高速列车跟踪的有限时间复合控制器设计
2023-09-17宋跞为
宋跞为
(大连交通大学自动化与电气工程学院,辽宁 大连 116028)
目前,中国高速列车技术不断发展。相应地,对列车的状态实现有效监测,及时跟踪运行轨迹,是高铁运输行业的重中之重。目前,对于列车运行状态的分析,主要采用多质点模型[1-2]方式。该模型相较于单质点模型[3],充分考虑了相邻车厢之间的耦合作用力——车钩力,因此,能够更好地对高速列车的纵向运动状态进行描述,并且已有相关研究应用于高速列车的跟踪控制。
由于高速列车的高速运行特性,在较短的时间范围内,尽管非常小的作用力作用于相邻车厢,但它们之间的相对位移也有可能发生较大的变化,从而导致列车发生脱钩事故。因此,在限定的时间内研究高速列车的稳定性问题更有意义。高速列车在运行过程中受到附加阻力和运行噪声等诸多外部扰动的影响,因此,在扰动条件下,研究高速列车的有限时间有界性(Finite Time Boundness,FTB)更为重要[4-5]。列车在运行过程中会受到阵风的干扰,所以阵风阻力对于研究高速列车的跟踪控制往往是不可忽视的重要因素[6-7]。另外,旅客人数及行李箱的增减、戴维斯系数变化等不确定性因素对于列车的运行有着不可忽视的影响。尽管有学者通过分析强风条件下的空气阻力变化,将滑模控制器[8]用于消除模型误差,但是该方法忽略了系统输入时滞的影响。
综上所述,本文考虑输入时变时滞、可建模阵风和系统不确定性等因素对于高速列车的影响,提出了一种基于扰动观测器的有限时间复合控制器。该控制器包括反馈控制项和扰动补偿项,其中扰动补偿项能有效地估计阵风扰动,进而有效地实现高速列车的有限时间跟踪控制。
1 高速列车动力学系统建模
首先,车钩力的运动可近似为:f(xi)=kxi+,k>0 是刚性系数,d是阻尼系数。考虑列车的运行阻力Ra=c0+cvv+cav2,v为列车速度,c0、cv、ca为戴维斯系数,则得到高速列车的动力学方程如下:
式中:为i和i+1 节车间相对位移;、mi和为i车速度、质量和相对控制力;为附加阻力,dr(t)∈Rs;g(t)∈Rr,为仅作用于头车的阵风[4]。
式中:各系数形式详见文献[9];ΔA和ΔB为状态和输入不确定性,ΔA=M1F1(t)N1,ΔB=M2F2(t)N2,FiT(t)Fi(t)≤I。
其中,T为有限时间窗,ε1>0、ε2>0。
阵风g(t)可建模为:
在式中,未知扰动w(t)∈Rη,L1、L2与扰动幅值有关,W与扰动频率有关。
2 基于扰动观测器的有限时间复合跟踪控制器
本节中,首先针对g(t)设计扰动观测器:
式中:H为待设计的增益矩阵;W1=W+HGL1。
由式(2)—(4)可得:
假设1:rank(B)=rank([B G])。
引理1[10]:若假设1 成立,则存在矩阵B*,使得下式成立。
基于式(5)和式(6),设计如下的控制器:
其中,反馈控制项u1(t)和扰动补偿项u2(t)的具体形式为:
其中,待设计增益矩阵K∈Rn×(n-1)。令l(t)=t-tk,则式(8)中第一个方程改写为
将式(5)中第一个方程和式(7)代入式(2)可得:
定义1[11]:给定正标量c1>0,T>0,加权矩阵U>0,对于系统若有(c1、c2是常数),则(t)关于(c1,c2,U,T)是FTB 的。
令y(t)∈Rm=(t),假设(0)=0,本文设计有限时间复合跟踪控制器式(7),使得t∈[0,T],性能指标①和②成立: ①对于任意非零式(9)中的误差动态(t)关于(c1,c2,U,T,ε1,ε2,εd)是FTB 的;②
引理2:对于矩阵Z>0,标量τ>0,均有成立。
引理3:对于任意实矩阵χ1、χ2及Ω(t),若有ΩT(t)Ω(t)≤I成立,则存在任意正标量μ,使下式成立。
定义sym(J)=J+JT,基于引理2 及引理3,给出定理1。
定理1:给定加权矩阵U,正标量c1、μ(ii=1,2)、εi(i=1,2)和εd,若存在对称正定矩阵、、及R,矩阵Y1=、Y2=RH,正标量γ1、γ2、γd、σ和c2,使得下式成立。
则性能指标①和②同时得到满足。式(11)中,对称矩阵Θi,j满足下列关系:矩阵中其他元素为零。
证明:选择如式(13)所示的Lyapunov 候选函数。
对V(t)求导,且由引理2 及可得:
故有:
其中,X11=sym(PA)+Q-q-1Z+κG1TG1,X22=-eαqQ-q-1Z,X55=symR(W+HGL1),*为矩阵中对称元素。
由V(t)的定义,易知-αV(t)≤-αV1(t)-αV2(t);另外,考虑υ(t)的定义,则由式(16)和(17)可得:
基于Schur 补引理及引理3,则由式(18)可得:
其中, 对阵矩阵Λ i,j满足以下关系:矩阵中其他元素为零。
另一方面,式(11)可重新表示为:
其中,与Ψ的行数相同,且满足以下条件。12 中各元素为:
易知≥0,故可进一步得到Ψ<0;基于Schur补引理,则Ψ<0 等价于:
其中,对称矩阵Υ i,j满足以下关系:。矩阵中其他元素为零。
对式(18)从0 到T积分,基于Granwall 不等式可得:
由式(13)可知:
式(28)符合定义1,即若有定理1 成立,则有性能指标①得到满足。
类似的,由式(12)可得:
对式(29)从0 到T积分,考虑到V(t)≥0,则由Gronwall 不等式可得:
即,若有定理1 成立,则性能指标②得到满足。
综上所述,LMI(13)和LMI(14)保证性能指标①和②同时得到满足,故定理1 证毕。
3 仿真分析
在本节中,给出6 车模型的高速列车数值仿真算例,以验证设计方案的有效性。与高速列车动力学模型有关的仿真参数选取如表1 所示。另外,系统的测量输出矩阵C选择为C=I9。
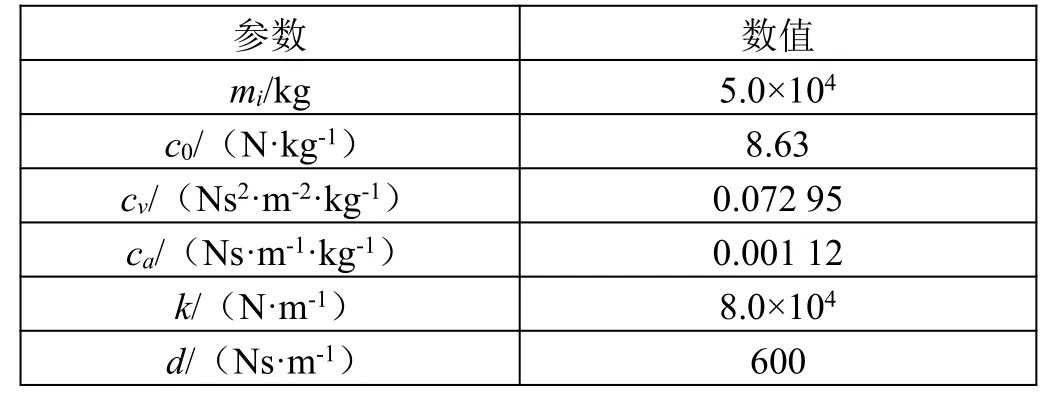
表1 高速列车仿真参数
令α=0.001,c1=4.33,q=0.2,κ=0.6,μ1=0.1,μ2=0.1,T=550,U=I11,由定理1 得到γ1=0.1、γ2=0.1 和γd=1.450 8,则求解得到控制器增益K和H的值,因K和H的维数较大,故此处略去。利用设计的有限时间复合跟踪控制器进行跟踪控制,得到的阵风估计结果和状态跟踪结果如图1 和图2 所示。状态跟踪的均方根误差(Root Mean Square Errors,RMSEs)如表2、表3 所示。

图1 阵风估计结果
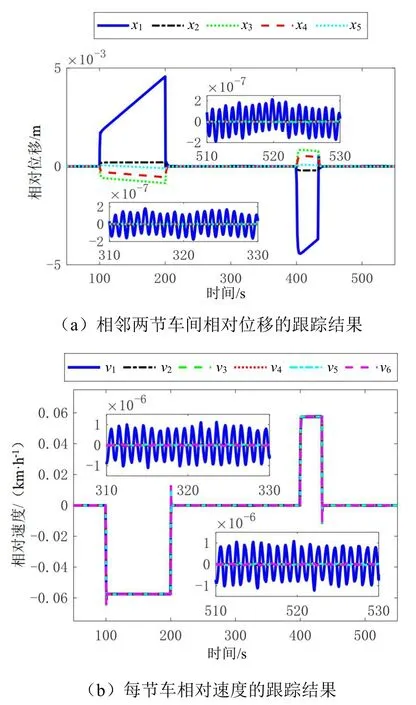
图2 相对位移和相对速度的跟踪结果

表2 相对位移跟踪的RMSEs

表3 相对速度跟踪的RMSEs
由图1 可知,设计的扰动观测器能够精确地估计阵风的真实值。由图2 可知,基于扰动观测器,设计的有限时间复合控制器能有效地实现高速列车的跟踪控制。表2、表3 进一步证明了设计的有效性。经计算,阵风估计的RMSEs 为0.125 0,表明阵风估计较为精确,从而使相对位移和相对速度跟踪误差均相对较小,如表2、表3 所示,相对位移的跟踪误差均未超过2×10-3,而相对速度跟踪误差均未超过3×10-2。
综上,本文设计的基于扰动观测器的有限时间复合控制器,不仅能有效估计阵风扰动,而且能保证闭环误差系统对于系统不确定性和外部扰动的FTB,以及测量输出对于系统不确定性和外部扰动的鲁棒性能,从而有效地实现了对高速列车位移和速度的有限时间跟踪控制。
4 结论
本文考虑系统的不确定性、阵风和外部扰动的影响,针对高速列车的位移和速度跟踪控制问题,提出了一种基于扰动观测器的有限时间复合控制策略。设计的复合控制器包括采样反馈控制项及扰动补偿项,视采样反馈控制项为输入时变时滞,建立了时变时滞误差系统,并将控制器的设计问题转化为LMI问题。给出仿真算例,通过仿真结果和分析,得出如下结论:设计的扰动观测器能够有效地估计阵风的真实值;基于设计的扰动观测器,提出的有限时间复合控制器保证了误差动态对外部扰动和不确定的FTB;提出的有限时间复合控制器保证了测量输出对于外部扰动和不确定的有限时间鲁棒性。
