基于UWB 技术的无轨胶轮车行车安全距离检测预警
2023-08-04韩燕南
韩燕南
(1.中煤科工集团常州研究院有限公司,江苏 常州 213015;2.天地(常州)自动化股份有限公司,江苏 常州 213015)
目前在我国西北地区千万吨高产高效矿井尤其是斜井开拓的矿井已普遍采用无轨胶轮车的“点到点”运输工艺[1-4]。此运输工艺具有易维护、机动灵活、安全稳定等特点,在煤矿安全生产过程中具有举足轻重的作用。但井下巷道结构复杂[5]、敷设管道众多、光线昏暗,是个环境恶劣的狭小作业空间[6-7]。无轨胶轮车受自身结构所限,存在视野盲区,易给来往车辆或同向车车辆发生碰撞事故。为此,在《煤矿安全规程》三百九十二条第六款规定中在煤矿采用无轨胶轮车运输时,应当遵守同向行驶车辆必须保持不小于50 m 安全运行距离的硬性规定。
许多学者对无轨胶轮车(以下简称车辆)运输安全的实现方式进行了研究。王晓云[8]提出采用在井下运输巷道安装智能红绿灯报警装置,提示司机注意来往行驶的车辆及行人,但该装置功能较为单一,缺少安全距离预警判断机制;丰继伟[9]提出对无轨胶轮车采取智能化控制设计,通过安装行车区间闭锁装置、交叉路口信号灯、测速仪和红外线阻车器等装置,该系统着重解决了交叉路口的交通控制功能,但无法满足煤矿安全规程中关于同向安全运行距离的规定;郭海军等[10]提出采用射频识别技术实现井下车辆定位跟踪、通过定位位置信息控制区间路段交通灯,该系统解决了区间内的车辆安全问题,但缺乏跨区间的车辆安全预警逻辑。
针对上述问题,设计了基于UWB 技术的无轨胶轮车行车安全距离检测预警方法,为智能辅助运输一体化系统中车辆安全距离预警播报功能提供判定逻辑,以满足《煤矿安全规程》中关于行车安全距离的相关规定。该方法首先利用巷道中线点之间的邻接关系构建出巷道拓扑网络;其次,利用车辆相邻时刻的精确定位数据确定车辆行进方向;再次,采用空间和路网2 级检索方式,检索出安全距离范围内的可疑对象;最后,对可疑车辆的行进方向与实际路径方向做匹配,确定预警对象。
1 设计方案
1.1 物理结构
物理结构如图1。
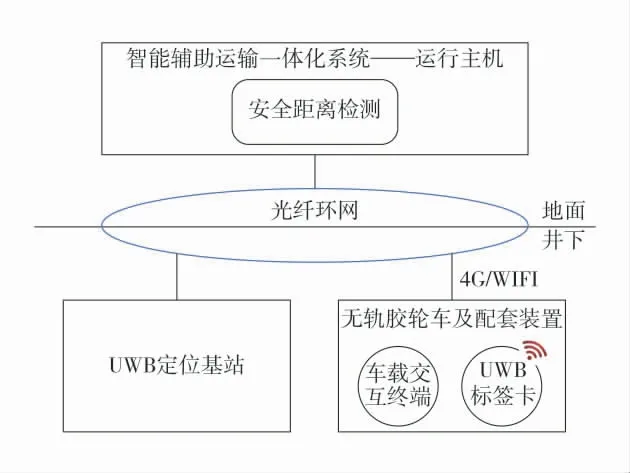
图1 物理结构Fig.1 Physical structure
方案的物理结构是由地面和井下2 部分组成。井下部分均采用智能辅助运输一体化系统(以下简称辅运系统)中基础的硬件和装置,主要有UWB 定位基站、无轨胶轮车配套的车载交互终端和UWB标签卡,以及井下环网构成;地面部分是将含有安全距离检测功能的辅运系统部署至运行主机中。
UWB 定位基站轮询扫描车辆UWB 标签卡信号,获取车辆实时位置数据,并通过井下环网传输至地面服务器中。车载交互终端通过4G/WIFI 与井下环网连接,实现安全预警播报和完成人机交互操作。安全距离检测功能实时计算出井下每辆车当前安全距离范围内的移动目标,通过环网通知车载交互终端实现语音播报。
1.2 安全距离检测逻辑
处理逻辑分为初始化和运行2 个阶段:在初始化阶段中实现巷道拓扑网络构建;在运行阶段中实现车辆行进方向计算、安全距离检索和方向匹配3项功能。处理流程如图2。
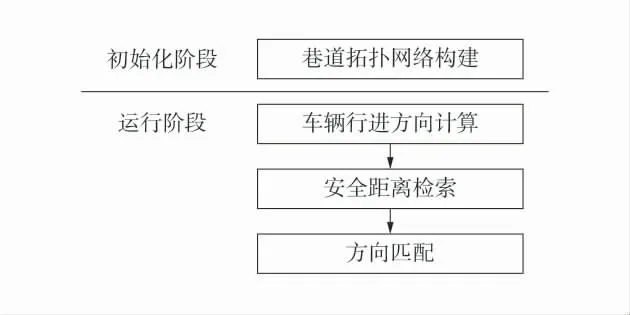
图2 处理流程Fig.2 Process flow
1)巷道拓扑网络构建。巷道信息是由具有三维地理空间坐标的中线点组成,需要对离散的中线点数据进行拓扑关联计算,形成具有连续特征的巷道拓扑网络结构,得到巷道路网结构。
2)车辆行进方向计算。依据车辆相邻时刻的运动变化量与巷道拓扑走向之间的空间方位变换确定车辆行进方向,再根据变换结果的正负性得出车辆行进方向所在巷道中线点。
3)安全距离检索。依据车辆所处巷道的安全距离配置参数,采用空间及路网两级检索方式,确定当前车辆前进方向安全距离范围的可疑移动目标对象。此处的路网数据是依据步骤1)中所得的巷道拓扑网络。路网检索采用的是弗洛伊德(Floyd)最短路径核心思想。
4)方向匹配。首先,计算可疑车辆的行进方向。其次,利用当前车辆行至可疑车辆处的最短路径与可疑车辆的行进方向做匹配。最终,得出该可疑车辆是否为需预警对象的结果。
2 功能实现
2.1 巷道拓扑网络构建
巷道拓扑网络数据结构图3。

图3 巷道拓扑网络数据结构Fig.3 Data structure of roadway topology network
该拓扑网络数据结构是由巷道拓扑网络和中线点数据结构2 部分组成。其中,巷道网络由多条巷道中线构成,每条巷道中线由2 个中线点a 和b(a和b 代表中线点索引Index)构成;中线点数据结构包括了坐标、中线点索引Index 和邻接点关联数组,邻接点关联数组中存储的是所有与当前中线点存在拓扑关系的中线点索引。
巷道网络拓扑构建流程如图4。
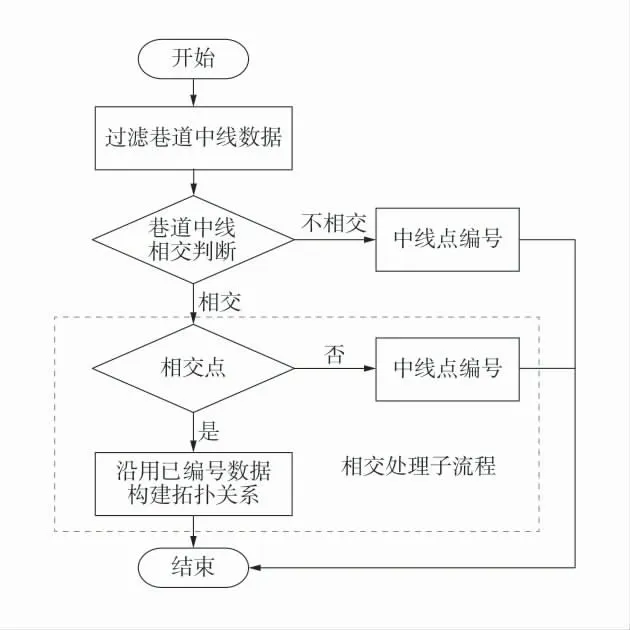
图4 巷道网络拓扑构建流程Fig.4 Construction process of roadway network topology
1)第1 步。对巷道中线点数据进行过滤,去除非法数据。
2)第2 步。计算巷道中线相交关系,若相交进行第3 步处理,反之对中线点a 和b 进行唯一编号。
3)第3 步。对中线点a 和b 判断是否为相交点。若是相交点,沿用已编号序号,并与已编号数据生成拓扑关系。反之对中线点a 和b 进行唯一编号。
按照上述步骤,完成对中线点数据的处理,最终构建出完整的巷道拓扑网络。
2.2 车辆行进方向计算
通过向量内积结果的正负判断车辆行进方向是中线点a 或b。计算原理如图5。图中:Ti-1为当前车辆的前一时刻位置;Ti为当前车辆的位置,Ti在巷道AB 上。
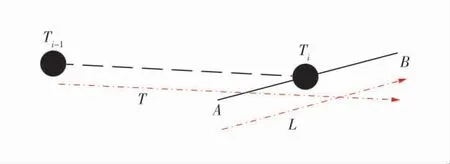
图5 计算原理Fig.5 Principle of calculation
思路为:①构建车辆运动变化量T:T= Ti-Ti-1;②构建巷道走向L:L=B-A;③确定车辆的前进方向是A 还是B,若T※L>0,为B,反之,为A。
计算公式为:
式中:direction 为车辆行进方向的中线点,Ti-1Ti为车辆行进变化量,AB 为车辆当前所在巷道方位向量,由组成该巷道的2 个中线点决定。
在此方法中,仅用到了乘法和比较运算,未用到除法运算或三角函数运算,避免了高昂的计算代价和容易产生舍入误差等问题。
2.3 安全距离检索
依据车辆所处巷道的安全距离参数,实现空间和路网2 级检索方式,确定当前车辆前进方向安全距离内的移动目标。
2.3.1 空间检索
空间检索示意图如图6。图中:Ti为当前车辆位置;T1~T5为巷道中其他车辆。以当前车辆位置为圆点,安全距离为半径,构建1 个圆形空间区间,将落在此空间内的移动目标列为可疑对象。
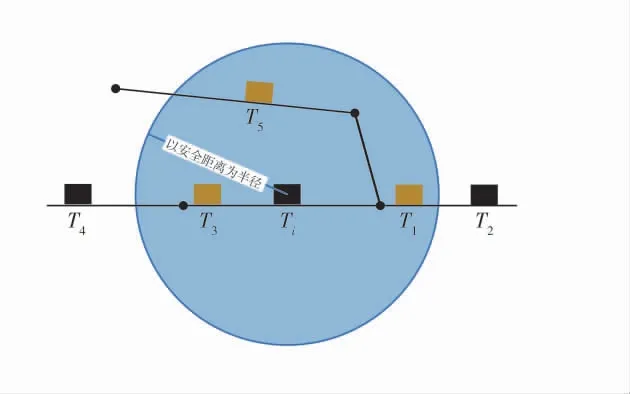
图6 空间检索示意图Fig.6 Schematic diagram of spatial retrieval
由图6 可知:T1、T3、T5属于此空间区间内。空间检索采用GIS 领域标准的点缓冲区分析方法实现。
2.3.2 路网检索
对空间检索出的可疑对象进行路网方式复检,以确定真正意义上的安全距离内可疑对象。根据路网数据结构以及井下实际情况,当前车辆与可疑车辆的位置关系可分为处于同一巷道内和不处于2 种情况。2 种情况的处理方式存在一定差异。
当前车辆与可疑车辆处于同一巷道内路网检索如图7。图中:Ti为当前车辆的位置;Ts1、Ts2为可疑车辆位置;a、b 为中线点;b 为Ti行进方向中线点;LTib为Ti与b 之间的距离;Ls1b为Ts1与b 之间的距离;Ls2b为Ts2与b 之间的距离。
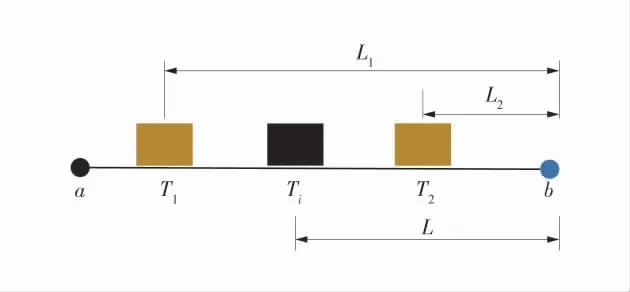
图7 当前车辆与可疑车辆处于同一巷道路网检索情况Fig.7 Road network retrieval state of current vehicle and suspicious vehicle in the same lane
根据当前车辆和可疑车辆到行进方向中线点的距离,可推导出2 车的前或后的位置关系公式为:
式中:pos_relationab为对象a 与对象b 的位置关系;La为对象a 到中线点距离;Lb为对象b 到中线点距离。
由此可得,在图7 中Ts1位于Ti的后面,Ts2位于Ti的前面。依据安全距离须为行进方向的前提条件,Ts2列为可疑对象。
上述中2 个对象间的距离计算公式为:
式中:L 为距离值;(x1,y1,z1)为1#坐标;(x2,y2,z2)为2#坐标。
当前车辆与可疑车辆不处于同一巷道内路网检索情况如图8。图中:Ti为当前车辆的位置;Ts1可疑车辆位置;a、b、c 为中线点;b 为Ti前进方向中线点;a 到c、a 到d 之间存在0~n 条路径;b 到c、b 到d 之间存在0~n 条路径
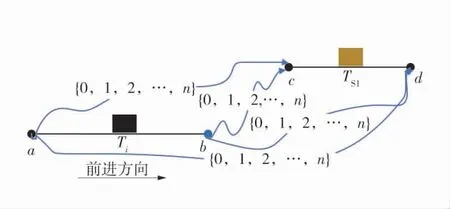
图8 当前车辆与可疑车辆不处于同一巷道内路网检索情况Fig.8 Road network retrieval state of current vehicle and suspicious vehicle in the various roadways
根据上述观察可得:Ti行至Ts1存在4 条路径,分别为:
依据安全距离须为行进方向的前提条件,Ti行至Ts1必须经过中线点b,故由此可得潜在路径为路径①和路径②,通过计算潜在路径的距离,选择最短的1 条作为实际路径。最后,判断实际路径距离值是否满足安全距离要求,最终确定属于安全距离范围内的可疑对象。
潜在路径①和潜在路径②的距离值的计算方法一致,现以路径①为例进行阐述。距离值的计算公式为:
式中:L(Ti,b)为Ti至b 距离;L(b,c)为b 至c距离;L(c,Ts1)为c 至Ts1距离。
L(Ti,b)和L(c,Ts1)为2 点直线距离,采用式(3)进行计算,L(b,c)为任意2 点距离,采用弗洛伊德(Floyd)最短路径算法思想。
2.4 方向匹配
采用车辆行进方向计算,得出可疑车辆行进方向中线点。其次,判断当前车辆行进方向与可疑车辆行进方向进行匹配。最终,得出是否预警的结果。在方向做匹配时,基于此前分析可得,当前车辆与可疑车辆的位置关系可分为处于同一巷道内和不处于2 种情况,在本阶段需要分情况处理。
1)前车辆与可疑车辆处当于同一巷道内方向匹配。当前车辆与可疑车辆处于同一巷道方向匹配情况如图9。图中:Ti为当前车辆的位置;Ts2为可疑车辆位置;a、b 为中线点;b 为Ti前进方向中线点。基于图9 观察可得:当可疑车辆Ts2的行进方向中线点为a 时,与Ti处于敌对方向;当行进方向中线点为b时,与Ti处于同向。由此可推导出:可疑车辆行进方向中线点与当前车辆一致时,属于同向,反之属于敌对的结论。
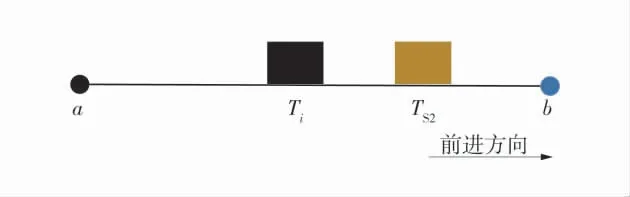
图9 当前车辆与可疑车辆处于同一巷道内方向匹配情况Fig.9 Direction matching state of current vehicle and suspicious vehicle in the same lane
2)前车辆与可疑车辆不处于同一巷道内方向匹配。当前车辆与可疑车辆不处于同一巷道内方向匹配情况如图10。图中:Ti为当前车辆的位置;Ts1为可疑车辆位置;a、b、c、d 为中线点;b 为Ti行进方向中线点;Ti至Ts1路径为Ti→b→c→Ts1。基于图10 观察可得:可疑车辆Ts1的行进方向中线点为c 时,属于敌对方向,行进方向中线点为d 时,属于同向。由此可推导出:可疑车辆行进方向中线点属于最短路径点时属于敌对方向,反之属于同向。

图10 当前车辆与可疑车辆不处于同一巷道内方向匹配情况Fig.10 Direction matching state of current vehicle and suspicious vehicle in the various roadways
3 试验验证
3.1 模拟巷道试验
模拟巷道内部共4 条巷道,组成2 个3 岔路口和1 个U 形弯路口,内部安装有4 个UWB 精确定位基站。从西门开始,选取200 m 道路作为试验路段。模拟巷道试验环境如图11。
采用3 张车辆UWB 标签卡模拟车辆在巷道内不同位置进行移动,根据车辆间的位置关系和应用程序输出日志检验所提方法逻辑的准确性和实时性。方法逻辑的准确性是通过方法中的车辆行进方向计算和安全距离检索+方向匹配2 大项单独验证构成。实时性是累加前述2 项验证的平均耗时。
1)车辆行进方向计算。车辆从西门进入,在到达第1 个路口后,朝西巷道行进,随后转入南巷道,最终行至东巷道与北巷道的路口。车辆移动过程中采用匀速行进和变速行进2 种方式。经目测与程序日志输出结果对比,车辆预期行进方向理论值与程序日志输出结果保持一致。试验结果表明:该逻辑判断方法正确,经耗时时间统计,平均耗时为15 ms。
2)安全距离检索+方向匹配。将巷道的安全距离设置为:①ab 巷道20 m;②bc 巷道100 m(用于模拟2 车处于同一巷道内和不处于同一巷道内的情况);③cd 巷道100 m;④de 巷道50 m(用于模拟安全距离无法覆盖的情况)。3 张车辆UWB 标签卡标注为车A、车B、车C,以车B 为当前车辆,车A 在前,车B 在中间,车C 在最后的顺序依次从西门进入巷道内。试验结果如下:①车A 行至bc 巷道内,车B 进入ab 巷道:程序安全距离检索模块输出无可疑对象;②车A 停留在bc 巷道,车B 进入bc 巷道:此时车B 和车A 属于同一巷道情况,程序安全距离检索模块输出可疑对象为车A,方向匹配模块输出车A 为需预警对象;③车A 进入cd 巷道,车B停留在bc 巷道:此时车B 和车A 属于不处于同一巷道内情况,程序安全距离检索模块输出可疑对象为车A,方向匹配模块输出车A 为需预警对象;④车B 停留在bc 巷道内,车C 从西门ab 巷道进入,直至行至bc 巷道内:此时车C 位于车B 后面,受安全距离检索仅搜索车辆行进方向的规则,程序安全距离检索模块未输出可疑对象车C;⑤车B 停留在bc 巷道内,车A 在cd 巷道内往c 点行进:程序安全距离检索模块输出可疑对象为车A,方向匹配计算车A 与车B 行进方向为敌对方向,不属于预警对象;⑥车A 进入de 巷道,行至e 点处,车B 行进至d点处:受安全距离所限,程序安全距离检索模块输出无可疑对象。经上述6 种方法实验,试验结果表明:预期理论值与程序逻辑一致,该逻辑判断方法正确;经耗时时间统计,平均耗时为125 ms。
通过对所提方法的单项进行验证,所提方法的相关逻辑均为正确;逻辑判断平均耗时约为140 ms,满足现场实际应用要求。
3.2 现场验证
新疆伊犁能源伊犁四矿使用无轨胶轮车执行井下运输任务,在录车辆约为47 辆,选择车流量较大的23-2 煤层辅助运输大巷作为试验路段,该路段连接着缓坡斜井和工作面,是运输车辆日常出入井的必经之路。试验路段全长约为2 km,部署有6 个UWB 定位基站,全程UWB 信号覆盖,布置图如图12。图中红色标注部分为本次试验路段,绿部分为UWB 定位基站位置。
通过GIS 二维图中测距工具,获得2 个车之间的距离关系;通过目测,获得2 车间的行进方向属于同向或敌对。观察一段时间的运行状态,结果显示:所提方法逻辑正确,平均耗时约为140 ms。
4 结 语
1)车辆行进安全距离检测,在初始化阶段完成巷道拓扑网络构建。在运行阶段,首先,借助UWB精确定位基站获知车辆实时位置,依据车辆相邻时刻位置关系,明确车辆行进方向;其次,在空间和路网双重安全距离检索下获得可疑车辆;再次,依据当前车辆和可疑车辆行进方向匹配结果,确定需要预警的对象;最后,通过车载交互终端发出语音预警信息。
2)检测方法在模拟巷道的试验结果表明:逻辑代码运行正常,逻辑响应时间约为140 ms。具有功能稳定、实时性高的特点。
3)在新疆伊犁四矿现场的试验结果表明:现场应用状况良好,车辆行进安全风险管控效果显著。具有以下3 项特点:①安全距离灵活可配、管控精细化:可依据巷道的特征和风险情况,为不同巷道配置个性化的安全距离,使得安全管控精细化;②低成本:整套技术方案无需额外加装硬件装置,完全借助软件实现,为项目实施节省成本;③实用性:检测方法性能稳定、运行实时性高,可满足《煤矿安全规程》的要求。