穿戴式光纤光栅指套仿生触压感知性能研究
2023-08-21齐华冯艳潘睿智徐毛毛王昊祥张洪溥张华
齐华,冯艳,潘睿智,徐毛毛,王昊祥,张洪溥,张华
(1 上海工程技术大学 机械与汽车工程学院, 上海 201620)
(2 上海市大型构件智能制造机器人技术协同创新中心, 上海 201620)
0 引言
随着智能机器人的进一步发展,灵巧机器手不仅可以进行搬运、夹取等常规动作,还能进行翻转、穿针、按摩等模拟人手的一系列精细动作[1]。灵巧机器手的仿生触压感知成为了研究热点,其智能感知是关键因素之一。目前,基于压阻、电容、压电等传感原理的电信号传感器[2-4]在智能机器人中有广泛应用,但这些传统的电信号类触觉传感器普遍存在体积偏大、测试线路复杂、电磁干扰等问题,难以集成到灵巧机器手的末端执行器中。
近年来,随着光纤制备和光纤通信技术的飞速发展,光纤传感也被越来越多的人了解、研究和应用[5]。其中,光纤布拉格光栅(Fiber Bragg Grating,FBG)传感属于光纤传感领域中一个新兴的研究分支,这种传感技术相比于电类传感拥有较强的抗电磁干扰和耐腐蚀能力[6]。此外,与依据光强、相位、偏振态等参量变化原理的光纤传感器不同,光纤布拉格光栅传感器靠波长进行编码,因此它不会受光强和相位的影响,能够提高传感的稳定性,且通过串联和并联FBG 能够较好地实现分布式传感,极大地打破了环境的限制[7-9]。研究人员将FBG 作为敏感元件制作成各种功能型光纤传感器,已经广泛应用于工程、建筑、医疗等各个领域[10-12]。
通常将FBG 传感器埋入不同材料中或与各种机械构件组合成特定感知结构,实现光纤光栅传感器对各种物理变化如应变、压力、温度等的监测。WANG S X 团队[13]将光纤光栅传感器与手术机器人末端的细长外科器械结合,设计了一种可以进行组织触诊的力传感器,实现了良好的轴向线性力-变形关系和较高分辨率。MASSAR L 团队[14]将一根光纤布拉格光栅嵌入刚性手上的软聚合物材料中,通过完成在各种条件下抓取不同物体的多项任务,可检测被操作对象的大小和刚度,其中触觉反馈是通过集成在机械手指尖的传感器来传达。PARK Y L 团队[15]基于节肢动物外骨骼仿生思想,将FBG 引入复合机器人末端执行器,用于精确的力传感和接触位置的估计,最小检测力可达到0.02 N,实际力测量分辨率能到0.15 N。JIANG L 团队[16]设计了一种光纤传感机械手,刚性结构中的FBG 用于检测施加于手的精确力,软材料中的FBG 提供关于接触点位置的信息,结合刚性和软材料,实现了力触觉传感。许会超等[17]利用光纤光栅的分布式传感特性,将FBG 阵列与聚二甲基硅氧烷(Polydimethylsiloxane, PDMS)基底材料结合构成柔性传感元件,研究了机器人柔性触觉的可行性。王雅纯团队[18]基于FBG 设计了一种桥型结构的微型传感器,该结构可将施加的外力转变为轴向力,用于假手指尖的力触觉感知。利用FBG 传感器可以提高机器人触觉传感的灵敏度、线性度、重复度,且相对电传感器不受电磁干扰,但在已有机器手触觉感知研究中,大多传感单元都存在结构复杂、难以在手部集成的问题。在服务业、医疗等更生活化的领域里,尤其在按摩机器人领域,学者针对机械结构和按摩手法进行大量分析研究,与按摩师相比,按摩机器手缺乏仿生触压感知能力。
本文以光纤布拉格光栅传感技术为基础,设计了一种结构简单且可穿戴的指套,对三个不同位置的触压感知性能进行了深入的研究,进行硬度感知辨别实验,并将标准触压波深比作为该触压指套的硬度感知量化表征参数,验证指套触压感知性能。
1 FBG 传感器原理
光纤布拉格光栅利用光纤材料的光敏特性能够形成折射率的永久变化,通过相位掩膜法或者全息干涉法把一小段光敏感的光纤暴露在光强周期分布的光波下,在纤芯内形成折射率周期变化的空间相位光栅[19]。当外界压力和应变发生变化时,光栅周期会发生变化并且产生弹光效应;当温度发生变化时,会产生热膨胀效应和热光效应[20-21]。FBG 传感原理就是当光栅受到外界温度和力作用时,光纤的变化使光栅周期和纤芯有效折射率产生变化,最终导致布拉格波长发生偏移,即FBG 传感器可以选择波长的大小,如图1(a)所示,只有布拉格中心波长的光波会被反射回去,并在图1(b)反射谱上产生波峰[22]。

图1 FBG 的光传输特性Fig. 1 Optical transport characteristics of the FBG
布拉格中心波长需要满足[23]
式中,λB表示中心波长,neff表示纤芯有效折射率,Λ表示光纤光栅的周期。
根据FBG 传感原理,中心波长的偏移量计算公式为[24]
式中,ΔλB表示中心波长偏移量,k=1-Pe表示应变灵敏度系数,Pe表示有效弹光系数,Δεz表示应力作用下引起的纵向应变变化量,α表示热膨胀系数,ξ表示热光系数,ΔT表示温度变化量。
首先选择合适的光纤,对于普通石英光纤,当只受均匀轴向应力时,中心波长1 550 nm 的FBG 轴向应变灵敏度系数k1=0.784,中心波长变化量与应变之间的线性系数为1.22 pm/με。当只受均匀横向应力作用时,中心波长1 550 nm 的FBG 横向应变灵敏度系数k2=1.726,中心波长变化量与应变之间的线性系数为2.675 pm/με。可知,横向应力作用下的灵敏度值大,但实际上在相同应力下,横向应力产生的纵向应变比轴向应力引起的纵向应变要小,横向应力引起的纵向应变如式(3)所示,其中的∓表示横向压应力引起纵向正应变,横向拉应力引起纵向负应变。因此,在横向应力P作用下,FBG 中心波长的变化量如式(4)所示,式中E为材料弹性模量。
因此,当FBG 受到横向压应力作用时,采用压应力灵敏度系数来确定最终灵敏度,纵向应力灵敏度为0.784/E,横向应力灵敏度为0.587/E。因此,在横向力作用下,取中心波长变化量与应变之间的线性系数为0.913 pm/με。因此将光纤光栅合理地嵌入经过设计的指套模型中,根据光纤的传感特性能够在指套受到挤压时反映相应触压点的各种变化包括物理变化,例如应变、压力等。
2 指套模型整体设计
拇指指套为两段式,均采用圆柱形设计,指套指尖外表面由曲面和平面组成,曲面可以更好贴合拇指形状,平面设计基于触压时的稳定性考虑,同时便于理论分析。在指套的端部处设计有起到连接作用的圆柱卡销,指套能够贴合拇指并转动一定的角度,圆柱卡销凸起设计可以保证连接紧密,不易掉落。具体指套整体结构如图2 所示,其受力分析如图3 所示。
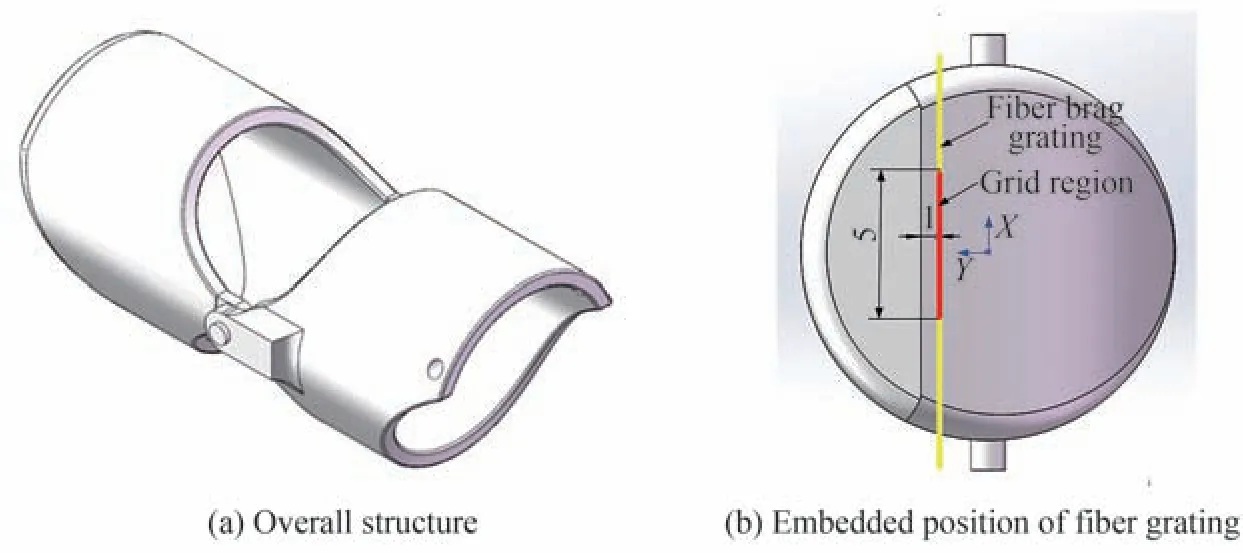
图2 拇指指套模型Fig. 2 Thumb′s fingerstall model
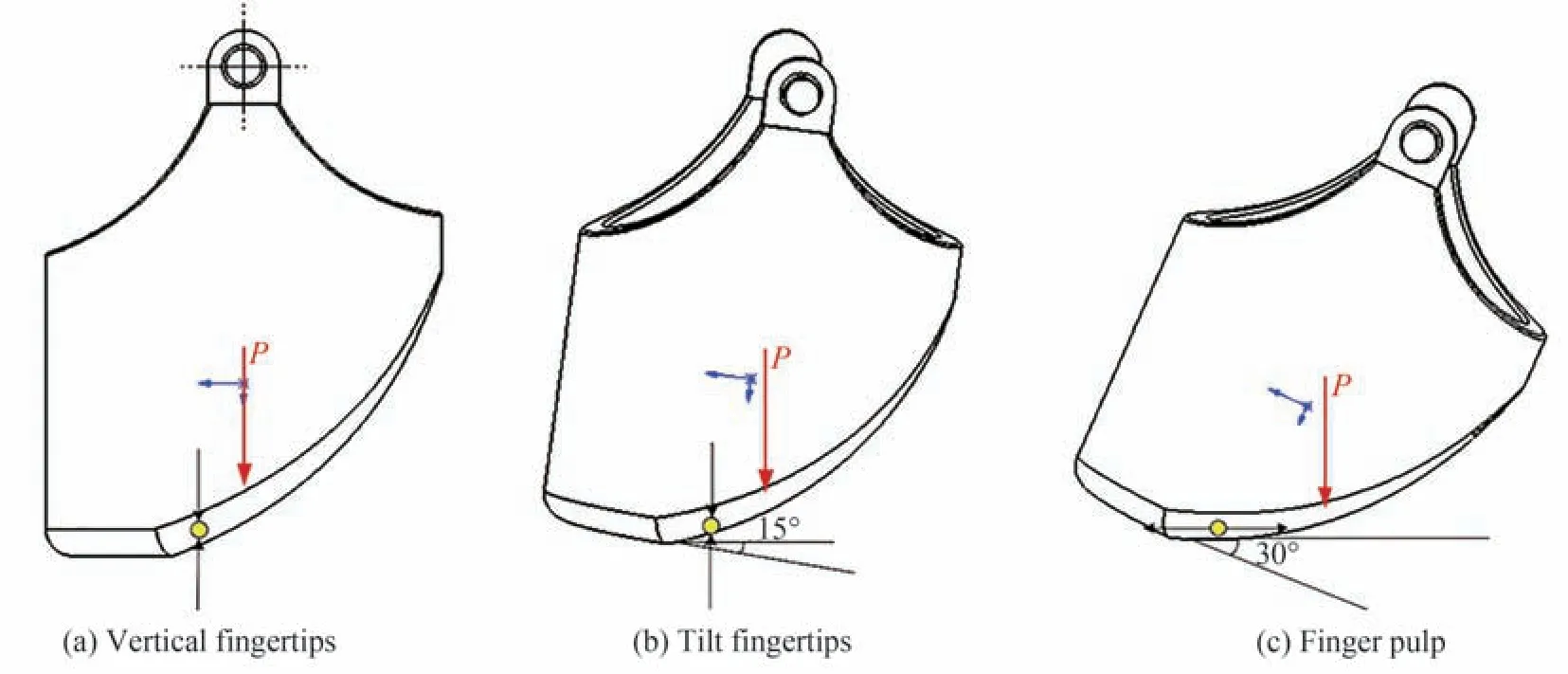
图3 不同位置施压FBG 受力示意图Fig. 3 Schematic diagram of the FBG force under pressure at different positions
选择光纤光栅中心波长为1 550 nm,栅区长度5 mm。在指套的曲面外壳,距指尖平面1 mm 处沿着中心线均匀地凿刻出一段线槽,将光纤仔细地贴合线槽埋入其中并用胶水将光纤前段与末端粘贴好,如图2(b)所示。当指尖受到触压力时,光纤光栅主要横向受压,由式(3)可知,FBG 产生轴向拉应变,中心波长增大;当指腹施加力时,光纤光栅主要横向受拉,中心波长减小。此外,选择拇指指套的3D 打印材料为树脂白料,该材料表面光滑,韧性比较好,精度较高,可细致地表现连接圆柱卡销等设计。不同材料在相同压力下触压变形及产生的应变不同,其中材料的弹性模量对应变影响较大。由式(4)可知,随着弹性模量的增大,相同应力下的应变也越小,传感灵敏度会变小,树脂白料的弹性模量在2~3 GPa,适合小范围力触压。
3 触压感知仿真分析
首先将3D 模型导入仿真软件ANSYS Workbench 界面中,选择感知单元的材料为树脂白料,所以在有限元仿真分析过程中,设置仿真材料参数杨氏模量E=2 450 MPa,泊松比μ=0.40,密度ρ=1.13 g/cm3。然后进行如下操作:
1)网格划分。网格划分的细密程度会直接影响仿真结果的收敛性和准确性[25],因此通过Mesh tool 对整个指套模型进行自由网格划分的同时设置划分网格大小为0.5 mm。
2)施加力和约束。根据实际作用环境条件选择合适的力加载面和力方向,并选择合适的感知单元约束面,如图4(a)。
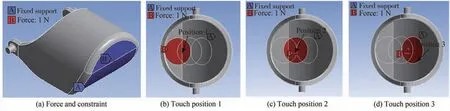
图4 拇指触压感知单元约束与受力Fig. 4 Constraint and force of the thumb touch pressure sensing unit
对拇指指套感知单元的不同位置进行触压力加载,如图4(b)~(d)所示,位置1、位置2、和位置3 依次模拟拇指在指套内施加力的三个位置:垂直指尖、倾斜15°指尖、倾斜30°指腹。每个位置依次从1 N 加载到10 N,加载范围为圆柱触压杆(半径5 mm)触压的模拟接触区域。当在位置1、位置2 和位置3 触压时,指套传感单元FBG 应变仿真结果示意如图5。
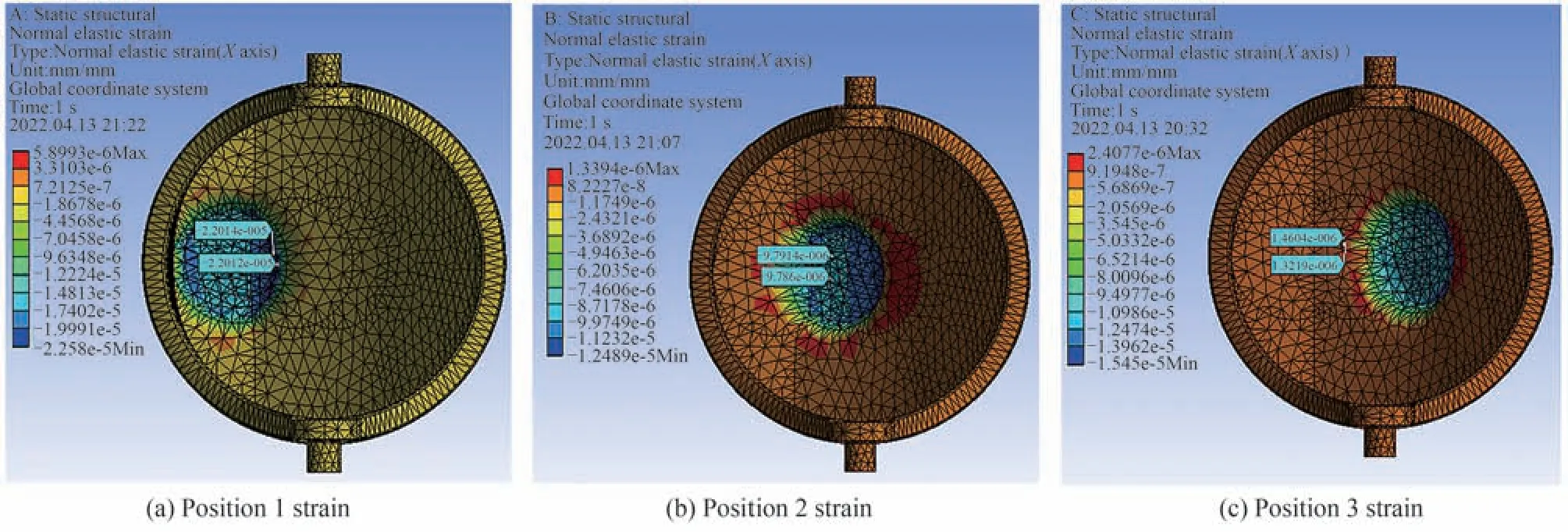
图5 拇指传感单元FBG 应变仿真示意图Fig. 5 Schematic diagram of the FBG strain simulation of the thumb sensing unit
对指套的三个触压位置加载的应变仿真如图6 所示。当拇指指套位置1 受到触压时,应变灵敏度为K1=-22.013 0 με/N;位置2 受到触压时,应变灵敏度为K2=-9.778 7 με/N;位置3 受到触压时,应变灵敏度为K3=1.391 2 με/N。仿真分析结果表明,应变与触压力成线性关系,当触压力相同,位置1、2 处产生压应变,位置3 处产生拉应变。
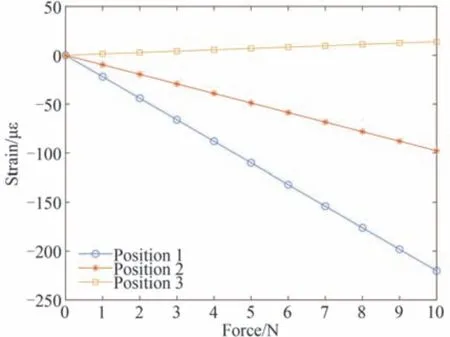
图6 不同位置应变随应力的变化Fig. 6 Variations of strain with stress at different positions
由式(3)、(4)可知,在横向压应力作用下,中心波长增大。当FBG 的中心波长为1 550 nm 时,仿真波长偏移量与应变之间的线性系数为0.913 pm/με。该拇指指套在位置1、2、3 处受到触压时,中心波长随应力变化的仿真结果如图7 所示。拇指指套在位置1、2、3 处对应的FBG 中心波长灵敏度分别为20.097 9 pm/N、8.928 0 pm/N、−1.270 2 pm/N。
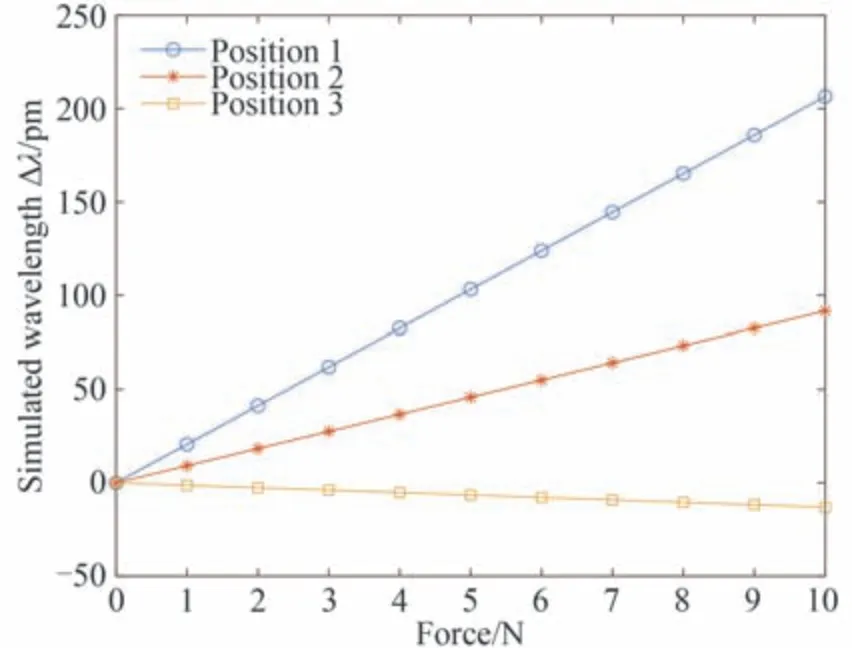
图7 不同位置仿真波长随应力的变化Fig. 7 Variations of simulated wavelength with stress at different positions
4 触压力感知实验研究与分析
4.1 实验装置
实验中,拇指指套实物由3D 打印机打印,选择打印材料为树脂白料,打印实物如图8(a)。主要实验设备包括微机控制电子万能试验机(C65.102)和光纤光栅解调装置(HB-FBG-1000),如图8(b)所示。
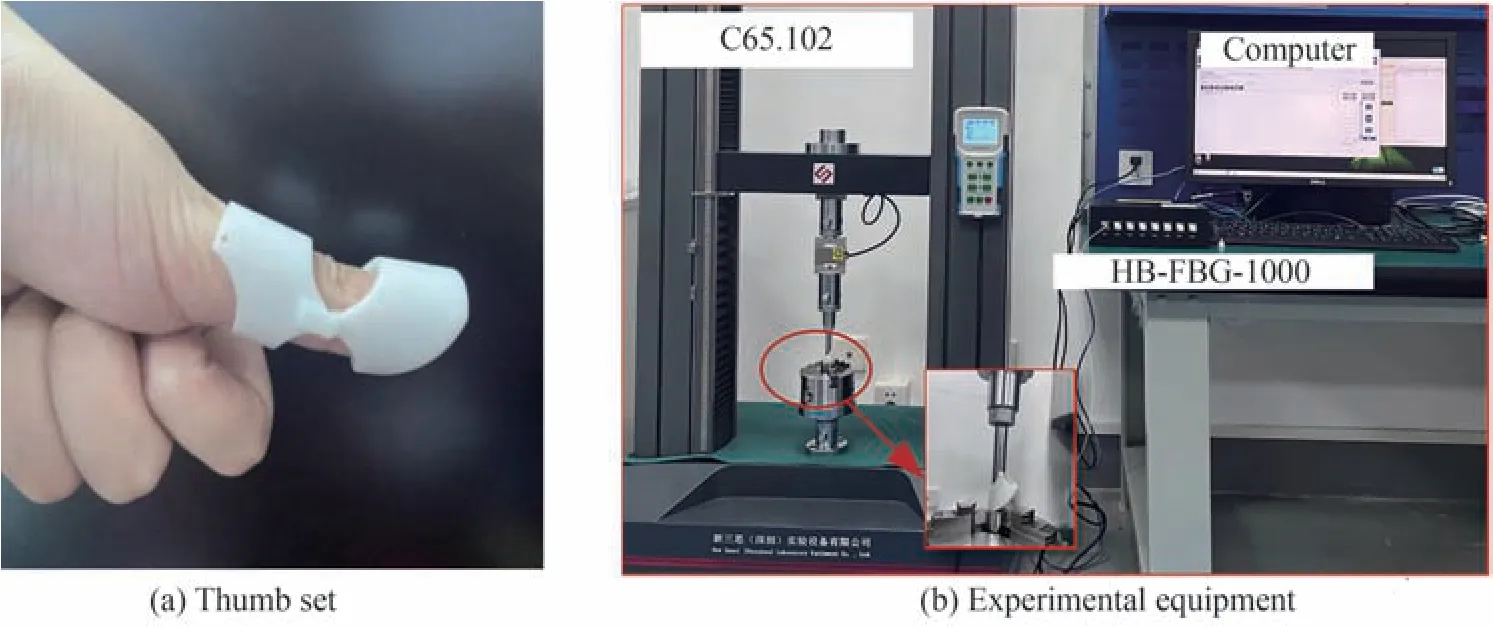
图8 触压感知实验装置Fig. 8 Touch and pressure sensing experimental device
4.2 触压力感知实验研究
标定拇指指套FBG 的初始中心波长值为1 549.627 nm,为了消除温度对中心波长的影响,使环境温度保持25 ℃。分别进行拇指的指尖和指腹触压感知实验,使用电子万能试验机连续从0 N 加载到10 N,每增加1 N 设定力保载25 s。
选取图4 中对应的触压位置进行加载实验,加载力(F)量程为0~10 N,设定间隔1 N。分别对每个加载位置重复做三次实验,记录在此过程中的中心波长值,为减小实验误差,计算每一阶梯的平均值并将其作为最终实验数据,分别得到FBG 在位置1、位置2 和位置3 三次重复实验的FBG 中心波长变化,如图9 所示。

图9 触压实验不同位置中心波长Fig. 9 Center wavelengths at different positions of the touch experiment
如图9(a)所示,当在触压位置1 处进行力加载时,FBG 的中心波长会增加。将实验得到的FBG 平均波长值通过Matlab 进行线性拟合,三次实验线性相关系数分别为0.999 5、0.999 5、0.999 6,感知灵敏度a11=22.316 4 pm/N、a12=24.036 0 pm/N、a13=26.005 5 pm/N。
如图9(b)所示,当在触压位置2 处进行力加载时,FBG 的中心波长也会增加。将实验得到的平均FBG波长值通过Matlab 进行线性拟合,三次实验线性相关系数分别为0.996 7、0.997 0、0.998 4,感知灵敏度a21=9.586 2 pm/N、a22=10.529 3 pm/N、a23=10.899 5 pm/N。
如图9(c)所示,当在触压位置3 处进行力加载时,FBG 的中心波长会减小。将实验得到的平均FBG 波长值通过Matlab 进行线性拟合,三次实验线性相关系数分别为0.999 5、0.997 4、0.999 0,感知灵敏度a31=−1.537 1 pm/N、a32=−1.587 6 pm/N、a33=−1.617 3 pm/N。
加载位置不同所对应的FBG 中心波长数据也不同,其中在垂直指尖位置1 和倾斜指尖位置2 加载时,FBG 主要在横向受压,所以中心波长都往增大的方向变化,但很明显在垂直指尖位置1 处变化较大。而在指腹位置3 进行加载时,FBG 受力状态发生变化,主要在横向受拉,所以中心波长会减小,与位置1、位置2 中心波长变化正好相反。此外,三组的三次实验结果重复性误差分别为13.14%、13.58%、10.11%,原因有两方面,一方面是在实验过程中,每次触压指套的位置不能保证完全一致,会发生微小的变化,另一方面是设备电子万能试验机触压时力存在轻微波动,也会导致中心波长的变化。
分别将三组的三次实验结果进行处理,得到位置1 处的平均灵敏度值a1=24.119 6 pm/N,位置2 处的平均灵敏度值a2=10.338 3 pm/N,位置3 处的平均灵敏度值a3=−1.580 7 pm/N,其中|a1|>|a2|>|a3|,且线性度都在99%以上,有限元仿真值分别为20.097 9 pm/N、8.928 0 pm/N、−1.270 2 pm/N,实际实验值与仿真值的相对误差分别为16.67%、13.64%、19.64%。利用ANSYS 软件仿真所得数据与实验预期相符,虽然存在一定的误差,但这与3d 打印的精度和FBG 的封装条件有很大的关系。
5 触压硬度感知实验研究与分析
对三个触压位置进行多次触压感知实验发现,不同位置触压相同物体时,波长变化规律和实验相符。在位置1 即垂直指尖处触压,会更方便、易操作,因此选择触压位置1 进行硬度辨别感知实验研究。
5.1 触压材料与触压方式选择
主要对小硬度物体辨别感知进行实验研究,选择一种具有不同硬度的食品级硅胶作为触压材料,该硅胶拉伸强度高、韧性好、抗撕拉性好,且耐高温,最高工作温度可达到300 ℃。硅胶的用途广泛,不同硬度硅胶可制作出各种模具。硅胶硬度通过人手触碰硅胶来反馈表达其柔软度,一般用标准邵氏硬度A 去衡量,单位为度(HA)。实验选择0 度、10 度、20 度、40 度四种不同硬度的硅胶作为触压材料,通过3D 打印模具,使用不同硬度的硅胶剂将它们调制成尺寸相同的圆柱形硅胶块。依据人体主观触觉感知它们有明显的硬度特征如表1 所示。
实验设备仍采用微机控制电子万能试验机(C65.102),选择位移固定加载,即保持相同的触压深度。进行硬度感知标定实验之前,确定位移固定加载过程中的两个参数变量,触压速度和触压深度。综合衡量触压时间和触压安全因素,过快或过慢的速度都不适合,同时在触压过硬物体时有一定的时间缓冲,起到保护作用,选择触压速度为60 mm/min。已知试验机量程为0~50 N,以最大硬度40 度硅胶块为例,当触压超过5 mm 时,试验机会发生保护机制,因此设定最大触压深度为5 mm。以略柔软10 度硅胶块为例,中等加载速度为60 mm/min,从深度0 mm 逐步增加至5 mm,每增加1 mm 保持20 s,记录此过程下的数据。如图10 所示,随着触压深度的增大,FBG 中心波长增大,在触压深度为5 mm 时,FBG 中心波长变化达到最大。
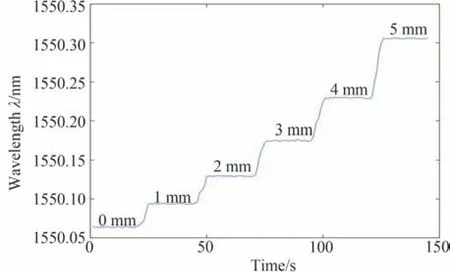
图10 硬度10 度下FBG 中心波长随时间的变化Fig. 10 Center wavelength change over time at 10 HA
5.2 触压硬度感知表征方法
如图11 可知,指套在触压硬度不同的物体时,从刚开始接触物体即触压深度为0 mm 时到最大触压深度5 mm 运动过程中,FBG 中心波长变化逐渐增大,分别对数据进行一次拟合和二次拟合后,得到二次拟合度更高。触压波深比,即触压波长与触压深度的比值会随着触压深度的增大略有增加,设定最大触压深度5 mm 为标准触压深度,对应的触压波深比为标准触压波深比,可以作为物体软硬度的感知辨别依据。其中,触压波深比计算公式为
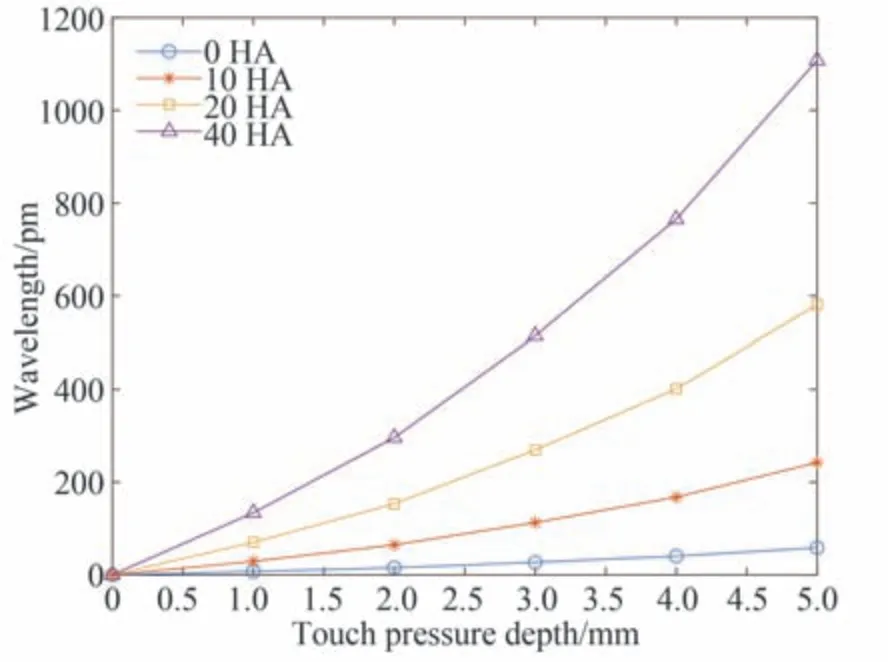
图11 中心波长随触压深度变化Fig. 11 The central wavelength changes with the depth of touch pressure
式中,k为波长触压波深比,D为触压深度,λD为触压深度D下的FBG 中心波长。标准触压波深比ks计算公式为
5.3 触压硬度感知实验研究
测试不同触压硬度下标准触压波深比,设定触压速度为60 mm/min,标准触压深度为5 mm,进行触压硬度感知测试实验。分别触压硬度为0 度、10 度、20 度、40 度的硅胶块,每种硬度重复触压6 次,图12 为实验记录的中心波长数据,纵轴为中心波长变化量,横轴分别为触压硬度和实验次数。
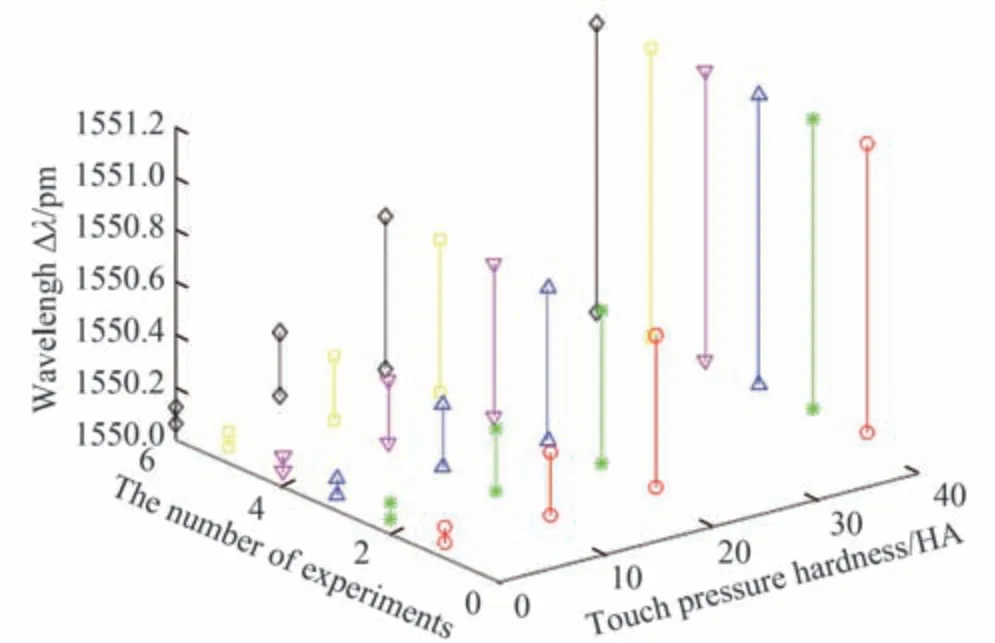
图12 不同硬度触压下中心波长数据(六次实验)Fig. 12 Data of central wavelength under different hardness touch pressure (six experiments)
将图12 数据处理后得到不同触压硬度下中心波长变化,传感指套在触压硬度为0 度、10 度、20 度、40 度的平均FBG 中心波长变化分别为58.57 pm、242.3 pm、580.95 pm、1 107.6 pm,由式(6)计算得标准触压波深比分别为11.717 pm/mm、48.46 pm/mm、116.19 pm/mm、221.52 pm/mm。根据数据结果可知,当指套触压较硬物体40 度硅胶块时,标准触压波深比最大,触压软物体0 度硅胶块时,标准触压波深比最小。四种触压硬度的标准触压波深比有较大差异,当标准触压波深比越大时,触压物体硬度越大,反之越小,可将其应用到硬度感知辨别,给人以触觉反馈。
此外,重复性误差是评估传感器在相同外界环境作用下进行多次实验时输出数据的不一致性,是衡量感知性能的一项重要静态指标。分析图13 可知,在相同触压硬度下FBG 六次实验的中心波长变化值基本保持不变,标准偏差计算公式为
式中,δ表示标准偏差,n表示重复实验次数,yi表示第i次实验测量输出值,表示测定点输出值的算术平均值。
式中,e表示重复性误差值,yFS为满量程输出值,α为置信系数,δmax为最大标准偏差。
将数据代入式(7)求出试验的标准偏差δ,如表2 所示。

表2 标准偏差Table 2 Standard deviations
由式(8)计算得出传感器的在0 度、10 度、20 度、40 度的硬度感知重复性误差分别为3.82%、0.97%、0.51%、0.29%,该传感器的硬度辨别感知重复性能较好。
6 结论
本文设计并制作了拇指触压感知指套,首先对感知结构进行有限元仿真,证实其结构的可行性。然后搭建实验平台,分别对拇指进行触压位置感知实验及硬度辨别感知实验,实验结果表明:
1) 在垂直指尖位置1 处的平均灵敏度为24.119 6 pm/N,倾斜15°指尖位置2 处的平均灵敏度为10.338 3 pm/N,倾斜30°指腹位置3 处的平均灵敏度为−1.580 7 pm/N,其线性度很好,且线性灵敏度系数都在0.99 以上。
2) 选择位置1 对四种硬度不同的硅胶触压,标准触压波深比分别为11.717 pm/mm、48.46 pm/mm、116.19 pm/mm、221.52 pm/mm,且该传感指套重复性很好。
3)根据FBG 中心波长偏移大小以及偏移方向的不同,可以分辨出不同指尖、指腹的加载位置以及加载力的大小。通过控制触压速度和深度,可以感知出四种硅胶硬度,进一步分辨出不同物体的硬度范围,给人以硬度触觉感知。
该传感结构可用于智能光纤指套的初步研究,将其应用在仿生机械手上提供触觉反馈,可识别触压力和触压角度范围,通过指尖竖直触压可以感知不同物体的硬度情况。在后续研究中,可以开展倾斜角度的硬度感知实验来进一步扩展其应用范围,此外可以通过改变FBG 埋入位置及埋入方法来提高其触压灵敏度。
