大气环境监测卫星姿轨控分系统设计与在轨验证
2023-07-17翟兴辉张凯诚刘登岭朱文山张艳召李利亮
孙 尚,翟兴辉,张凯诚,刘登岭,朱文山,张艳召,李利亮
(1.上海航天控制技术研究所,上海 201109;2.上海市空间智能控制技术重点实验室,上海 201109;3.上海航天技术研究院,上海 201109)
0 引言
大气环境监测卫星是我国首颗大气环境综合探测卫星,采用升交点地方时为13:30 的太阳同步回归轨道,携带了大气探测激光雷达、高精度偏振扫描仪、多角度偏振成像仪、紫外高光谱大气成分探测仪及宽幅成像光谱仪等5 台有效载荷,可以实现对大气环境、水环境和生态环境的综合监测。
卫星姿轨控分系统(Attitude and Orbit Control System,AOCS)在任务期间为卫星提供满足载荷需求的对地观测姿态,并将轨道维持在标称轨道附近,同时保持太阳帆板对日定向跟踪。载荷在姿态测量精度、姿态确定精度、姿态控制精度、寿命等方面对AOCS 提出了较高的要求,特别是星上搭载的大气探测激光雷达要求AOCS 实现高精度姿态测量[1]。
大气环境监测卫星继承了上海航天技术研究院SAST 3000 平台及现有设计[2-6],为满足任务要求,AOCS 针对卫星和载荷特点,通过多头星敏感器数据融合、一体化安装与精密温控技术,设计了高精度姿态测量方案;采用载荷姿态导引与干扰力矩补偿设计,实现卫星在轨高精度、高稳定度运行。
本文介绍了大气环境监测卫星AOCS 的体系结构、高精度姿态测量设计和稳态飞轮控制方案等内容,重点论述了姿态补偿方法和在轨验证情况。本文第1 章介绍了大气环境监测卫星AOCS 的基本情况,包括分系统的主要功能、性能指标、硬件组成及控制模式等;第2 章详细介绍了卫星AOCS 设计的亮点,包括高精度姿态测量设计和针对卫星与载荷特点的姿态控制方案优化;第3 章结合卫星在轨数据,分析了AOCS 的姿态测量与姿态控制精度,评估了优化设计的效果。
1 AOCS 简介
1.1 分系统的主要功能与性能指标
大气环境监测卫星AOCS 的主要功能包括:消除卫星星箭分离和电池阵展开带来的扰动,建立稳定的三轴对地姿态;根据载荷的标定需求,进行导引姿态的跟踪;自主检测各单机故障并在故障后重构系统等。
AOCS 主要性能指标为:三轴惯性测量精度优于0.002°(3σ),三轴指向精度优于0.05°(3σ),三轴稳定度优于0.001(°)/s(3σ)。
1.2 分系统的硬件组成
根据卫星功能和性能指标要求,AOCS 由星敏感器、陀螺组合、三轴磁强计、太阳敏感器等姿态敏感器、控制器和反作用飞轮、磁力矩器、推力器(隶属于推进分系统)和帆板驱动控制器(隶属于太阳电池阵分系统)等执行机构组成,如图1 所示。
图中,星敏感器1 为高精度多头星敏感器,具有3 个独立的测量头部,可以融合输出姿态;5 个飞轮采用“三正装+两斜装”的构型,飞轮X、Y、Z分别沿本体三轴安装,飞轮S1、S2 沿不同方向相对本体轴倾斜安装,5 个飞轮中的任意3 个均可提供三轴控制力矩。
1.3 分系统控制模式设计
为满足任务需求,AOCS 共设计了11 个工作模式[7]:消初偏模式、等待模式、姿态消偏模式、喷气控制对地定向模式、飞轮控制对地定向模式、轨道控制模式、飞轮控制安全模式、喷气控制安全模式、磁轮联控模式、星地大回路模式和测试模式。各模式间设计了跳转条件,可自主或根据地面指令进行模式切换。
卫星采用三轴对地定向的整星零动量稳定方式,飞轮控制对地定向模式是卫星在轨的长期运行模式[8-9]。在该模式下,根据载荷需要进行姿态导引,需执行轨控任务时进入轨道控制模式,当卫星姿态失稳或出现能源危机时进入安全模式完成整星对日定向[10]。长期运行稳定运行时,卫星的姿态基准选用星敏感器与陀螺联合滤波[11-12]确定的姿态角,轨道基准选用全球导航卫星系统(GNSS)的定轨数据[13],姿态导引采用偏流角导引[14],使用磁力矩器卸载飞轮角动量[15],选用太阳星历数据驱动太阳电池阵对日跟踪。
2 技术设计特点
2.1 高精度姿态测量设计
为保证大气探测激光雷达的探测精度,AOCS姿态测量需满足0.002°(3σ)的指标。为满足姿态测量指标要求,AOCS 采取了以下措施:
1)星敏感器多个头部数据融合[16-17]。采用星敏感器3 个头部的融合姿态作为星敏感器的输出姿态,并在头部布局设计时使3 个头部光轴两两间的夹角尽可能大,保证姿态融合的效果。
2)星敏感器3 个头部采用一体化支架安装[18]。为减小星敏感器安装位置和在轨热变形的影响,设计了3 个头部一体化的安装支架,支架采用热膨胀系数较优的铝基碳化硅材料。
3)对星敏感器支架采取精密温控[19-20]。为星敏感器支架配备了精密温控仪,将星敏感器安装面温度波动控制在±0.3 ℃,保证星敏感器安装面波动量不超过2.5″。
2.2 飞轮控制方案设计
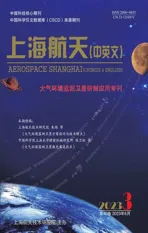
AOCS 的飞轮控制框,如图2 所示。图中:KP、KI、KI2为控制参数;I为星体惯量;φ、θ、ψ分别为三轴姿态确定角;φd、θd、ψd分别为三轴目标姿态角。大气环境监测卫星在传统飞轮PI 控制律[21-23]的基础上,在卫星姿态稳定后又加入了对姿态角误差的二次积分项,即图中虚线框中的部分。二次积分项的加入,进一步提高了稳态下的姿态控制精度。
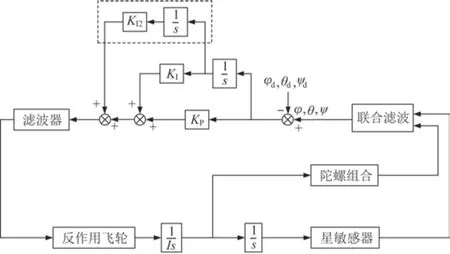
图2 AOCS 飞轮控制框Fig.2 Simplified flywheel control chart of the AOCS
大气环境监测卫星的零动量飞轮控制系统设计的特点还体现在以下几个方面:
1)通过频率隔离降低太阳电池阵挠性影响。大气环境监测卫星单翼太阳电池阵基频低至0.12 Hz 且耦合系数较大,其挠性的影响不可忽略。为降低太阳电池阵挠性振动及其对控制的影响[24-25],将控制系统的截止频率设计为0.08 rad/s,比太阳电池阵基频低一个数量级,实现了挠性振动频率与控制频率的隔离。
2)选择合适的飞轮组合并设计偏置角动量以避免飞轮转速过零。反作用飞轮转速频繁过零会影响系统稳定度和飞轮寿命[26],理论分析表明,选择飞轮X、Z和一个斜装飞轮接入闭环,并根据卫星受到的干扰情况设置一定的俯仰偏置角动量,可以实现稳态下接入闭环的3 个飞轮转速均不过零。
3)根据载荷成像和标定需求设计了多种姿态导引方式,不同导引方式下的三轴目标姿态角不同。除了常规的无导引和偏流角导引外,大气环境监测卫星还根据大气探测激光雷达的标定需求设计了2 种导引方式:①滚动姿态偏置导引,滚动姿态小角度偏置,即φd=φ0≠0,θd=ψd=0,有助于大气探测激光雷达对地面靶标的标定;② 偏航圆锥摆动导引,滚动、俯仰姿态分别随时间t按余弦、正弦跟踪,即φd=A1cosω1t,θd=A1sinω1t,ψd=0,其中,A1、ω1分别为导引姿态的幅值和频率,有助于大气探测激光雷达对激光指向的标定。
4)设计前馈补偿力矩以抵消载荷启动和停止时的干扰。大气环境监测卫星上搭载的多个有效载荷都在进入光照区后开启、离开光照区前关闭,其上旋转部件的启动和停止将带来干扰。为此设计了前馈补偿力矩如图3 所示,以卫星进入光照区的时刻作为计时起点,其中的补偿时刻t1与t2、补偿持续时间Δt1与Δt2、补偿力矩T1与T2均可地面注数配置。
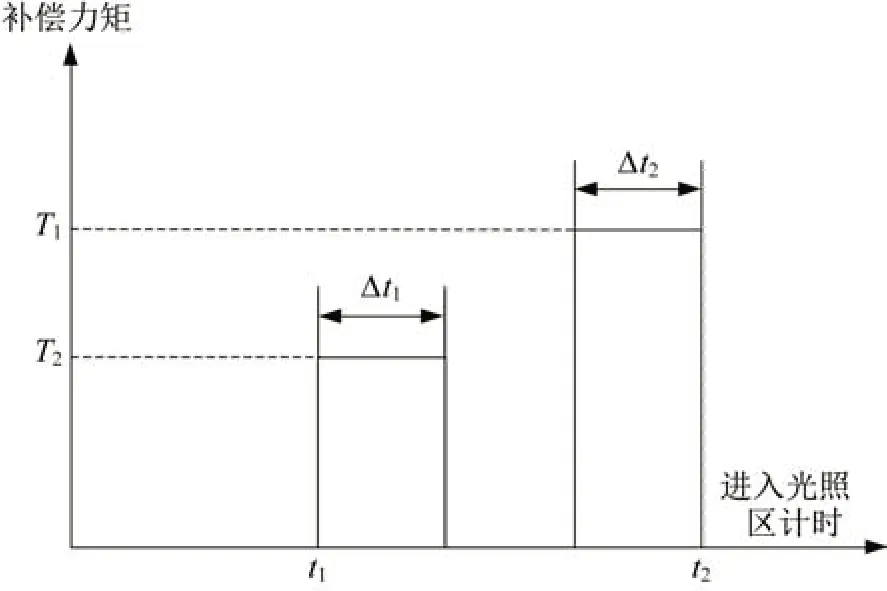
图3 载荷补偿力矩Fig.3 Schematic diagram of the payload compensation torque
3 在轨性能
大气环境监测卫星于2022 年4 月16 日发射,入轨后AOCS 工作正常,按照飞行程序消除姿态偏差,建立了飞轮控制对地定向的长期工作模式,经过4 次轨道控制进入了标称轨道,启用偏流角导引并设置太阳电池阵偏置30°。在轨偏流角导引下星敏感器1 的测量误差[27]和卫星的姿态确定角分别图4 和图5 所示。经统计,星敏感器1 各测量轴的测量误差(3σ)分别为2.62″、1.98″和2.31″,满足姿态测量优于0.002°(7.2″)的指标要求。
图4 星敏感器1 的在轨测量误差Fig.4 On-orbit measurement error of star sensor 1
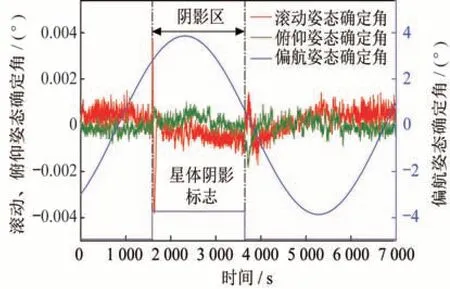
图5 卫星在轨姿态确定角Fig.5 On-orbit attitude determination angles of the satellite
飞轮控制对地定向模式跟踪偏流角时,卫星姿态角控制误差和角速度控制误差如图6 所示。数据统计显示,卫星姿态指向精度优于0.002°(3σ)以内,姿态稳定度优于0.000 6(°)/s(3σ)以内,优于0.05°(3σ)、0.001(°)/s(3σ)的设计指标。此外还可以看出,卫星本体的滚动、偏航方向受到太阳电池阵挠性影响较大,尤其是本体惯量较小的滚动方向;同时,卫星进出阴影前后太阳电池阵的热颤[28]给滚动和偏航方向的姿态角带来了较明显的波动。
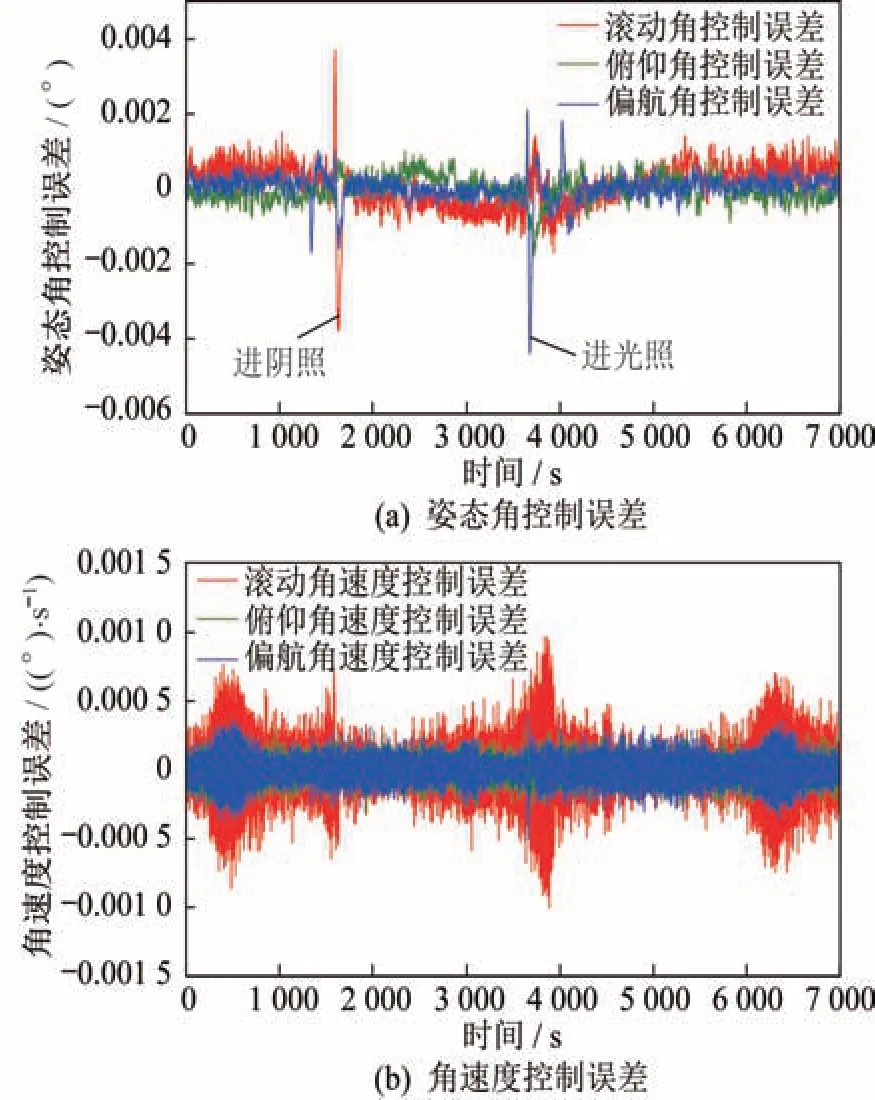
图6 在轨姿态角与角速度控制误差Fig.6 Control errors of the on-orbit attitude angle and angular velocity
卫星稳态飞轮控制对地定向时的飞轮返回转速变化如图7 所示,飞轮X、Z、S1 接入闭环并设置了-2.5 N·ms 的俯仰偏置角动量,实现了接入闭环的3 个飞轮转速均不过0。
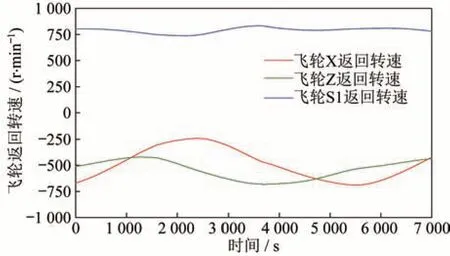
图7 在轨飞轮返回转速Fig.7 On-orbit feedback speed of the flywheels
载荷开始工作后,AOCS 根据载荷旋转部件的启动与停止规律,上注了载荷补偿力矩参数并启用了载荷补偿力矩。以滚动轴为例,启用载荷补偿力矩前后的姿态对比如图8 所示,可以看出载荷补偿力矩抵消了大部分载荷旋转部件干扰,使卫星在轨运行期间的姿态精度更高、更加平稳。
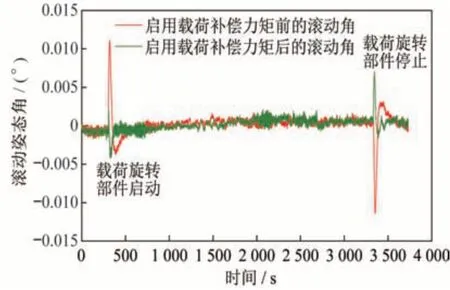
图8 启用载荷补偿力矩前后的滚动角Fig.8 Roll angle before and after applying the payload compensation torque
4 结束语
大气环境监测卫星AOCS 在继承SAST 3000平台控制系统的基础上,根据卫星的任务特点,开展了分系统设计与研制工作,重点开展了高精度姿态测量设计和飞轮控制方案设计。在轨实测指标表明,卫星的姿态测量精度、指向精度和姿态稳定度均满足指标要求。