货车运动惯性荷载特性实车试验研究
2023-08-16胡昌斌童生豪
胡昌斌,林 淼,童生豪
(福州大学土木工程学院,福建,福州 350108)
在道路工程领域,目前关于车路动力相互作用研究,主要关注的是路面结构构造小尺度不平整度激励的车辆荷载,对于道路系统大尺度的道路线形、超高等几十米及以上的大构造引发的车辆动力荷载关注较少[1−5]。
基于车辆工程的动力学分析显示,道路线形起伏和平面转换会引起车辆加减速和复杂惯性运动模式,对车轮产生具有冲击特性的惯性运动荷载[6]。工程实践和车辆动力学研究显示,道路起伏[7]、弯道超高转换[8]、路面板间不平度[9]以及车辆加减速行为[10]等会引起车体惯性运动,与载重车体、高的车速、急速的制动行为相结合,将可能使车辆悬架和轮胎由于储能-释能行为产生很大的车辆运动惯性动力荷载。这种动力荷载与以往移动恒载[11−14]和随机荷载[15−20]特性显著不同。
研究显示,运动惯性荷载是车辆质量、加速度和轮胎共同综合作用的函数[21−23]。线形、车辆因素和驾驶行为诱发车辆复杂运动模式,进而通过轮胎产生具有冲击特性的运动惯性荷载。车辆因素主要包括车辆重量和车型,车型包括车辆联接方式(铰接或固结)、车厢形状、轴型和轴位。车辆重量主要通过增加车辆惯性影响荷载大小,车型会引起荷载分布差异,驾驶人员的驾驶行为(转向、制动和加减速)与人员的心理生理有关系,但主要诱因是线形起伏、平面转换和交通状况。
为合理开展车辆设计,车辆工程领域对车辆运动行为和荷载研究较为深入。对于几十米以上的车路系统大尺度激励车辆荷载特性研究,需要结合车辆系统动力学理论和实车测试技术开展。20 世纪50 年代,美国和德国学者们建立了较为完整的车辆操纵动力学线性域理论体系;1980 年汽车动力学理论日趋成熟,随着MATALAB 计算软件、ADAMS 仿真软件、CarSim 软件和TruckSim软件的开发,汽车动力学进入到新阶段,操纵动力学方程向多自由度方向发展,汽车模型更加精确细化。IELUZZI 等[24]、HOU 等[25]、YANG 等[26]、LU等[27]和任卫群等[28]基于ADAMS 软件,仿真得到了车辆对道路的动态作用力,分析了车辆载重、速度、悬架参数、悬架类型、轮胎刚度等对道路友好性的影响。道路线形对车辆运动行为和荷载的影响,可以通过货车动力学仿真软件TruckSim进行仿真[17]。
采用实车试验可以获得第一手实测数据,为理论与仿真分析研究提供数据依据。对于现场车辆动荷载的测试,目前基于车体的直接测试技术主要有基于接地压强、基于轮胎变形、基于车轴加速度测试反演、基于轮毂传感器测试的方法[15−16,29−30]。从道路角度,有现场压力传感器的测试垫MAT 方法。在国外,CEBON[31]开发了“负载测试垫”用于测试轮胎的动态荷载。BEER[32]开发了一种原型车辆路面压力传感器阵列(VRSPTA)系统,用于测量移动车轮负荷下轮胎-路面界面应力,并且可以测量垂直方向、横向方向和纵向方向上的力。
应该看到的是,数值仿真简化较多,对于计算车辆的参数标定过程复杂,在描述路面结构、实际车型和交通环境等复杂条件下的综合作用方面有局限,间接测试和基于路面的现场测试技术在连续采集、测试精度和宽动态范围测试方面对于采集复杂数据和多条道路路网大数据方面还存在困难。为克服相关困难,在车轮荷载实测技术方面出现了能够在各种严酷、宽动态范围环境下工作的多分力传感器方法,相关文献显示1969 年美国GM 通用公司研究的轮力传感器(Whittemore,1969)可以测出轮胎平面的两个相互正交力[33]。1975 年 SHOBERG 和 WALLACE[34]在 研 发 的WFT 可以测量轮胎六分方向力与力矩分量。六分力传感器是能够全方面测量笛卡尔坐标系3 个方向力与力矩分量,是最完整的多分力传感器。汽车轮胎力传感器串接在轮胎轮辋和车桥轮毂之间,目前美国MTS 公司、瑞士Kistler 公司以及密西根科技公司(MSC)等对多维轮力传感器进行了相关研究,并已有成熟产品[35]。
表1 是密西根科技公司的 LW-2T-60K-S 和LW-2T-100K-S 车轮六分力传感器(WFT),可以测量8 级卡车和大型越野车辆所有车轮受力和力矩。这两款传感器可以提供垂直、横向和纵向受力以及外倾力矩、转向力矩和扭矩的独立输出信号。它们可全天候使用,是所有工况下进行公路和越野测量的理想选择。目前还未见国产市场化的车辆多分力传感器产品。2014 年,国外货车车轮六分力传感器已经进入我国市场,已有卡车生产商和汽车科研单位购买。
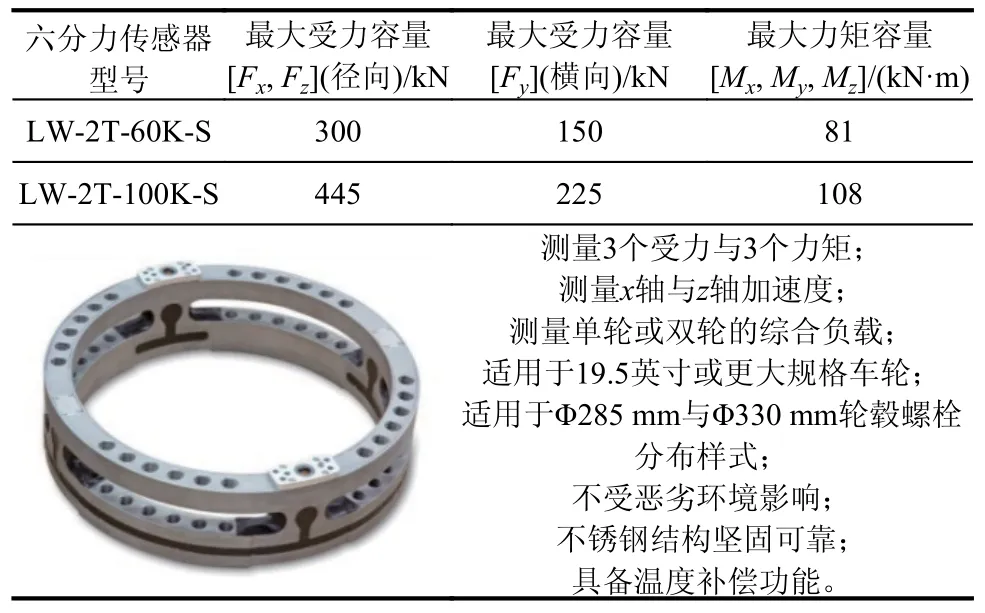
表1 重型车车轮六分力传感器参数表Table 1 Parameters of wheel six component force sensor of heavy vehicle
车辆动力学研究显示,车辆惯性运动会产生很大的车轮动力荷载,这种轮胎荷载对路面受力十分不利,不仅释放能量很大,而且在弯道运行和加减速过程中,还会存在多个方向的复杂荷载组合,进而产生复杂的综合作用机制。可能诱发显著的路面-路基耦合振动和复杂的路面结构振动、抖动和损伤。如果公路线形不佳、车辆重量大、车辆改装和异型结构、路基条件不良几个诱发条件集中在一起,将会进一步加剧这种作用的破坏效应,诱发路面过早破坏。
受制于车辆学科交叉的壁垒和现场实车试验困难,目前道路工程领域对于车辆运动惯性动力荷载的性质以及道路线形、车辆、路面结构等因素的作用机制还知之甚少。基于六分力传感器,可以实时采集轮胎任意时刻的6 个分量荷载响应值,采集频率可达2500 Hz 以上,结合路线数据和路面数据进行联合分析,对于深入揭示相关荷载的性质和机制无疑具有重要实际检验价值和理论价值。
鉴于以上,本文拟采用美国密歇根科技公司(MSC)货车车轮六分力传感器,采集不同道路线形、车型、载重和路面类型货车轮胎荷载实车试验数据,结合车辆动力学理论进行了典型货车运动惯性荷载特性分析。重点揭示了运动惯性荷载特性以及运动惯性荷载与线形、车型和载重量的关系和形成机制。
1 重型货车运动惯性荷载测试
1.1 重型车车轮六分力传感器系统
测试采用美国MSC 公司生产的货车车轮六分力传感器型号为LW-2T-60K-S,其工作原理是在轮毂适配器与轮辋适配器之间安装传感器,然后把修改后的轮辋装上轮胎,再将轮毂适配器装配在车轴上。同时,还包括一些其他的主要传感器:加速度传感器、位移传感器、GPS 信号器、视频数据及逻辑信号和QuantumX 数据采集系统等。
1.2 测试道路条件
测试路段选取在G319 国道漳州-龙岩路段,桩号范围为K126+000~K193+800,全长67.8 km,测试路段平面线形如图1 所示。本路段平曲线有297 条,直线有264 条,弯道占总长度的47.8%。小于200 m 的平曲线半径占曲线总长的70.8%,占总路段长度的33.9%,最小平曲线半径为23 m。对于纵向坡度,大于3%的纵向坡度占路线总长的42.0%,最大纵坡达到7%~8%。
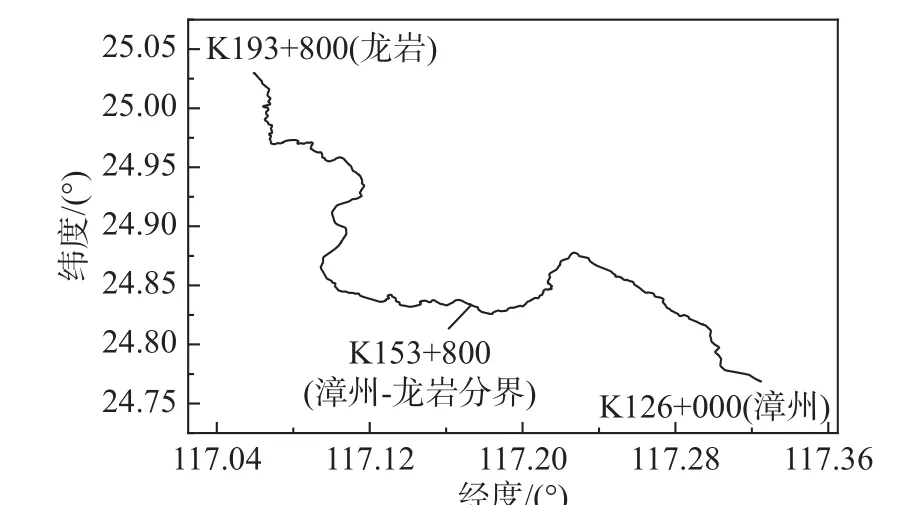
图1 G319 国道K126+000~K193+800 平面线形Fig.1 Horizontal alignment of K126+000~K193+800 on G319 National Highway
1.3 测试车辆
试验采用两种典型的货车,分别为4 轴12 轮的解放牌自卸车和6 轴22 轮的重型半挂牵引车,车型如图2 所示。4 轴货车的3 个六分力传感器位置为2 轴左侧车轮、3 轴左侧车轮和3 轴右侧车轮,分别记为L2、L3 和R3;6 轴货车的3 个六分力传感器位置为1 轴左侧车轮、4 轴左侧车轮和4 轴右侧车轮,分别记为L1、L4 和R4。图2中斜杠车轮和阴影标记轮胎为六分力传感器安装位置。
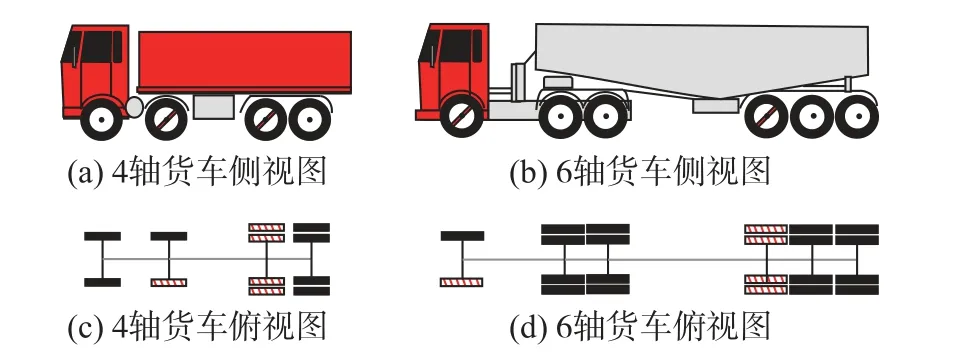
图2 两种测试货车车型示意图Fig.2 Schematic diagram of two types of test truck
两种测试货车装载重量与轴载分配、尺寸参数分别如表2 和表3 所示。
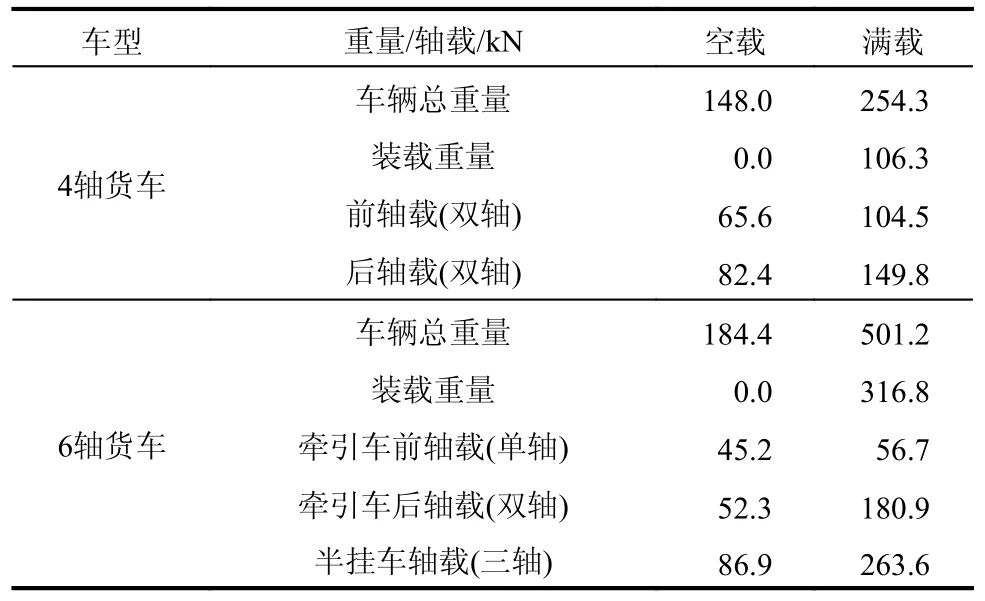
表2 两种测试货车装载重量和轴载分配Table 2 Loading weight and axle load distribution of two types of test truck
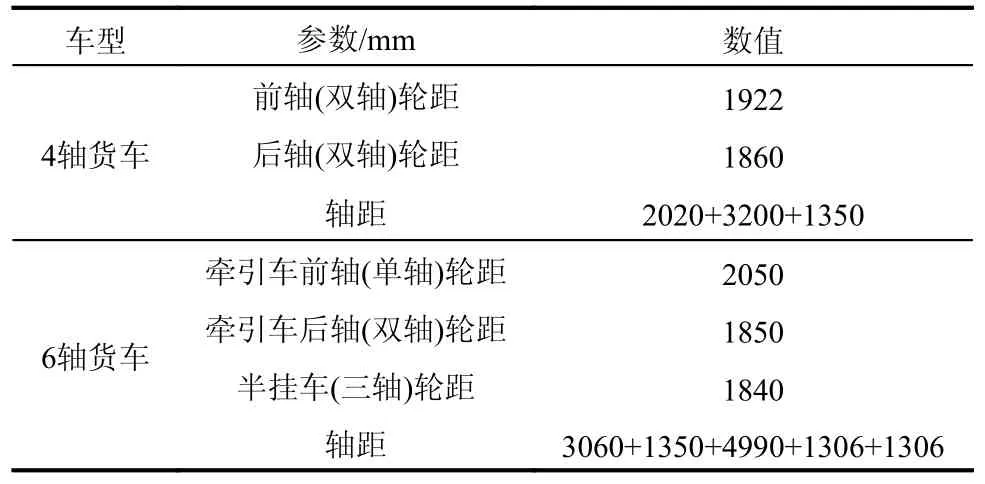
表3 两种测试货车尺寸参数Table 3 Dimensional parameters of two types of test truck
1.4 数据采集和处理
1)测试流程与工况
货车运动惯性荷载测试流程如图3 所示。重型货车运动惯性荷载测试中的车型选择4 轴和6 轴货车;载重选择空载和满载;路面类型选择沥青加铺路面和水泥混凝土路面;行车方向分为上行和下行,桩号范围为K126+000~K193+800。
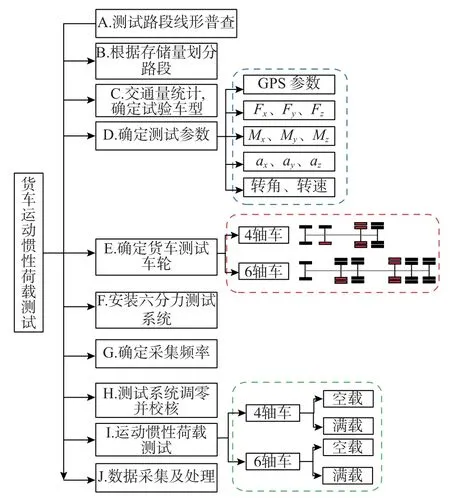
图3 重载货车运动惯性荷载测试流程Fig.3 Test procedure of motion inertia load of heavy truck
2)数据预处理
测试路段全长为67.8 km,由于全长路段较长,考虑到数据采集器的内存容量,以10 km 作为路段分段区间进行储存。然后,通过数据分析软件nCode 进行采集数据提取,并结合不同线形,选取关键点进行划分,形成不同的数据集。
从两方面对数据的准确性进行校核:1)左右轮My扭矩信号幅值与相位是否一致;2)检查GPS经纬度绘制出的车辆运行轨迹是否符合真实地图。检查结果显示:货车左右轮扭矩信号幅值与相位一致,符合左右轮在制动过程中的特征。车载GPS绘制地图与百度地图绘制当地路线地图一致。六分力采集系统最大导出频率为2500 Hz,分析不同导出频率下GPS 里程误差,取导出频率500 Hz。
3)分析工况
进行测试路段的运动惯性荷载特性与影响因素分析,参照《公路项目安全性评价规范》[36],线形划分原则如表4 所示,具体分析工况如表5 所示。

表4 线形路段划分原则Table 4 Division principle of alignment sections

表5 车辆运动惯性荷载分析工况Table 5 Test conditions of vehicle motion inertia load
基于车轮六分力数据,对车轮垂向力、纵向力、横向力的值域、极值、位置、接地压强以及运动惯性荷载冲击系数进行分析。车轮六分力测试得到的垂向力是车轴对车身的支撑力(不包括车轮自重),但相比车身质量,车轮质量较小,故可忽略不计,直接采用车轮垂向力近似等于垂向运动惯性荷载;各方向接地压强等于车轮相应方向力除以当量圆面积;运动惯性荷载冲击系数IF计算公式如下[17]:
式中:Fzd为车轮垂向运动惯性荷载;Fs为车轮静载。
2 货车运动惯性荷载特性分析
2.1 运动惯性荷载特性
典型的车轮六分力荷载可见图4,图4 中数据为路段桩号K135+820~K138+520 的6 轴满载货车1#轴左轮六分力测试结果。数据统计和分析显示,货车运动惯性荷载分为两类,第一类表现为增大的均匀性荷载,另一类为冲击性荷载;在3 个方向荷载中,垂向方向上数值最大,纵向和横向水平方向上数值较小。垂向运动惯性荷载值域最大为[−4.8 kN, 98.4 kN],纵向运动惯性荷载值域最大为[−15.2 kN, 19.9 kN],横向运动惯性荷载值域最大为[−32 kN, 21.3 kN];垂向接地压强值在0.7 MPa~1.4 MPa,横向接地压强值一般在0.2 MPa~0.5 MPa,纵向接地压强值一般在0.2 MPa~0.3 MPa。

图4 路段K135+820~K138+520 的6 轴满载货车1#轴左轮六分力测试结果(工况1)Fig.4 Six-component load of left wheel of six-axle full truck 1# axle for K135+820~K138+520 (Condition 1)
路段K135+820~K138+520 的6 轴满载货车1#轴左轮垂向荷载功率谱密度分析结果如图5 所示。从图5 中可以看出,荷载功率谱密度主要呈现3 个较为明显的峰值分布特征,频率分别对应0.7 Hz、1.2 Hz 和4.0 Hz。
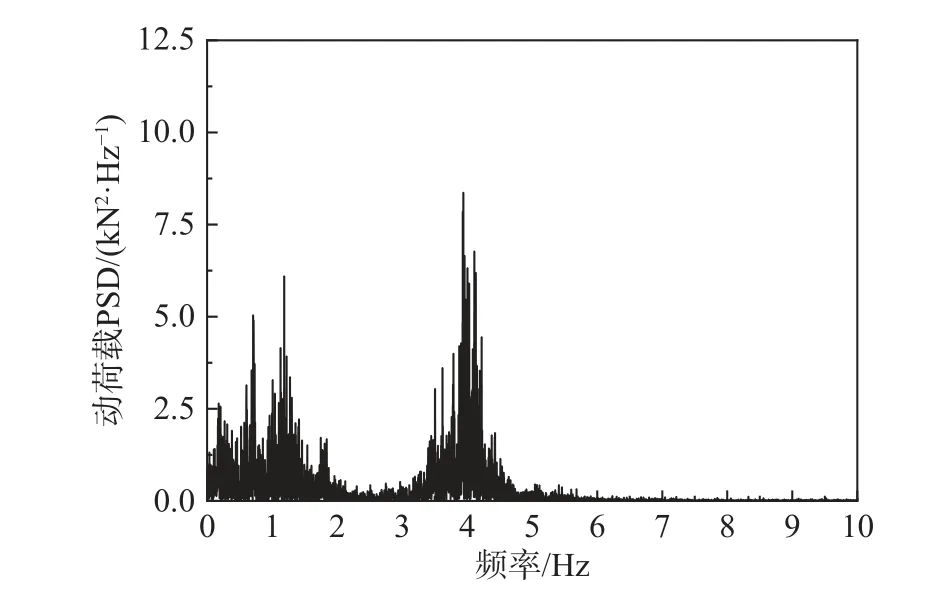
图5 路段K135+820~K138+520 的6 轴满载货车1#轴左轮垂向荷载功率谱密度(工况1)Fig.5 Vertical load power spectral density of left wheel of six-axle full truck 1# axle for K135+820~K138+520(Condition 1)
货车对地面的运动惯性荷载是接地压强、接地面积和轮胎数量的乘积之和。计算显示,较大的压强提升通过轴数和轮胎数量放大,会形成很大的惯性冲击荷载。如图6 和图7 所示,在工况3 4 桩号为K137+594.8 位置1774.8 m 的A处,此位置属于坡底转弯路段,4 轴货车后双轴轮胎垂向荷载从13.9 t 的静荷载提升到了24.9 t,水平纵向单侧荷载最大达到0.9 t(单轮0.45 t),水平横向单侧荷载最大达到1.4 t(单轮0.7 t)。统计货车后轴荷载最大总吨位显示,4 轴货车后双轴荷载总吨位最大可达29.8 t,6 轴货车后三轴荷载总吨位最大可达59.0 t,分别比静载大149%和196.7%,荷载效应十分显著。
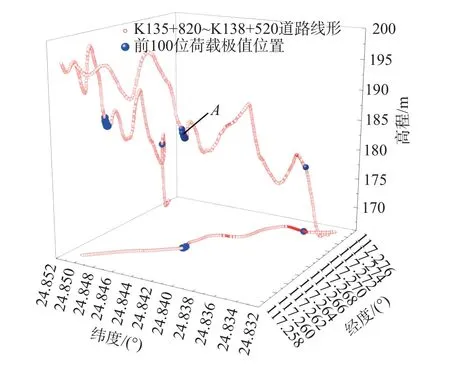
图6 4 轴货车2#轴垂向力前100 极值空间分布(工况3)Fig.6 Spatial distribution law of top 100 extreme value vertical force of four-axle vehicle of 2# axle (Condition 3)
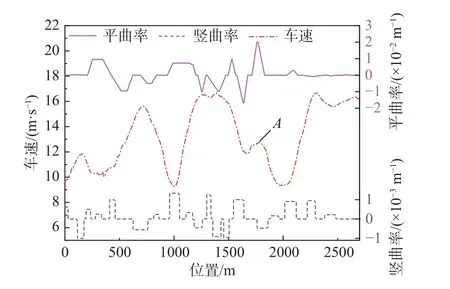
图7 4 轴货车速度随平纵线形分布(工况3)Fig.7 Spatial distribution law of four-axle vehicle speed(Condition 3)
测试货车六分力值域、接地压强和冲击系数如表6 所示;4 轴货车垂向力前100 极值空间分布、速度曲线、垂向力排序分别如图6~图8 所示;4 种线形路段的运动惯性荷载极值和冲击系数最大值如表7 所示。
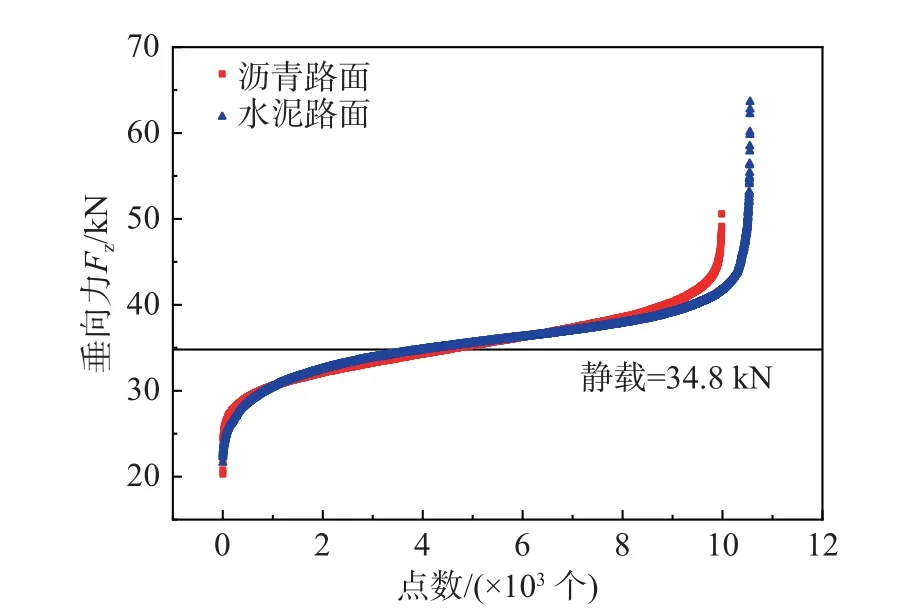
图8 4 轴货车3#轴左轮垂向力排序(工况3)Fig.8 Sequence of vertical forces on the left wheel of the 3#axle of four-axle truck (Condition 3)

表6 测试货车运动惯性荷载值域、接地压强、荷载总吨位和冲击系数(工况2)Table 6 Value range, grounding pressure, gross tonnage, and impact coefficient of truck motion inertia load (Condition 2)
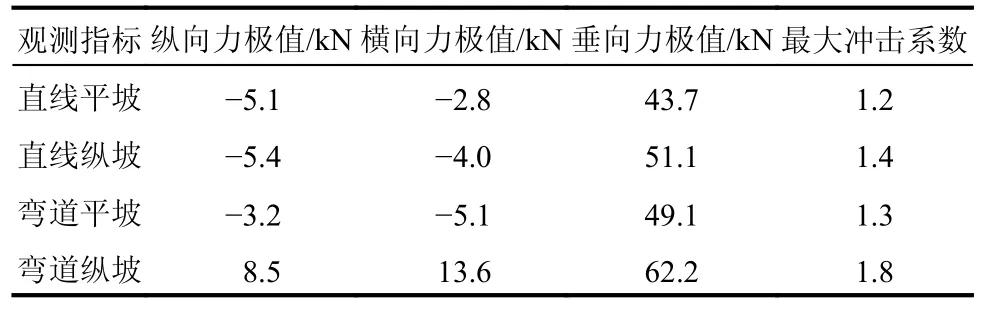
表7 运动惯性荷载极值和冲击系数最大值汇总(工况3)Table 7 Summary of extreme value of motion inertia load and maximum value of impact coefficient (Condition 3)
对图6~图8 进行分析,发现货车行驶过程中由于路线起伏、平面变化和车辆驾驶行为,车轮六分力在多个位置均发生了突跳,荷载前100 位置集中出现坡底和转弯处,对路面产生了很大的冲击作用。对比显示,水泥混凝土路面与沥青路面的垂向运动惯性荷载特性相当,都出现了急剧升高的冲击荷载,水泥混凝土路面的荷载峰值更大。对表6 分析,发现垂向运动惯性荷载出现负值现象。分析认为:当车辆在行驶过程中,驶入坑槽而脱离地面时,由于车轮的惯性及车轮与车身的运动行为,车轮对车身会产生垂直向下的力。当力的大小与车轮自重相等时,测得的垂向力为零;当力的大小超过车轮自重时,测得的垂向力为负值。竖向荷载冲击系数在1.8~4.2,远大于常规冲击系数1.2。
从图6 和表7 可以看出,在坡底和转弯位置处,4 轴货车2#轴垂向惯性荷载最大值达到62.2 kN,比标准设计轴载大24.4%,惯性冲击系数最大达到1.8,比路面设计使用的荷载修正系数大41.7%;纵向运动惯性荷载最大达到8.5 kN,为车轮垂向静载的24.3%;横向运动惯性荷载,最大达到13.6 kN,是车轮垂向静载的50.9%。
对于垂向运动惯性荷载,弯道纵坡最大,直线纵坡次之,平直路段最小;对于纵向运动惯性荷载,弯道纵坡最大,直线纵坡次之,弯道平坡最小;对于横向运动惯性荷载,弯道纵坡最大,弯道平坡次之,直线平坡最小。
2.2 复杂运动模式
研究显示:车辆的惯性运动模式往往不是单独存在,而是多种运动模式的复合。车辆在弯道上是横摆、侧向和侧倾运动的复合,造成对路面的长时冲击荷载;竖曲线上的制动与俯仰运动复合,造成对路面的短时冲击荷载;车辆在弯坡路段上,是多种惯性运动模式的复合,对路面造成的冲击作用最大。根据车辆运动惯性荷载特性对车辆运动模式进行分级,具体如表8 所示。具体分为6 个级别,级别越高代表存在的运动模式越多越复杂。

表8 复杂运动模式分级Table 8 Classification of vehicle complex motion modes
结合车辆动力学建立车辆惯性运动行为判别标准,如表9 所示。分析发现:车辆在平直路段上运行时,惯性运动荷载系数最小,一般只是简单地做加减速或制动运动或垂直振动(路面不平度差),运动模式可以达到I 级,最高为III 级;车辆在弯道上的侧倾运动造成对路面的大冲击荷载,或在竖曲线上的俯仰运动造成对路面的短时冲击荷载,运动模式可达到IV 级,最高为V 级;车辆在弯坡线形路段上,运动惯性荷载系数最大,是6 种惯性运动模式的复合,最高可以达到VI 级。
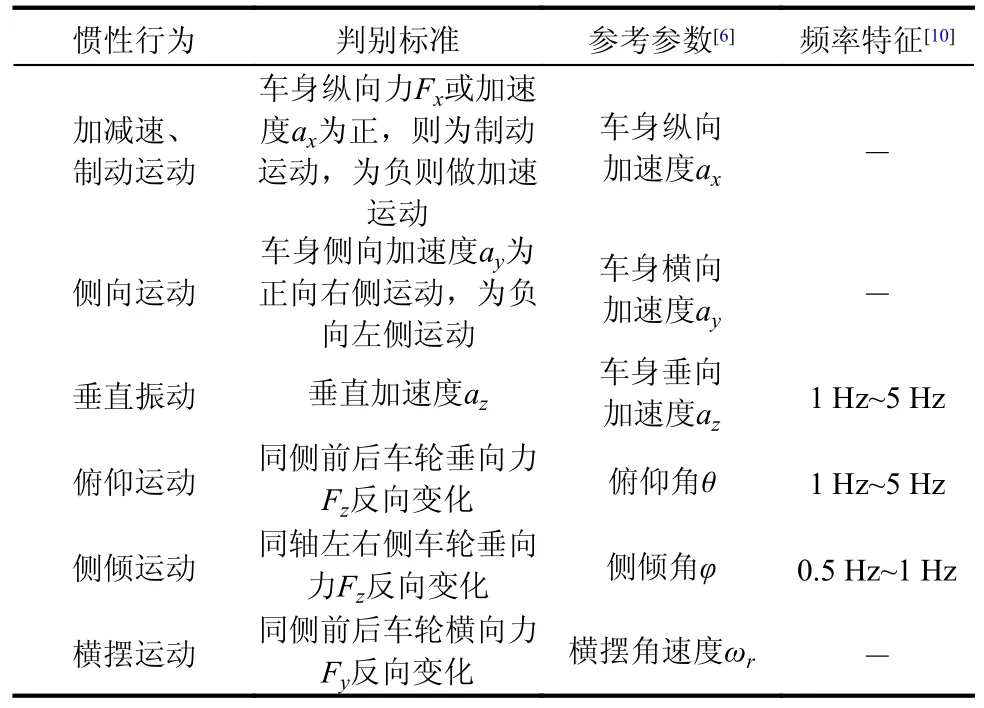
表9 车辆惯性行为判别标准Table 9 Criteria for vehicle inertial behavior
2.3 持时与频率特性
研究显示:运动惯性荷载冲击作用存在持续时间长和短的两种类型,持续时间长的冲击一般是由弯道侧倾运动引起的,持时等于弯道长度除以车速,本文典型工况持时可达10 s 以上;而短时冲击是由于在竖曲线上的车辆制动或加减速引起的俯仰运动以及摇摆运动造成的,持续时间一般与车辆的制动行为和自身振动特性有关,一般持时量级在1 s 以下。荷载功率谱密度分析发现,运动惯性荷载主要频率与激励特性、制动行为和车辆振动特性有关。根据文献[10]可知,弯道路段,荷载功率谱密度峰值频率主要在0.5 Hz~1 Hz,对应车辆的侧倾振动模式;直坡路段,荷载功率谱密度峰值频率主要在1 Hz~5 Hz,对应车辆的俯仰振动模式;在弯坡路段,峰值频率分别在0.5 Hz~1 Hz 和1 Hz~5 Hz,对应车辆侧倾和俯仰振动模式,两种运动模式荷载功率谱密度峰值均比弯道和纵坡大。
从图4 中可以看出,在弯道上(图中位置2),车辆运动惯性荷载均发生了明显的长时冲击特性,持续时间可达13.2 s,最大增幅达到55.8%;而在竖曲线上(图中位置1),车辆运动惯性荷载发生了明显的短时冲击特性,持续时间为0.075 s,最大增幅达到69.8%。相比长时冲击,短时冲击对运动惯性荷载的影响程度更大。
4 个线形路段4 轴满载货车2#左轮垂向运动惯性荷载进行功率谱密度分析结果如图9 所示。
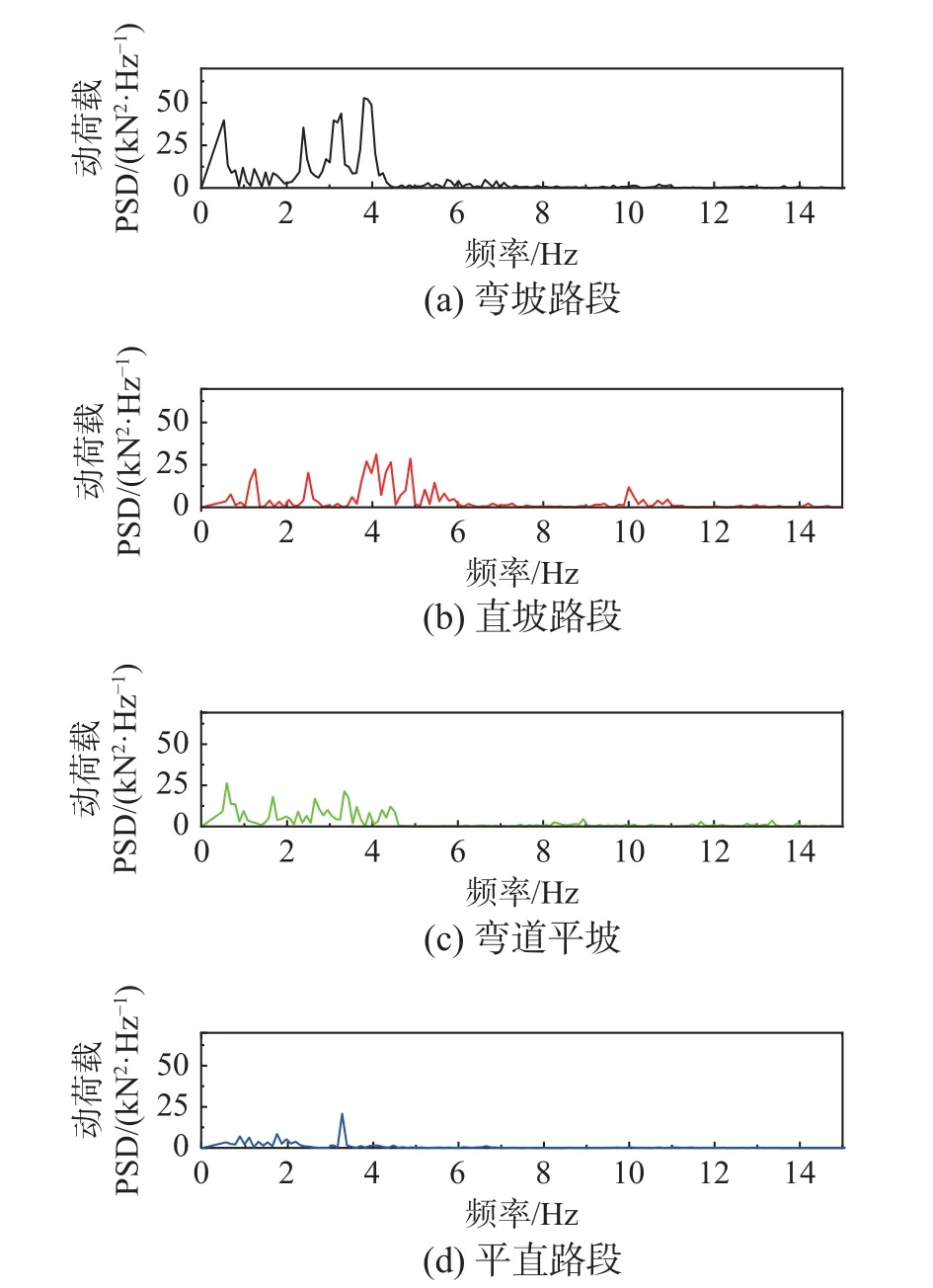
图9 4 轴满载货车2#轴左轮荷载功率谱密度(工况3)Fig.9 Power spectral density of vehicle motion inertia load in four alignment sections (Condition 3)
对图9 进行分析,并结合表9 的频率特征推理可知,在弯道路段,峰值在0.5 Hz~1 Hz 和1 Hz~5 Hz 出现多个峰值,分析发现:分别对应车辆的侧倾和俯仰振动模式;侧倾运动对应荷载功率谱密度比俯仰运动大,说明在弯道上侧倾运动为主要模态。在直坡路段,功率谱密度峰值主要分布在1 Hz~5 Hz 和10 Hz~15 Hz,表明货车在直坡上的运动不仅有俯仰运动模式,还有车轮跳动模式[9],但前者比后者大。在弯坡路段,峰值频率分别在0.5 Hz~1 Hz 和1 Hz~5 Hz,对应车辆侧倾和俯仰振动模式,两种运动模式荷载功率谱密度峰值均比弯道和纵坡大。
3 因素影响特性与机制分析
3.1 线形对运动惯性荷载的影响机制
研究显示:线形对运动惯性荷载的影响因素主要包括曲线长度和曲率大小。平曲线曲率越大,运动惯性荷载变化越大;竖曲线曲率并不一定引起运动惯性荷载明显变化,需要车辆有制动或加减速行为引起垂向和纵向运动惯性荷载的突跳。平曲线长度越长,运动惯性荷载冲击变化持续时间越长,但竖曲线长度对其影响不大。
车辆在直坡竖曲线上频繁制动(加速),产生俯仰运动,车身进行点头(后仰)运动,发生前后车轮动荷载转移,从而在直坡段上的车辆运动惯性荷载比在平直路段上大。车辆在弯道上运行,以侧倾运动为主,左右两侧车轮发生荷载转移,导致某一侧车辆运动惯性荷载大于平直路段上运动惯性荷载。弯坡路段由于平纵线形叠加作用,导致车辆运动惯性荷载幅值最大。
K135+820~K138+520 和K143+000~K146+300路段3 个测试车轮的垂直、纵向和横向运动惯性荷载测试结果分别如图10 和图11 所示。从图10(a)和图11(a)中可以看出,两个测试路段垂向运动惯性荷载均随平面曲率的增大而增大,在平面曲率最大处(A点和B点),对应垂向运动惯性荷载最大;从图10 和图11 中也可以看出,平曲线越长,运动惯性荷载持续时间越长。
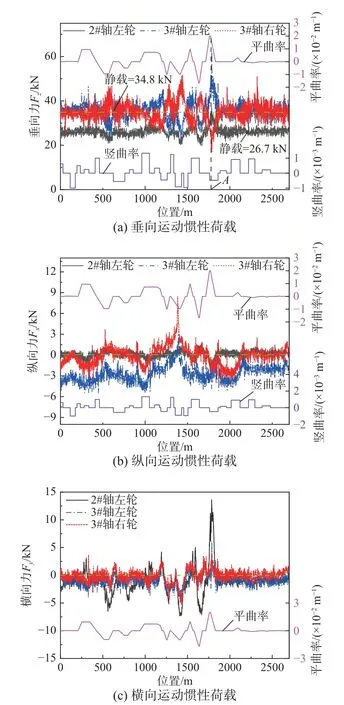
图10 4 轴满载货车运动惯性荷载(工况4)Fig.10 Vertical longitudinal and transverse motion inertia load of four-axle full truck (Condition 4)
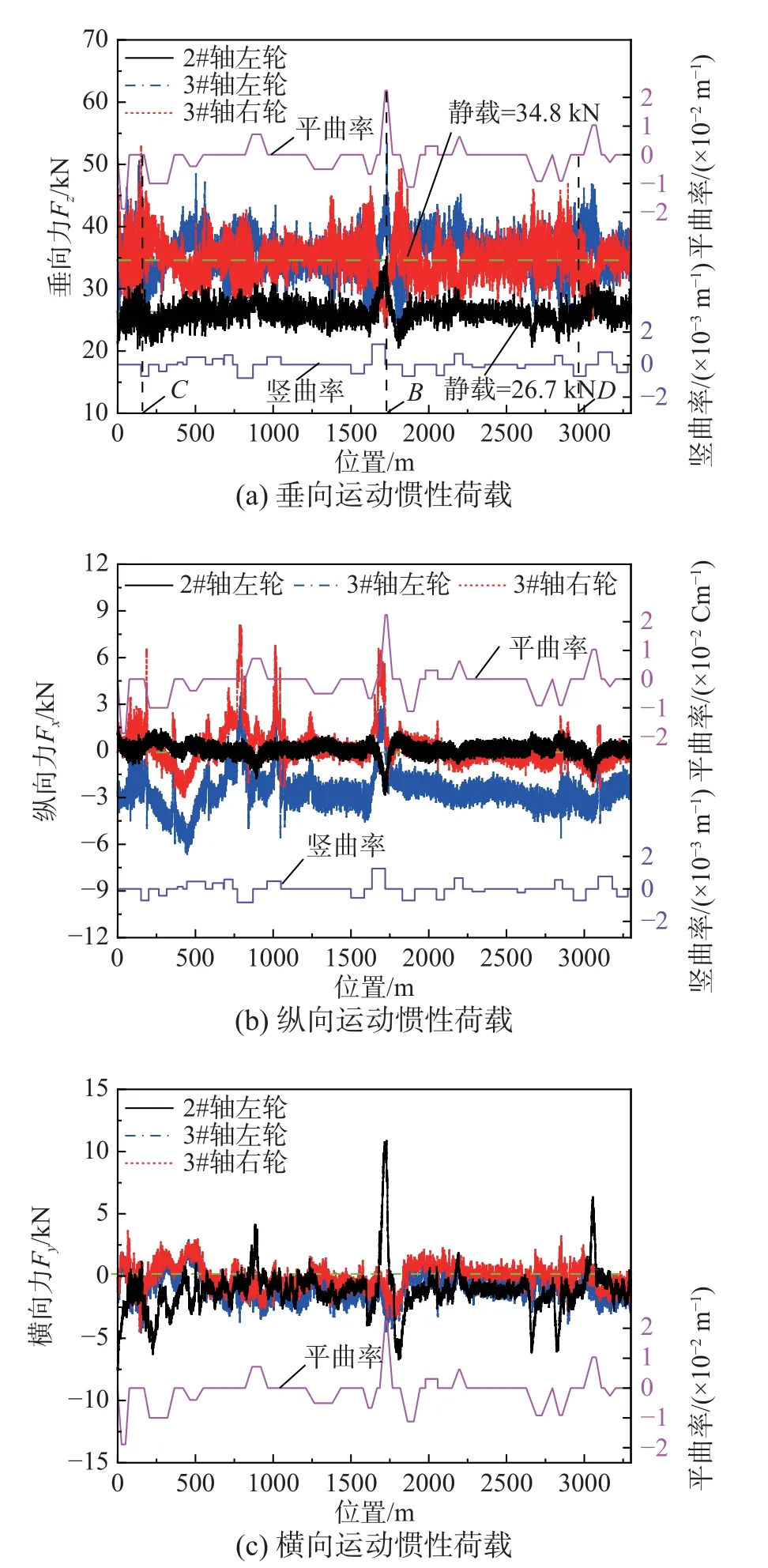
图11 4 轴满载货车运动惯性荷载(工况5)Fig.11 Vertical, longitudinal, and transverse motion inertia load of four-axle full truck (Condition 5)
竖曲率对垂向运动荷载的影响与车辆驾驶行为有关。如果存在制动和加减速行为,则运动惯性荷载变化明显。观察图11(a)中C点发现,该处竖曲率较大而平曲率很小(忽略平面线形影响),车辆有明显的制动和加减速行为,垂向运动惯性荷载变化很大;但图11(a)中的D点同样竖曲率值较大而平面曲率很小,车辆没有明显制动或加减速行为,垂向运动惯性荷载变化很小。
竖曲率和平曲率对纵向运动惯性荷载均有一定影响,但竖曲率影响更大。从图10(b)和图11(b)中可以看出,随着道路平面曲率和纵面竖曲率变换,车辆纵向运动惯性荷载呈上下波动变化,对路面产生水平冲击作用。
横向运动惯性荷载基本只受平曲率影响,且随着平曲率的增大而增大。从图10(c)和图11(c)中可以看出,车辆横向运动惯性荷载随平面曲率变化呈正负交替变化,二者变化规律十分吻合。在平曲率增大位置,横向运动荷载随之增大;平面曲率最大位置对应横向运动荷载最大值。
提取上述路段桩号为K135+820~K138+520 和K143+000~K146+300 具有代表位置的线形参数和相应垂向运动惯性荷载数据,并计算3#轴左右车轮对应的最大荷载冲击系数,结果如图12 所示。

图12 线形参数与最大运动惯性荷载冲击系数的分布关系(4 轴满载货车3#轴左右车轮)Fig.12 Distribution relationship between alignment parameters and impact factor of moving inertia load (left and right wheels of 3# axle of four-axle full truck)
从图12 中可以看出,运动惯性荷载冲击系数总体上随着平曲率的增大而增大,在平曲率为1/50 m−1处,对应冲击系数最大,可达1.8;在平曲率为1/1750 m−1处,对应冲击系数最小,为1.1。竖曲率对垂向运动惯性荷载的影响规律较为复杂,同时也与驾驶行为有关。
3.2 车辆对运动惯性荷载的影响机制
3.2.1 车辆重量对运动惯性荷载的影响
研究表明:车辆重量通过增加车辆惯性影响荷载量级。4 轴空载车辆比满载车辆在行驶过程中对路面的振动幅度更大。满载工况下货车垂向、纵向和横向运动惯性荷载均比空载大,特别是在弯坡路段上,货车对路面造成纵向、横向剪切磨损作用更大。
K135+820~K138+520 的4 轴空载货车2#轴左轮、3#轴左轮和右轮的垂直、纵向和横向运动惯性荷载测试结果如图13 所示。

图13 4 轴空载货车运动惯性荷载(工况6)Fig.13 Vertical, longitudinal and transverse motion inertia load of four-axle empty truck (Condition 6)
从图13 中可以观察到,对于两种不同载重量,空载工况下,4 轴货车垂向、纵向和横向运动惯性荷载最大值达到36.6 kN、5.5 kN、6.9 kN,运动惯性冲击系数最大达到3.1。满载工况下,4 轴货车垂向、纵向和横向运动惯性荷载最大对应车轮位置为3#轴左轮,最大值达到62.2 kN、8.5 kN、13.6 kN,运动惯性冲击系数最大达到1.8。
4 轴空载货车单侧车轮最大垂直荷载冲击系数是4 轴满载货车的1.8 倍,在行驶过程中,空载车辆对路面的振动幅度更大。同时,满载工况下货车最大纵向运动荷载和横向运动荷载分别比空载工况大52.9%、94.3%,弯坡路段上货车对路面造成纵向、横向剪切磨损作用更大。
3.2.2 车型对运动惯性荷载的影响
研究显示:车型会引起荷载分布差异,是形成运动模式的重要来源,特别是车辆联接方式(铰接或固结)、车厢的形状、轴型和轴位。6 轴货车单侧车轮最大垂向运动惯性荷载冲击系数比4 轴货车大,分析认为:这与6 轴货车的橄榄异形车厢形状有关;6 轴货车纵向、横向运动惯性荷载比4 轴货车小,这与6 轴货车车厢采用铰接方式,不能传递水平荷载有关。满载工况下,6 轴货车后轴垂向运动惯性荷载比前轴大,6 轴货车左右轮垂向运动荷载同样存在差异,这与车辆的轴型和轴位差异有关。从路面的垂直方向受力来看,6 轴货车的荷载效应更为显著。
K135+820~K138+520 测试路段6 轴满载货车1#轴左轮、4#轴左轮和右轮的垂直、纵向和横向运动惯性荷载如图14 所示。对比图14 和图10 可以发现,不同车辆的车厢形状、铰接方式、轴型和轴位差异是影响货车运动惯性荷载的重要因素。4 轴货车垂向、纵向和横向运动惯性荷载最大值达到62.2 kN、8.5 kN 和13.6 kN,运动惯性冲击系数最大达到1.8;6 轴货车垂向运动惯性荷载最大值达到80.1 kN、5.7 kN 和12.2 kN,运动惯性冲击系数最大达到1.6。

图14 6 轴满载货车运动惯性荷载(工况7)Fig.14 Vertical, longitudinal and transverse motion inertia load of six-axle full truck (Condition 7)
6 轴货车单侧车轮垂向最大运动荷载冲击系数比4 轴货车大28.8%,这与6 轴水泥罐车的异性车厢引起的垂向点头运动有关。
4 轴货车纵向、横向最大运动荷载比六轴货车大49.1%和11.2%,这与6 轴货车车厢采用铰接方式,不能传递水平荷载有关。相比垂向运动惯性荷载,水平两方向的荷载数值较小。从垂向惯性运动荷载来看,6 轴货车的荷载效应更为显著。
满载工况下,6 轴货车(4#轴)后轴垂向运动惯性荷载比前轴(1#轴)大219.6%,6 轴货车4#轴左右轮垂向运动荷载同样存在差异,最大相差188.9%,这与车辆的轴型和轴位有关。
3.2.3 车速和驾驶行为对运动惯性荷载的影响
研究显示:货车运动惯性荷载大小不仅与线形、载重和车型有关,同时还与车速和驾驶行为有关,实际上,交通系统是一个由人、车、路、环境等多因素构成的复杂系统,各因素间信息存在传递、处理、控制与反馈机制。进行人-车-路-环境复杂系统的建模和分析,可以更深入地明确系统中的影响因素和作用机理[37]。车速和驾驶行为显著影响货车运动惯性荷载。驾驶行为是在线形、路况和人的生理综合作用下产生的,决定了车辆的速度、变速和变向行为,进而诱发很大的惯性运动。
综合图7 和图10 可以看到,在工况3 和工况4桩号为K137+594.8 位置为1774.8 m 的A处,是车辆变速点,对应车辆运动惯性荷载的大幅度抖动变化。从驾驶行为和车速的关系推理可知,在该位置处,平曲率和竖曲率变化明显,容易诱发驾驶员进行制动减速和转向操作,进而通过车辆惯性对路面产生很大的运动冲击荷载。
4 讨论
综合以上的运动惯性荷载特性与机制研究,可以归结为从能量来源、荷载触发、运动模式以及激励组合等角度分析,总结重载货车运动惯性荷载机制与特性,具体如表10 所示。
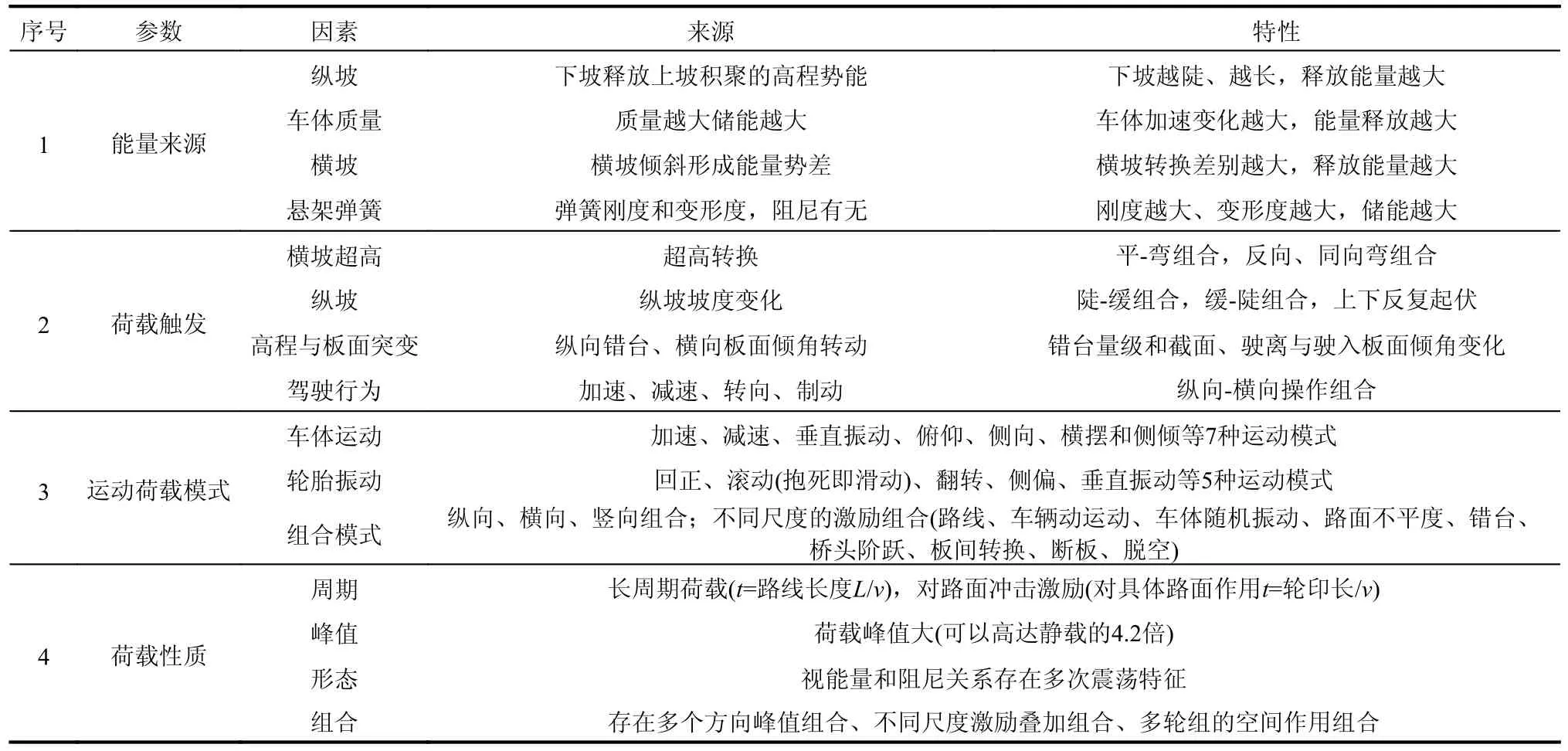
表10 车辆运动惯性荷载特性与综合机制分析Table 10 Property analysis and influencing factors of vehicle motion inertia load
从表10 可以看到,货车运动惯性荷载特性与线形、车辆、路面的关系密切。从测试数据可以看到,运动惯性荷载远高于目前规范采用的动力修正系数。我国国省干道由于资金限制,大量存在可能诱发重载货车惯性运动荷载破坏效应的不利条件(线形起伏大、转弯半径小、路基标准低),机场道面、场道接头、滑行道存在很多结构变异区和转弯道,最新的光伏道面采用钢化玻璃板,十分关心车辆复杂作用和冲击作用。惯性运动荷载研究成果可为各类道面结构和桥梁弯道结构设计应用提供理论支持。例如,由于匝道转弯段的车体侧倾运动,极易可能造成超载车辆的严重侧翻事故。后续需研究建立运动惯性荷载计算理论,以为相关理论应用提供支持。
5 结论
本文采用美国MSC 公司货车车轮六分力传感器,对货车车轮六分力进行实测,并结合车辆动力学理论进行了典型货车运动惯性荷载特性、影响因素特性与机制分析,具体结论如下:
(1) 运动惯性荷载分为两类:第一类表现为增大均匀性荷载,另一类为冲击性荷载;在3 个方向荷载中,垂向方向上数值最大,纵向和横向水平方向上数值较小。引起较大运动惯性荷载的敏感位置,一般分布在车速变化和行驶方向变化显著的转弯路段和坡底路段。
(2) 运动惯性荷载冲击位置存在持续时间长和短的两种类型。持续时间长的冲击一般是由弯道侧倾运动引起的,持续时间与弯道长度和车速有关,典型工况下,持续时间一般在10 s 以上;而短时冲击是由于在竖曲线上的车辆制动或加减速引起的俯仰运动以及摇摆运动引成的,持续时间一般与车辆的制动行为和自身振动特性有关,典型工况下,持续时间一般在1 s 以下。
(3) 运动惯性荷载主要频率与激励特性、制动行为和车辆振动特性有关。弯道侧倾运动引起的荷载功率谱密度主要频率在0.5 Hz~1 Hz;竖曲线俯仰运动引起的荷载功率谱密度主要频率在1 Hz~5 Hz。
(4) 道路线形起伏和平面转换会引起车辆加减速和复杂惯性运动模式。平曲线曲率越大,运动惯性荷载变化越大;竖曲线曲率越大,并不一定引起运动惯性荷载明显变化,需要车辆有制动或加减速行为引起垂向和纵向运动惯性荷载的突跳。平曲线长度越长,运动惯性荷载冲击变化持续时间越长,但竖曲线长度对其影响不大。
(5) 车辆重量通过增加车辆惯性影响荷载量级。车辆联接方式、车厢的形状、轴型和轴位会引起荷载分布差异,是形成运动模式的重要来源。6 轴货车异形车厢形状造成单侧车轮最大冲击系数比4 轴货车大;货车车厢采用铰接方式导致6 轴货车纵向、横向运动惯性荷载比4 轴货车小。
(6) 车辆惯性运动产生的垂向荷载冲击系数很大,空载典型工况下,垂向冲击系数可达4.2,满载典型工况下,垂向冲击系数可达2.4。纵向冲击压强可达0.3 MPa,横向冲击压强可达0.5 MPa,给路面层间抗剪能力提出很大挑战。运动惯性荷载研究成果可为各类道面结构应用提供理论支持。考虑货车的运动惯性荷载作用效应对于货车重载交通路面结构与材料合理设计、桥梁弯道结构设计和车辆管理均十分必要。
