旋翼桨叶挥舞形变参数化建模三维仿真分析
2023-09-20黄昱钦欧巧凤熊邦书陈垚锋
黄昱钦,欧巧凤,熊邦书,陈垚锋
(1. 南昌航空大学图像处理与模式识别江西省重点实验室,江西 南昌 330063;2. 中国直升机设计研究所直升机旋翼动力学重点实验室,江西 景德镇333000)
1 引言
直升机是一种以发动机驱动旋翼旋转提供升力的航空飞行器,其旋翼桨叶在高速旋转运动过程中会产生复杂的挥舞[1]、摆振[2]和扭转[3]运动。因此对桨叶运动进行参数化建模[4-5]以及三维仿真[6-10],重现其在高速旋转过程中的桨叶运动,为直升机的旋翼系统的设计及试验验证提供了强力有效辅助分析。
挥舞量一直是桨叶运动重要的参数之一。目前大多采用立体视觉测量方法[11-15]对桨叶的挥舞量进行测量,文献[1]中提出了一种大视场下立体视觉测量方法,并取得了良好的测量效果,但其仅能测量出有限位置下的三维信息数据,仍存在不连续、不平滑、不直观的问题。
桨叶的挥舞是由桨叶作为实体来进行承载,对桨叶进行参数化建模,就是将桨叶作为挥舞特性三维分析对象。对桨叶结构进行拆分细化,再确定由旋翼旋转与桨叶挥舞产生的桨叶特性变化,作为拆分后各个部件独立的参数输入,可以准确的反映出桨叶在运动过程中的挥舞变化,也可根据试验参数的调整,快速重新构建桨叶模型。
针对上述需求,本文基于大视场高精度立体视觉系统采集到的桨叶数据,提出了对直升机桨叶进行参数化建模进行三维运动仿真可视化分析方法。
2 数据解算
数据解算过程如下:首先,获取桨叶运动时采集到的标记点的三维坐标数据;然后解算出桨叶运动挥舞量数据;最后对挥舞量数据进行三次样条插值[16-18]得到完整的仿真数据。
2.1 挥舞量计算
以有铰桨叶为计算对象,对直升机桨叶挥舞量的全场景视觉测量结果进行分析可知桨叶每个时刻每个标记点三维坐标数据,并通过三维坐标数据计算得出桨叶挥舞量。


图1 桨叶挥舞运动示意图
(1)
2.2 数据插值
由于直升机桨叶在高速旋转运动过程中产生的形变都是连续且光滑的空间曲面,故选择三次样条插值函数进行逐段拟合,能够保证每个小区间上插值曲线和整个桨叶表面曲线的光滑性。
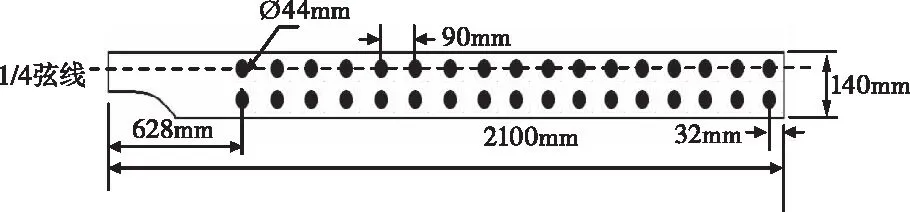
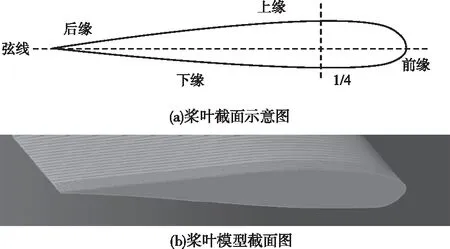
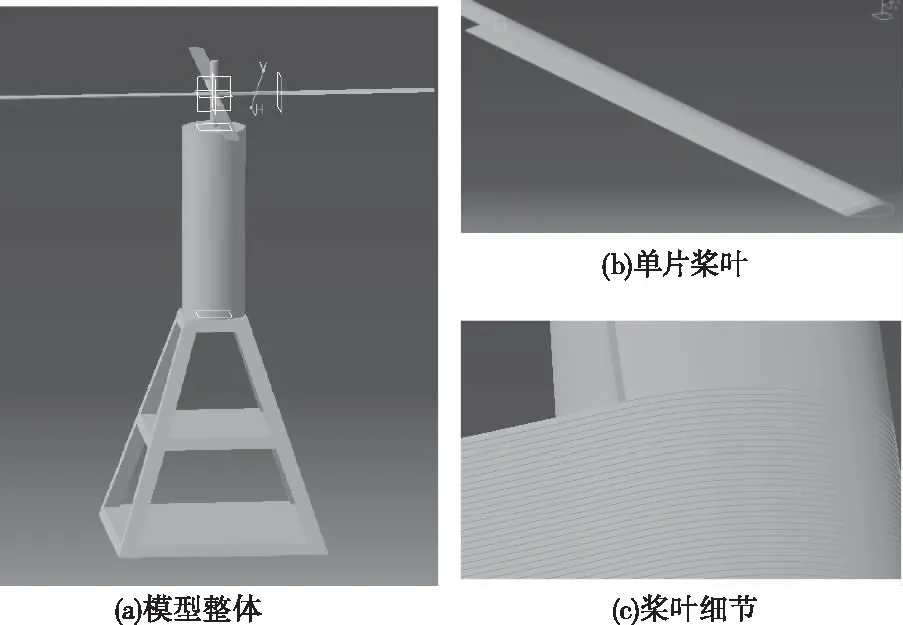
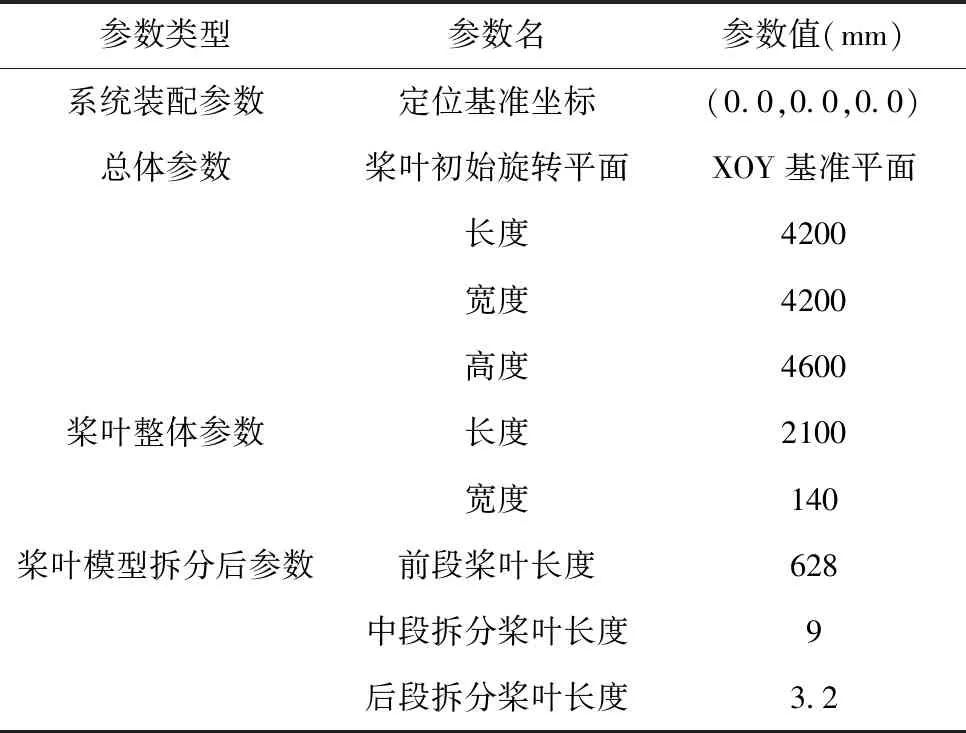
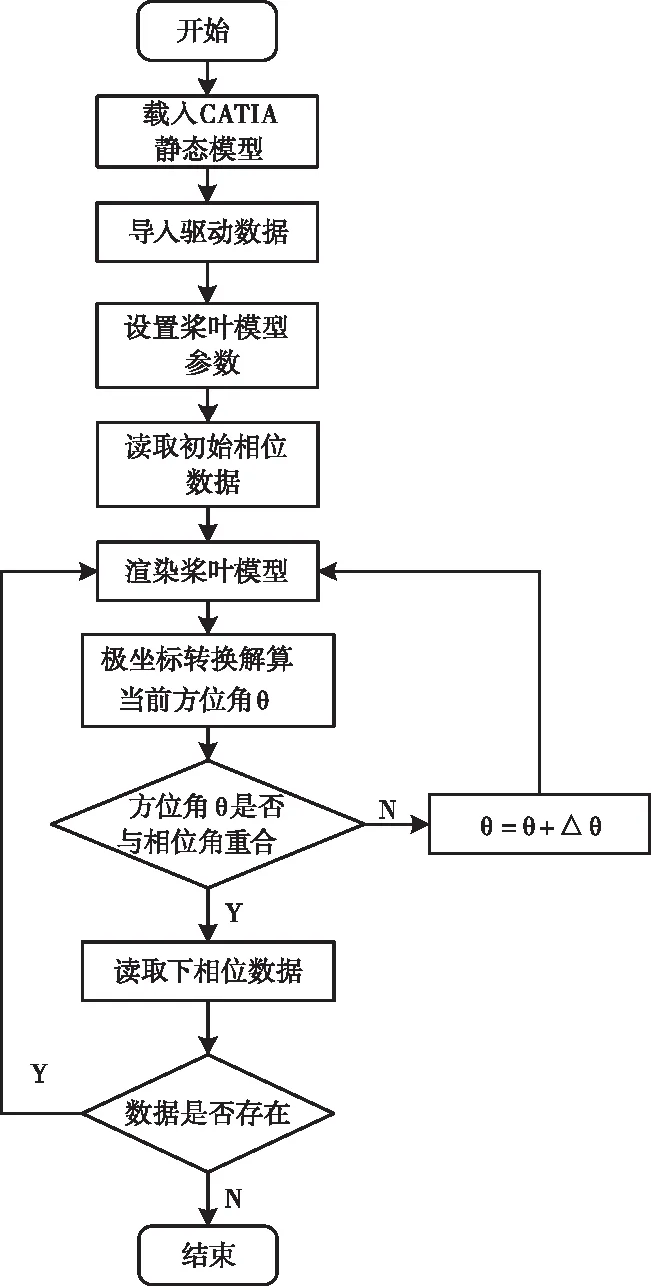
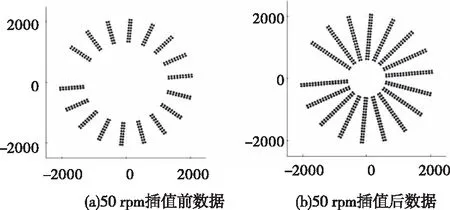
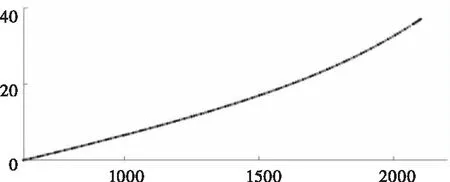
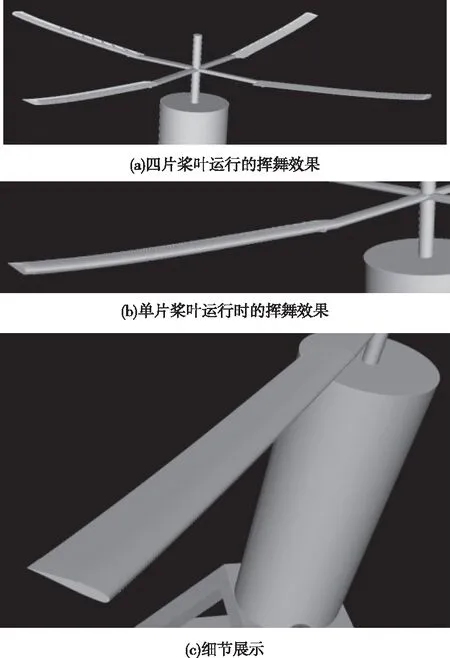
桨叶上粘贴N个标记点,采集一周M个方位的数据,一共采集K周。根据三次样条函数的定义,以及桨叶上所粘贴标记点的位置,可以在桨叶旋转半径区间[a,b]进行划分:a=x0 S(xi)=yi,i=0,1,2,…,n (2) 并且满足一定的边界条件,那么S(x)就是f(x)的三次样条插值函数,其中x0,x1,…,xi-1,xi为样条节点,x1,…,xi-1为内节点,x0,xi为边界节点。 (3) 将式(3)积分两次,得 (4) 利用插值条件S(xi-1)=yi-1,S(xi)=yi,确定积分常数C1,C2,然后带入式(3)中并整理,得到S(x)在区间[xi-1,xi]上得表达式为 (5) 由已知自然边界条件 可得如下方程组 (6) 其中 (7) 解上述方程组,求得Mi(i=0,1,2,…,n),代入S(x),即可求得每个子区间[xi-1,xi](i=0,1,2,…,n)上得三次样条函数。再根据不同相位上的数据进行多次拟合插值,可得出不同圈数下不同相位上的三次样条函数,最终将所需要的运动半径x的值,代入到S(x)中,即可获得所有位置下桨叶挥舞量的插值数据y,并以此作为桨叶挥舞的驱动数据。 在进行桨叶运动参数测量的过程中,在桨叶下表面粘贴圆形标记点,分布如图2所示,桨叶的总长度为 2100mm,宽140mm,共有34个标记点。 图2 圆形标记点在桨叶上的分布示意图 图3 模型坐标示意图 在数据解算过程中,使用了三次样条插值拟合17排标记点的数据。 为了保障模型的精度以及平滑度,对相邻2个标记点间进行分割,除去桨根部分,将其余部分均匀分为10块。即每一根桨叶模型都由171个零件拼装而成。 以桨毂中心为坐标原点建立坐标系,以桨叶在50 rpm(每分钟转速)低速旋转时处于拉平状态下的旋转平面为XOY平面。 桨叶截面图4(a)所示,并由此来确定CATIA中模型桨叶形状,创建完成后桨叶模型截面如图4(b)所示。 图4 桨叶截面图 图5 全尺寸桨叶模型 根据上图所示在CATIA中完成全尺寸桨叶模型的几何建模,由于桨叶运动试验在旋翼塔上进行,所以在建立模型时,以旋翼塔为底座,并进行简化,减少由于模型复杂而导致最终实时渲染时间过长引起的卡顿问题。 在CATIA中桨叶建模的相关参数如表1所示。 表1 建模参数 运动模型建立总体流程如图6所示,首先,将CATIA中建立好的桨叶模型导入到Simulink中,并修改相关参数使其能够正确使用;其次,导入标定点的坐标信息,在数据解算模块中解算出所需要的桨叶挥舞量数据和位置信息;最后,确定桨叶旋转速度,并将桨叶挥舞量数据和位置信息输出至桨叶模型中。 图6 运动模型建立流程图 根据直升机桨叶运动的物理规律,本文在对旋翼桨叶进行建模过程中,主要基于以下假设条件 1)旋翼桨叶不可拉伸; 2)旋翼桨叶在较小长度下视为刚性结构; 3)4片旋翼桨叶各个部分关于桨毂中心O完全对称; 在此假设条件下,桨叶在XOY平面的旋转运动可以视为为圆周运动,将平面直角坐标系转换成极坐标系下对单个桨叶进行分析。 设桨叶在初始状态与极坐标轴夹角为θ,距离坐标轴原点的距离为l,运行时间为t(s),旋翼转速为w(rpm)。当旋翼稳定旋转时,即转速稳定时,θ与t呈线性关系,可得方程(其中a为倍率变量) (8) 在t时刻时,将t带入式(8)中,计算可得出当前桨叶旋转角度θ,当θ角与相位角重合时,根据不同长度l下的插值拟合数据,载入当前位置的挥舞量,并代入当前θ和l的位置数据,通过极坐标与平面坐标变换公式,计算出在平面XOY下此时位置相比于初始位置的x,y的偏移数据,最后将不同位置下的x,y偏移数据以及挥舞量数据,载入桨叶模型中,模型参数输入数据如表2所示。 表2 模型输入参数 根据上述过程,在Simulink中建立运动模型,图7给出了仿真模型在Simulink下实现的简化图,总体上可分为4个部分。 1)旋转角度计算模块:输入旋翼转速w与慢放倍数a,计算得出桨叶旋转角度θ,输出至桨叶整体运动模块。 2)桨叶整体运动模块:接收旋转角度θ后,计算并输出旋转与偏移参数至VRSink实时演示模块。 3)数据载入模块:载入挥舞量数据,计算出每个桨叶部件的挥舞量,并调整数据输出接口与VRSink实时演示模块相匹配。 4)VRSink实时演示模块:在VRSink中预先载入CATIA中建立的模型,并设置对应模块的参数接口,接收桨叶整体运动与数据载入模块数据,最终通过相应参数在VRSink中将桨叶模型驱动。 本文使用数据来源为某设计研究所开展的直升机悬停飞行状态下,桨叶挥舞量测量实验采集的数据,环境如图8所示。 图8 实验现场 由于某些原因,致使在数据的采集过程中出现标记点无法贴满或在某些相位角上无法采集数据的问题,为了保证本实验的完整进行,须对缺失数据进行补足。 当旋翼在50rpm低速旋转时,使用大视场立体视觉系统[1]采集到的数据,如图9(c)所示,通过计算可以得出,此时桨叶近似于拉平状态,在拉平状态下的桨叶可以被视为没有发生形变,故使用最小二乘法对现有数据进行进一步补全,计算得出缺少标记点的数据。补全前的50rpm处理后数据如图9(a)和图9(c)所示,补全后的数据如图9(b)和图9(d)所示。 图9 50rpm下数据补足前后对比 本文提出的桨叶挥舞形变三维仿真方法,主要使用数据为旋翼在不同总距下,转速为750rpm时稳定运行100圈的坐标数据。图10(a)和图10(c)为在旋翼总距为2°,转速750rpm,采集100周的数据。 图10 750rpm下数据补足前后对比 由于某些原因,此次试验仅有12个相位的数据,为了保证桨叶运动的完整性,需对缺失数据进行补足。 由于桨叶为圆周运动,因此使用最小二乘圆拟合得出每旋转一圈下各个标记点的圆拟合公式,再将其转化为极坐标下方程,由于已知相位角间隔为20°,通过现有标记点位置,即可计算得出缺失相位角上标记点x,y坐标信息。 由文献[1]可知桨叶挥舞规律与总距关系,并根据已有数据将缺失数据补充完整。图10(b)和图10(d)为补全后的数据。 已知桨叶上粘贴17排标记点,在计算后获取的每片桨叶的数据不够充足且不够平滑。因此,对已有数据进行10倍插值,插值结果如图11所示。 图11 插值后数据 在Simulink中将处理完毕后的各组数据输出至模型中的相应模块上,完成数据的匹配和载入,使得桨叶模型可以放慢倍数按照设定转速和模块参数运行,运行效果如图12所示。 图12 桨叶模型实时运行效果 为了尽可能准确的在虚拟环境中重现直升机桨叶的挥舞状态,并使相关试验人员更好的观测和进一步分析桨叶状态,本文在模型运行中着重以下几个方面: 1)观测点位 在模型运行过程中,可以对观测点位进行设置与移动。通过在虚拟空间中调整不同方位、不同视角的观测点位(斜视点位、正视点位、俯视点位和侧视点位),可以全方位的展示出模型的整体运行效果。也可通过控制观测点位的移动,对模型局部进行观测。这可以使得试验人员获取到足够的视觉信息,从多个角度下观测桨叶的挥舞状态。 2)倍速慢放 由于固定旋转速度不便于观测,为了达到理想的观测效果,通过调整慢放倍数可以实现对于设定旋转速率的调整。试验人员可以自行调整慢放速度,范围从每秒旋转1°的超慢速到每秒旋转4500°(即750rpm)可调。可以从微观和宏观上对桨叶的挥舞变化进行全面的观测。 3)动态表现效果 由于本文设计的模型在运行时是动态旋转的,所以模型的实时运行效果,也是至关重要的。该模型在运行时,从可调大慢放倍速至原速的动态表现良好,画面流畅细腻,无卡顿现象。 对桨叶挥舞运动进行仿真实验中所使用的实验数据,如表3所示。在不同的实验数据下,整体模块运行效果好,鲁棒性高。 本文通过CATIA进行轻量化参数化建模,对直升机桨叶在高速运动下的桨叶挥舞量进行仿真建模分析,提出了在三维场景下对桨叶挥舞状态的三维动态仿真方法;提出对桨叶挥舞量数据进行插值的方法,并通过数据预先载入,使得仿真模型具有精度高,渲染速度快的优点。 本文通过使用试验采集数据,可以准确的复现出直升机桨叶在试验过程中不同状态下的挥舞变化,为旋翼系统设计与试验分析提供强力有效辅助手段。





3 模型的建立与驱动
3.1 桨叶模型的建立

3.2 桨叶运动模型的建立


4 实验与结果分析
4.1 初始数据准备


4.2 数据插值
4.3 模型实时运行效果
5 总结
