基于COOT算法的局部阴影下光伏阵列MPPT控制研究
2023-08-24张曦高昕
张曦 高昕

摘 要:针对光伏阵列在局部阴影下会产生多个功率峰值,可能出现跟踪到错误的功率峰值的情况,将白冠鸡优化算法(COOT)应用于局部阴影MPPT控制,通过动态调整太阳能电池板输出电压和电流,使得太阳能电池板的输出功率最大,从而提高太阳能电池板的转换效率和输出功率。结果表明,不论是在静态还是动态阴影条件下,采用白冠鸡优化算法都能准确定位到最大功率峰值点。
关键词:白冠鸡优化算法(COOT);局部阴影;MPPT;最大功率
中图分类号:TM615 文献标志码:A 文章编号:1671-0797(2023)16-0013-04
DOI:10.19514/j.cnki.cn32-1628/tm.2023.16.004
0 引言
太阳能作为可再生能源,具有污染小、储量充足和低成本的优势,而光伏发电是高效利用太阳能领域最具发展潜能的技术,正逐步成为世界能源体系建设的重要一环[1]。
光伏发电输出随多个因素变化而波动,无法提供恒定的电能,易造成供电不稳定[2]。在动、静态局部阴影情况下,光伏阵列输出的P-U曲线呈多峰特点,难以定位到全局最大功率点,追踪控制效果不佳,将使光伏阵列输出效率大幅降低[3]。
传统MPPT算法对于遮光光伏板的特殊情况处理不够充分,电导增量法需要反复多次迭代计算,计算量大,耗时长;扰动观察法需要对于峰值位置和幅值进行判断,受到干扰的概率较大,容易出现误差较大的情况。
因此,已有研究对于局部阴影下最大功率点提出了多种优化算法进行追踪控制。
文献[4]提出改进灰狼优化算法对于局部阴影MPPT进行优化,具有较快的速度和较高的精度。
文献[5]利用双PSO算法对光伏输出曲线进行推导,减小了运算量和搜索范围,提升了收敛速度。
文献[6]将多种群遗传算法与扰动观察法相结合,保证系统稳定工作在最大功率点。
本文采用白冠鸡优化算法(COOT)进行MPPT控制,并用MATLAB/Simulink进行建模分析,结果表明,该算法不论是在静态还是动态局部阴影情况下,都能准确追踪到最大功率值,具有较好的适用性。
1 光伏阵列模型与输出特性
1.1 光伏阵列数学模型
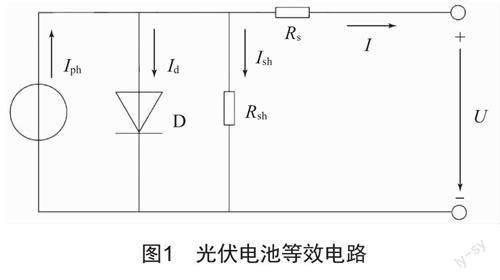
图1中光生电流Iph分为三部分:二极管D电流Id、并联电阻Rsh电流Ish以及串联电阻Rs的输出电流I。
(1)
式中:I0为反向饱和电流;q为基本电荷;U为光伏阵列输出电压;A为二极管特性因子;k为玻耳兹曼常数;T为温度。
1.2 局部阴影
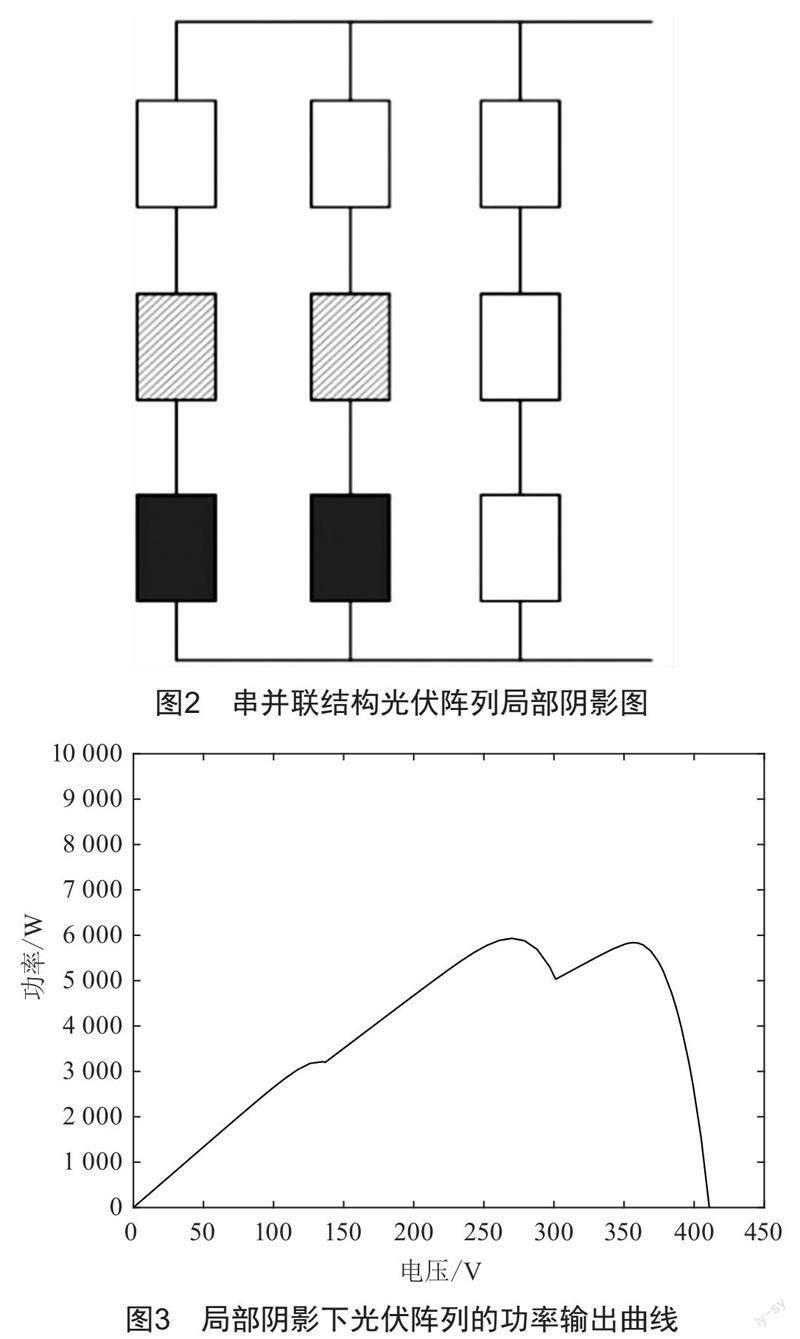
光伏阵列部分阴影出现多个功率峰值的原因主要是阴影会影响光伏电池的输出电流和电压。具体来说,当光伏阵列的一部分在阴影下时,这部分光伏电池输出的电流和电压会下降,而无阴影的光伏电池输出的电流和电压保持不变,使得光伏阵列中不同位置的光伏电池输出的功率不同,从而导致多个功率峰值的出现。
本文以串并联结构为目标进行研究,在图2所示的局部阴影情况下,光伏阵列输出功率特性如图3所示。
局部阴影导致的多峰值特性,会影响传统MPPT方法追踪最大功率点时的准确性,造成定位在错误的局部最优值的情况。如果MPPT控制采用常规的算法,只会跟踪一个功率峰值,在阴影条件下,可能会跟踪到错误的功率峰值,导致系统效率降低,而且可能会加速光伏电池的老化。传统MPPT算法的稳定性较差,容易受到环境温度、辐照度等因素的影响,导致误差较大,不能实现快速跟踪最大功率点,反应速度较慢,难以适应动态变化的光照条件。
2 白冠鸡优化算法原理及应用
2.1 原理
白冠鸡优化算法是一种基于自然进化的全局优化算法。在部分遮光MPPT控制中,白冠鸡算法的基本原理如下。
1)个体随机移动。
在种群初始化后,考虑到随机移动这一行为,首先选定了一个随机位置作为参照:
Q=rand(1,d)·(Ub-Ib)+Ib (2)
式中:Ub、Ib分别为搜索空间的上、下限。
随机运动使得算法能够对搜索空间进行充分的探索,因此如果算法陷入局部最优,这种行为将帮助算法及时跳出。个体的新位置更新方式为:
CootPos(i)=CootPos(i)+A·R2·[Q-CootPos(i)](3)
R2为[0,1]内一随机值,A的更新方式为:
(4)
式中:L为当前迭代次数;Iter为最大迭代次数。
2)链式运动。
使用两个体的平均位置来执行链运动:
CootPos(i)=0.5[CootPos(i-1)+CootPos(i)] (5)
3)根据组长调整位置。
通常情况下,种群由种群前面的几个白冠鸡领导,其他白冠鸡必须根据小组领导调整位置并向它们移动。利用机制K来控制位置引导作用:
K=1+(iMODNL) (6)
式中:K为与个体i对应的雞的序号;i为当前个体的序号;NL为白冠鸡的数量。
于是个体的位置更新如下:
CootPos(i)=LeaderPos(k)+2R1·cos(2Rπ)·
[LeaderPos(k)-CootPos(i)] (7)
式中:LeaderPos(k)为领导鸡k的位置;R1为[0,1]内一随机数;R为[-1,1]内一随机数。
4)由组长带领种群走向最佳位置。
团队必须朝着一个目标(最佳区域)前进,因此领导者需要更新它们对目标的位置。具体更新方式如下:
LeaderPos(i)=
BR3cos(2Rπ)[gBest-LeaderPos(i)]+gBest,R4<0.5BR3cos(2Rπ)[gBest-LeaderPos(i)]-gBest,else (8)
式中:gBest为种群内最优个体的位置;R3、R4均为[0,1]内的随机数;R为[-1,1]内的随机数。
B的计算方式为:
B=2-L (9)
2.2 应用
1)初始化:白冠鸡算法通过随机产生一群个体作为初始种群,每个个体代表一种控制策略。每个个体都由一组参数向量表示。
2)适应度评价:对于每个个体,通过计算其对应的MPPT值来评估其适应度。适应度值越高,说明该个体的控制策略越优。
3)选择操作:依据适应度大小对种群中的个体进行选择,优秀个体将被选中进行交叉和变异。
4)交叉操作:通过交换两个个体的参数产生新的个体,以期望获得更好的控制策略。
5)变异操作:随机选取一个个体的某个参数,并按照一定规律进行变异,产生新的个体。
6)终止条件:当达到设定的最大迭代次数或者适应度值达到一定阈值时,算法停止运行。
7)最优解输出:在停止运行后,从所有个体中选出适应度最高的个体作为MPPT控制器的最优解。
通过不断迭代种群,白冠鸡算法能够找到适应度最高的控制策略,从而实现在部分遮光条件下对光伏电池最大功率点的追踪控制。
3 仿真结果及分析
在MATLAB/Simulink中进行建模,光伏阵列由5个电池组串联,每个光伏电池组由2个小光伏电池串联、4个小光伏电池并联组成。光伏电池温度设置为标准条件下25 ℃,MPPT采样光伏电池输出的电压和电流,经过白冠鸡算法计算输出占空比、迭代次数和粒子位置,输出占空比经过PWM发生器来控制开关管。
PV1~PV5的光照强度在0~5 s时分别为1 000、1 000、500、800、800 W/m2;在5 s时光照强度突变为1 000、1 000、600、900、900 W/m2。由图4可知,光伏阵列的输出功率是非线性的,但总是存在一个最大功率点,在0~5 s时最大功率约为7 102.95 W,5~10 s时最大功率约为7 873.78 W。
图5为光伏阵列实际输出功率,图6、图7为光伏阵列输出电压、输出电流,由图可知,光伏阵列总是能在迭代后输出理论上的最大功率值,并且依旧能维持稳定的输出电压和电流,提高了系统运行的稳定性和能源利用的高效性。
图8为群体输出位置,初始化群体数量为20,随着迭代次数的增加,群体的位置也趋于一致,迭代16次后输出最优解,光伏电池输出功率与理论最大功率基本吻合。
4 结论
本文通过仿真验证了白冠鸡优化算法在局部阴影下光伏阵列MPPT控制中的有效性,在光照条件变化时,能够适应光照强度和环境变化引起的光伏板的多峰值现象,适用于光照条件动态变化时的最大功率点跟踪。同时,该算法具有计算速度快、收敛速度快的特点,能够快速跟踪光伏板的最大功率点,具有较高的准确性和精度,输出功率接近光伏板的实际最大功率点,提高了光伏发电效率。
[参考文献]
[1] 杜尔顺,张宁,康重庆,等.太阳能光热发电并网运行及优化规划研究综述与展望[J].中国电机工程学报,2016,36(21):5765-5775.
[2] 黃新波,邬红霞,李民,等.影响户外光伏电源供电性能的关键因素研究[J].高压电器,2021,57(5):36-42.
[3] 吴宏泽,高昕.改进鲸鱼算法在局部阴影下的光伏阵列MPPT研究[J].佳木斯大学学报(自然科学版),2022,40(5):12-15.
[4] 毛明轩,许钊,崔立闯,等.基于改进灰狼优化算法的光伏阵列多峰MPPT研究[J].太阳能学报,2023,44(3):450-456.
[5] 卫永琴,李震,林孟涵,等.局部遮阴下双优化PSO在光伏MPPT中的应用研究[J].电源技术,2023,47(2):260-264.
[6] 吴子牛,孟润泉,韩肖清.基于改进多种群遗传算法的光伏阵列多峰值MPPT研究[J].电网与清洁能源,2022,38(8):102-109.
收稿日期:2023-04-11
作者简介:张曦(1997—),男,安徽淮南人,在读硕士研究生,研究方向:电气工程。
