船舶电力推进系统无刷直流电机控制技术
2023-07-22王红林
王红林
(1. 江苏科技大学 自动化学院, 江苏 镇江 212028;2. 镇江市高等专科学校 电气与信息学院, 江苏 镇江 212028)
0 引 言
电力推进系统具有良好的经济性、安全性以及优越的操作性能。同时,电力推进系统所需空间较小,工作噪声和污染相较于传统的推进系统均有很大的改善,是目前研究和关注的重点。而无刷直流电机(brushless direct current motor)作为一种高效率、高可靠性、低噪声的电机类型,被广泛应用于船舶电力推进系统中[1],如何实现对无刷直流电机的精确控制一直是研究的热点和难点。
本文从无刷直流电机的结构原理入手,分析其控制策略及其优缺点,通过理论分析和实验验证,提出一种新的无刷直流电机控制技术,以此为基础,实现对船舶电力推进系统的优化控制。该研究对于提升船舶的运行效率、减少污染排放、提高航行安全性具有重要的理论意义和实际应用价值。
1 工作原理分析
船的电力系统中无刷直流电机使用的非常普遍,这是由于无刷直流电机具有结构简单、使用稳定等优点。磁场是由定子产生而且这个磁场是不会变化的,为了能够驱动直流电机转动,在无刷直流电机的控制方式上需要不断改变绕组的电流方向,这样产生了2 个完全垂直的磁场,这2 个磁场能够不断地驱动电机旋转[2],如图1 所示。
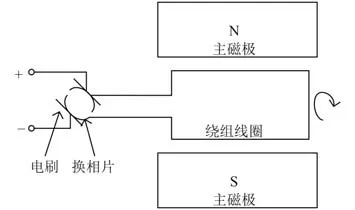
图1 普通直流电动机结构示意图Fig. 1 General DC motor schematic
无刷直流电机则是去掉了图1 中的电刷,其原理如图2 所示,电子开关线路、位置传感器以及电机本体就构成了一个最简单的无刷直流电机[3]。
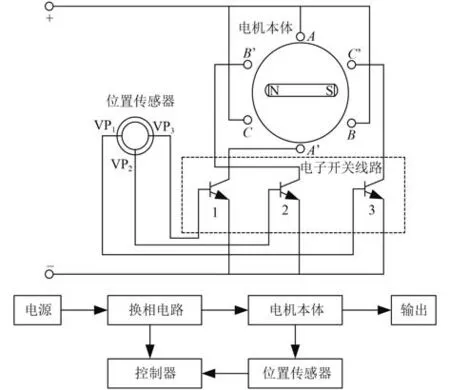
图2 无刷直流电机结构原理图Fig. 2 Brushless DC motor structure schematic diagram
电机本体包括定子和转子,定子又由定子绕组和定子芯组成,在工作过程中,定子固定不动。而转子在工作过程中是旋转的,转子通常由永磁体制成。电机能够转动的关键是电流产生的磁电动势和转子之间会产生互相作用力,转子最终会在这种作用力下不断转动。电机的结构非常简单,因而在出现故障时也非常容易维修。
位置传感器在无刷直流电机中较为常见,位置传感器能够获得定子和转子的相对位置,位置传感器也有多种类型,如电磁式和光电式等,当转子转过位置传感器时,位置传感器就可以获得当前电机的转动方向以及速度等信息,从而方便控制电路对电机进行控制[4]。
功率管、转子位置信息处理器构成了电子开关电路,电子开关电路控制了各相绕组的通电顺序和时间,位置传感器的输出信号经过电子开关电路放大后,作为触发信号来控制绕组,是无刷直流电机实现无接触换向功能的关键部分。
对无刷直流电机的电压进行计算时需要假设无刷直流电机三相绕组的基本参数完全相同,这些基本参数包括了电阻和电感,同时由于在电机中产生的磁场是方波,因而可以对无刷直流电机的三相电压进行计算,如下式:
其中:p为微分算子;ua,ub,uc为三相定子相电压;Ra,Rb,Rc为三相定子相电阻;ia,ib,ic为三相定子相电流;ea,eb,ec为三相定子反电动势;La,Lb,Lc为三相定子绕组自感;Lab,Lac,Lba,Lbc、Lca,Lcb为三相定子绕组间互感, 同时,Lab=Lba,Lac=Lca,Lbc=Lcb。
在同样的前提条件下,无刷直流电动机的转矩表达式如下:
其中:Pn为电机的极对数;ϖ为电机的角速度。如果忽略转动时的粘滞系数,可以得到无刷直流电机的运动方程(TL为电机的负载转矩,J为电机的转动惯量)。由此可以看出,电磁转矩大小与磁通和电流幅值成正比。
工作过程中,控制无刷直流电机的速度以及转矩对功能的实现非常重要,主要利用反电动势的计算方程实现上述控制功能:
其中:N为定子各相的线圈数;l为转子的长度;r为转子的内径;B为转子的磁通密度;ω为电机的角速度;i为相电流;θ为转子位置。
2 基于DSP 的无刷直流电机控制系统
DSP 是数字信号处理(digital signal processing)的简称,考虑到船舶在航行中的复杂情况,需要快速处理大量的数据,因此,本文基于DSP 构建船舶推进系统中的电机控制系统,系统使用无刷直流电机,如图3所示。
位置传感器则实时采样转子位置,将位置信息反馈回控制器,生成PWM 信号,驱动功率开关器件并提供换相信号。逆变器则将反馈的转子位置信号处理后,通过三相逆变器将直流电能逆变成交流电能,使电机能够持续运转。整个控制系统采用了电流、转速双闭环的控制策略,电流环和速度环都采用模糊PID 算法进行调节,该算法相对于PID 算法需要进行严格的比例、积分和微分系数的选取,而模糊算法则可以在线对这3 个系数进行自动调节,大大减少实验的时间和工作量。
2.1 核心本体模块
整个控制系统中,BLDCM 本体模块是设计的关键部分,同时在设计前需要对其进行仿真,以避免在最后的设计和制造过程中出现问题。仿真一般使用Matlab 中的Simulink 来实现。在使用Simulink 构建出仿真模型后,可以对仿真模型中的转速、电压、电流等进行计算。
本文选择分段线性法获取反电动势波形,这一环节对电机本体仿真模块的性能具有直接影响和决定作用。使用分段线性法的优点在于其达到的精度非常高,并且在实现方式上和其他方法相比更加简单。在对电机控制系统进行仿真时实现的难易程度和实现的精度对于仿真结果具有非常重要的影响。傅里叶变换方法应用也比较多,但是在实现方式上较为复杂,因而本文对二相导通星型的核心本体模块进行仿真使用分段线性法,最终得到了反电动势波形,如图4 所示。
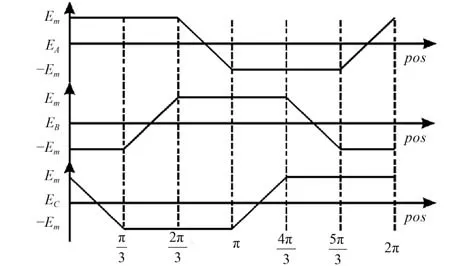
图4 反电动势波形Fig. 4 Back EMF waveform
2.2 DSP 和IPM 模块
DSP 的脉冲宽度调制电路由6 个子模块组成,每个通道均可以输出两路PWM 调制信号。在驱动器中,逆变全桥由6 个功率管组成,每个桥臂上的上桥臂和下桥臂的功率管驱动信号互补。因此,在输出脉冲信号之前,需要使用驱动电路将其放大以驱动负载。
IPM 是一种集成功率模块,可将电机驱动和主控系统集成在一起,使电机智能供电,缩短电机控制器研发周期,同时具有使用方便、成本低廉等优点。该模块将电机功率、控制和保护模块集成在一起,不仅结构简单,而且整体性能也得到了提升。
为了提升输入电压,采用三路斩波电路,其中每一路的电路均由二极管与电容组成。由于电机既是电动机又是发电机,二极管起到了防止电流反向流动的作用,而电容则用于储存电能。在PWM 信号的高频工作条件下,升压电路的目的是将放大后的输入电压传输至驱动芯片,从而使得电子开关电路在其控制下能够稳定工作。六路PWM 信号输出至功率管栅极两端,其中每相由2 个功率管控制,功率管输出信号与输入信号相反。因此,驱动功率管需要进行多级电路分析和处理,才能最终驱动这六路PWM 信号[6]。
2.3 软件控制模块
软件控制模块主要实现模糊PID 算法、PWM 控制信号输出、电流信号和反电动势信号的采样以及使用MOS 管或者IGBT 实现开关的控制。
为了满足船舶电力推进系统的要求,采用现代流行的控制算法来控制直流无刷电机。在DSP 中实现模糊PID 算法,根据设定的转速的参考值和传感器反馈的实际值以及变化速率进行实时控制。同时,控制输出的PWM 控制信号,通过采样每相定子电流信号和定子反电动势信号来控制直流无刷电机的输出转矩。
通过利用模糊推理,模糊自适应PID 控制器能够根据误差及其动态变化率实时调整PID 控制器参数,进一步提高电机控制系统的自适应能力,从而获得最佳的转速响应曲线[5]。图5 为BLDCM 模糊自适应PID控制器的结构框图。
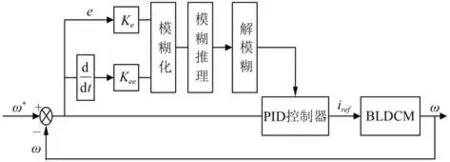
图5 PID 模糊控制器原理图Fig. 5 PID fuzzy controller schematic
2.4 实验结果
在仿真实验中,BLDCM 的参数为:额定电压24 V,额定功率60 W,额定转速3000 r/min,额定转矩0.18 Nm,额定电流3.2 A,空载电流0.1 A,空载转速4800 r/min。在额定负载转矩下,分别采用传统PID 控制及模糊自适应PID 控制策略,对BLDCM 整体仿真模型进行仿真,得到不同转速给定下的转速响应变化曲线,同时统计了不同响应时间对应的转速变化,如图6 所示。
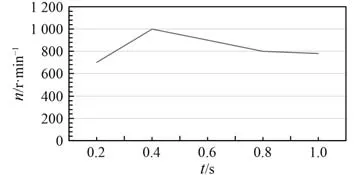
图6 转速变化曲线Fig. 6 Speed change curve
为了进一步验证无刷直流电机控制系统的性能,搭建基于模糊自适应的 BLDCM 控制系统实验平台。在实验过程中使用1 台额定转速为2 500 r/min 的电机,供电电流和电压分别为5.4A 和DC48V,转矩为4.5 N·m。实验过程中所使用电机的参数如下∶额定转速为3000 r/min,额定电压为24 V,额定电流为3.2 A,额定转矩为0.18 Nm。在实验过程中不断改变实验条件,并得到不同条件下传统PID 控制和模糊自适应PID 控制的实验结果,如图7 所示。
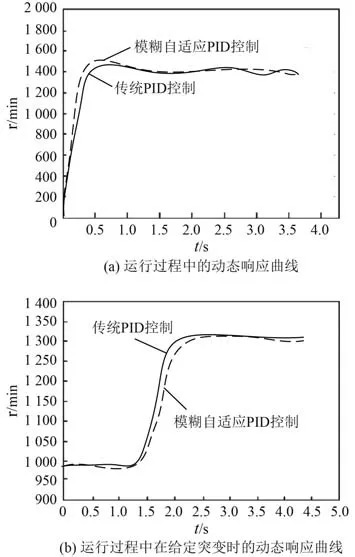
图7 实验结果Fig. 7 The results of the experiment
从图7(a)可以看出,无刷直流电机2 种算法下响应速度不同。在传统的PID 算法中,BLDCM 的响应时间相对于模糊自适应的PID 算法而言要慢,也就表明响应速度较慢。从图7(b)看出,在转速从大约1000 r/min 上升到至1300 r/min 时,模糊自适应的PID 算法控制的直流电机更平稳、更快速地提升至指定转速,可以说明在紧急情况下,模糊自适应的PID 算法控制的无刷直流电机更可靠。
由上述实验结果可知,本文基于DSP 的无刷直流电机控制系统的静态性能和动态性能都表现良好,响应时间短且稳态误差很小,可以较好地在船舶推进系统中实现应用。当在航行过程中遇到紧急情况时,采用的模糊自适应控制算法,使得电机可以更快地进行响应,提升了航行的安全性和稳定性。
3 结 语
本文采用DSP 作为核心控制芯片,对无刷直流电机的相关控制技术进行研究,通过模糊自适应PID算法对无刷直流电机进行控制。实验结果表明,该系统可以为船舶的航行提供更好的转矩和转速,电机性能稳定、可靠,为船舶航行中的安全性和稳定性提供了保障。后续可以在算法方面进行优化,进一步提高电机性能。
