基于多传感器的无人机自主导地线巡视方法
2023-09-19钱金伟陈国辉
钱金伟,范 杨,陈国辉,辛 巍,张 灿
(国网湖北省电力有限公司检修公司,湖北武汉 430000)
在输电网络中,导地线是导线组织与地线组织的统称,对无人机飞行器设备而言,导地线负责将剩余供应电量转移至地下环境之中。在实际应用过程中,由于配电参数、电量敏感度、电压数值、电流数值等指标参量取值结果不同,导地线组织对传输电量的转存能力会有所不同[1]。一般来说,随着无人机作业任务的进行,供应电信号的累积量也会增多,此时导线组织传输电量的转移能力,将决定无人机设备实际飞行效果。出于安全性考虑,导地线还应具备一定电信号承载能力,在传输电量不能快速转存的情况下,导线装置能够暂时抵御电信号的攻击行为,使无人机设备在短时间内还能继续维持原有飞行状态[2]。
传感器是具有电量感知能力的电路连接元件,其存在位置不受电压强度、电流强度等外界干扰条件的影响。近年来,多传感器协同作用工作模式成为电力系统的主要发展方向,特别是对无人机供电体系来说,多传感器模式更能够实现传输电量信号的准确检测[3]。为促进无人机实际飞行能力,传统IMU 冗余补偿算法借助单一传感器元件记录无人机设备的实际行进状态,再借助导航主机对所记录信息深度分析[4]。然而,该方法并不能充分发挥无人机导地线的点电荷传输能力,易导致剩余供应电量转移行为受到威胁。为解决上述问题,提出一种基于多传感器的无人机自主导地线巡视方法。
1 量测数据预处理
无人机量测数据预处理包含多传感器配准原则构建、无人机电量供应数据获取、电信号检测三个执行环节。
1.1 多传感器配准原则构建
多传感器配准原则能够直接面对无人机导地线组织中的电量传输误差信息,并对其进行针对性处理,不但能够控制剩余供应电量信号对常规传输信号的影响强度,还可将电流、电压等电量指标的数值水平控制在既定区间之内,从根本上发挥无人机导地线的点电荷传输能力[5-6]。
设r0表示无人机剩余供应电量信号的初始传输位置,rn表示终止传输位置,n表示电量信号传输行为项指标,表示巡视传感器元件中的感应电流均值,表示感应电压均值,P表示巡视传感器元件的额定功率。联立上述物理量,将多传感器配准原则定义为:
1.2 无人机电量供应数据获取
无人机电量供应数据获取是实施自主导地线巡视算法关键执行环节,在多传感器配准原则支持下,规划供应电量转移指令的,限制对应节点处电量指标参量的数值变化趋势[7-8]。在不考虑其他干扰条件的情况下,无人机电量供应数据获取能力受导地线内电荷转移量、传感器电信号强度两项指标参量直接影响。导地线内电荷转移量可表示为O,在实际运算过程中,该项物理量可继续细分为转移量均值、特定转移量指标O1、O2,若参考多传感器配准原则影响能力,则的不等式条件恒成立。
传感器电信号强度表示为β,该项指标参量取值越大,传感器设备获取的无人机电量供应数据也就越多。在上述物理量支持下,联立式(1),可将无人机电量供应数据获取表达式定义为:
式中,q1、q2表示两个不同的电量信号供应系数。在已知无人机电量供应数据获取结果前提下,多级传感器设备元件可自主控制导地线内的剩余供应电量信息。
1.3 电信号检测
电信号检测是对无人机自主导地线内的剩余供应电量检测,能够决定多传感器巡检技术模型实用性价值,感应主机能获取的无人机电量供应数据越多,最终所得电信号检测结果越符合实际应用需求[9-10]。
设ϕmax表示剩余供应电量检测特征的最大取值,在传感器检测权限等于c的情况下,ϕmax>1 不等式条件恒成立。ω表示无人机自主导线信号在传输过程中迭代次数,若考虑多传感器配准原则作用能力,则可认为指标ω的取值结果始终与无人机电量供应数据获取表达式相关。在上述物理量支持下,联立式(2),可将电信号检测结果表示为:
其中,β表示与剩余供应电量信号相关巡视检测系数,δ表示特定电量处理系数。传感器元件根据电信号检测结果,确定无人机自主导地线内电量传输情况,按照实时配准原则,完成电信号参量传输能力判别。
2 无人机自主导地线巡视算法
2.1 作业域环境划分
在执行无人机自主导地线巡视指令前,划分作业域环境,尽可能多地将传感器节点安置在同一物理区间内[11-12]。
规定d0表示无人机自主导地线巡视作业域的核心节点,其物理坐标可表示为(x0,y0),dn表示一个随机选取的作业域节点,其物理坐标可表示为(xn,yn),n表示作业域规划系数的最大取值结果。利用上述两个物理坐标,可将点d0与点dn之间的距离表达式定义为:
设μ表示无人机自主导地线内的电量巡视指标,f表示电信号巡视感应特征值,lμ表示巡视指标为μ时的电信号定标量。联立上述物理量,将无人机自主导地线巡视算法的作业域环境划分表达式定义为:
为使各级传感器设备能够准确感知电量信号的传输行为,无人机自主导地线巡视技术只能在作业域环境中进行。
2.2 巡视节点定义
在作业域环境中,各级传感器设备所处连接位置不完全固定,为使无人机自主导地线内的剩余供应电量能够得到安全转移,必须按照既定原则对各类巡视节点进行定义[13]。假设原节点所处位置不改变,最末端节点到原节点间的巡视距离也不会发生改变,则可认为待转移的剩余供应电量越多,传感器元件内所累积的巡视信号量越大。
设λ表示基于多传感器配准原则的设备元件连接系数,m表示传感器元件内的电量信号转移权限指标,jmax表示最末端节点处的电量信号标度指征,jmin表示原节点处的电量信号标度指征。在上述物理量的支持下,联立式(5),可将巡视节点定义条件表示为:
对各级传感器设备元件而言,只有在已知巡视节点定义的条件下,才能实现无人机自主导地线内剩余供应电量信号安全转移[14]。
2.3 电信号敏感性分析
电信号敏感性分析是无人机自主导地线巡视算法搭建的末尾设计环节,在已知巡视节点定义条件的情况下,若将电信号敏感性能力作为恒定变量条件,则可认为导地线组织对于电量信号的容纳能力越强,最终所得巡视指令的实用性能力也就越强[15-16]。设kˉ表示单位时间内的供应电量信号转移均值,b1、b2表示两个不同的电量信号容纳指标,且在多传感器配准原则的作用下,b1≠b2的不等式条件恒成立。在上述物理量的支持下,联立式(6),可将电信号敏感性分析结果表示为:
至此,实现对各项指标参量的计算与处理,在各级传感器设备元件的支持下,完成基于多传感器的无人机自主导地线巡视技术研究。
3 实例分析
为突出基于多传感器的无人机自主导地线巡视算法、传统IMU 冗余补偿算法的实用差异性,设计如下对比实验。具体实验流程如下:
步骤一:选取图1(a)中的无人机设备作为实验对象。在其进入稳定飞行状态后,对导地线内的电信号传输行为进行调试,如图1(b)所示。

图1 实验环境
步骤二:利用基于多传感器的巡视算法对图2中的定量感应装置进行控制,将所获数据作为实验组变量。

图2 剩余供应电量信号检测
步骤三:利用传统IMU 冗余补偿算法对图2 中定量感应装置进行控制,将所获数据作为对照组变量;
步骤四:对比实验组、对照组变量数据。
无人机导地线设备对于点电荷的传输能力可以反映出所采用巡视方法的实用性价值。一般来说,无人机导地线设备对于点电荷的传输能力越强,剩余供应电量被安全转移至地下环境所需的消耗时间也就越短,此时,所采用巡视方法所具有的实用性价值也就越高;反之,若无人机导地线设备对于点电荷的传输能力较弱,剩余供应电量被安全转移至地下环境所需的消耗时间也就越长,此时,所采用巡视方法所具有的实用性价值也就相对较低。
表1 记录了实验组、对照组无人机导地线设备对于点电荷传输能力的数值对比情况。
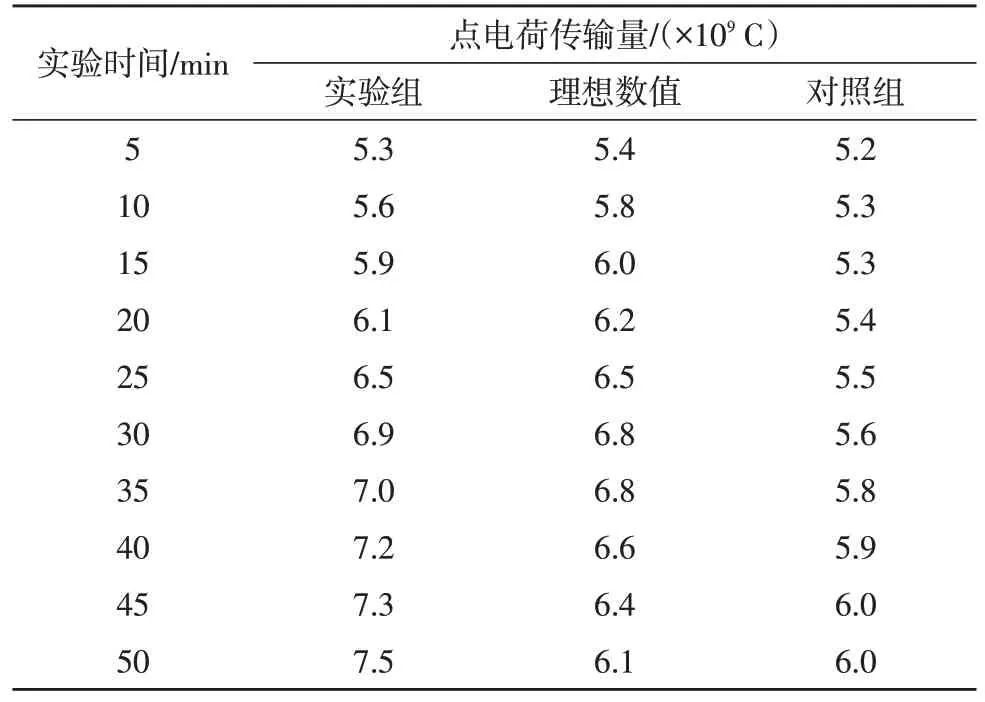
表1 点电荷传输能力
分析表1 可知,在理想情况下,点电荷的传输量保持先增大、再稳定、最后减小的数值变化趋势,整个实验过程中,其最大数值达到了6.8×109C,且该数值水平能够保持5 min 的稳定存在状态。
实验组点电荷的传输量在整个实验过程中始终保持不断增大的数值变化状态,其最大值7.5×109C与理想最大值6.8×109C 相比,上升了0.7×109C。
对照组点电荷的传输量则保持先上升、再稳定的数值变化状态,整个实验过程中,其最大数值仅能达到6.0×109C 与理想最大值6.8×109C 相比,下降了0.8×109C,远低于实验组极值水平。
综合上述研究结果可得出实验结论如下:
1)随着基于多传感器巡视技术模型的应用,无人机导地线设备对于点电荷的传输能力得到了一定程度的促进;
2)基于多传感器巡视技术模型能够将剩余供应电量安全且快速地转移至地下环境之中,与传统IMU 冗余补偿算法相比,这种新型巡视方法具备较强的实际可行性。
4 结束语
新型无人机自主导地线巡视模型以多传感器配准原则为基础,对已获取的无人机电量供应数据进行按需处理,又根据电信号的实时检测结果,将整个作业域环境划分成多个标准参考区间,不但能够精准定义各级巡检节点,也可以得到符合应用需求的电信号敏感性分析结果。从实用性角度来看,在这种新型巡视模型的作用下,无人机导地线设备在单位时间内所传输的点电荷数量水平明显增大,能够在较短时间内将剩余供应电量安全转移至地下环境中,与传统IMU冗余补偿算法相比,具有更强的可行性价值。