基于多伯努利滤波的厚尾噪声条件下多扩展目标跟踪
2023-08-04张星星
陈 辉 张星星
多扩展目标跟踪(Multiple extended target tracking,METT)[1-4]是利用高分辨率传感器获取的目标多源量测信息联合估计多目标个数和多目标状态(运动参数和形状).METT 将多目标跟踪问题推广到扩展目标层面.除了噪声、漏检和杂波等不确定因素之外,运动目标形状随机不规则展现,目标量测源在目标表面随机可变,而扩展目标对应量测的非唯一性又加剧了目标与量测之间的模糊关系,这就使得METT 问题的求解难度大大增加.
以有限集统计(Finite set statistics,FISST)理论[5-6]为基础的多目标滤波器在近些年引起了国内外学者的高度关注.该方法以集值估计的角度进行了多目标跟踪滤波问题的统一建模,并涌现出很多优秀的研究成果[7-11].其中包括以概率假设密度滤波器(Probability hypothesis density,PHD)为代表的一系列矩递推滤波器[7-8]和以势均衡多目标多伯努利滤波器(Cardinality balanced multi-target multi-Bernoulli,CBMeMBer)为代表的一系列多伯努利滤波器[9-11].两者相较而言,由于CBMeMBer 直接递推多伯努利有限集参数,最终直接近似了多目标有限集的后验概率分布,因此其滤波过程更加高效,滤波结果更加可靠.在此基础上,一些学者通过引入多量测似然函数模型将多目标跟踪问题推广到了扩展目标领域,提出了扩展CBMeMBer (Extended CBMeMBer,ECBMeMBer)滤波器[12-14].ECBMeMBer 滤波器不仅解决了目标数的过估计问题,还得益于扩展目标的多个量测源的信息融合提升了点目标CBMeMBer 滤波器的估计精度.序贯蒙特卡罗(Sequential Monte Carlo,SMC)方法仍然是ECBMeMBer 滤波器实现的有效方法,但它存在计算复杂度高的缺陷.相对于SMC 实现,基于线性高斯假设的高斯混合(Gaussian mixture,GM)实现具有计算成本低的优点.另外,非线性扩展[15]使GM-ECBMeMBer 滤波器具有处理非线性系统的能力.GM-ECBMeMBer 滤波器已经应用在多扩展目标跟踪[16-17]中.
值得注意的是,最优滤波器大多基于高斯分布前提进行推导,即用高斯噪声来表征其模型的统计不确定性.但在多扩展目标跟踪的实际工程应用中,为了保持最优滤波系统的有效性,需要比较精确的表征传感数据的统计特性.而可靠性较差的传感器很容易诱导出异常量测值,导致离均值较远处的量测噪声的不确定性增大,呈现 “厚尾特性”,例如视觉系统、全球定位系统(Global position system,GPS)设备和声纳传感器经常提供包含“位于某个整体分布模式之外”的异常量测数据.异常值可能来自传感器异常噪声、暂时性的传感器故障或环境中的意外(电磁)干扰.此外,目标未知运动(异常机动)所表现出的模型不确定性也会诱导产生厚尾的过程噪声.因此,过程和量测模型往往同时伴随着不可避免的厚尾噪声,这更贴近于工程实际,因而以高斯分布为前提假设的多扩展目标滤波性能将会严重下降,加剧METT 滤波问题处理的难度.现有的一些方法可以在一定程度上处理厚尾噪声,如膨胀法[18]通过膨胀量测噪声的协方差来减弱厚尾噪声干扰,自适应方法[19]利用变分贝叶斯(Variational Bayesian,VB)近似方法来联合估计多目标量测噪声协方差,能够解决实际的厚尾量测噪声与假定的高斯量测噪声之间的不匹配问题.多模型(Multiplemodel,MM)方法[20]利用多个模型在不同阶段动态匹配目标状态,处理实际的厚尾过程噪声与高斯假设过程噪声之间的不匹配问题.然而,膨胀法和自适应法不能处理厚尾过程噪声,而MM 方法不适用于解决厚尾量测噪声问题.文献[21-22]提出在高斯假设下通过重加权方法同时处理厚尾过程噪声和量测噪声,但高斯假设使得该方法处理厚尾非高斯噪声的能力受到限制.近几年的一些研究集中于应对这一困难,如文献[23]针对线性系统提出了一种基于学生t 分布的滤波方法,该方法借助学生t 分布很好地对过程异常值和量测异常值建模,最终通过学生t 分布来近似系统的后验概率密度函数.此外,一些学者研究了非线性系统的学生t 滤波器[24-25]以及一些相应的数值求解方法[26-27].虽然基于学生t分布的学生t 滤波器的性能可能会因自由度参数的选择不当而降低,但相比于基于高斯近似的滤波器,在处理厚尾非高斯噪声方面仍然显示出巨大的优越性.
多扩展目标跟踪中对于目标形状的有效估计是目前METT 求解的关键核心和难点[28].随机矩阵模型(Random matrix model,RMM)[29-31]是一类比较经典的扩展目标形状建模方法,它采用椭圆描述物体形状,并使用高斯逆Wishart 分布对扩展目标状态进行建模,能够得到目标的基本轮廓和方向信息.此外,随机超曲面模型(Random hypersurface model,RHM)[32-33]可直接建模扩展目标的不规则轮廓,该方法相较于RMM 对目标轮廓的辨识度更高,其假定每个测量源都位于目标轮廓边界的缩放版本中,通过借助径向函数描述目标随时间演变的不规则轮廓,再利用傅里叶级数将其展开,取有限阶系数近似表示星凸形扩展目标的形状边界.近几年,已有一些学者陆续提出结合基于随机有限集(Random finite set,RFS)的多目标滤波器解决具有不规则形状的多扩展目标跟踪问题[34-35].但是,扩展目标的多个量测源信息依然会同时存在厚尾噪声的影响,而且扩展目标的异常运动使得过程噪声中包含异常值,以上这些厚尾噪声特性显然会很大程度联合影响扩展目标形状和运动状态估计的准确性.已经有学者研究了厚尾噪声条件下单扩展目标跟踪问题[36],而且仅仅解决量测噪声为厚尾噪声时的单扩展目标跟踪问题.截至目前,国内外尚缺乏对于受厚尾噪声影响下带形状估计的多扩展目标跟踪问题研究的相关报道.所以,在厚尾噪声分布条件下,研究基于扩展目标多源量测信息稳健估计多扩展目标运动状态和不规则形状轮廓的滤波算法具有非常重要的现实意义.
鉴于此,本文的主要创新和贡献点是,针对复杂不确定性环境下受厚尾噪声影响的多扩展目标跟踪问题,研究提出相应的多扩展目标多伯努利滤波算法.首先,利用学生t 分布对带厚尾过程噪声和量测噪声的系统建模,利用学生t 混合(Student's t mixture,STM) 表征多伯努利密度,提出厚尾噪声条件下学生t 混合多扩展目标多伯努利滤波(Student's t mixture multiple extended target multi-Bernoulli filter,STM-MET-CBMeMBer)算法.进一步地,利用RHM 对扩展目标不规则星凸形轮廓进行建模,研究利用鲁棒学生t 容积滤波求解RHM 的高度非线性问题,并进一步推导提出非线性鲁棒学生t 混合多扩展目标多伯努利滤波(Nonlinear robust STM-MET-CBMeMBer based on the robust student's t cubature filtering,STMRStCF-MET-CBMeMBer)算法.最后,通过构造具有不规则形状的多扩展目标和多群目标的跟踪实验,验证了本文算法的有效性.
1 系统建模
通常,利用RFS 可以将多目标状态和多目标量测分别建模为
式中,F(X)和F(Z)XZ分别表示多目标 与 上所有的有限子集组成的集合.考虑到目标的存活、新生和消亡(不考虑目标衍生),多目标动态系统建模为
其中,xkRn表示k时刻的系统状态向量,n为系统状态维度,fk-1(·)为非线性系统转移函数,νk-1为系统的过程噪声.考虑到传感器检测的不确定性和杂波的影响,多目标观测模型可以建模为
其中,Θk+1(xk+1) 表示k+1 时刻传感器以检测概率pD,k检测到的由目标状态xk+1产生的量测数据构成的集合,κk+1表示k+1 时刻跟踪环境中的杂波量测集合.k时刻的任一目标状态xk Xk,对应传感器检测得到的量测zk Zk,其在非线性离散随机系统中的量测方程建模为
其中,zkRm表示k时刻的量测向量,m为量测维度,hk(·)为非线性系统观测函数,εk为系统的量测噪声.根据图1 可知,相较于高斯分布而言,学生t 分布具有厚尾优势,对异常值有良好的鲁棒性和包容度,由此学生t 分布适用于对厚尾噪声建模
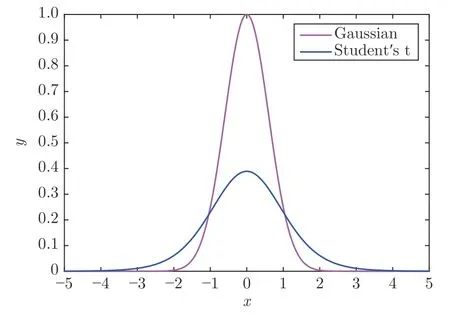
图1 高斯分布和学生t 分布示意图Fig.1 Gaussian distribution and student's t distribution diagram
其中,St(x;µ,Σ,v)表示学生t 分布,µ为均值,v为自由度参数,Σ 为尺度矩阵,它与协方差矩阵间的关系满足 Σ((v-2)/v)E[(x-µ)(x-µ)T].系统的初始状态向量x0建模为学生t 分布
其中,假设向量x0,νk,εk互不相关.学生t 分布和高斯分布比较图如图1 所示.
在上述建模的基础上,首先,在线性系统中研究厚尾噪声条件下的多扩展目标跟踪问题;然后,基于RHM 针对扩展目标不规则形状进行建模;最终,研究厚尾噪声条件下星凸形多扩展目标跟踪算法.
2 学生t 混合多扩展目标多伯努利滤波器
2.1 学生t 混合多扩展CBMeMBer 滤波器
ECBMeMBer 算法将CBMeMBer 算法推广到扩展目标跟踪领域,文献[13]借助概率生成泛函对ECBMeMBer 算法进行了详细的推导,并在系统状态方程和量测方程均满足线性高斯的前提条件下给出了GM 实现的步骤.然而,一旦系统中出现异常噪声,使得噪声特性已经不能用高斯特性去近似时,传统的GM-ECBMeMBer 的滤波性能明显下降.以下本文将研究引入学生t 混合(STM)模型来近似多伯努利RFS 的后验概率密度函数,建立更新学生t 混合分量参数的ECBMeMBer 的闭式递推框架,推导出一种学生t 混合多扩展目标CBMeMBer(STM-MET-CBMeMBer)滤波算法.
2.1.1 STM-MET-CBMeMBer 的预测步
考虑到系统可能受到异常噪声影响,将过程噪声和量测噪声均建模为多元学生t 分布,假设系统是线性的,则目标运动方程和量测方程通过简单推导分别可表示为
根据文献[13],ECBMeMBer 的预测步为
同时与文献[9]相同,假设系统中的存活概率、检测概率与系统状态相互独立
以上假设保持了滤波器递推过程中多伯努利密度对于学生t 混合近似的封闭性.将式(10),(12)和(17)代入式(16),得
根据Chapman-Kolmogorov 方程和Roth 等的学生t 随机变量的仿射变换,得到引理1.
引理 1.若P和Q均为正定矩阵,则有
结合引理1,可将式(18)的预测概率密度表示为
将式(17)代入式(15),得到预测的目标存活概率为
由此可见,STM-MET-CBMeMBer 的预测步为该时刻新生目标的多伯努利RFS 与存活目标的多伯努利RFS 的叠加,最终的预测航迹数为Mk|k-1Mk-1+MΓ,k.
2.1.2 STM-MET-CBMeMBer 的更新步
则k时刻更新的多目标密度由漏检部分和量测更新部分叠加构成
将式(17)代入式(29),推导可得
各个学生t 混合分量的权值为
为了求解式(32)中两个学生t 分布乘积的形式,根据文献[25]引入引理2.
引理 2.若P和R均为正定矩阵,则有
其中,dz表示系统的量测维度.根据引理2,进一步将式(32)表示为
其中,各个参数分别为
上述为带厚尾噪声的线性系统中,对ECBMeMBer 进行学生t 混合实现再利用学生t 滤波算法进行求解的完整过程.然而,本文的重要目的之一是研究在异常噪声影响下结合多源量测信息对扩展目标的不规则形状进行估计.由此,需要利用合适的扩展目标形状建模方法进一步深入研究厚尾噪声条件下星凸形多扩展目标跟踪问题.
2.2 学生 t 混合星凸形多扩展目标多伯努利滤波器
2.2.1 随机超曲面模型
Baum 提出的随机超曲面(RHM)模型可对任意星凸形扩展目标的多源量测进行建模.该模型假设每个量测源是目标形状边界随机缩放之后产生的随机超曲面上的一个元素,因此RHM 是一种量测集为超曲面的随机集模型.本文研究的对象为星凸形扩展目标,这种扩展目标可以表示为中心点为mk的星凸集合S(pk),其中pk为形状参数向量.如果(pk) 表示形状S(pk) 的边界,尺度因子sk为一维随机变量,且sk[0,1],那么量测源为
则星凸形扩展目标S(pk)的径向函数r(pk,ϕ) 可参数化表示为
其中,ϕ[0,2π],r(pk,ϕ) 为目标质心与轮廓之间的距离关于角度ϕ的函数,η(ϕ)[cos(ϕ),sin(ϕ)]T为单位向量.
由此,径向函数r(pk,ϕ) 的有限阶傅里叶级数展开为
其中,NF为有限阶傅里叶级数阶数.由此形状参数向量为
即径向函数可以表示为
进而,RHM 星凸形扩展目标的任一量测源可以建模为yk,lsk,l·R(ϕk,l)·pk·η(ϕk,l)+mk.由于量测模型由传感器噪声模型与量测源模型共同构成,即yk,l+εk,l,进而基于RHM 的星凸形ET 的量测方程为
利用式(56)可以有效描述星凸形RHM 的量测模型,这为多扩展目标的形状估计奠定了基础.
2.2.2 非线性鲁棒容积学生t 混合星凸形多扩展目标多伯努利滤波器
利用数值积分方法求解学生t 权值积分的思想为
结合三阶球面径向容积采样规则可得
其中,g(·)表示任意的非线性函数,nx为系统状态维数,St(x;µ,Σ,v)表示学生t 分布,其中µ为均值,v为自由度参数,Σ 为尺度矩阵.根据上述思想,具体步骤如下.
步骤1.基于标准学生t 分布密度积分准则确定容积采样点ξj及其权值ωj
其中,ej为该完全对称点集中的第j个点,容积点总数为 2nx.
步骤3.经过RHM 伪量测方程(56)传递后的容积点为
步骤4.由经过伪量测方程传递后的容积点确定量测的预测均值、协方差
步骤5.根据k时刻的量测值以及式(62)和式(64)确定系统的量测似然函数为
步骤6.根据式(42)~ (47),结合文献[25]中的非线性鲁棒学生t 容积滤波器和RHM 伪量测更新系统的均值、协方差和自由度参数
在上述滤波算法中,由式(42)可以看出,随着滤波递推自由度参数越来越大,最终使得系统的厚尾特性丧失,学生t 混合实现形式转变为高斯混合实现,从而导致本算法丧失了对厚尾噪声的鲁棒性.为了保持算法对厚尾特性的鲁棒性,采用二阶矩匹配的方法[24],对式(42)~ (44)和式(66)~ (68)进行修正,即
2.2.3 剪枝与合并
更新步之后,多扩展目标估计用多伯努利RFS来表示.此时,为了限制后验分布的学生t 混合分量的数目随着时间增加而不断增长,需要引入剪枝合并的方法.具体地说,剪枝合并方法是通过删除权重较小的学生t 分量及合并在一定距离内的学生t 分量从而达到减小计算负担的目的.剪枝合并部分算法的具体伪码如算法1 所示.
算法1.剪枝合并部分伪码
3 STM-RStCF-MET-CBMeMBer 算法实现伪码
为了更具体详细地说明本算法的滤波过程,本节给出该算法滤波部分的详细伪码,如算法2 所示.
算法2.本文算法滤波部分伪码
2)新生:
2)量测更新部分:
4 多扩展目标不规则形状评价性能指标
针对多扩展目标跟踪滤波结果的评价,需要综合考虑目标形状和目标运动状态的估计效果.本文引入拟Jaccard (Quasi-Jaccard)距离和最优次模式分配(Optimal sub-patten assignment,OSPA)距离来分别评价扩展目标不规则形状的估计性能和质心位置的估计性能,从而对滤波算法的性能形成较为全面的评价.
1)拟Jaccard 距离: 主要用于定量评价滤波算法对扩展目标不规则形状估计的精确程度.通过建立真实目标与估计目标之间的关联矩阵[35],将目标的真实质心位置和滤波得到的估计质心位置重合,找到真实目标形状与估计目标形状之间的相似程度.k时刻扩展目标的真实轮廓与估计轮廓间的拟Jaccard 距离定义为[35]
其中,d(c)(x,y)min(c,‖x,yπ(i)‖),距离阶次表示为p(1,∞),Πk表示集合{1,2,···,k}的全排列.c为截断系数,一般取正数用于调整集合元素个数误差产生的影响.
5 仿真实验
仿真厚尾噪声场景对不同的多扩展目标滤波算法进行比较,以验证本文算法的有效性,选择的依据为: 1)文献[35]是最新提出的星凸形多扩展目标多伯努利滤波器,与该算法的对比有利于客观反映厚尾噪声条件下的星凸形多扩展目标跟踪滤波器的性能;2)验证针对RHM 高度非线性问题,不同的非线性星凸形多扩展目标多伯努利滤波器的适应性.鉴于此,实验中选择的滤波器为: 1)基于容积卡尔曼滤波器的星凸形高斯混合多扩展目标多伯努利滤波算法(GM-CKF-ECBMeMBer);2)基于容积卡尔曼滤波器的星凸形学生t 混合多扩展目标多伯努利滤波算法(STM-CKF-MET-CBMeMBer);3)本文所提的非线性鲁棒学生t 混合星凸形多扩展目标多伯努利滤波算法(STM-RStCF-MET-CBMeMBer).通过比较以上三种算法在厚尾噪声条件下,对多扩展目标的不规则形状和运动状态、目标数(势)以及目标质心位置等估计精度,验证本文所提算法的有效性.
仿真场景设置为在带有杂波的观测区域[-500,500]m×[-500,500] m内存在3 个运动的不规则形状扩展目标.值得一提的是,为突出RHM 目标不规则轮廓细节估计的准确性,已有文献选择星凸形中的典型代表“十字形”作为扩展目标形状[32,34],“十字形”是典型的星凸形,具备了星凸形更多方向上的凹凸特征,而且基于一定数量量测就能利用RHM去刻画相对复杂的不规则形状,满足RHM 对于星凸形不规则形状的跟踪要求.文献[35]中出现了更为复杂的“五角星形”作为扩展目标轮廓,此时针对星凸形RHM 不规则形状估计的滤波算法提出了更高的要求.综上,本文选择“十字形”和“五角星形”作为跟踪目标的典型形状.设置目标的运动模型均为CV (Chan-Vese)模型,总检测时长为 50 s,采样间隔为T1 s.其中系统杂波在观测区域内均匀分布且个数根据均值为5 的泊松分布随机生成,假设每个目标的运动状态互不影响,系统中的噪声均为厚尾噪声,服从学生t 分布.自由度参数设置为v1v2v33,厚尾过程噪声和厚尾量测噪声分别构造如下:
其中,w.p.表示以一定的概率属于相应的分布,Rkσ2I2,I表示单位矩阵;σ0.1,95% 的νk和εk来自于协方差为和Rk的高斯噪声,5%的过程噪声和量测噪声来自于协方差严重增加(100 倍)的高斯分布.每个目标的运动模型为
其中,i1,2,···,nx,状态转移矩阵和过程噪声协方差分别为
其中,⊗表示克罗克内积,0.01 m/s2表示过程噪声标准差.传感器的检测概率pD0.99,目标的存活概率pS0.99.其他参数有: 扩展目标航迹存在概率的阈值Tr10-3,学生t 分量的截断阈值Tw10-4.学生t 分量的最大个数设置为Jmax100,学生t 分量的合并阈值为U4,伯努利过程的阈值rm0.5.OSPA 距离需要的参数设置为c1.5,p1,拟Jaccard 距离中目标轮廓点的采样个数为n20.
5.1 厚尾分布条件下的星凸形多扩展目标跟踪
本部分利用在设定场景中选择的3 种算法对不同形状的扩展目标进行滤波,通过对比3 种算法滤波后的目标势、质心位置和形状估计的精确度验证本文所提算法的有效性.根据构建的仿真场景,多扩展目标参数如表1 所示.
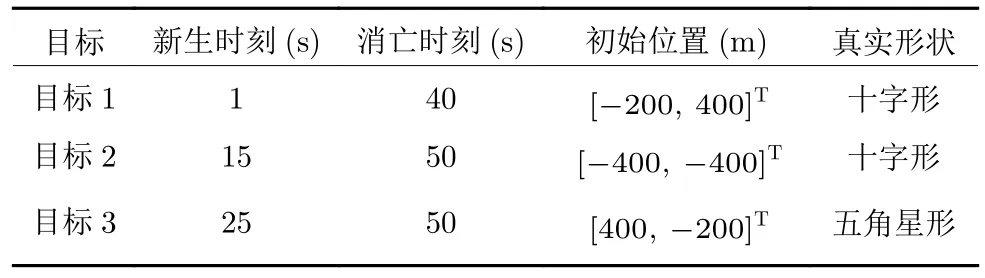
表1 多扩展目标的初始参数Table 1 Initial parameters of multiple extended target
图2 是单次蒙特卡罗实验中所选用的3 种不同算法对不同形状扩展目标的跟踪轨迹图.观察可得,在厚尾噪声条件下这3 种算法都能较为准确地对多个运动的目标进行跟踪.为了能更明确地观察3 种滤波算法的准确性,本文给出了如图3 所示的目标新生时刻和消亡时刻的各种滤波算法对目标的形状估计的局部放大图.其中,图3(a),3(c),3(e)分别为3 个目标新生时刻各种滤波算法的形状估计局部放大图(横轴和纵轴坐标单位都为m),可以看出,由于初始时刻目标形状的先验信息未知,3 种滤波算法对目标的形状估计都不精确.而图3(b),3(d),3(f)分别表示3 个目标消亡时刻各种滤波算法的形状估计局部放大图.经过多次滤波后,通过最优滤波的有效工作,在滤波的最终阶段,3 种滤波算法都对星凸形的目标轮廓进行了一定程度的估计.但可以看出,由于受到厚尾噪声的影响,GM-CKFECBMeMBer 滤波不如学生t 混合实现精确,在应对高度非线性的RHM 伪量测方程上,本文提出的算法有更好的鲁棒性.所以直观上看,本文所提算法相较于其他两种算法而言对扩展目标形状,尤其是形状的局部轮廓特征的估计精度更高.
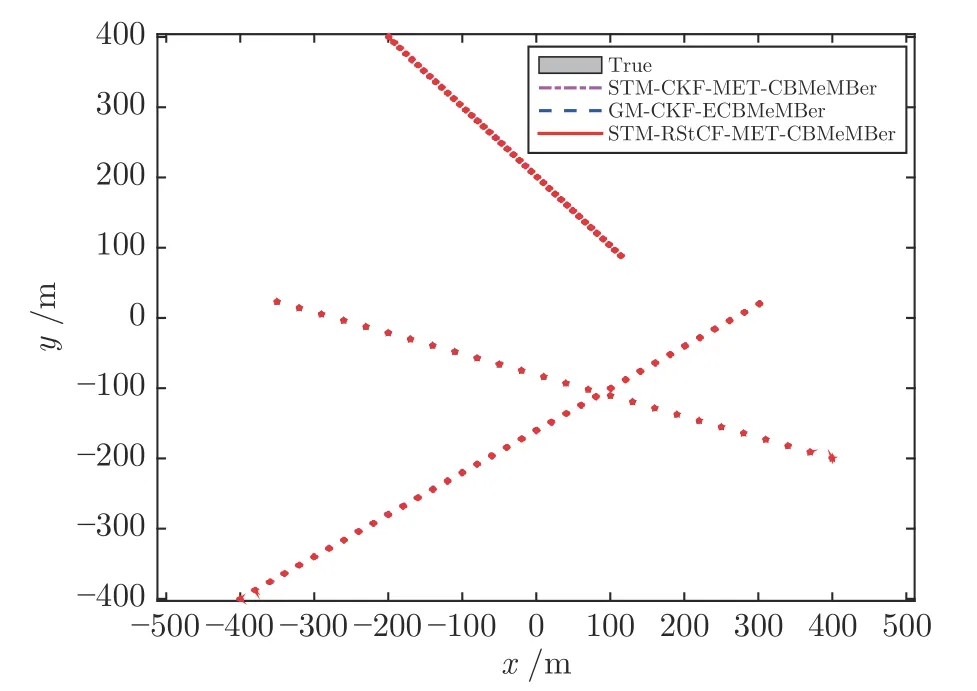
图2 多扩展目标的跟踪效果图Fig.2 The tracking result of multiple extended target
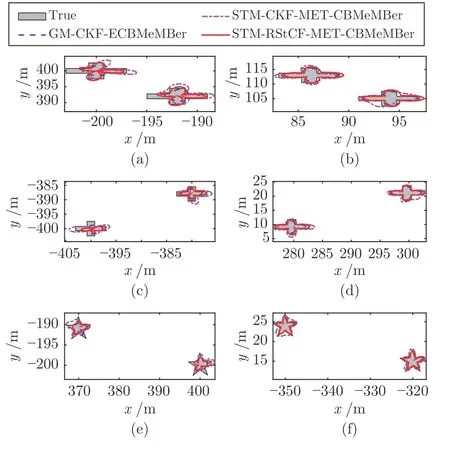
图3 形状估计局部放大效果图Fig.3 The partial enlarged effect for shape estimation
图4和图5 分别为经过100 次独立的蒙特卡罗仿真后得到的3 种滤波算法对多扩展目标的势估计和质心估计OSPA 距离的统计值.观察图4 可得,在厚尾噪声条件下3 种滤波算法对目标的势估计都是准确无偏的,这与ECBMeMBer 滤波算法对目标数目估计的无偏性保持一致.对比图5 中的质心估计OSPA 曲线可得,本文所提算法的OSPA 距离总体相对最小.由此表明,在厚尾噪声条件下本文所提算法对多扩展目标的实时位置的估计更为准确.
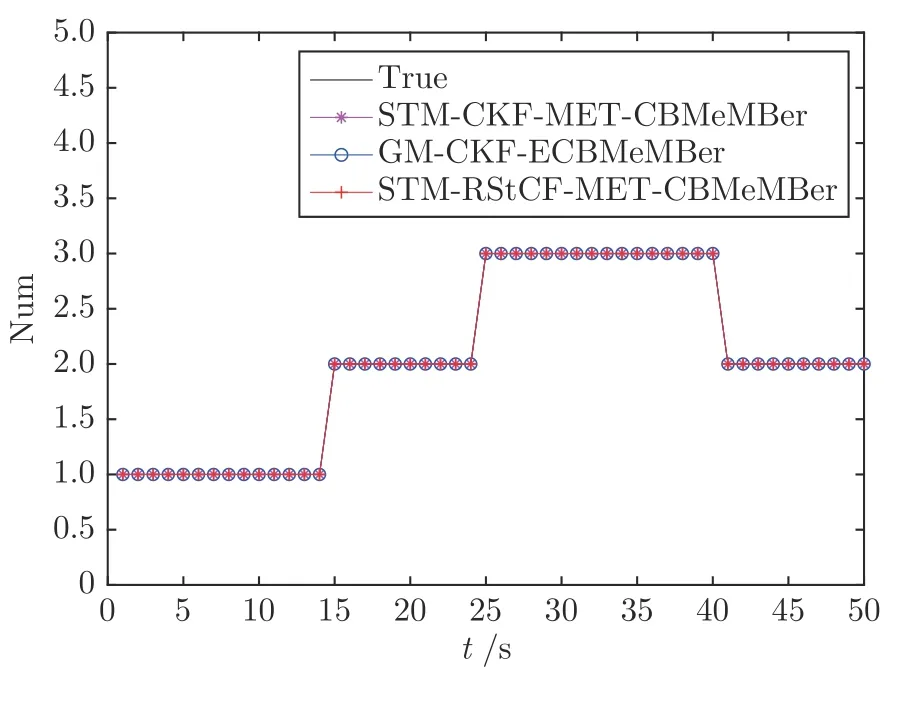
图4 多扩展目标的势估计图Fig.4 Cardinality estimation of multiple extended target
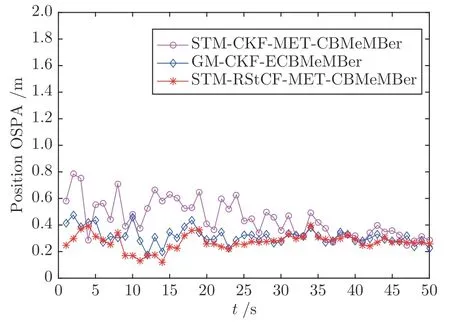
图5 多扩展目标质心位置估计的OSPAFig.5 OSPA statistics of the centroid position estimation of multiple extended target
图6 为3 种不同滤波算法对多扩展目标形状估计的拟Jaccard 距离(目标形状估计效果),由于拟Jaccard 距离可以定量分析不规则形状的估计精度,所以明显看出本文算法对目标轮廓细节的估计效果是最优的.根据图中形状估计评价可以看出,GMCKF-ECBMeMBer 的拟Jaccard 距离最大,这就说明GM 实现方法对厚尾噪声的情况确实缺乏鲁棒性.在t=1 s,t=15 s,t=25 s 时由于新生目标的出现会使形状估计的结果出现波动,进而导致拟Jaccard 距离发生剧增,但随着滤波次数的递增会逐渐再次趋于稳定.图6 表明,无论目标如何随机变化,本文算法的拟Jaccard 距离评价都要优于其他算法.由此,本文滤波算法对多扩展目标形状估计的稳定性和有效性得到验证.
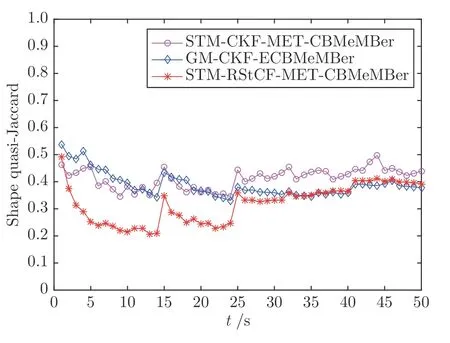
图6 多扩展目标形状估计的拟Jaccard 距离Fig.6 Quasi-Jaccard distance of the shape estimation of multiple extended target
5.2 厚尾分布条件下的多群目标跟踪
群目标是由相似运动属性的一群点目标所构成,本文仍然利用提出的方法验证其对多个群目标跟踪的效果,以下构造群目标跟踪的实验仿真场景.构造3 个星凸形群目标,其中每个星凸形群目标由20 个运动状态相同的子目标构成,其形状分别构造为星凸形和矩形.同样在式(76)和式(77)构造的厚尾噪声条件下利用3 种滤波算法对多群目标的目标数、目标运动状态以及目标形状轮廓进行估计,从而验证本文所提算法对多群目标跟踪的有效性.
图7 是经过单次蒙特卡罗仿真实验得到的利用3 种不同算法对不同形状的星凸形群目标的跟踪轨迹图,观察可得在厚尾噪声条件下这3 种算法都能较为准确地对多个运动的群目标进行跟踪.为了能更明确地观察3 种算法的跟踪准确性,本文给出了如图8 所示的目标新生时刻和消亡时刻的各个滤波算法对各个群目标的形状估计的局部放大图.其中,图8(a),8(c),8(e)分别为3 个群目标新生时刻滤波算法的形状估计局部放大图.在纵轴和横轴都以m 为单位的二维坐标平面中观察不同算法估计的目标轮廓与目标真实轮廓的距离.可以看出,由于初始时刻目标形状的先验信息未知,在滤波的初始时刻3 种滤波算法对群目标的形状估计都不精确.图8(b),8(d),8(f)分别表示3 个目标消亡时刻滤波算法的形状估计局部放大图.随着滤波次数的增加,量测信息累积而且滤波器的最优估计发挥了作用,在滤波的最终阶段,3 种滤波算法都对星凸形目标轮廓进行了一定程度上的估计.但还是可以看出,在厚尾噪声条件下本文提出的算法相较于其他两种算法而言对群目标轮廓特征的估计精度更高.由此验证了该算法对多群目标跟踪的有效性.
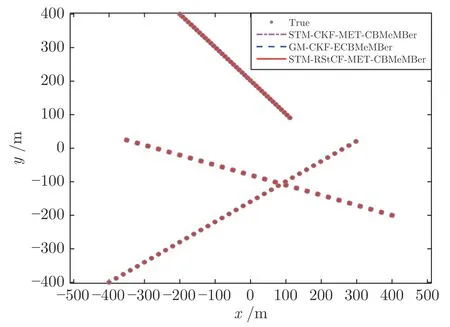
图7 多群目标的跟踪效果图Fig.7 The tracking result of multiple group target
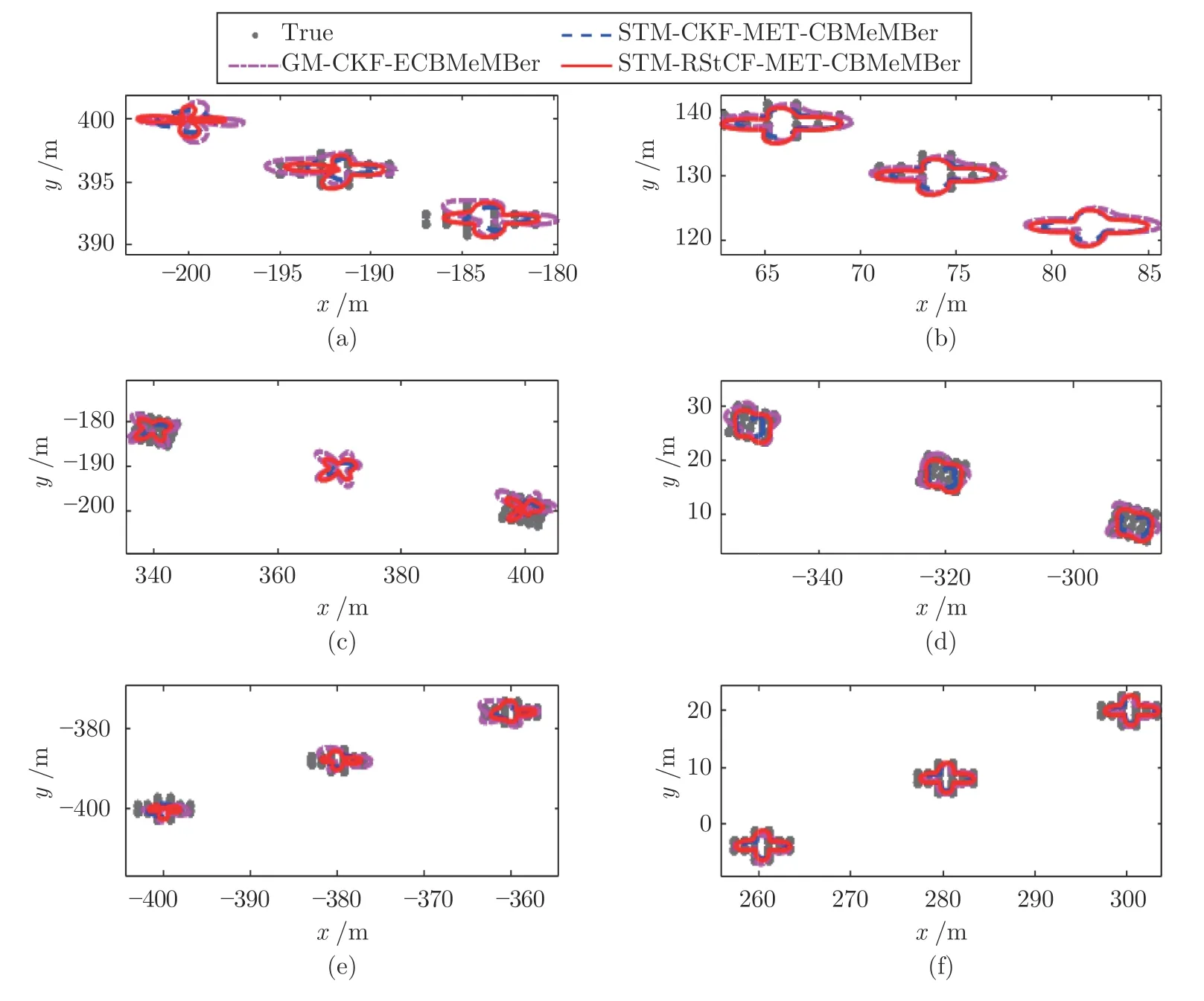
图8 多群目标跟踪形状估计局部放大效果图Fig.8 The partial enlarged effect for shape estimation of multiple group target tracking
图9和图10 分别是独立的100 次蒙特卡罗仿真实验下得到的3 种滤波算法对多扩展目标的势估计图和质心估计OSPA 距离的统计值.观察图9 可得,在厚尾噪声条件下,3 种滤波算法对多群目标的势估计都具有无偏性.对比图10 中的质心估计OSPA距离曲线可得,本文算法的OSPA 距离最小,再次验证了提出算法对于多群目标整体运动状态估计最为准确有效.
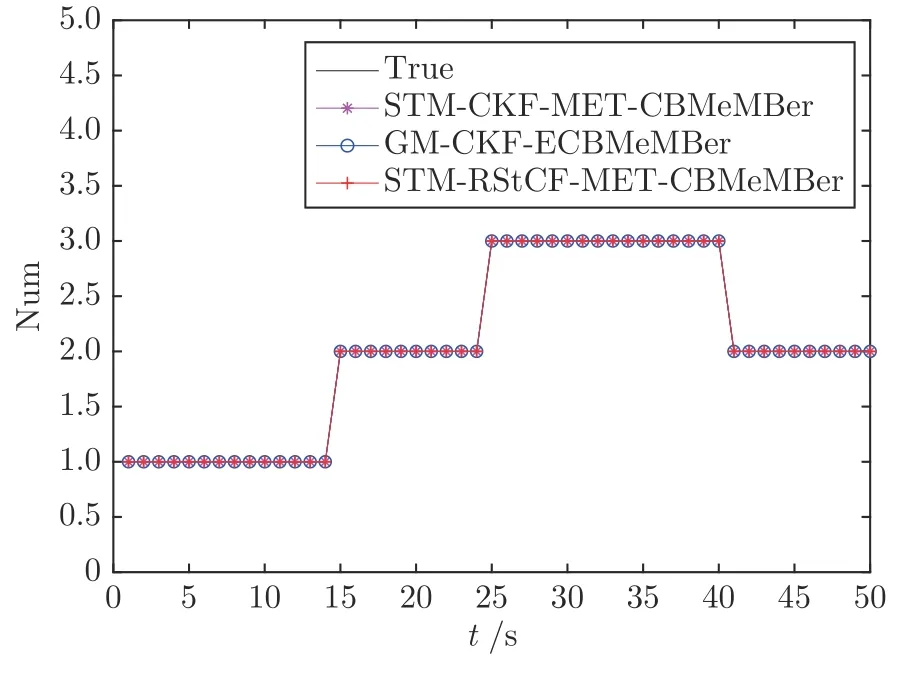
图9 多群目标跟踪的势估计Fig.9 Cardinality estimation statistics of multiple group target
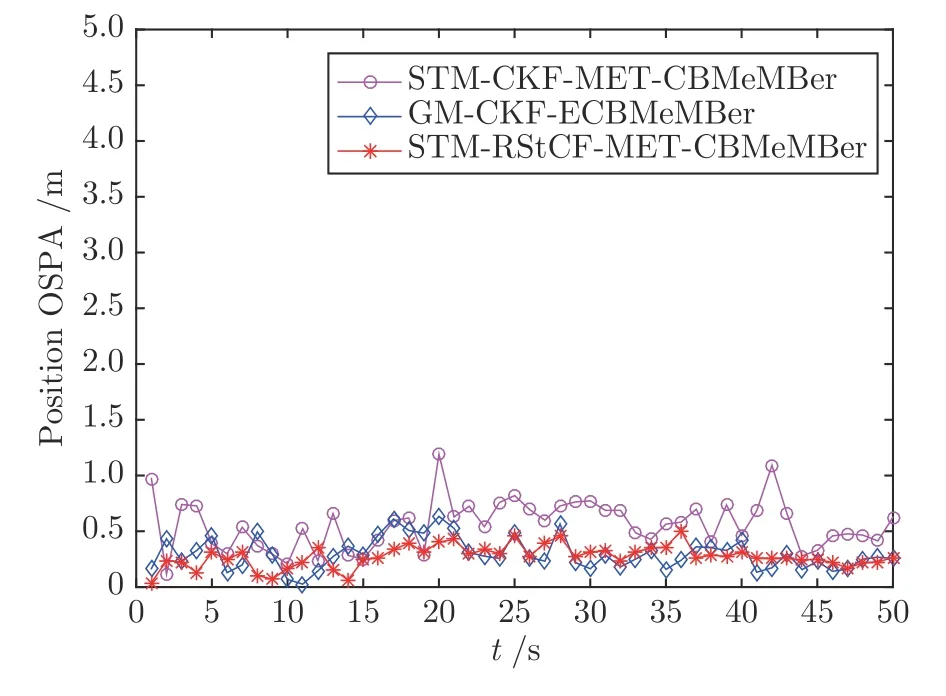
图10 多群目标质心位置估计的OSPAFig.10 OSPA statistics of the position estimation of multiple group target
图11 为3 种算法对多群目标形状估计的拟Jaccard 距离,图中显示3 种方法都能在一定程度上估计各个群目标的局部轮廓特征.根据曲线位置可以明显看出,本文算法对多个群目标的不规则形状估计更加精确.在t=1 s,t=15 s,t=25 s时由于新生群目标的出现会使得拟Jaccard 距离发生剧增,但随着滤波次数的递增会逐渐再次趋于稳定.而无论目标如何随机变化,相较于其他方法,本文所提算法都能更加准确稳定地跟踪各个群目标的外形轮廓,这对于编队作战的目标群的跟踪和识别,具有非常重要的现实意义.
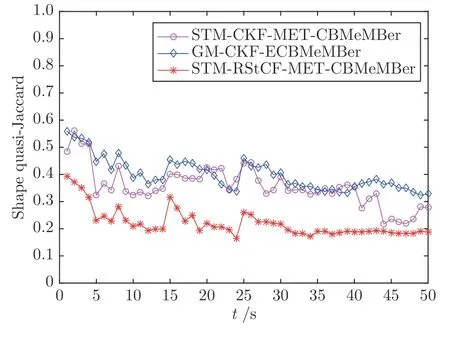
图11 多群目标形状估计的拟Jaccard 距离Fig.11 Quasi-Jaccard distance of the shape estimation of multiple group target
6 结束语
本文的主要创新点在于研究了复杂不确定性环境下受厚尾噪声影响的星凸形多扩展目标跟踪问题,提出了厚尾噪声条件下学生t 混合多扩展目标多伯努利滤波算法,在此基础上进一步提出非线性鲁棒学生t 混合星凸形多扩展目标多伯努利滤波算法.最终,针对具有不规则形状的多扩展(群)目标跟踪仿真实验验证了所提方法的有效性.在今后的研究中,为了使滤波器更适应不确定性环境,可进一步研究检测概率不满足恒定假设的厚尾噪声下的多扩展目标滤波器.
