低植株果实收获机的设计与实现
2023-08-28易靖涵韩世杰及致双
易靖涵 韩世杰 及致双
1.周口师范学院图书馆,河南周口 466000;2.周口师范学院物理与电信工程学院,河南周口 466000
0 引言
低植株果实收获机,顾名思义就是针对生长较矮的果蔬植株而设计的一种收获机,它与传统高植株的果实收获机有着显著的差别。采用低植株果实收获机进行收割,可以极大地提高农作物的产量和品质,同时降低劳动强度和人力成本。随着现代科技的逐步成熟,低植株果实收获机在现代化农业,尤其是种植规模化、精细化管理的农业生产中,发挥着越来越重要的作用。
首先,低植株果实收获机的应用可以极大地提高农作物的产量。与传统高植株的果实收获机相比,低植株果实收获机可以有效地采摘低矮作物上的果实,提高了采摘效率,节约了人力成本,并且大大降低了因误伤或过高落果等原因所导致的果实损失,因此可以实现更加高效和稳定的收割。
其次,低植株果实收获机的应用还可以提升农产品的品质。传统高植株的果实收获机在采摘过程中往往会带来摔伤、碰伤等问题,从而影响了果实的品质。低植株果实收获机采用了特殊的收割技术和设备,可以在不对农作物造成不良影响的情况下,精确地采摘每一个果实,保证了果实的完整性和质量,进而提高了农产品的附加值。
此外,低植株果实收获机的应用也大大降低了采摘劳动强度和人力成本。传统的人工收割需要人力物力,成本较高。而利用低植株果实收获机进行收割,既能解决劳动力短缺问题,也能让农民将更多的精力投入到科技、管理等方面,进一步提高农业产业的科技含量和生产效率。
综上所述,低植株果实收获机在现代农业生产中具有广泛的应用前景和较大的发展潜力。它不仅可以提高农作物产量和品质,还可以降低采摘劳动强度和人力成本,从而满足农业精细化、规模化、智能化等多种需求,促进农业结构调整和提质增效。
1 地下果实收获农机的研究方案
以农作物花生为例,花生的收获要经过多个繁琐的步骤:拔出、晾晒、除泥、去秧、清选、脱壳[1]。这些工作的完成依赖良好的天气条件,如果在恶劣天气下,传统农机无法进入农田,这些繁琐的步骤就只能依靠人工完成,如果种植面积过大,会导致劳动工作者的劳动强度加大,劳动周期增长,劳动成本提高。
针对目前市场上此类农机存在的部分问题,提出的解决方案如下:
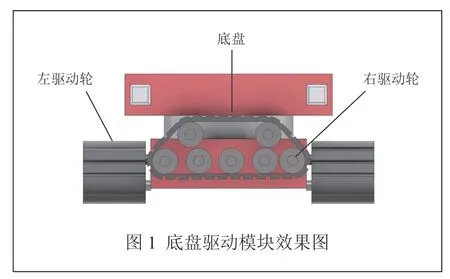
(1)对于恶劣天气下传统农机进入农田后作业困难的情况,本文研究出万向可升降式履带驱动系统,旋转轴可以使上部分机身旋转到任意角度,进行针对式作业。底盘由4 个可升降履带和可旋转轴组成,效果图如图1 所示,可升降式驱动履带通过升降机控制其升降,进而来控制其行进方向。由于其独特的驱动方式,可以很大程度地解决传统农机进入农田后收获难的问题。
(2)研究设计的新型农机采用新型6061 铝合金材料制成,以达到减重的目的,这样可以减小压强,降低对农田的损害。农机的设计图与各个模块介绍如图2 所示。泥土分离模块根据含泥量的大小采用分级除泥;中枢控制系统控制整个装置的运行;储水装置用于储藏除泥时所需要的水;驱动模块由主动轮驱动履带运转;果秧分离系统把果实与秧分离开来并进行清选工作;果实贮藏装置用于贮藏收获的果实。

(3)针对果实上附着的泥土无法用传统农机清除,只能依靠人工后期工作的问题,设计了除泥装置。
人工除泥不仅增大了劳动者的工作强度,而且降低了生产效率。本文设计的除泥系统很好地解决了在恶劣天气条件下果实除泥只能依靠人工的问题。果秧犁出后,通过传送带进入泥土处理装置,通过传感器检测重力的大小从而发出信号,进而控制两侧出水口出水量的大小,通过水把果秧上的泥土除去,然后水经过漏网集中处理进入回收仓,果秧进入风选机进行吹干处理,最后进入喂料口继续进行果秧分离处理。除泥装置设计图如图3 所示。

2 果实收获农机的仿真分析
农机设计由无人驾驶系统、果秧传送系统、万向驱动系统、分级除泥系统、外传感器系统等组成。首先,通过外传感器检测外部环境信息后进行分析[2];然后发送信息到控制中心;控制中心分析数据发送指令,驱动整个系统进行协同配合作业;最终实现果实的完整收获[3]。本文主要对农机的果秧除泥系统、万向驱动系统进行仿真分析。
2.1 果秧除泥系统仿真
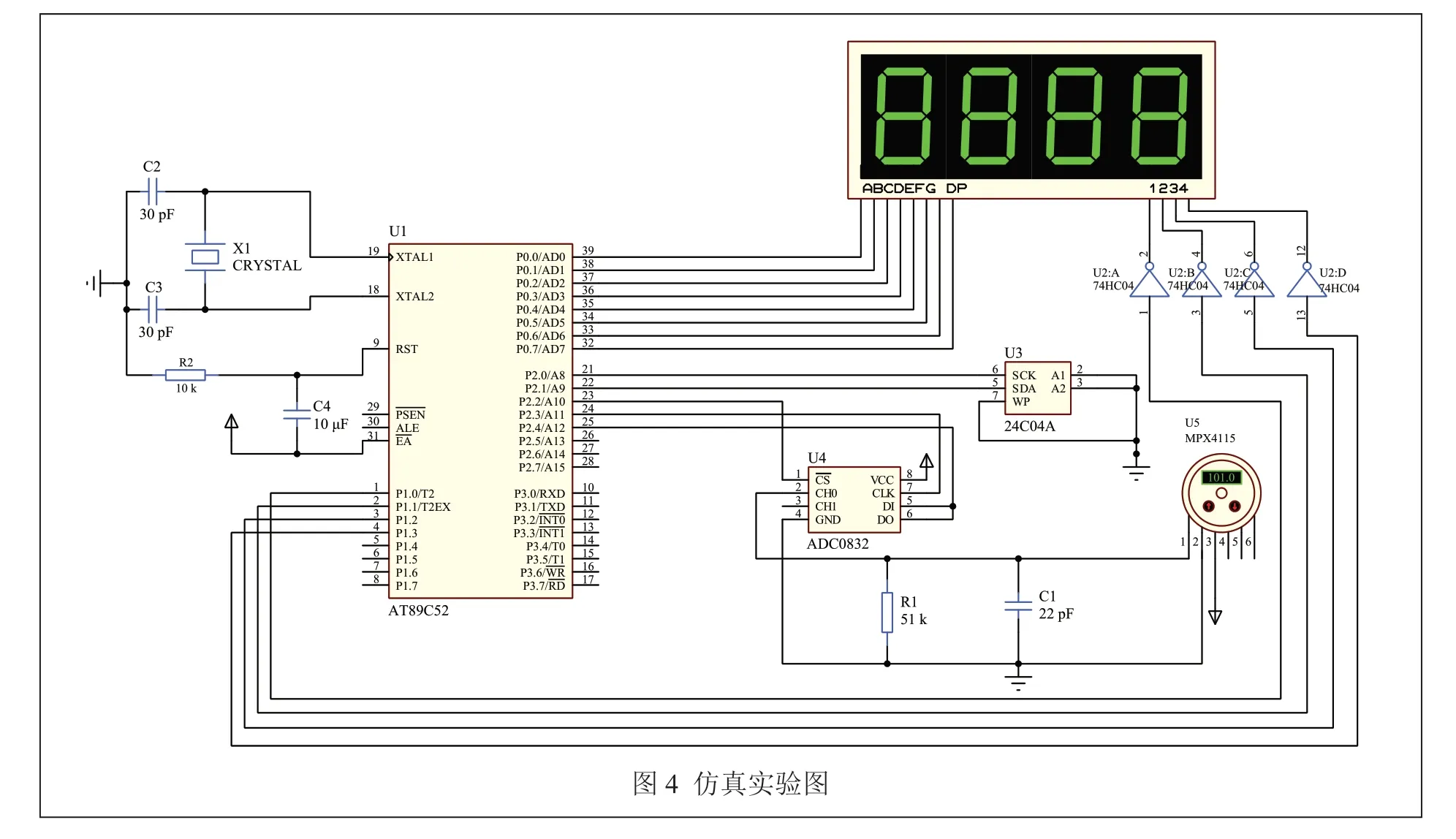
果秧被犁出土地后,进入传送带进行除泥处理。以花生的收获为例,花生秧进入传送带后,除泥装置开始进行作业,果秧上不同的含泥量具有不同的重量,不同的重量需要不同的水量用于除泥[4]。基于此,果秧除泥系统运用Proteus 仿真软件,采用mpx4115 压力传感器与stc89c51 单片机结合仿真(如图4 所示),对其输入不同大小的压力值,经由数码管显示出来力的大小;然后把信号反馈给51 单片机,51 单片机通过处理,通过输出高低电平信号控制电机的转动来控制水流的大小,从而做到分级除泥的操作。
不同压力条件下会有不同的反馈值,在一定的压力数值范围内设置出水阈值,一个压力区间对应一个出水量,超出这个区间,进入下一个出水量,这样做是为了解决花生除泥不彻底或者是水流过大对于花生果实造成伤害的问题。压力区间通过具体实验测出并规定。实验数据如表1 所示。

表1 实验数据表
2.2 万向驱动系统仿真分析
本文设计的万向驱动系统是将传统农机两侧轮式驱动设计,改变为四履带式设计,通过升降器改变其驱动履带的选择,然后通过转向器使机器自身到达目标方向。
根据所设计的车重预估,加之所储存的果实,机械最大承重为5 t。仿真出最大承重为5 t 时,万向驱动系统的应力实验测试结果如图5 至图9 所示。



底盘应力测试数据图如图5 所示。采用Inventor软件模拟仿真底盘的最大应力测试,用来测试最大承重量,左边轴从下到上的压强变化表示底盘表面从0 N 到50,000 N 的受力变化情况(根据压强计算公式:P=F/S)。
图6 所示为底盘上施加从0~50,000 N 的力时,底盘x轴方向上下陷距离的大小,最大下陷距离为0.003437 mm。
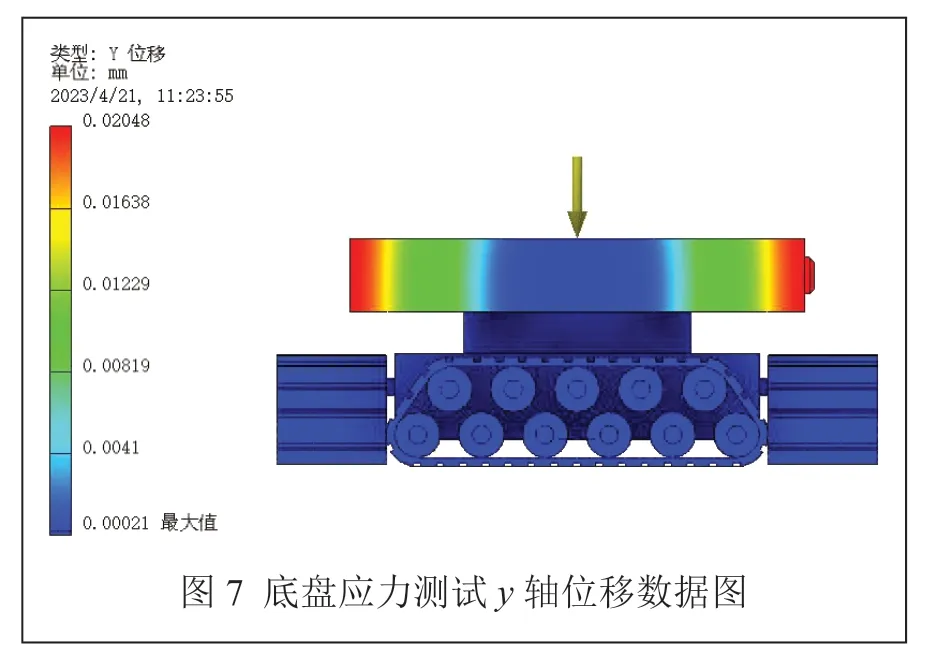
图7 所示为底盘上施加从0~50,000 N 的力时,底盘y轴方向上下陷距离的大小,最大下陷距离为0.02048 mm。
图8 所示为底盘上施加从0~50,000 N 的力时,底盘z轴方向上下陷距离的大小,最大下陷距离为0.001631 mm(考虑整个车身的载重大小)。
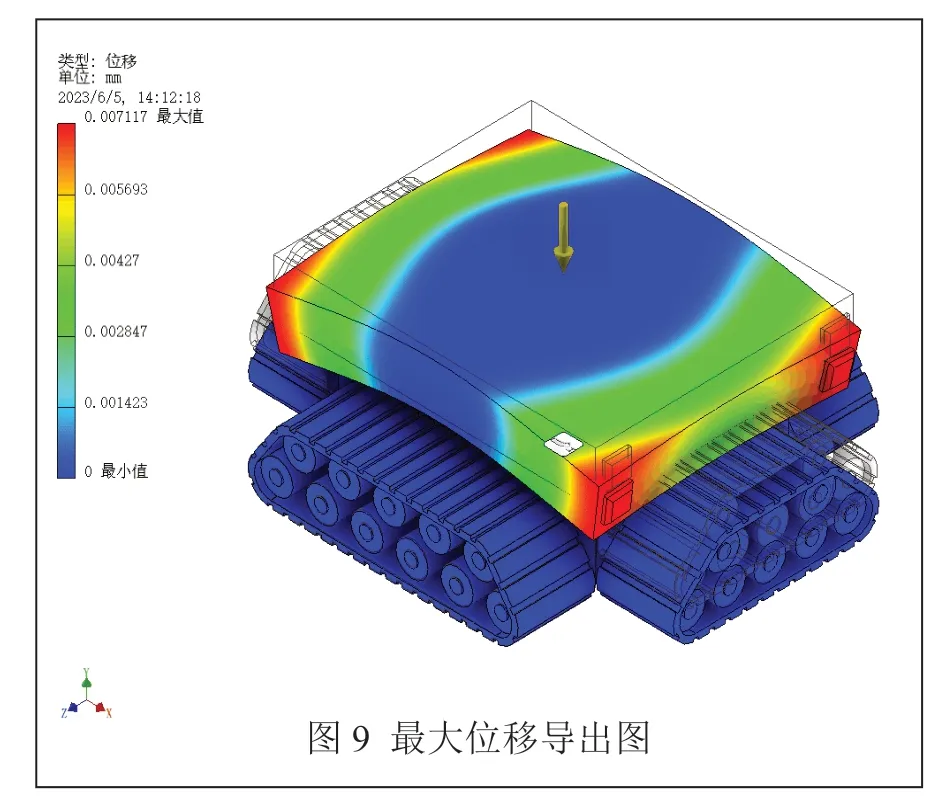
最大位移导出图如图9 所示,在底盘承受最大力时的临界承受位移变化为0.007117 mm。
仿真测试结果表明:由实验数据证明得出机器的最大承受重量为5 t,在此重量范围内,机器可以正常运作,实施作业。
3 地下果实收获机的解决方案
针对在恶劣天气条件下,传统农机无法进入农田作业的问题,提出解决方案如下:相比传统轮式农机,采用宽体履带式的设计,在相同的质量条件下,接触面的面积越大,相应的单位面积的压强越小,车辆不易丧失机动性,而且,相较于4 轮车辆,改装为履带带动后,可增加其抓地力,这样可以避免农机陷入农田中。在此基础上,采用4 条履带,通过可升降操作,决定其相应的2 条平行的履带行驶,这样可以避免机器转向对农田的伤害,而且操作室可以通过轴旋转控制其工作的方向;同时,车身材质选用较轻的合金材料。综上,该方案可以解决在恶劣天气条件下无法进入农田作业的问题。
4 结束语
由于目前市场上存在的农机产品很难在恶劣天气条件下作业,收获如花生这类作物大部分需要依靠人工,这样会造成劳动者工作内容繁琐,任务加剧,耗费大量的人力、物力。所设计的新型农机产品,由于其独特的驱动方式和通过新材料减轻车身自身重量的特点,使其可以在恶劣天气条件下正常作业,除此之外,多级除泥系统可以解决花生上的泥土覆盖问题,从而降低了劳动者的工作强度。
经过仿真分析,农机的万向驱动系统在承受自重及作物的共同重量后,受到的最大等效应力为4.526 MPa,最大竖直位移为0.007 mm,采用的6061 铝合金材质的受压屈服强度为55.2 MPa,符合材质的安全强度。本农机设计的缺点在于,由于技术和材料的原因会导致制造成本偏高。当前,由于作者专业知识技术的限制,导致农机的部分技术暂时没有实现,如无人驾驶技术,需要后期的不断完善和学习。
