六自由度水下机械臂设计与分析*
2023-08-31赵飞
赵 飞
(镇江市高等专科学校 电气与信息学院,江苏 镇江 212028)
0 引 言
有缆水下机器人(ROV)经过了半个多世纪的发展,目前已受到了各国的广泛关注。其具有灵活的大深度水下运动能力,可替代潜水员进入较深水域和危险环境进行工作,是众多海洋工程项目(如水下油气开采、输油管道和海底电缆铺设等)必不可少的水下作业装备,其中深海机械臂是ROV深海作业的主要操作设备。
在各国开发的ROV中,均配有多功能机械臂[1],如SMD的QUANTUM,伍兹霍尔海洋研究所研制的JASON ROV,上海交通大学承担的国家科技重大专项——“海龙号”等;但针对水下采油树作业要求的ROV水下机械臂目前仍不多见。
国内外学者对机械臂的设计、控制、仿真、实验等方面进行了广泛的研究。从应用领域看,ROV主要有水下和陆用两种。
1)水下机械臂方面的研究。胡淼等人[2]设计了一种舰船用水下应急维修机械臂,采用解析法对机械臂运动学逆解进行了计算;但其功能较简单,无法完成复杂的作业要求,只是应急使用。魏晓霞等人[3]设计了一种核电站用水下爬行与潜浮双功能机器人,建立了四自由度活动关节运动学模型,得到了其运动学特征方程。CHENG Yu-jun等人[4]研究了在笛卡尔坐标系下,具有不同运动姿态的水下机械手的水动力系数和流场特性,以及在亚临界范围内,机械臂的截面形状、间距和相互作用对水动力性能的影响。LI De-jun等人[5]提出了一种水下机械手末端位置偏移的补偿方法,提高了水下机器人运动学模型的精度,为水下机器人精确的位置控制奠定了基础。WANG Jun-li等人[6]提出了一种机械手关节角度的估计方法,该方法对于水下机器人自动控制的状态估计是可行的;但是该方法控制策略较复杂,同步效果无主从控制理想。
2)陆用机械臂方面的研究。刘萍等人[7-9]利用MATLAB软件,对五自由度关节式机械手、KUKA机器人、六自由度工业机器人手臂运动学特性进行了仿真分析。高东强等人[10-11]对SCARA机械手、工业机器人的轨迹规划和运动学开展了仿真分析。梁一等人[12]对设计的六自由度水下机械臂进行了试验验证等相关方面的研究。陶鑫瑞等人[13-15]对气动机械手、气动三自由度并联平移型机器人的控制策略进行了研究,各种陆用机械臂的分析方法对于水下机械臂的分析有一定的参考和借鉴作用;但其设计的机械臂手爪功能普遍简单,作业能力有限。SUN Hao等人[16]采用DH表示法和欧拉-拉格朗日动力学法,建立了六自由度机械手的全驱动系统模型。LIU Zhu-feng等人[17]采用增材制造方法,创建了多自由度制造平台,在先进制造领域中显示出了该应用的前景。WU Jun等人[18]基于动态和控制系统的模型,对二自由度并联机器人的机电性能进行了预测。
综上所述,陆用机械臂及水下机械臂的设计和分析研究较多,但夹持手爪设计的普遍简单、功能不强。针对ROV的深海工作环境,具备六自由度的水下机械臂设计,尤其是带有平动夹持手爪满足多种作业需求的机械臂尚未可见。
基于此,笔者以ROV应用为背景,设计六自由度水下机械臂,采用四边形机构冗余设计夹持手爪(使其满足水下采油树作业要求,同时六自由度赋予机械臂极大的作业范围);利用D-H参数法求解机械臂的正、逆运动学,并利用MATLAB软件仿真各活动关节的运动轨迹,结合蒙特卡洛法求解机械臂的工作空间,验证机械臂设计和分析的合理性和正确性;最后对搭载在ROV上的六自由度机械臂开展陆上和水下实验。
1 总体设计
笔者设计的六自由度水下机械臂,采用了液压驱动,主从手控制方式[19]。其主要结构可分为机械手本体、液压驱动系统、控制系统3部分。
1)机械手本体采用关节型结构,其特点在于结构紧凑,工作范围广;2)液压驱动系统适合大负载的输出,其具有压力补偿特性,能够自适应深海压力变化,保证系统的可靠性;3)控制系统采用的是主从控制方式,通过视频监控台,由操作员操作主手,通过控制器对从手进行控制,实现了超视距的遥控控制目标。
结合水下作业要求,笔者所设计的水下机械臂技术参数如表1所示。
六自由度机械臂本体包括6个活动关节和1个夹持手爪。6个关节中包含3个腕关节(关节一、关节五、关节六)和3个肘关节(关节二、关节三、关节四)。具体的机械臂结构如图1所示。

图1 机械臂结构
笔者所设计的机械臂各个活动关节转角范围如表2所示。

表2 机械臂活动关节转角范围
水下机械臂采用闭式压力自适应液压系统,由变频电机驱动恒量泵输出油压,经过控制阀输入液压缸/液压马达。液压系统具有压力自适应性,能够根据工作水深,自动调节系统工作压力,解决了深海工况下的密封及耐压问题。
六自由度机械臂液压系统原理图如图2所示。
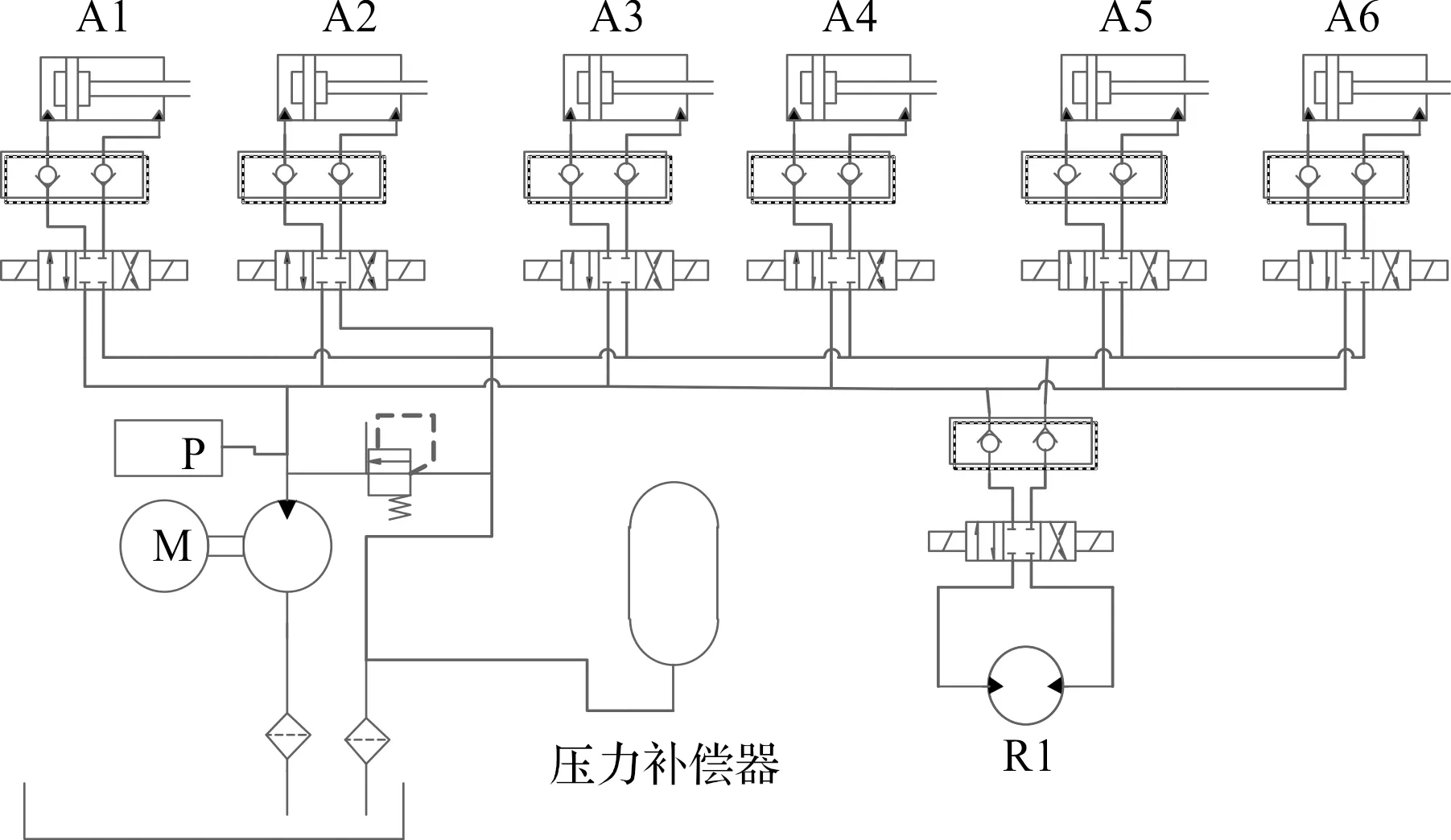
图2 六自由度机械臂液压系统原理图
水下机械臂控制系统采用主从式控制方式,其控制系统包括主手、水面控制系统及水下主控系统。主手输出操作控制信号,经过主手控制器输入至从手控制器,从手控制器控制液压系统以驱动从手动作。其中,操作员通过视觉对机械手的主手进行操作,主手有各个关节的角度传感器,控制器检测各关节的角度对从手的关节驱动器(液压缸或摆动缸)的位置进行控制。
主手结构如图3所示。
2 夹持手爪及活动关节设计
2.1 夹持手爪设计
机械臂的夹持手爪至关重要,决定了机械臂执行任务的通用性和广泛性,好的夹持手爪可以极大地提高水下机器人的工作效率和可靠性。夹持手爪采用四边形机构冗余设计,保证其开口始终处于平动张开或夹紧状态。
夹持手爪结构如图4所示。
夹持手爪运动和受力分析示意图如图5所示。

图5 夹持手爪运动和受力分析示意图
手爪闭合时,液压缸不输出作用力,此时的o5初始位置为:
a0=l1cosa
(1)
手爪张开时,液压缸作用行程a,此时o5终止位置如下:
a+a0=l1cosβ+rsinγ
(2)
液压缸行程a的表达式为:
a=l1(cosβ-cosα)+rsinγ
(3)
由几何关系可知:
(4)
(5)
手爪开合尺寸2b与液压缸作用行程a满足:
(6)
根据o2和o5处受力平衡,有:
∑Fo2=0
(7)
∑Fo5=0
(8)
根据o处力矩平衡,有:
∑Mo=0
(9)
综上所述,可求得液压缸的驱动力P和手爪夹紧力F的关系:
(10)
(11)
根据表1水下机械臂技术参数,笔者结合实际设计要求,确定已知量:b=60 mm,d=18 mm,r=12 mm,α=60°,μ=0.3。
根据液压缸的驱动力P最小和液压缸行程a最短原则,笔者建立多目标优化数学模型(此时,设计变量分别为l1,l2,γ,β,共4个)。
目标函数为:
(12)
约束函数为:
(13)
手爪夹紧力F关系式为:
F=k1k2k3G
(14)
式中:k1为安全系数,1.2;k2为加速度工作系数,1.1;k3为方位系数,4。
笔者利用MATLAB软件求解变量,并取整得出:a=20 mm,l2=66 mm,β=41°,γ=60°。
2.2 活动关节设计
6个活动关节的运动机构都可以简化成摆动导杆机构。活动关节的机构简图如图6所示。

图6 活动关节机构简图
根据O点的力矩平衡,建立关系式:
(15)
根据余弦定理有:
(16)
结合机械臂的作业情况,笔者合理选择各参数,在保证结构紧凑和表2中要求的机械臂活动关节转角范围前提下,避免发生运动干涉。
3 运动学求解
3.1 正运动求解
笔者对机械臂采用D-H参数法进行了数学建模,初始坐标系选择在基座上,按照右手定则和D-H参数法规则,依次建立各个关节处的坐标系。
水下机械臂数学模型坐标系如图7所示。

图7 机械臂坐标系
模型的机械臂D-H参数如表3所示。

表3 机械臂D-H参数
表3中,水下机械臂的具体结构参数为:l1=100 mm,l2=317 mm,l3=270 mm,l4=100 mm,l5=281 mm。
D-H参数法是通过相邻各个关节的齐次矩阵逐次变换的,以此来完成水下机械臂基座坐标系到末端坐标系的变换工作。其中,通用变换矩阵通式为:
i-1Ti=Rot(X,αi-1)Trans
(li-1,0,0)Trans(0,0,di)Rot(Z,θi)
(17)
其中:
(18)
(19)
(20)
(21)
求解的变换矩阵通式为:
i-1Ti=
(22)
笔者将表3中水下机械臂各参数数据代入变换矩阵通式,可求解出各个关节处的齐次变换矩阵如下:
(23)
(24)
(25)
(26)
(27)
(28)
(29)
式中:R3×3为机械臂姿态;P1×3为机械臂位置。
显然,水下机械臂末端执行器的位置和姿态是受各个关节的运动状态直接影响的,即:
(30)
其中,
c23=cos(θ2+θ3);s234=sin(θ2+θ3+θ4)。
3.2 逆运动求解
笔者根据已知机械臂末端执行器的位置姿态,反向求解每个关节的旋转角度,反映出的末端执行器位姿到各个关节转角的映射问题,其对于后续机械臂的路径规划和运动控制都是至关重要的。
可直接求解出θ1,公式如下:

(31)
(32)
故有:
pyc1-pxs1=-l5s5
(33)
(34)
(35)
求解出θ5,公式如下:
(36)
结合下式:
(37)
求解出θ6,如下:
θ6=θ56-θ5
(38)
(39)
故有:
(40)
求解出θ2,公式如下:
(41)
且有:
(42)
(43)
(44)
故有:
(45)
(46)
求解出θ3,公式如下:
(47)
求解出θ4,公式如下:
θ4=θ234-θ2-θ3
(48)
4 仿真分析
4.1 干涉分析
水下机械臂的夹持手爪采用冗余结构,各零件在满足设定参数目标时,极易发生干涉,导致设定参数目标无法实现或零件碰撞损坏。为此,需要进行干涉检查,在设计阶段分为2D总体干涉检查、3D结构干涉检查和运动仿真干涉检查3个过程,确保设计的准确性和可实施性。
笔者借助Solid works软件对活动关节进行运动仿真,保证各零件间无干涉。
夹持卡爪部分结构干涉检查示意图如图8所示。

图8 夹持卡爪部分干涉检查示意图
4.2 运动轨迹仿真
笔者对机械臂由初始位置到目标位置的行程进行运动轨迹仿真,以研究其各个关节由初始位置到目标位置过程中的转角、速度和加速度曲线的规律和特征。为使运动轨迹仿真分析简便,假设初始位置关节角度为[0 0 0 0 0 0],目标位置关节角度为[0pi/4 -pi/6 0pi/6 0]。
在MATLAB软件中,按照图1机械臂的结构和表2中关节转角范围,笔者建立水下机械臂的仿真模型。机械臂仿真模型的初始位置如图9所示。

图9 机械臂仿真模型初始位置
机械臂初始位置的关节角度为[0 0 0 0 0 0],需要验证机械臂的仿真模型位置姿态与Solid works设计软件中的三维模型位置姿态完全相同。
机械臂三维设计模型的初始位置如图10所示。

图10 机械臂三维设计模型初始位置
此时机械臂总长为1 068 mm,且与利用D-H参数法建立的数学模型和MATLAB软件中的仿真模型一致,验证了MATLAB软件中仿真模型初始位置是正确的、可信的。
为确保机械臂仿真模型在各个目标位置都与设计模型一致,假设任意目标位置为[0pi/4 -pi/6 0pi/6 0]时,此时机械臂末端执行器的数学模型计算位置矢量为:
(49)
仿真模型显示结果如下:
(50)
计算位置矢量与仿真模型显示结果保持了高度一致(其中,仿真模型计算单位为m,求解数学模型单位为mm),通过对初始位置和假设的任意目标位置验证,保证了机械臂仿真模型运动轨迹的真实性,反映出所设计机械臂的运动姿态。
初始位置关节角度为[0 0 0 0 0 0],目标位置关节角度为[-pi/3pi/4 -pi/2pi/3pi/6pi/2],机械臂各关节位置变化曲线仿真结果如图11所示。

图11 机械臂各关节位置变化曲线
机械臂各关节速度变化曲线如图12所示。
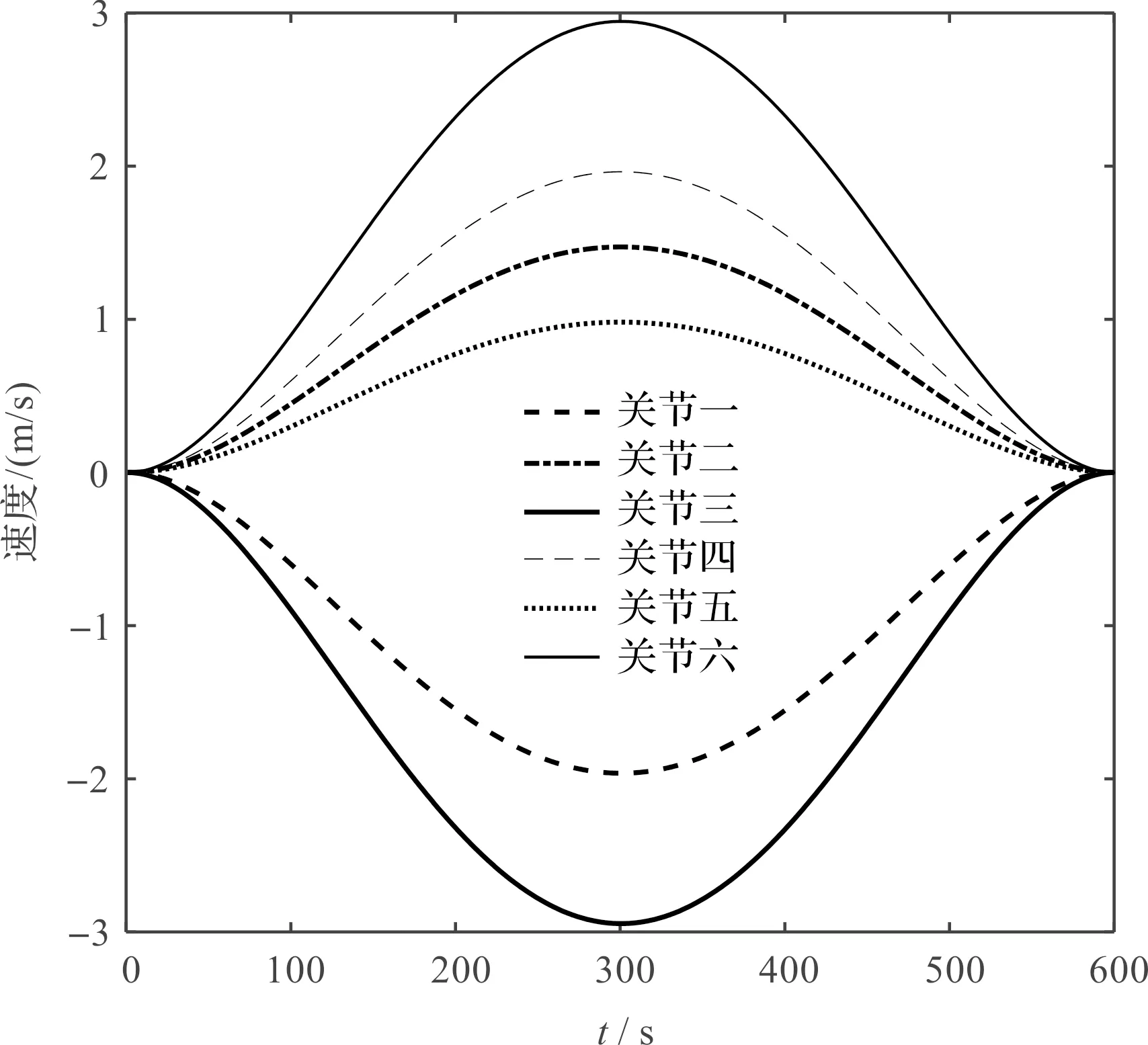
图12 机械臂各关节速度变化曲线
机械臂各关节加速度变化曲线如图13所示。

图13 机械臂各关节加速度变化曲线
根据运动轨迹仿真可知:在整个过程中,机械臂的各个关节速度和加速度曲线都是光滑平顺的、无突变点,不存在超调现象,速度曲线与加速度曲线呈正弦曲线规律变化趋势,且相互对应,加减速性能良好,可以保证机械臂的实际作业要求。
4.3 工作空间仿真
笔者利用蒙特卡洛法随机抽样,对水下机械臂末端执行器到达的全部空间点进行采集,来展示机械臂的实际工作空间,求解出末端执行器的极限工作位置,确保水下机械臂满足设计指标要求。
水下机械臂采样的工作空间仿真如图14所示(选取随机采样20 000个点)。

图14 机械臂工作空间采样仿真
机械臂末端能够到达的采样工作空间点云三维图,如图15所示。

图15 工作空间点云三维图
水下机械臂采样工作空间XY平面云图,如图16所示。
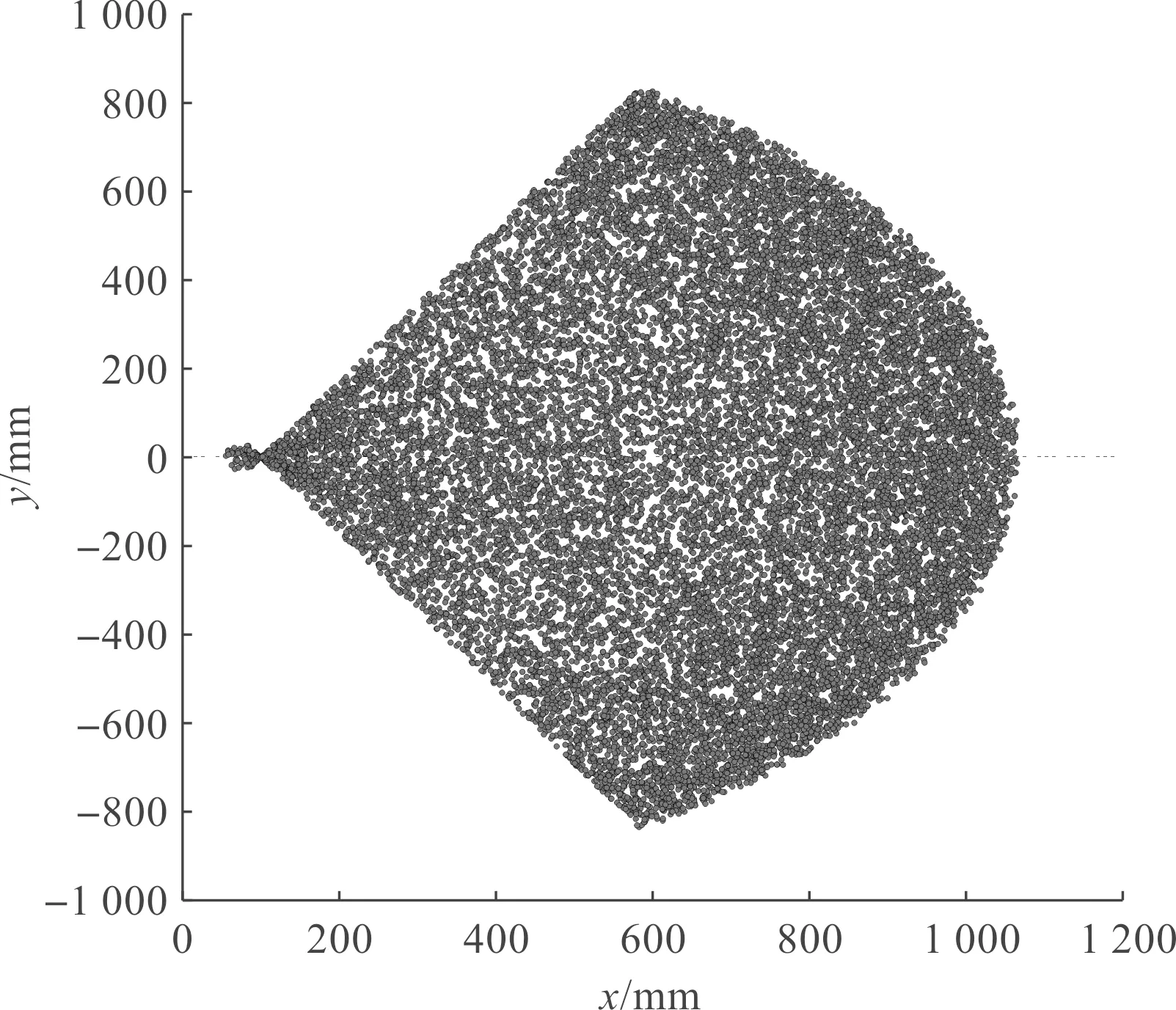
图16 工作空间XY平面云图
水下机械臂采样工作空间XZ平面云图,如图17所示。

图17 工作空间XZ平面云图
水下机械臂采样工作空间YZ平面云图,如图18所示。
笔者对随机采样工作空间点进行统计,求解的机械臂末端能够到达的采样工作空间范围如表4所示。

表4 随机采样点工作空间范围
根据工作空间采样仿真分析可知:求解的机械臂末端工作空间X坐标范围是94.1 mm~1 029.2 mm,Y坐标范围是-814.1 mm~768.9 mm,Z坐标范围是-310 mm~643 mm,其数值范围满足设计要求。
该工作范围的限界为下一步研究主从控制提供了位置参考。
5 样机及测试
笔者通过控制主机械臂6个自由度和夹持手爪开闭按钮,使从机械臂完成6个自由度运动控制和夹持手爪开闭功能的工作。考虑到安全问题,测试时每次只操纵主手一个自由度,观测从机械手是否达到预期的响应。
关节五运动调试如图19所示。

图19 关节五运动调试
关节四运动调试如图20所示。
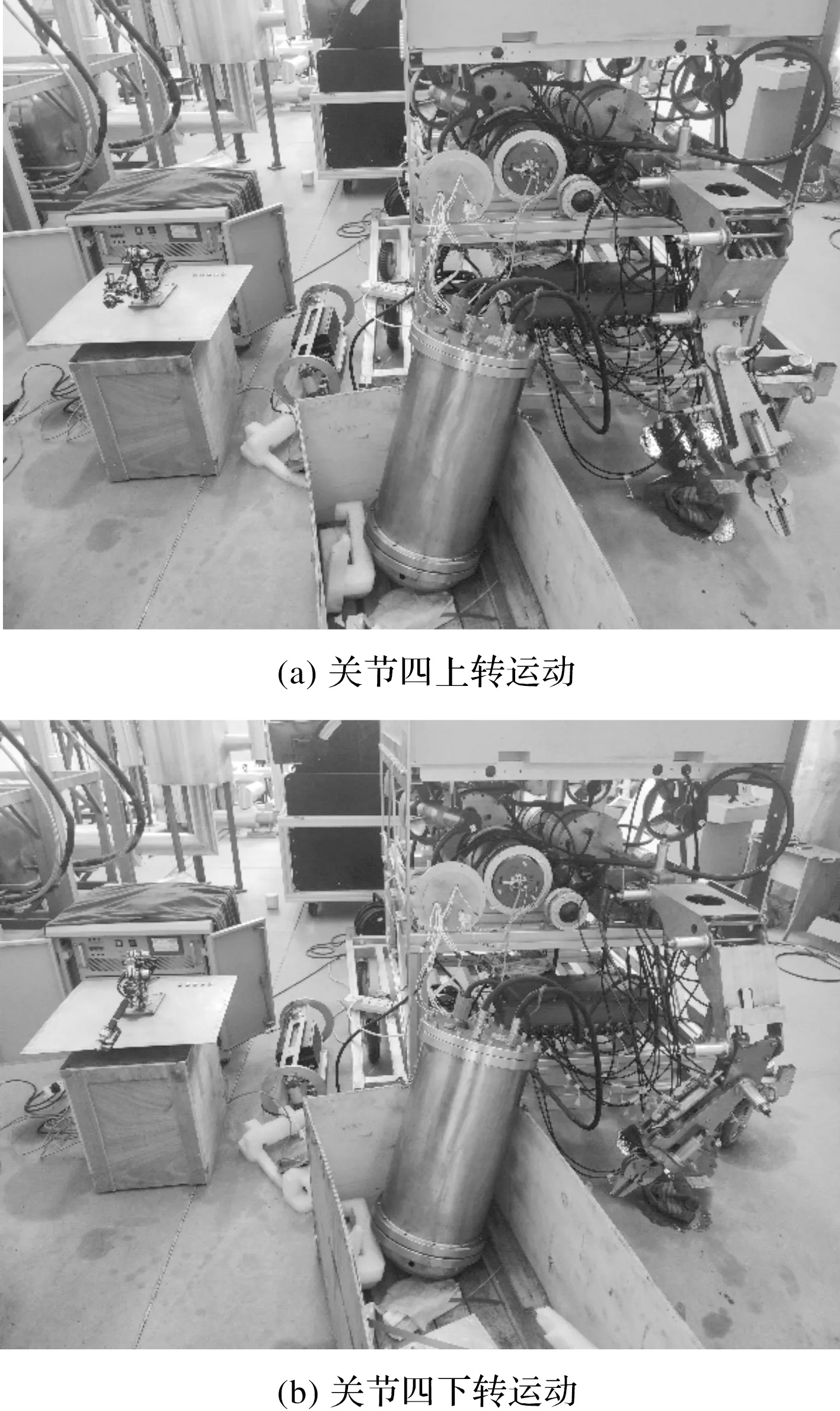
图20 关节四运动调试
实验表明:从机械臂能够跟随主机械臂运动,加减速性能良好,各关节转角范围满足设计要求。
搭载水下从机械臂的ROV样机如图21所示。

图21 搭载水下从机械臂的ROV样机
主机械臂样机如图22所示。

图22 主机械臂样机
主、从机械臂系统联调测试通过后即可开展水下实验,进一步验证设计的合理性。
ROV设备在水中无动力悬浮和深潜实验时固定摄像头拍摄的机械臂,如图23所示。
图23 水下实验
6 结束语
针对ROV上搭载的机械臂作业能力弱、范围小的问题,笔者设计了一种带有平动开合功能夹持手爪的六自由度水下机械臂,其采用液压驱动,主从手控制方式,实现了主手对从手的关节驱动器(液压缸或摆动缸)的位置控制目的。
首先,笔者求解了其正、逆运动学,并利用MATLAB仿真分析了其运动轨迹;然后,采用蒙特卡洛法求解了机械臂的工作空间范围;最后,搭建样机进行了实验验证。
研究结果表明:
1)采用多目标优化规则设计的夹持手爪,其液压缸最短行程在20 mm时,即可实现手爪的120 mm平动开合范围目标,样机实验验证了该设计计算的正确性;
2)仿真分析得出了机械臂各个关节位置、速度、加速度曲线平滑、无突变,不存在超调现象,样机实验证实了各个活动关节加减速性能良好;
3)仿真分析求解的机械臂末端工作空间X坐标范围是94.1 mm~1 029.2 mm,Y坐标范围是-814.1 mm~768.9 mm,Z坐标范围是-310 mm~643 mm,该范围与设计指标基本一致,可以满足其作业要求。
后续工作中,笔者将继续开展样机的实验研究,不断优化完善机械臂的结构和功能,并开展水下双机械臂协同动作控制研究。
