数码相机与GNSS集成的河道陡岸船载测量方法研究
2023-07-25李树明严丽英蒋建平杨彪
李树明 严丽英 蒋建平 杨彪

摘要:针对无人机遥感及船载LiDAR技术在河道陡岸地形测量中存在的作业风险大、成本高等问题,提出了一种消费级数码相机与GNSS集成的船载摄影测量方法。该方法通过传感器与PC机组网、Socket编程,实现持久续航能力的全自动数据采集;通过研究自检校光束法与传感器标定模型,实现数码影像与GNSS数据融合,解决了移动摄影测量对控制点或高精度惯导的依赖问题;通过研究船载影像数据处理中的自由度消除方法,实现了河道陡岸实景三维重建。在长江典型河段的实例验证结果表明:该方法精度可靠,数据采集高效,数据处理自动化程度高,可实现水陆一体化测绘,并具有低成本、易操作等显著优势。
关 键 词:船载摄影测量; 数码相机; GNSS; 河道测量; 移动测量
中图法分类号: P237 文献标志码: ADOI:10.16232/j.cnki.1001-4179.2023.06.017
0 引 言
河道地形资料是水利工程开发、防洪减灾、水资源利用与保护、水土保持与治理的基础地理信息[1-3],其测量主要包括水下和岸上地形测量。随着多波束测深技术的应用,水下地形测量的效率与自动化水平已达到了较高水平。然而,岸上地形测量仍然是困扰广大测绘与水文工作者的难题[4-5]。尤其在陡岸地区,地形条件复杂,采用传统的全站仪、实时动态测量(Real-Time Kinematic,RTK)等地面接触式测绘方法,存在交通条件差、难以到达、安全风险大等问题[6-7],且这种点的测量方式由于特征点、线不易把握,导致测量效率和成图精度低[8]。
近年来,无人机低空遥感技术的发展为岸滩地形测绘提供了新的手段,能有效降低作业人员安全风险。其中,无人机摄影测量能精细重建地表实景三维模型,形象直观、成果丰富[9];無人机激光雷达(LiDAR)具有一定的植被穿透性,采用多回波技术在植被密集的平原河道地形测量中具有显著精度优势[10-11]。然而,高山峡谷等河道由于常态风力超出普通无人机的抗风能力,面临着巨大的设备安全风险。另外,无人机续航能力有限,应用于长程、线型河道岸滩地形测量时,数据获取代价相对较高。由于河道水上地形测量常伴随水下地形测量,实际应用中船载测量方式往往比空基方式的数据采集代价更小、续航能力更长,可实现水陆地形测绘一体化,尤其应用于陡岸地形测量时,船载方式还具有更好的观测视角。近年来,国内外学者们对船载LiDAR水陆一体测量系统进行了深入的研究[12-14],在船体固定安装地面三维激光扫描仪,并通过标定激光扫描仪与多波束测深系统惯性导航单元的角度安装误差,来获取扫描仪的瞬时姿态,从而实现船载移动测量[15-16]。但该技术因硬件成本高、安装与标定难度较大,限制了其推广应用。
本文针对现有方法的不足,集成消费级数码相机、船用GNSS与PC机,提出一种河道陡岸船载摄影测量新方法;通过研究传感器标定、自动化数据采集、数据融合处理方法,实现陡岸实景三维模型重建。
1 方 法
1.1 设备安装
常规的摄影测量须在物方均匀布设并测绘像控点,在河岸地区通常难以实施。为解决这一问题,本文尝试集成普通数码相机与船用GNSS,通过GNSS测定数码影像瞬时拍摄位置,采用像方控制模式来实现河道陡岸地形的移动测绘。将数码相机和GNSS分别固定安装在测船的船舱侧壁和舱顶,如图1所示。设计制作一款带有强力磁铁底座的云台,将数码相机牢固吸附在船舱一侧铁板上。为保证数码相机的持久续航能力,用电源适配器与船舱电源相连,直接给数码相机供电。船用GNSS是一个模块化、双天线、无基站的移动测量系统,利用星站差分技术,可实时测定船舶的位置和航向,是普通测船的标配[17]。与RTK和CORS等网络差分技术相比,星站差分GNSS不受控制半径和跨省等地域差别与网络通讯限制,可实现百公里以上长程河道测绘。
1.2 设备集成与全自动数据采集
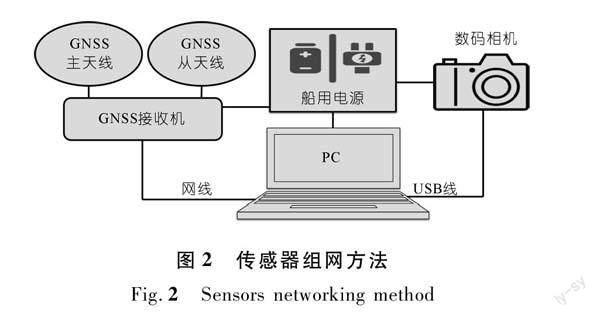
为实现全自动数据采集,将数码相机、GNSS与一台PC机组网,并通过端口编程控制数据采集。如图2所示,数码相机、GNSS分别通过USB数据线和网线与PC机相连,通过Socket编程开发一套传感器控制软件,基于TCP/IP通信协议和NMEA 0183标准协议,以20 Hz以上频率自动接收GNSS数据至电脑。当风浪较大时,可将GNSS数据采集频率调整至50 Hz以上。同时,按设定时间间隔驱动相机快门进行拍摄,并将数码影像直接存储到PC机。以PC机时间为基准,统一各传感器数据采集时间,便于时序数据配准。
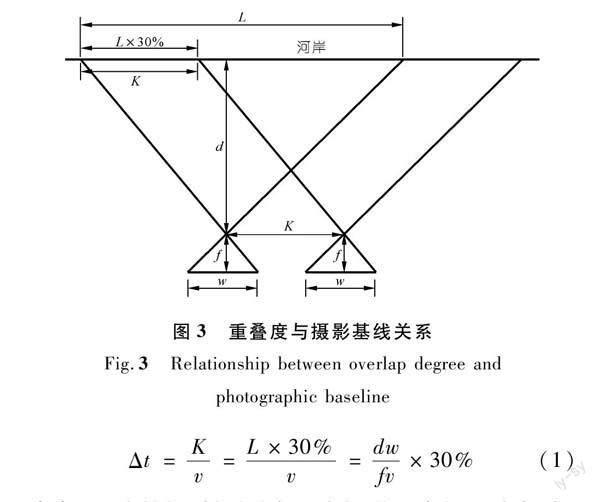
根据中心投影原理,像片重叠度(以70%为例)与摄影基线的关系如图3所示。为保证数码影像之间达到航向重叠度要求,数码相机自动拍摄程序可按式(1)自动设置拍摄时间间隔。
式中:Δt为拍摄时间间隔;K为摄影基线长;v为船速;L为单幅照片覆盖的岸线长度;d为拍摄距离;w为像幅宽度;f为相机主距。
对于视野不开阔、山体凹凸景深大的复杂河道,宜采用伺服电机旋转云台或多台相机倾斜摄影模式采集影像。
1.3 传感器标定
数码相机与GNSS安装位置不同,为实现GNSS位置到相机位置的转换,须对两类传感器相对位姿进行标定。数码相机与GNSS相对位姿关系如图4所示,图中坐标系EON表示大地坐标系。标定时,建立一个参考坐标系统XAY(右手系),以GNSS定位天线A(主天线)为原点,主天线指向从天线B(定向天线)方向在水平面上的投影为Y轴,X轴与Y轴垂直,Z轴铅垂向上。在该坐标系下,GNSS定位天线中心A与数码相机投影中心C的关系可用相对坐标ΔX、ΔY、ΔZ来表述,则GNSS与数码相机位置转换关系如式(2)所示。
1.4 陡岸摄影测量
陡岸采用多基线方式摄影,相机基本正对河岸拍摄,避免过大的交向角。为避免相机对焦模糊和运动模糊,将相机调至AV(光圈优先)模式或手动模式,首张照片采用自动对焦模式拍摄,再固定相机焦距并锁定对焦位置拍摄后续照片,保持所有照片的相机内方位元素与畸变参数一致,以减少未知参数,从而缓解数据处理压力。
由摄影测量原理可知,已知大地坐标系中n(n≥3)个不共线的像片拍摄位置,与已知n个不共线的像控点等价,即可将三维模型进行绝对定向,转换到大地坐标系。反之,若航线完全呈一条空间直线分布,如图5所示,则三维模型在艏摇和纵摇方向不存在自由度,但在横摇方向存在一个自由度,空中三角测量(空三)解算时,将导致平差系统的法方程系数矩阵出现秩亏或病态问题,无法确定模型或投影光线在该方向的旋转角度。为克服这一问题,平直河岸数据采集时应布设“S”形航线,或分不同离岸距离的往返两条航线对岸坡进行摄影。如不计相机成本投入,亦可在不同高度或垂直于航线不同距离位置安装两台数码相机进行摄影。
陡岸摄影测量数据处理流程如下:
(1) 读取GNSS位姿数据,根据定位状态,剔除低精度导航数据,再将经纬度坐标转换为高斯平面直角坐标,恢复时序航迹。
(2) 通过解析数码影像文件内核时间,获取其毫秒级精度的准确拍摄时间,再采用线性插值法,按时间从GNSS航迹中内插出摄影瞬间的GNSS位姿,再根据标定参数,按式(2)解算每幅数码影像的投影中心坐标,生成规定格式的POS(Position and Orientation System)数据文件;当船体摇晃幅度或相机倾角较大时,可根据GNSS基线方位角和倾角,估算像片旋转矩阵,使空三迭代解算快速收敛到最优解。
(3) 将影像与POS数据文件导入大疆智图、ContextCapture等摄影测量软件,依次进行空三处理、三维重建,生成河岸实景三维模型。其中,空三是决定模型精度的关键环节,有两种处理模式:① POS数据约束的空三模式,该模式将POS数据代入平差模型,仍将照片外方位线元素作为未知参数求解,添加如式(7)所示约束条件,将外方位元素作为观测值,进行约束网平差。平差结果保证外方位元素改正数的平方和达到最小,即尽量维持原外方位元素初值不变。② 后配准模式。该模式先不引入POS数据,仅基于特征点进行空三平差,得到自由坐标系影像外方位线元素。然后,将得到的外方位线元素与POS数据代入式(8)所示刚性变换模型,经最小二乘平差求解模型参数;最后,再利用该刚性变换模型,将自由坐标系影像外方位元素全部转换到POS坐标系。
式中:(Xp,Yp,Zp)为空三平差后得到的自由坐标系像片外方位线元素;λ为刚性变换缩放系数,Rφωκ为三轴旋转角φ,ω,κ确定的旋转矩阵;(X0,Y0,Z0)为坐标系平移参数。
当POS数据误差较小、河岸长度较短时,上述两种空三模式解算结果与精度相当。但当河岸较长,或河岸较平坦、在照片画幅中所占面积比过少时,采用后配准模式将面临空三解算失败风险,或由于拼接误差累积造成模型扭曲,而后处理时采用刚性配准模式不能有效消除非线性变形,导致配准存在较大的误差。因此,长程、线状河岸宜采用POS数据约束的光束法空三模式。
2 实验验证
实验区为长江与鄱阳湖交汇处的江西九江石钟山河段。石钟山为著名旅游景点,河岸山体长约200 m,山顶与水面高差约40 m,岩壁陡峭,坡度角接近90°,近水部分岩石反倾、凹陷,为典型陡岸,无人机空基方式难以有效获取其数据。实验设备为一台Sony ILCE-7M2消费级数码相机和一套Trimble BX982。其中,数码相机采用28 mm定焦镜头,像幅大小为6 000×4 000像素;BX982已开通RTX(Real Time eXtended)服务,可达到±0.1 m移动定位精度和±0.5°定向精度。测船离岸约100 m行驶一条弧形航线,共拍摄17幅数码影像。采用自主研发的全自动数据采集程序,整个数据采集过程1 min内完成。
为验证船载摄影测量精度,岸上测量人员在河岸布设了15个检查点,并采用RTK精确测量其三维坐标作为验证值。数据处理时,将所有数码影像及解算的POS数据导入ContextCapture软件,并将检查点作为人工连接点进行刺点,再进行POS数据约束的空三解算。解算完成后,查看检查点的坐标,与验证值对比,统计坐标误差绝对值,结果如图6所示。對应的坐标中误差与反投影中误差如表1所列,与现有文献[18-20]的船载LiDAR测量精度相当,而其硬件成本不足船载LiDAR的1%。
空三完成后,进行三维模型重建,最终得到的石钟山实景三维模型如图7所示。可见,模型较为完整,无明显扭曲变形,细节丰富,岩石孔隙能准确还原,如图8所示。
3 结 语
本文通过普通数码相机与船用GNSS集成,提出一种免像控、免惯导、免地面基站的河道陡岸船载摄影测量方法,并通过长江典型陡岸河段实验,验证了该方法的可行性与精度。实验结果表明该方法切实可行、精度可靠。与现有方法相比,该方法具有低成本、低风险、易操作、续航持久、数据采集高效等显著优势,可实现水陆一体化测绘。另外,该方法采用像方控制模式,无需量测像控点,因此数据处理时,可免除像控点刺点等人工干预环节,从而大大缩短了数据处理周期,提高了数据处理自动化程度。虽然摄影测量对植被穿透能力较差,但该方法可用于植被覆盖度较低的河道陡岸大比例尺DEM(数字高程模型)提取、地形断面与水边线测绘,同时具有实现河道实景三维数字孪生的良好应用前景。
该方法精度主要取决于GNSS定位定向精度、传感器标定精度、数码影像质量、拍摄距离等,其精度评定方法还有待系统、深入研究。
参考文献:
[1]PEKEL J F,COTTAM A,GORELICK N,et al.High-resolution mapping of global surface water and its long-term changes[J].Nature,2016,540(7633):418-422.
[2]CLEMENT M A,KILSBY C G,MOORE P.Multi-temporal synthetic aperture radar flood mapping using change detection[J].Journal of Flood Risk Management,2018,11(2):152-168.
[3]戴永洪,刘林佳.无人机机载激光雷达在长江中游河道地形测量中的应用[J].水利水电快报,2022,43(增2):13-17..
[4]曹玺,梁俊,王延洪,等. 三维激光扫描技术在地形测绘成图中的应用[J].人民长江,2011,42(21):22-24.
[5]李志鹏,张辛,喻守刚,等.基于三维激光扫描的大比例尺地形测绘方法研究[J].人民长江,2014,45(7):70-73.
[6]王华,蒋建平,周建红,等.船基雷达实时自动化水边界测绘方法研究[J].人民长江,2020,51(11):76-82.
[7]周建红,马耀昌,刘世振,等.水陆地形三维一体化测量系统关键技术研究[J].人民长江,2017,48(24):61-66.
[8]SCOTT D N,BROGAN D J,LININGER K B,et al.Evaluating survey instruments and methods in a steep channel[J].Geomorphology,2016,273(15):236-243.
[9]周建红,杨彪,王华,等.长江中下游河道岸滩低空机载LiDAR点云地形滤波算法[J].河海大学学报(自然科学版),2019,47(1):26-31.
[10]周建红,冯传勇,杨彪.低空机载LiDAR水面点云自适应分类算法研究[J].人民长江,2018,49(18):80-85.
[11]WEI L X,YANG B,JIANG J P,et al.Vegetation filtering algorithm for UAV-borne lidar point clouds:a case study in the middle-lower Yangtze River riparian zone[J].International Journal of Remote Sensing,2016,38(8-10):2991-3002.
[12]申家双,闸旋,滕惠忠,等.海岸带地形快速移动测量技术[J].海洋测绘,2015,35(2):13-17.
[13]杨啸宇,韦程文.船载激光扫描技术在海岸侵蚀监测中的应用[J].测绘通报,2018(增1):105-107.
[14]李杰,唐秋华,丁继胜,等.船载激光扫描系统在海岛测绘中的应用[J].海洋湖沼通报,2015(3):108-112.Times New RomanOWN
[15]SHI B,LU X,YANG F,et al.Shipborne over and under-water integrated mobile mapping system and its seamless integration of point clouds[J].Marine Geodesy,2017,40(2-3):104-122.
[16]邓神宝,沈清华,王小刚.船载激光三维扫描系统构建与应用[J].人民珠江,2016,37(10):23-26.
[17]WANG H,YANG B,JIANG J P,et al.Real-time extraction of water surface boundary using shipborne radar[J].International Journal of Remote Sensing,2020,41(7):2739-2758.
[18]DIX M,ABD-ELRAHMAN A,DEWITT B,et al.Accuracy evaluation of terrestrial lidar and multibeam sonar systems mounted on a survey vessel[J].Journal of Surveying Engineering,2012,138(4):203-213.
[19]ALHO P,KUKKO A,HYYPP H,et al.Application of boat-based laser scanning for river survey[J].Earth Surface Processes & Landforms,2009,34(13):1831-1838.
[20]劉世振,邓建华,冯国正,等.机载LiDAR在山区型河道地形测绘中的适用性研究[J].人民长江,2021,52(1):108-113.
(编辑:刘 媛)
Ship-borne photogrammetry for river steep bank topographic survey by integrating digital camera and GNSS
LI Shuming1,YAN Liying2,JIANG Jianping1,YANG Biao2
(1.Lower Changjiang River Bureau of Hydrological and Water Resources Survey,Hydrology Bureau of Changjiang Water Resources Commission,Nanjing 210011,China; 2.Nanjing Juntu Technology Co.,Ltd.,Nanjing 211100,China)
Abstract: Aiming at the problems of high operation risk and high cost of UAV remote sensing and ship-borne LiDAR technology in river steep bank topographic survey,a ship-borne photogrammetry method integrating consumer digital camera and GNSS was proposed.This method can realize automatic data acquisition with lasting endurance by networking sensors and PCs.By studying the self-calibration beam method and sensor calibration model,the fusion of digital image and GNSS data was realized,solving the dependence of mobile photogrammetry on control points or high-precision inertial navigation.By studying the degree of freedom elimination method in ship-borne image data processing,the 3D scene reconstruction of river steep bank was realized.The measurement results in the typical reaches of the Yangtze River showed that this method was reliable in accuracy,efficient in data acquisition,and highly automated in data processing.It can realize the integrated mapping of land and water,and has significant advantages such as low cost and easy operation.
Key words: ship-borne photogrammetry;digital camera;GNSS;river bank topographic photogrammetry;mobile photogrammetry
收稿日期:2022-03-21
基金项目:安徽省教育厅无人机开发及数据应用重点实验室开放基金项目(WRJ19005)
作者简介:李树明,男,高级工程师,主要从事河道勘测技术研究与管理工作。E-mail:xylism@cjh.com.cn
通信作者:严丽英,女,高级工程师,硕士,主要从事河道勘测技术研发工作。E-mail:364752421@qq.com
