基于视觉传达技术的船舶实效图像自适应增强方法
2023-07-22傅建明
傅建明
(江西科技学院, 江西 南昌 330098)
0 引 言
由于船舶工作环境的特殊性,其在执行出海任务时对各类信息的监测要求更加严格,尤其是船舶的可视化信息,对于船舶安全出行来说更为重要[1-2]。但因为水流的冲击、水雾以及光照条件的影响,获取的船舶实效图像往往会出现模糊、颜色暗淡以及灰度化等分辨率低的问题[3-4]。为了获取高分辨率的可视化信息,助力船舶安全行驶,就需要对获取的船舶实效图像进行增强处理。
近年来,国内外诸多学者关于船舶图像增强问题进行了研究,并取得了一定的研究成果。如黄宁淑等[5]利用剪裁的方式对船舶图像目标区域进行提取,求得该区域内像素间的距离,建立图像物理坐标,并依据坐标信息对船舶图像实施三维重建。在此基础上,引入视觉传达技术,对局部区域的亮度进行调节,使图像的光线分布更有层次感,进而达到增强图像的目的。成藻等[6]通过视觉传达技术把船舶图像划分成三种秩序,即空间和时间、内在和外在以及抽象和具象,并以此对图像特征进行提取,同时把图像特征投射至聚类矩阵中,获取聚类图像,将高分辨率图像当作低分辨率图像的优化约束条件,确定目标函数后重新建立聚类图像,此时得到的图像即为增强后的船舶图像。上述2 种方法虽然对图像起到了一定的增强作用,但是第1 种方法对于图像光线的不均匀性可以进行较好的处理,但在图像细节方面则达不到理想的增强效果;第2 种方法则没有考虑图像增强的自适应性,缺乏处理图像的灵活性。
视觉传达技术以交互体验与感受为重点,依据视觉规律,通过相关技术将视觉信息传达出来,目前已在多个领域得到推广。本文提出一种视觉传达技术下船舶实效图像自适应增强方法,可以较好地实现船舶实效图像的自适应增强。
1 船舶实效图像自适应增强
1.1 船舶实效图像亮度分量的校正处理
1.1.1 船舶实效图像亮度分量的提取
由于采集到的原始船舶实效图像属于RGB 图像,在RGB 空间中增强图像的饱和度和亮度(灰度值)往往会使图像出现颜色失真的现象;而在HSI 空间内,是从色调(H)、饱和度(S)以及亮度(I)三个方面对图像色彩特征进行表述,并且I与H,S不存在任何关联,也就是说,在该空间内处理船舶实效图像的亮度信息,则不会对其原来图像的颜色产生影响。所以在对船舶实效图像亮度进行处理前,应先将其转换至HSV 空间中。对I的转换可以描述为:
式中:RGB 图像的红、绿、蓝分量分别用R,G,B描述。
1.1.2 基于伽马校正的图像亮度分量自适应校正
伽马校正属于非线性操作,常用于图像的预处理,该技术可以对图像的光照和对比度进行修正。而伽马参数γ则是该技术中较为重要的参变量,利用对γ的调节,可以完成对图像亮度分量的自适应校正。当γ是1 时,图像没有改变;当γ小于1 时,图像亮度会增大;当γ大于1 时,图像亮度会变小。本文依据船舶实效图像光照分量的分布特点,对γ实施自适应调节,进而完成对船舶实效图像亮度(灰度值)的自适应校正。创建的伽马校正函数描述为:
其中,γ描述为:
式中:光照分量亮度平均值用u描述;校正后亮度用Iout(x,y)描述;原图像亮度用Iin∈[0,Imax]描述;Imax是最大亮度值;空间平面坐标用x,y描述。
将转换至HIS 空间的船舶实效图像,通过上述操作,可以在颜色信息不流失的情况下,对其亮度进行调节,进而得到亮度适宜的船舶实效图像。
1.2 基于Retinex 算法的船舶实效图像增强
Retinex 算法属于视觉传达技术,该方法根据对人类视网膜和大脑皮层运行过程的模拟,完成对图像的增强,该过程可以表示为:
式中:E(x,y) 为经过亮度校正后的船舶实效图像用,L(x,y)为图像中的光照分量用,D(x,y)为反射图像用;且D(x,y)可以反映出船舶实效图像的细节信息。
Retinex 算法的核心思想是:去除L(x,y)对图像视觉效果造成的影响,保留能体现图像本质属性的D(x,y)。单尺寸的Retinex 算法通过高斯函数对光照分量L(x,y)展开分析,消除L(x,y)对船舶实效图像的影响,达到增强图像的目的,描述为:
式中:卷积运算用 *描述;高斯核函数用η(x,y)描述,且η(x,y)用公式表示为:
式中,归一化系数用ζ描述,高斯环绕尺度用σ描述,e代表指数函数。
在Retinex 算法中,σ的取值至关重要,它直接关系到船舶实效图像的增强效果。只有当σ的取值适当,才能使增强后的船舶实效图像在动态范围的压缩和对比度方面保持平衡,达到理想的图像增强效果。为了使σ的取值更合理,本文利用粒子群算法(PSO)对σ值进行自适应选取。PSO 算法依据种群的连续迭代进行全局求优,即利用所有粒子之间的协作和竞争来完成整体最佳位置的搜寻。粒子所处位置代表的就是σ的取值,算法最终寻得的整体最佳位置就是σ的最佳值。
设定存在于维度S空间中的种群,由数量是N的粒子构建,描述为其中粒子i在该空间内的位置用描述,代表问题的潜在解。该粒子的移动速度用描述,个体极值用整体种群全局极值用描述。在迭代过程中,利用pg与pi对粒子的速度与位置进行改变,该过程的更新模型可以描述为:
式中:粒子i的移动速度用描述;位置用描述;目前迭代次数用t描述;惯性权重用ω描述;学习因子用λ1,λ2描述,随机数用r1和r2描述,且二者的取值范围为[0,1]。另外,为了避免粒子出现盲目搜寻的现象,需要对其速度与位置进行设限,通常设限的范围分别为[-Vmax,Vmax]和[-Qmax,Qmax]。
在PSO 算法中,需要利用适应度值对粒子的优良进行评估,也是评价船舶实效图像质量好坏的依据。针对船舶实效图像内容模糊以及对比度低等特点,将信息熵H和标准差δ作为判断船舶实效图像质量的指标。其中,图像中包含的信息量通过H描述,对比度特征用δ描述。将二者引入PSO 算法中,对船舶实效图像增强问题的适应度函数进行构建,描述为:
式中,常数用α1和α2描述,且二者的和是1。
通过对粒子适应度的线性排列,可以对粒子进行客观评价。
传统PSO 算法中,通常会出现粒子跟随记忆搜寻,使算法过早收敛,出现局部极值的问题。为了避免出现类似的问题,可以将遗传(GA)算法中的基因变异策略引入其中,对粒子位置更新方式进行改进,描述为:
式中,随机数用r3和r4描述,目前和最大迭代次数分别用t和tmax描述,粒子变异几率用h(t)描述。
通过上述方法对PSO 算法进行改进后,可以减少记忆性对粒子运动的干扰,防止出现重复路线,有效提升收敛速度,避免发生局部最优的问题。
利用改进后的PSO 算法可以得到Retinex 算法中σ的最优值,从而提升Retinex 算法的性能,达到优化Retinex 算法的目的。最后采用优化后的Retinex 算法,去除光照分量L(x,y)对船舶实效图像质量产生的不良影响,获取能反映图像本质属性的D(x,y),进而实现船舶实效图像的自适应增强。
2 实验结果与分析
以某货轮为实验对象,该货轮长50 m,宽6 m,深3.5 m,标准吃水1.3 m,运载能力160 t,可用于远、近海的货物运输。
为了验证本文方法的有效性,实验随机选取该货轮的实效图像利用本文方法进行了图像增强操作。实验主要参数见表1,该货轮实效图像增强前后的效果,如图1 所示。由图1 可知,原船舶实效图像整体较为灰暗,分辨率较低,不利于视觉信息的传达和人眼的观察。而经过本文方法增强后的船舶实效图像,极大地提升了图像分辨率,清晰度高,无曝光点,细节丰富,达到了较好的视觉效果,为后续船舶实效图像的应用奠定了基础。
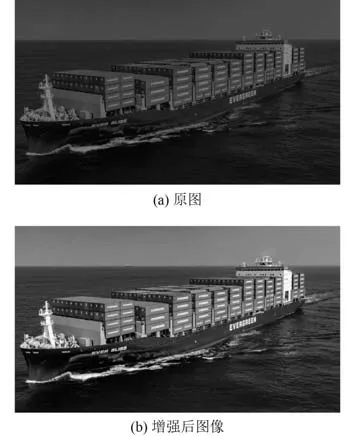
图1 船舶实效图像增强效果图Fig. 1 Enhanced effect of ship's actual image
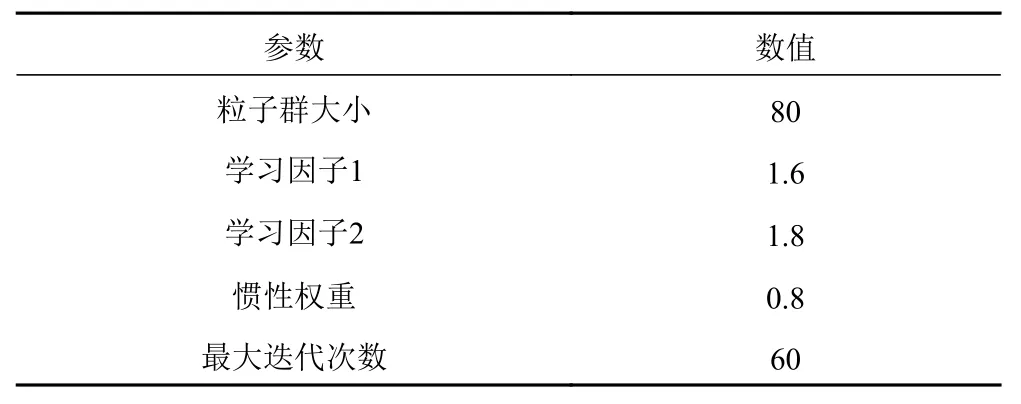
表1 实验参数设置Tab. 1 Experimental parameter settings
为了验证本文所提优化后粒子群算法的性能,实验对该算法的粒子适应度进行了测试,设定最大迭代次数为180,最佳适应度为98,得到的结果如图2 所示。由图2 可知,利用本文方法得到的粒子适应度曲线,随着实验的进行迅速向最佳值贴近。迭代次数为40 次时,适应度曲线已接近最佳适应度值;迭代次数为60 次时,适应度曲线已处于收敛状态。由此说明本文方法将GA 算法中的基因变异策略引入粒子群算法中,对其进行了较好的改进,可以快速实现算法的收敛,找到全局最优值。
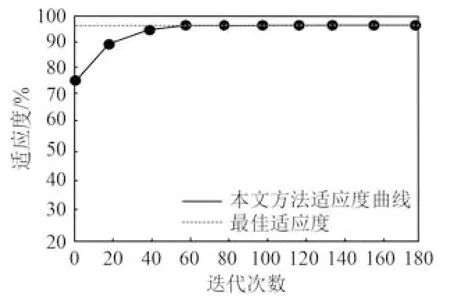
图2 适应度变化趋势Fig. 2 Fitness variation trend
NIQE 即自然图像质量评估指标,常用于对增强后图像品质的评价,其值越小,代表经过增强的图像与自然图像差异越小。为了衡量本文方法的优越性,实验在不同信噪比条件下,利用本文方法对船舶实效图像进行了自适应增强,并通过NIQE 指标对增强前后的船舶实效图像质量进行了评价,得出的结果,如图3所示。可知,经过本文方法增强后的船舶实效图像,在不同信噪比条件下的NIQE 值对比增强前的图像得到了大幅度下降,尤其是信噪比为80 时,增强后船舶实效图像的NIQE 已降低至2,即使信噪比为10 时,增强后图像的NIQE 也未超过4。由此说明,利用本文方法对船舶实效图像进行适自应增强后,图像质量有了显著提升,进而证明本文方法具有较好的性能。
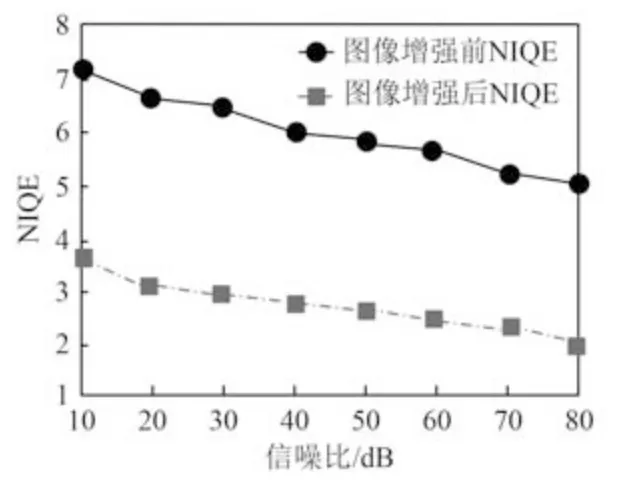
图3 不同信噪比条件下的NIQE 表现情况Fig. 3 NIQE performance under different signal-to-noise ratios
3 结 语
由于海洋环境比较复杂,同时还会有其他船舶在同海域中航行,这样便导致对船舶的监测增加了难度。为了得到高分辨率的船舶实效图像,从中获取更多的细节信息,本文提出基于视觉传达技术下船舶实效图像自适应增强方法。该方法利用改进PSO 算法对Retinex 算法中的高斯环绕尺度进行自适应取值,利用优化后的Retinex 算法对船舶实效图像实施了增强。通过实验证明,本文方法在增强船舶实效图像方面有着较好表现,具有较强的应用价值。
