一种遥感影像有效像元覆盖范围快速提取方法
2023-09-12李冠达
李冠达
(1.自然资源部第三航测遥感院,四川 成都;2.自然资源部西南山地自然资源遥感监测工程技术创新中心,四川 成都)
前言
遥感影像有效像元覆盖范围的提取对于遥感分类、解译、影像拼接等多方面研究与测绘产品生产、管理、遥感影像统筹、自然资源监管等多方面应用具有重要作用。目前,遥感影像有效范围像元覆盖范围提取有三类:2012 年高娟等提出区域生长法[1];2014 年王慧贤等提出扫描线法[2];2015 年,陶强强等在扫描线法基础上提出两阶段扫描法[3];2019 年,高磊等提出阈值法[4];2021 年,饶锦蒙等在阈值法基础上提出矢量边界法[5]。本文鉴于遥感影像有效范围的连续性,提出一种快速准确的遥感影像有效像元覆盖范围提取方法。该方法在保证有效范围准确性的同时,有效降低了算法的时间复杂度,大大提高了遥感影像有效像元覆盖范围的提取效率。
1 原理与方法
设有遥感影像I,其有效范值的取值范围为rv。则当满足I(x,y)∈rv时,位于y 行x 列的像元位于有效范围内。为求遥感影像的有效范围,我们还需对影像进行矢量化得出其地理空间位置,设I 的地理坐标与像元坐标的仿射变换为Γ,则有遥感影像有效范围αv=F(I),满足公式(1),其中Xp=[1 x y]T。
上述方法可以准确提取遥感影像的有效范围,然而处理过程中需要对每一个像元进行分类与检索,相对于遥感影像的单边尺寸,其时间复杂度为O(n2),应用于数据量较大的遥感影像时,其运算效率偏低。
2 加速算法
为了快速探测出遥感影像有效范围边界,可以对遥感影像I 进行降采样处理,则有Id=D(I,k),且满足公式(2)。其中k 为降采样系数,且满足k<1。
所得Id即为降采样遥感影像,设I 的像元列数为m,像元行数为n,则Id的像元列数为km,像元行数为kn。这样我们就得到了一个像元更少的遥感影像,可以快速检测出精确度较低的影像有效范围边界。与此同时,若有效范围中存在取值为无效值的个别误差像元,在降采样后也会被有效剔除。
采用公式(1)对Id运算可提取精度较低的遥感影像有效范围αd,对αd提取边线便可得到精确度较低的影像有效范围边界λd,设提取边线算法为L,则有公式(3)。
设遥感影像I 的分辨率为ρ,边界λd误差ε<εd,并满足公式(4)。
以εd为缓冲区半径,对λd构建缓冲区,设构建缓冲区算法为buf,则有缓冲区βd满足公式(5)。
则遥感影像有效范围的精确边界E 必然在缓冲区βd内。采用公式(1)对Ib提取有效范围便可得出在缓冲区βd内的有效范围αb,则利用公式(6)便可求得准确的遥感影像有效范围。
改进后的加速算法避免了对遥感影像的完全像素检测,大量的有效范围与无效范围内的像元不再需要被检测,而只有有效范围边界附近的像元需要被检测,那么这个检测范围,相对于遥感影像的单边尺寸,其时间复杂度为O(n)。
3 算法实现
3.1 像元分类
在提取遥感影像有效范围提取之前,我们需要对遥感影像像元分类,标准的遥感影像往往会设定单一的无效像元的取值,称之为无效值[6],这样我们便很容易将两类像元进行分类。然而对于一些没有设定无效值的遥感影像,我们则需要判断其有效像元与无效像元的取值范围,并进行分类。一般遥感影像有效像元取值服从正态分布,无效像元的取值则服从脉冲分布,带有无效像元的影像整体呈现双峰分布,因此采用最大类间方差法(OTSU)[7]便可以对遥感影像的有效范围与无效范围进行有效分类。依据最大类间方差法,则有分类算法c 满足公式(7),其中σ 为类间方差。
3.2 缓冲区分块
改进算法理论上可以只检测βd中的像元,便可提取遥感影像有效范围的边界,然而影像是一个像元矩阵,我们无法利用缓冲区范围直接提取像元数据,事实上完全依照该公式,我们仍然需要对影像的像元进行完全检测以判断哪些像元是处于该范围内的。因此在算法的实现中,我们可以将缓冲区域分割为更小的矩形区域,从而提取与这些矩形区域向对应的像元矩阵进行检测。
如图1 所示,我们可以将遥感影像分块为l×l 的像元矩阵,如公式(8)所示。
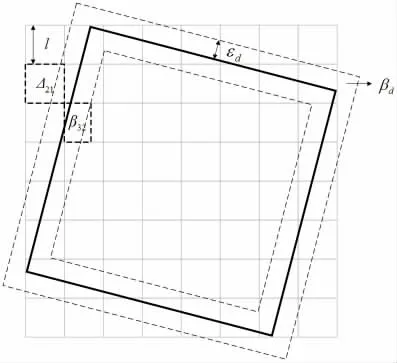
图1 缓冲区分块示意
对Irc范围矢量化,则有Irc对应得空间范围如公式(9)所示。
将Δrc与公式(5)所得的缓冲区βd相交后获取正外接矩形,便可获得在l×l 尺度下最小的分块,如公式(10)所示,MBR 为获取正外接矩形函数。
对分割后的缓冲区块βrc进行反向的仿射变换获取其对应像元的行列位置,则可得βrc对应的像元矩阵,应用公式(1)便可提取βrc内的有效范围αrc。那么遥感影像有效范围便可采用公式(11)得出。
3.3 矢量化的简化
此外,我们提取遥感影像有效范围是以像元为最小单位的,矢量化后的遥感影像有效范围在斜边处会呈现矩形锯齿状,在实际应用中一般我们会进行简化处理以消除锯齿,且简化后的矢量图形更加简单,有利于提高改进算法的速度,因此,公式(1)应加入简化函数S,简化误差应为像元大小的一半,在空间坐标系下即为,如公式(12)所示。
那么边界Ed误差极限εd则应加入简化误差,满足公式(13)。
3.4 算法流程
综合上述加速算法与为实现算法的改进,我们获得了一个工程化的遥感影像有效范围快速提取算法流程,如下:
4 实验
为检验算法的可靠性与效率,我们采用实验的方法分别测试算法的精度与速度。算法采用GDAL 库实现,并采用了GDAL 中的虚拟文件(VRT)技术[6]避免生成临时影像文件,去除了中间数据读写造成的计算消耗,能够更准确地反映算法本身的运算效率。
4.1 精度实验
在精度实验中,我们不对算法的最终范围进行简化处理,以期更精确地对比算法精度,在实验中我们对带孔洞的河流范围DEM影像采用各种算法进行有效范围提取实验,实验结果如图2 所示。
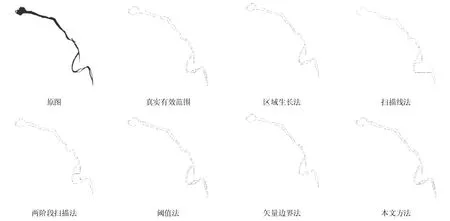
图2 带孔洞的河流范围DEM 影像有效范围提取对比实验结果
由实验结果可知,除两种扫描线法外,各算法都能良好应用于具有复杂边界的遥感影像;只有阈值法与本文算法适用于具有无效孔洞的遥感影像。因此本文算法可以精确地提取不同种类遥感影像的有效范围,具有良好的适用性。
4.2 速度实验
在速度实验中,我们采用四幅尺寸不同各算法均适用的常规正射遥感影像作为实验对象,四幅影像尺寸分别为:9 831×9 758,28 818×28 367,39 212×38 872,53 935×52 096。并采用各算法对四幅遥感影像进行10 次测试并记录平均时间,实验结果如表1 所示。实验结果表明,本文算法的运算速度优于现有的其他算法;数据量越大,本文算法相较于其他算法速度越优。
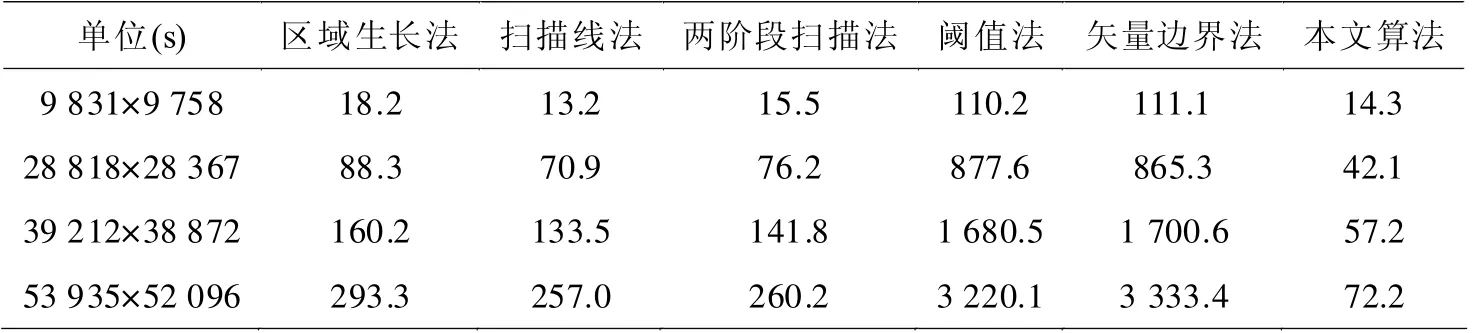
表1 速度对比实验时间统计
5 结论
本文通过降采样快速探测遥感影像有效范围边界,再对边界区域进行高精度检测提取准确的遥感影像有效像元覆盖范围,在保证准确性的同时,有效地减少了算法复杂度。实验证明,相较于现有算法,本算法同时具有高精度与高速度的特点,尤其在针对大数据量的遥感影像运算中,本文算法的速度优势尤为显著,更适合应用于大规模的遥感影像生产与应用。值得一提的是,当应用于图幅巨大的遥感影像时,本算法可以通过多次降采样探测有效范围边界进一步提升算法速度。
