基于温度变化的Ka频段遥感卫星跟踪相位快速修正方法
2023-09-19吴威葳
吴威葳
(中国电子科技集团公司第十研究所,四川 成都 610036)
0 引 言
随着Ka频段低轨遥感卫星的应用,国家开始逐步建设Ka频段遥感卫星接收地面站[1]。Ka频段遥感卫星地面站面临许多新的挑战,Ka频段卫星的稳定跟踪便是其一。某工程建设12 m S/X/Ka三频天线接收系统,Ka频段跟踪接收机借鉴和继承已被工程实践充分证明的方案和技术,采用双通道单脉冲技术进行角跟踪。此跟踪体制中,相位值的准确性是稳定跟踪的前提。该工程交付后,在季节变换、温度变化较大时,地面站反馈跟踪不稳甚至出现跟踪失败情况,影响了卫星数据的接收。经过分析,Ka频段角跟踪与以往X频段和S频段角跟踪相比波长更短,相位值随温度的变化更加敏感。温度变化较大时,往往会出现和差两路信号相位变化不一致,出现相位差,导致跟踪不稳,甚至跟踪失败。由于天线所在场地无满足远场条件的标校塔(Ka频段远场距离约为24.6 km),Ka频段往往采用对星重新校相[2],而Ka频段卫星下发信号时间极短,对星校相时间不足,容易导致任务失败。
针对该问题,本文结合该工程12 m S/X/Ka三频天线接收系统,利用温箱模拟环境温度变化,对相关工程设备进行温度试验,找出相位随温度变化的特性,并提出温度变化时无须对星的快速修正相位值的方法。
1 温度变化对Ka跟踪的影响
1.1 跟踪流程
该工程三频天线Ka频段的跟踪流程如图1所示。天线馈源送出和、差两路Ka频段信号,经Ka频段低噪放大器放大后,通过Ka/X双通道下变频器变频为X频段信号,由光传输设备传送至双通道下变频器进行变频,变频到70 MHz后,将和、差两路70 MHz信号同时送入跟踪接收机,进行角误差信号的提取。提取出的误差信号送天线控制单元(Antenna Control Unit,ACU)控制天线进行角跟踪。

图1 某工程12 m S/X/Ka三频天线Ka频段跟踪流程框图
1.2 跟踪原理
天线TE11、TE21多模馈源产生和信号E∑和差信号E△,经过跟踪接收机A/D采样后,采用和信号的AGC为基准将差路信号幅度进行归一化,然后与和路参考信号进行鉴相,检测出方位误差电压U△A和俯仰误差电压U△E,鉴相的和路参考信号为移相后的和路输出信号,如图2所示。

图2 角误差解调原理框图
假设从天馈来的信号为单频信号,在馈源端口输出和信号的瞬时值为
差信号由方位与俯仰差信号相位正交合成得到,为
式中:ϕ为和、差信号的相对相位差,μ为天线的相对角误差斜率,θ为目标与天线电轴的夹角。
式中:θA、θE分别为方位偏差角和俯仰偏差角。
和差信号经过下变频后,将信号变换后得到差路信号为
和路信号为
式中:Δϕ=ϕ∑-ϕΔ,表示和、差两路的相位不一致性。
和路信号通过与参考信号相干后输出的信号为cos(ω0t+Δϕ),它与差路信号UΔ相乘经低通滤波后的输出为
式(6)第一项为方位误差输出信号。该信号转换成方位误差电压送ACU控制天线进行方位角跟踪。当有Δϕ时,即和、差两路的相位不一致时,该公式存在第二项,其大小与俯仰偏差角有关。此时,方位误差信号中便包含了俯仰误差信号,即形成了俯仰对方位的交叉耦合,会使天线跟踪目标时产生螺旋形跟踪,使收敛速度慢、动态跟踪性能变差,甚至跟踪失败。
式(7)第一项为俯仰误差输出信号。该信号转换成俯仰误差电压送ACU控制天线进行俯仰角跟踪。当有Δϕ时,即和、差两路的相位不一致时,该公式存在第二项,其大小与方位偏差角有关。此时,俯仰误差信号中便包含了方位误差信号,即形成了方位对俯仰的交叉耦合,这会使天线跟踪目标时产生螺旋形跟踪,使收敛速度慢、动态跟踪性能变差,甚至跟踪失败。
通过以上原理分析和图2可以看出,和、差两路信号经过不同接收通道,经过的电长度不一致,系统必然存在和、差相移不一致的情况。此时提取的方位角误差信号会包含俯仰角误差信号,即形成了俯仰对方位的交叉耦合。俯仰角误差信号中会包含方位角误差信号,即形成了方位对俯仰的交叉耦合。因此,在角跟踪前,必须通过校准相位值,分别填入方位可调移相器和俯仰可调移相器中,才能消除和、差信道的相移不一致性。然而,填入的方位移相值和俯仰移相值并非固定值。在不同温度下,和、差两路相移幅度是不均衡的,即不同温度下,和、差两路相位差值并不固定,造成不同温度下需频繁重新校相。
1.3 对温度敏感的设备分析
该S/X/Ka三频天线接收系统跟踪设备分为室内设备和室外设备。其中,室内设备处于设备机房,配备空调设备,常年维持恒温,因此温度对其相位的影响可以忽略不计。室外设备分为天线馈源、低噪声放大器、下变频器、光发射机、射频同轴电缆和光缆部分。天线馈源部分Ka频段全部采用波导连接,和、差信号通道相位差值取决于波导长度,是一个固定值,随温度的变化可忽略不计;和、差信号下变频后通过电光转换进行波分复用后由一根光缆同时传输,因此,光缆上和、差信号相位值随温度变化的幅度相同,相位差值也是固定值,不随温度变化。
通过以上分析可见,Ka频段低噪声放大器、Ka下变频器、光发射机和射频同轴电缆[3]任一设备随温度变化而相位变化不一致,就可导致移相值变化,从而影响天线跟踪性能。
2 温度变化试验
为模拟实际工作情况,本文将Ka频段低噪声放大器、Ka下变频器、光发射机和射频同轴电缆等室外设备放入温箱进行温度试验。试验框图如图3所示。
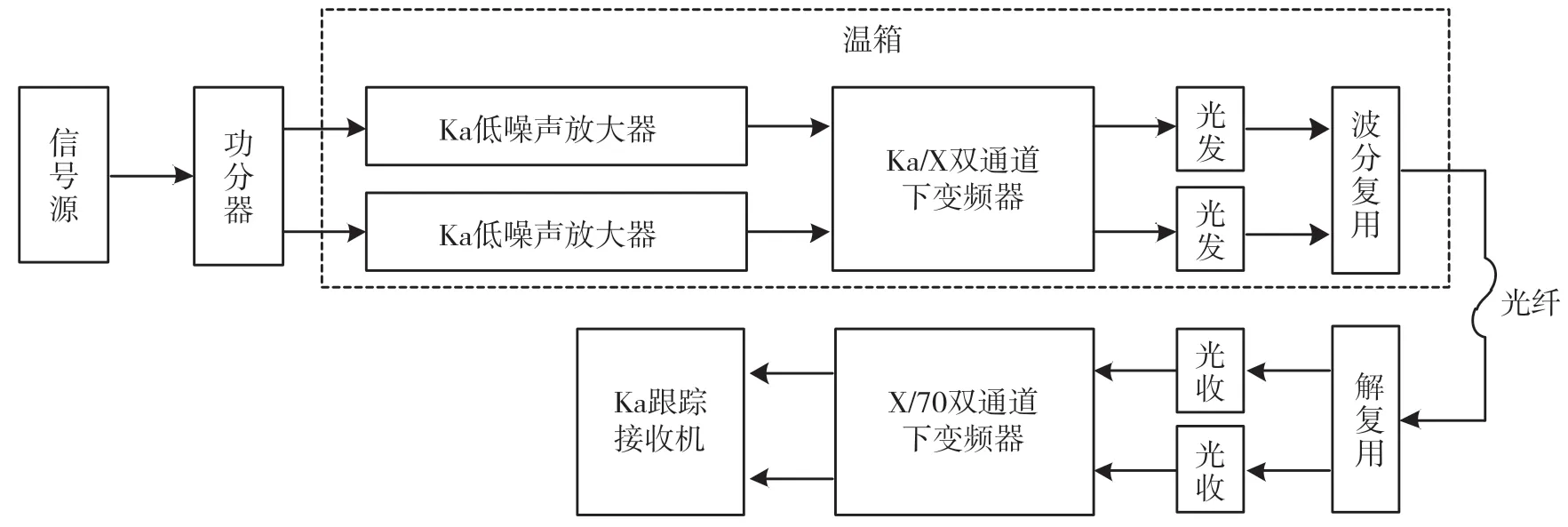
图3 温度试验框图
按照图3搭建试验链路。设置信号源频率和变频器频率为27.5 GHz(Ka频段频率范围为25.0~27.5 GHz,频率越高,相位变化随温度变化越剧烈,因此选取27.5 GHz进行试验),调整链路各个环节电平,使链路工作于线性状态。调节好后,各个设备衰减在整个试验过程不再改变。
根据室外工作温度-30~+50 ℃的要求,设置温箱温度进行循环。
(1)设置温箱温度为+25 ℃,保持30 min后,使用跟踪接收机本地校相功能,得到一组方位和俯仰相位值(PAZi,PELi),并记录。
(2)温箱进行升温。温箱温度每上升5 ℃并保持30 min后,使用跟踪接收机本地校相功能,得到一组方位和俯仰相位值(PAZi,PELi),并记录数据。直到升温到+50 ℃停止。
(3)以5 ℃步进进行降温。温箱温度每下降5 ℃并保持30 min后,使用跟踪接收机本地校相功能,得到一组方位和俯仰相位值(PAZi,PELi),并记录,直到降温至-30 ℃停止。
(4)以5 ℃步进进行升温。温箱温度每上升5 ℃并保持30 min后,使用跟踪接收机本地校相功能,得到一组方位和俯仰相位值(PAZi,PELi),并记录,直到升温至25 ℃时完成一个循环为止。
将试验结果绘制成曲线,如图4所示。

图4 相位值随温度变化曲线
从图4的试验结果可以看出:温度在20~50 ℃时,和差相位变化平稳,变化在10°以内;温度在0~20 ℃时,和差相位变化较为剧烈,变化在40°以内;温度在-30~0 ℃时,和差相位变化又趋于平滑,变化在20°以内。由此可见,春夏之交和秋冬之交时,温差较大,是相位值变化较大的时候,与站上反馈跟踪不稳的时间吻合,需根据温度情况重新修正相位值。
3 快速修正相位值方法
3.1 相位值快速粗修正
以环境温度20 ℃时校准的相位值作为基准值(PAZ0,PEL0),根据不同的温度,进行不同的修正操作。具体如下。
(1)当温度在20 ℃以上时,和差相位变化不大。此时,基准相位值无须修正亦可稳定跟踪。
(2)当温度在0~20 ℃时,将基准值减小20°,在卫星任务前填入相位值(PAZ0-20°,PEL0-20°),结合温度试验结果,真实相位值在(PAZ0,PEL0)~(PAZ0-40°,PEL0-40°),填入的相位值与真实准确相位值之差为±20°。根据相关文献理论研究,当和差通道相位差小于20°时,天线伺服系统能够很好地跟踪目标[4]。
(3)当温度在-30~0 ℃时,将基准值减小50°,在卫星任务前填入相位值(PAZ0-50°,PEL0-50°),结合温度试验结果,真实相位值在(PAZ0-40°,PEL0-40°)~(PAZ0-60°,PEL0-60°),填入相位值与真实准确相位值之差为±10°,同样,天线伺服系统能够很好地跟踪目标。
3.2 相位值快速精修正
采取以上相位值快速粗修正后,为避免李萨如图形出现画圈现象[5],需在快速粗修正基础上进行快速精修正。快速精修正是在卫星转入自跟踪后,通过观察李萨如图形旋转方向来进行修正[6]。若图形逆时针旋转,则快速将填入相位值减小10°;若图形顺时针旋转,则快速将填入相位值增加10°,可保证卫星平稳跟踪。
3.3 试验结论
相位值快速粗修正是在卫星任务前根据环境温度进行配置,因此无校相时间。相位值快速精修正是在卫星转入自跟踪后进行,因为只涉及简单的加减10°运算,调整时间不超过5 s,大大缩短了对星快速校相所需的69 s[7],很好地保证了卫星的稳定跟踪。与卫星站进行沟通后,站上操作员根据季节温度情况对相位值进行调整,实现了卫星的稳定跟踪,保证了数据的顺利接收。
4 结 语
针对Ka频段遥感卫星跟踪相位值随温度变化,导致对星校相时间不足问题,本文结合温度试验成果,掌握了某工程12 m S/X/Ka三频天线接收系统Ka频段温度相位变化规律,提出了一种快速修正相位值的方法,解决了该工程在季节交替时Ka频段卫星跟踪不稳的问题,为后续工程Ka频段卫星跟踪相位值快速修订提供了参考。