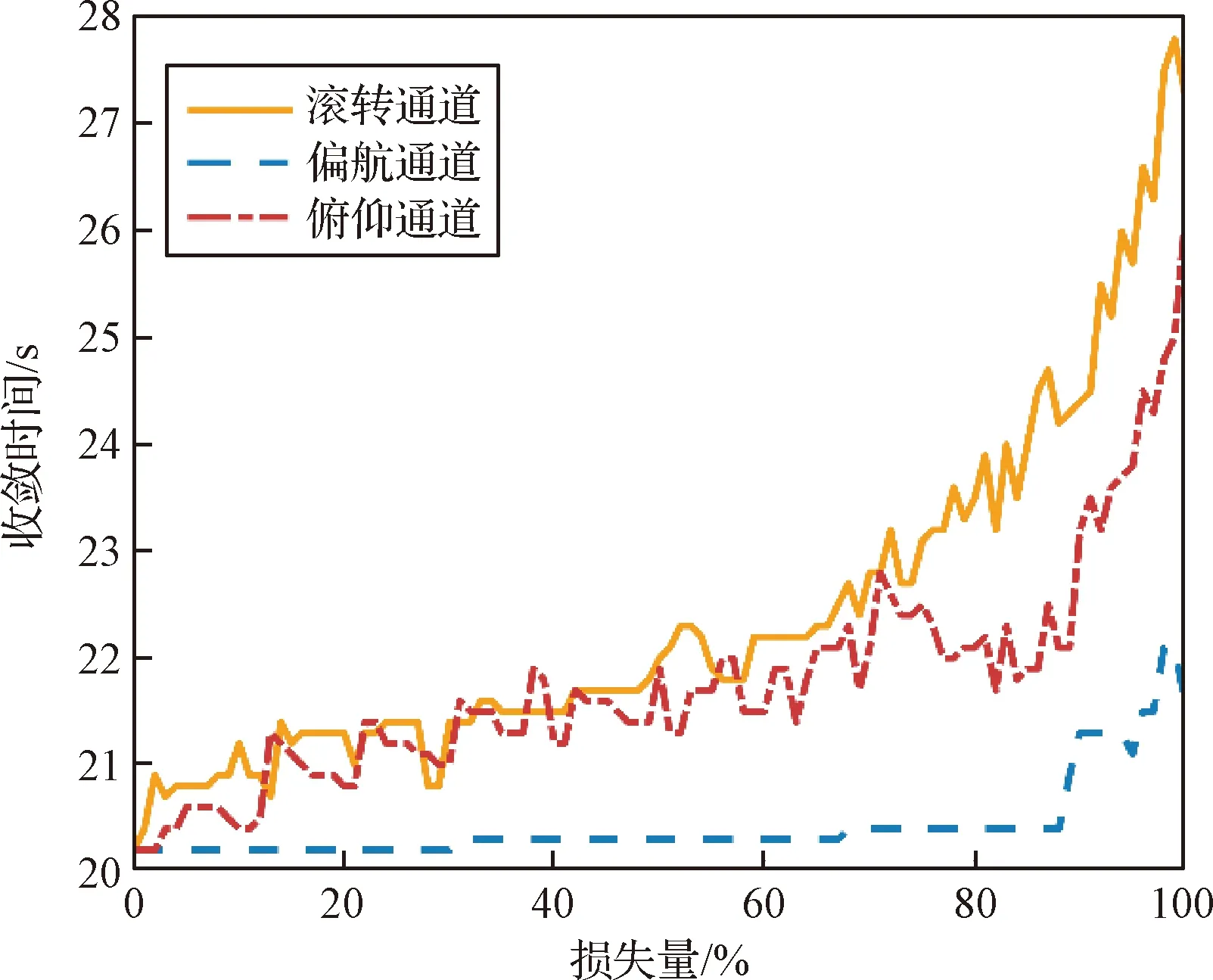
图7 效率损失故障下收敛时间变化曲线Fig.7 Convergence time under actuator failures
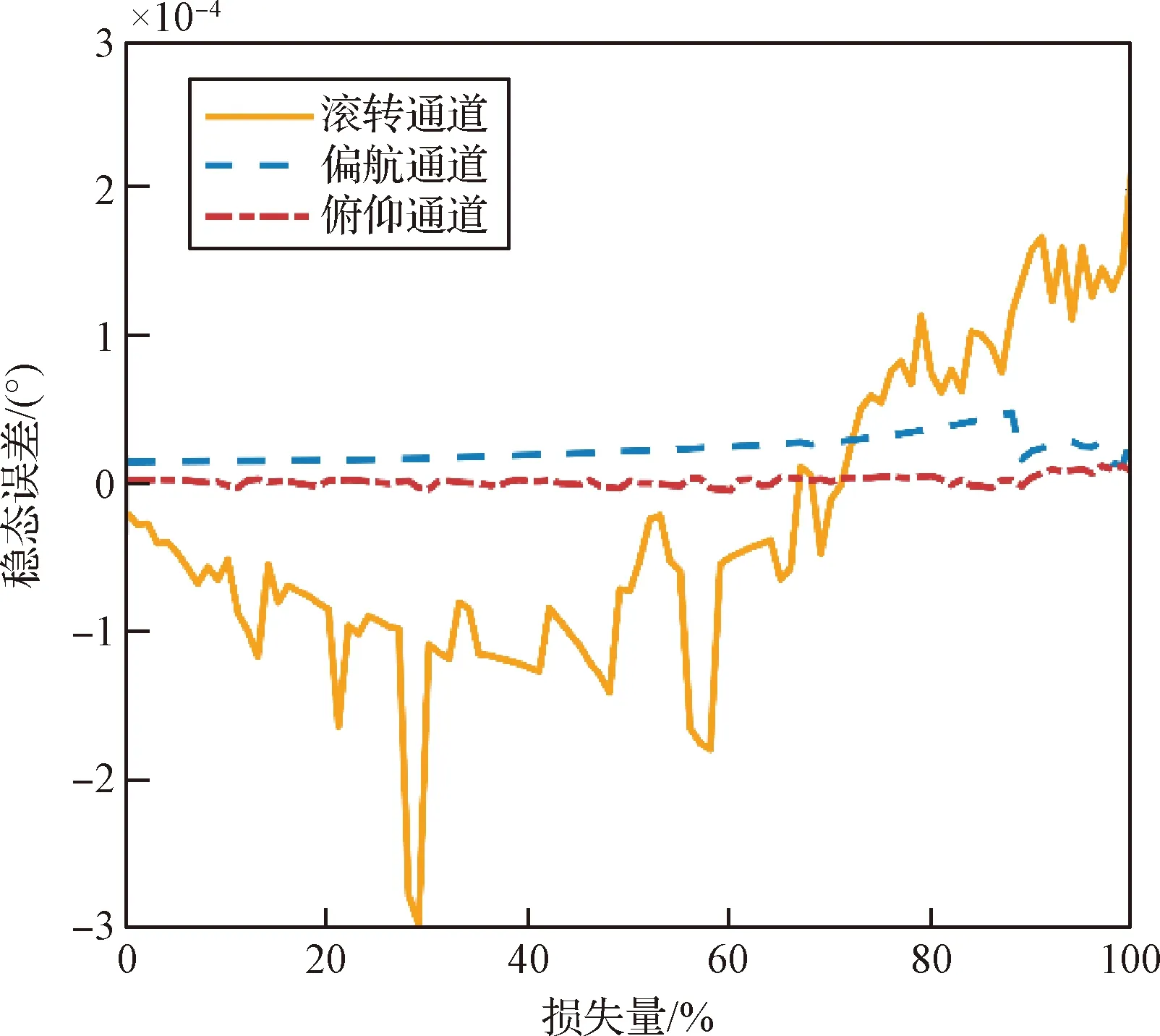
图8 效率损失故障下稳态误差变化曲线Fig.8 Steady-state error under actuator failures
4 结 论
针对执行机构故障下存在内部未建模动态、外部不确定干扰等情况时的大型运载火箭姿态控制系统,本文提出了一种基于级联降阶扩张状态观测器的自适应滑模容错控制方法。所设计的级联降阶扩张状态观测器能够对系统内部未建模动态、外部不确定干扰等进行估计,自适应滑模控制律能够获得观测器干扰估计误差的上界信息并对其进行补偿。此外,该控制器所得到的控制输入能够消除滑模控制中的抖振现象,具有较高的实用价值。仿真结果验证了所设计控制器对执行机构故障的有效性及较好的指令跟踪性能。后续将进一步考虑存在噪声及执行机构速率限制下执行机构故障的姿态控制系统高精度跟踪控制和控制分配问题。