低耦合度2PaUU–PPaP并联机构的运动学分析与多目标优化
2023-07-15张发海李丽红朱磊
张发海,李丽红,朱磊
低耦合度2PaUU–PPaP并联机构的运动学分析与多目标优化
张发海1,李丽红1,朱磊2
(1.江苏安全技术职业学院 机械工程系,江苏 徐州 221000; 2.中国矿业大学 材料与物理学院,江苏 徐州 221116)
针对三平移并联机构结构复杂、耦合度高而引起的运动学分析、动力学分析、误差分析等十分烦琐的问题,提出一种低耦合度三平移空间并联机构。分析得到机构的自由度、耦合度、方位特征集等拓扑参数,建立运动学位置方程推导正、逆解的解析式并对其进行算例验证。根据计算雅可比矩阵推导出位置正解奇异、位置逆解奇异存在条件。进一步研究机构的操作空间,并得到操作空间三维形状图。此外,建立以运动灵巧度与操作空间体积为目标的数学模型,给定目标函数表达式,选择NSGA–Ⅱ算法完成具有Pareto解的多目标参数优化。分析表明,搜索得到工作空间外部边界光滑,呈半球形状结构,内部不连续分布的特点。在较为均衡平缓的区域选择参数的设计,能够同时兼顾体积和全局灵巧度的较佳值,以期为该类型机构在分拣、包装等应用领域提供参考。
耦合度;并联机构奇异性;工作空间;灵巧度;多目标优化
空间三平移并联机器人机构可以作为分拣装置应用到自动化的分拣、上下料、分装、包装生产线上,具有广泛的应用前景[1-2]。机构一般由3条支链以及动、静平台构成[3]。由于运动输入、输出关系非线性、强耦合等诸多问题使得运动学分析、动力学建模、控制误差分析十分复杂[4]。
近年来研究三平移机器人机构设计学者有很多,其中围绕着空间三平移并联机器人机构设计研究不少,并取得了丰硕的成果。沈惠平等[5]设计一种三平移并联机构。根据方位特征集理论分别计算方位特征集、耦合度、自由度等特性,分析验证机构可行性,利用矢量法建立机构的运动学模型,分析发生奇异位形的条件、机构位置工作空间。席万强等[6]提出一种少自由度并联完全解耦机器人的构型综合方法,阐述C集运算法则以及综合的步骤。同时综合得到三平移(3T)解耦并联机器人。孔一啸等[7]设计一种2–CPR/UPS并联机构的三平移机器人应用于移运机,根据修正的Kutzbach–Grubler公式计算机构的自由度。分析得到执行末端的操作工作空间形状和大小,以及评级机构运动性能的全域性能指标。分析计算表明该机构在工作空间中无奇异位置且灵巧度性能良好。陈修龙等[8]提出一种冗余驱动的三平移并联机器人机构。根据李群理论计算输出,由自由度建立运动学方程模型,计算得到位置正解和逆解符号解析式。推导出奇异存在的约束条件,计算得到位置工作空间形状和大小。推导得到机构操作空间内部出现不连续的条件,最后研究结构参数与性能指标间的映射关系。上述研究设计的机构的耦合度复杂,不易控制、运动学分析烦琐,均不利于三平移并联机器人机构在工业领域的应用。

1 并联机构拓扑分析
1.1 结构设计
如图1所示为2PaUU–PPaP并联机器人机构构型图,静平台由正方形构成,第1、2条支链的构型为PaUU,第3条支链构型为PPaP。动平台即机构执行末端由圆形构成。静平台之间由3条支链来连接,动平台平行四边形机构刚性地固定在静平台平面上。第1、2条支链对称分布。Pa表示平行四边形机构,它是由4个轴线平行的转动副构成,U表示万向铰,P表示移动副。设定机构机构参数描述如表1所示。三维图如图2所示。
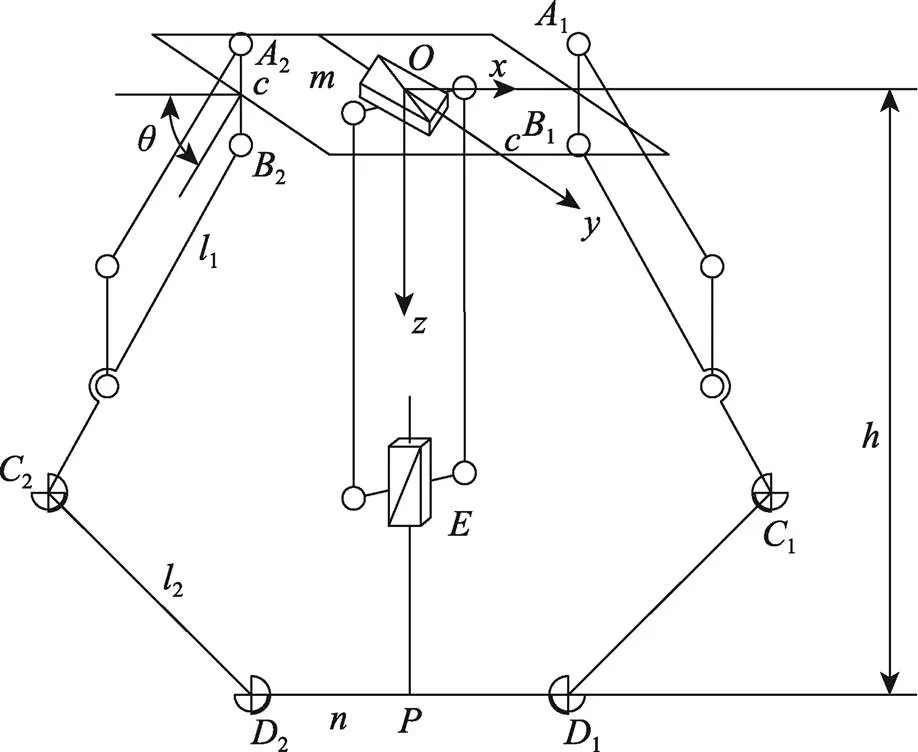
图1 2PaUU–PPaP并联机器人机构构型
表1 参数描述
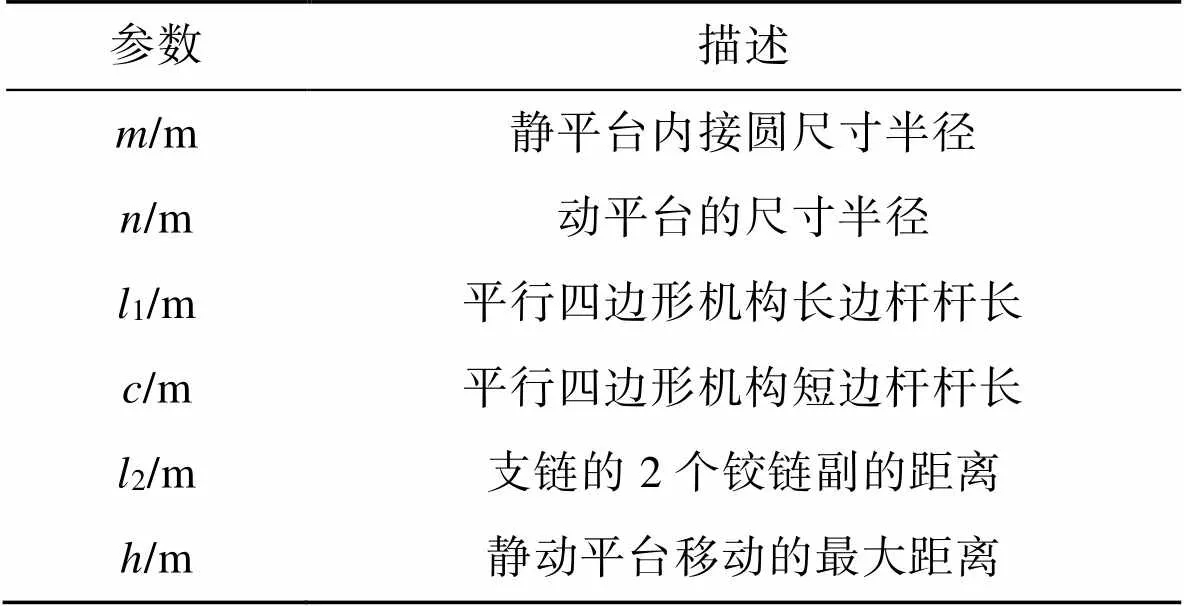
Tab.1 Parameter description

图2 2PaUU–PPaP并联机构的三维图
1.2 机构的拓扑特性分析
根据方位特征集的自由度计算公式以及耦合度计算式[10]见式(1)—(2)。




式中:为移动副特征;转动副特征。
同时,支链3是3个不同方向的移动副,因此,支链3的方位特征集见式(4)。


另外,由这2条支链构成的并联机械手的执行末端POC集:

同时,根据自由度计算公式得到自由度为:



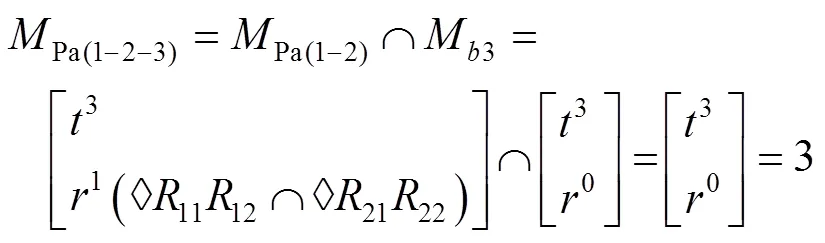
分析得到机构的自由度1–2–3:


该并联机构耦合度的分析结果见式(12)。


2 运动学分析
2.1 运动学逆解分析

将C、D点坐标代入等式(13)中,可得到数学模型见式(14)。



2.2 运动学正解分析
已知与底座连接主动副执行输入(1,2,),输出运动位置(,,)。根据式(14)整理得到式(16)。

其中,1=1sin1–,2=1sin1–,1=–+–1cos1,1=––1cos2。
通过计算得到位置正解:

3 正逆解算例分析
为了验证位置正反解等式计算的准确性,选择一些数值解来校验计算结果的正确性。将数据代入表达式中进行互验,选取结构参数如下:=1 m、=0.5 m、1=0.6 m、2=1.2 m、=0.1 m。通过运动学位置分析得到的逆、正解表达式,算例计算逆解、正解数值解如表2、表3所示。
根据表2、表3所示的逆解、正解的数值解对比分析可知,位置逆、正解计算结果吻合,验证了并联机构位置解析正确合理。
表2 逆解算例

Tab.2 Solutions of inverse displacement
表3 正解算例

Tab.3 Solutions of forward displacement
4 奇异分析
4.1 机构雅克比矩阵
根据等式(15)对时间求导,得到机构正逆解雅克比矩阵。


若X非奇异,则:


4.2 逆解奇异性分析
机构逆解奇异条件为:

或


4.3 正解奇异性分析
正解奇异存在条件为:


根据式(26)推导得到式(27)和式(28)。



图3 2PaUU–PPaP并联机器人机构逆解奇异

图4 2PaUU–PPaP并联机器人机构正解奇异
5 机构的性能指标分析
5.1 工作空间分析
机构工作空间的是各支链的运动空间范围的交集,直接导致工作空间较小。需要选择合适的参数进行算例分析,选择结构参数如下:=1 m、=0.7 m、1=0.65 m、2=1.5 m、=0.1 m。根据极限搜索法绘制工作空间三维图,如图5所示。

图5 机构工作空间三维图
分析表明:搜索得到的工作空间边界光滑且呈对称分布状态,内部存在空洞情况。形状为半球结构。
5.2 运动灵巧度分析
运动灵巧度是评价机构运动性能优劣的指标,通常以运动灵巧度指标作为运动性能的评价指标,表达式见式(28)。

根据以上定义和5.1节参数,搜索得到运动灵巧度指标在工作空间的分布图,如图6所示。可以看出空间呈现半球形,最大运动灵巧度关于轴左右分布。从机构的工作空间范围内运动灵巧度来看,整体操作空间大、运动灵巧度高、内部无空洞。能满足高速轻载自动化搬运分拣作业需求,可作为一种包装自动化产线分拣装置。
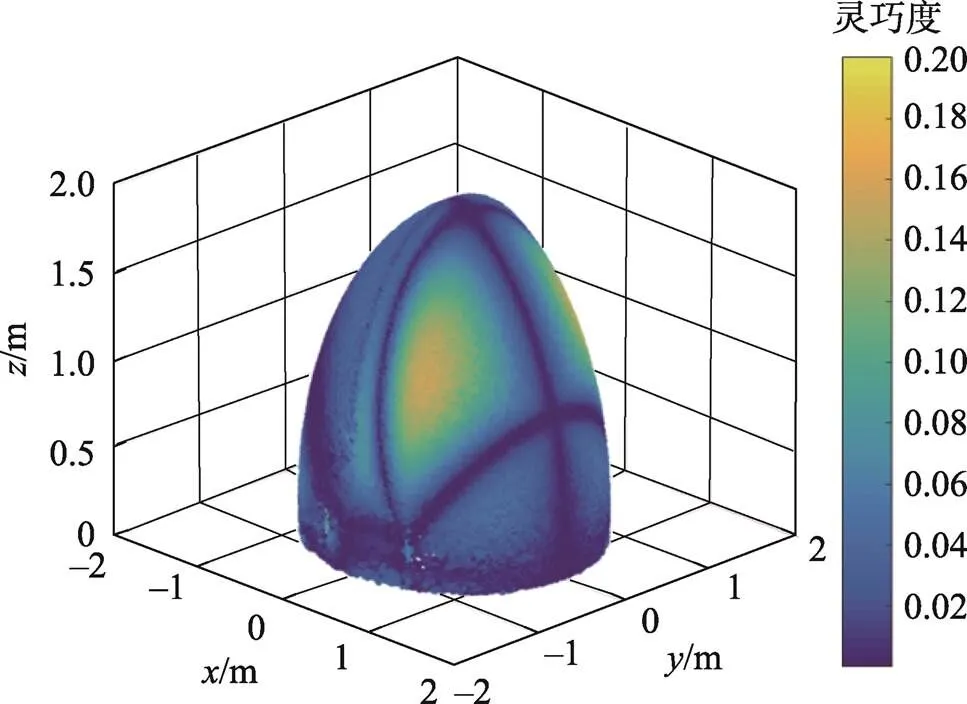
图6 可达工作空间的运动灵巧度分布
6 并联机构尺度综合优化
6.1 模型优化的建立

6.2 优化算法的选择
算法采用NSGA–Ⅱ算法进行多目标优化,参考文献[13]中的参数:∈[0.5,1.5]、∈[0.2,1]、1∈[0.5,1.5]、2∈[0.5,1.5]、∈[0.1,0.5]。算法目标:多目标中,输出的是迭代后整个种群Pareto最优解,构成一个Pareto实际前沿面。
6.3 优化结果
根据以上算法[14-15],选择个体数为200,迭代次数为200,交叉和变异的分布指数都为20,得到的Pareto前沿集如图7所示,选择部分Pareto解如表4所示。
优化后的Pareto优化形状为抛物线类似的前沿集合,若体积在12 m3左右,则全局灵巧度为0.118左右;若体积在5 m3左右,则全局灵巧度为0.142左右。曲线表明了可达工作空间和全局灵巧度的背离趋势,全局灵巧度在0.115~0.130时,体积为11~13 m3,变化平缓;全局灵巧度大于0.13后,体积降低较快。因此可以在较为均衡平缓的区域选择参数的设计,能够同时兼顾体积和全局灵巧度的较佳值,这为机构的参数设计提供了指导。

图7 Pareto优化前沿集
表4 部分Pareto最优解的参数与目标函数

Tab.4 Parameters and objective functions of partial optimal Pareto solution
进一步对第1—4组的参数在工作空间进行灵巧度的精细分布(图8)。可以发现在所有的参数下,工作空间的形状类似半个轮胎,这表明前沿集合是一类具有类似拓扑结构的解的集合,不同的地方在于内部的灵巧度分布不一致。较低的灵巧度空间都在外部壳层区域,并且在面有一个明显的十字形状的低灵巧度带。

图8 表4中第1组到第4组参数下的灵巧度在空间的分布
图9和图10是第1组和第4组的内部灵巧度分布,2组的区域都在>0的截面。较大的灵巧度区域关于=0面左右对称集中;而>0的截面是不对称的结构。第1组基本没有较高的灵巧度在剖面分布,而第4组有较高的灵巧度在剖面分布。进一步将灵巧度区域分成[0,0.1]、[0.1,0.3]、[0.3,1],并且进行了空间占比的计算,如表5所示。

图9 第1组Parto最优解下的内部灵巧度分布

图10 第4组Pareto最优解下的内部灵巧度分布
表5 第1和第4组参数的灵巧度区域的体积占比
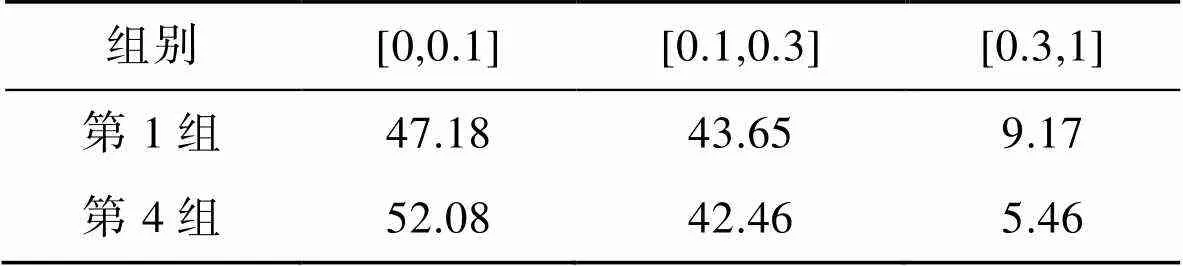
Tab.5 Volume proportion of dexterity region of group 1 and group 4 parameters %
在第1组和第4组参数下的灵巧度区域分布上形状接近,大于0.3的空间区域沿着对称,形状类似于对称的肺泡,此时的体积占比较小,为9.17%和5.46%;灵巧度为[0.1,0.3]的结构比较复杂,有8个独立区域,沿着=0对称分布,体积占比较大,为43.65%和42.46%;灵巧度小于0.1的为剩余外壳结构,体积占比最大,为47.18%和52.08%。因此可以根据不同的灵巧度区域和实际的机构运动设计结合,得到想要的运动区域空间。
7 结语
1)对2PaUU–PPaP并联机器进行了拓扑学分析,以及正逆解的求解分析,正解和逆解相互印证。
2)对机构工作空间进行了分析,工作空间内部不连续,呈对称的半球形状分布、边界轮廓光滑。
3)采用NSGA–Ⅱ算法进行了对空间体积和全局灵巧度的多目标优化,得到了Pareto优化前沿解,确定了变化平缓的全局灵巧度区域为0.12~0.13,此时具有较大的体积(10~13 m3)。可以根据实际工况的需求进行参数选择。
4)研究了部分参数下的灵巧度精细结构,可达工作空间的形状基本一致,都为半轮胎;并且在灵巧度区域形状也相似,但各个区域分布的体积基本接近,灵巧度大于0.3的部分都集中在类似肺泡的空间中。
[1] MA Zhi-yuan, ZHU Wei, Li Han-bing, et al. Multi-Objective Optimization Design for a Kind of Three-Translation Parallel Robot Mechanism[J]. Journal of Mechanical Transmission, 43(2): 56-60.
[2] BRINKER J, CORVES B, TAKEDA Y. On the Motion/Force Transmissibility and Constrainability of Delta Parallel Robots[J] Materials Science and Engineering, 2018, 49(35): 18-22.
[3] XU Xiao-peng, DENG Min, LEE Y W, et al. Realizing High-Efficiency Multiple Blend Polymer Solar Cellsa Unique Parallel-Series Working Mechanism[J]. Journal of Materials Chemistry A, 2019, 7(43): 24937-24946.
[4] 余亮, 张龙, 王鹏, 等. 一种三平动并联机构的设计与运动学分析[J]. 机械传动, 2020, 44(2): 61-67.
YU Liang, ZHANG Long, WANG Peng, et al. Design and Kinematics Analysis of a 3-DOF Translational Parallel Mechanism[J]. Journal of Mechanical Transmission, 2020, 44(2): 61-67.
[5] 沈惠平, 曾博雄, 尤晶晶, 等. 具有解析式位置正解的三平移并联机构设计与分析[J]. 农业机械学报, 2020, 51(2): 383-391, 426.
SHEN Hui-ping, ZENG Bo-xiong, YOU Jing-jing, et al. Topology Design and Analysis of Three-Translation Parallel Mechanism with Analytical Direct Position Solutions[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(2): 383-391.
[6] 席万强, 俞斌, 宋长坡, 等. 基于C集的少自由度并联解耦机器人构型综合[J]. 机床与液压, 2021, 49(17): 25-30.
XI Wan-qiang, YU Bin, SONG Chang-po, et al. Type Synthesis of Decoupled less DOF Parallel Mechanism Based on C Set[J]. Machine Tool & Hydraulics, 2021, 49(17): 25-30.
[7] 孔一啸, 田宝俊, 李瑞琴. 基于2-CPR/UPS三平移并联机构的移印机运动学分析[J]. 包装工程, 2021, 42(3): 207-213.
KONG Yi-xiao, TIAN Bao-jun, LI Rui-qin. Kinematics Analysis of Pad Printing Machine Based on 2-CPR/UPS Three-Translation Parallel Mechanism[J]. Packaging Engineering, 2021, 42(3): 207-213.
[8] 陈修龙, 蒋德玉, 陈林林, 等. 冗余并联机构运动学性能分析与优化[J]. 农业机械学报, 2016, 47(6): 340-347.
CHEN Xiu-long, JIANG De-yu, CHEN Lin-lin, et al, et al. Kinematics Performance Analysis and Optimal Design of Redundant Actuation Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6): 340-347.
[9] 李家宇, 沈惠平, 孟庆梅, 等. 一种Delta变形机构及其基于工作空间分析的尺度设计[J]. 机械设计, 2018, 35(7): 92-98.
LI Jia-yu, SHEN Hui-ping, MENG Qing-mei, et al. A Delta-Derived Mechanism and Its Scale Design Based on Working Space Analysis[J]. Journal of Machine Design, 2018, 35(7): 92-98.
[10] 杨廷力, 刘安心, 罗玉峰. 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012.
YANG Ting-li, LIU An-xin, LUO Yu-feng. Theory and Application of Robot Mechanism Topology[M]. Beijing: Science Press, 2012.
[11] 刘建国, 马春生, 文杰, 等. 基于2CRU/2PRRR并联式灌装机构的设计与工作空间分析[J]. 包装工程, 2022, 43(7): 184-189.
LIU Jian-guo, MA Chun-sheng, WEN Jie, et al. Design and Workspace Analysis of Parallel Canning Mechanism Based on 2CRU/2PRRR[J]. Packaging Engineering, 2022, 43(7): 184-189.
[12] 张英, 孙豪, 马帅帅. 基于4–UPS/CPC并联机构的多维调姿隔振平台设计[J]. 中国机械工程, 2021, 32(13): 1513-1522.
ZHANG Ying, SUN Hao, MA Shuai-shuai. Design of a Kind of Multi-Dimensional Attitude Adjustment and Vibration Isolation Platform Based on 4-UPS/CPC Parallel Mechanisms[J]. China Mechanical Engineering, 2021, 32(13): 1513-1522.
[13] 朱伟, 戴志明, 刘晓飞, 等. 一种新型弱耦合三平移并联机器人机构及其运动学分析[J]. 中国机械工程, 2017, 28(13): 1561-1566.
ZHU Wei, DAI Zhi-ming, LIU Xiao-fei, et al. A Novel Weak-Coupling Three-Translation Parallel Robot Mechanisms and Its Kinematics Analysis[J]. China Mechanical Engineering, 2017, 28(13): 1561-1566.
[14] KHALKHALI A, MOSTAFAPOUR M, TABATABAIE S M, et al. Multi-Objective Crashworthiness Optimization of Perforated Square Tubes Using Modified NSGAII and MOPSO[J]. Structural & Multidisciplinary Optimization, 2016, 54(1):1-17.
[15] ESFE M H, HAJMOHAMMAD M H, WONGWISES S, et al. Pareto Optimal Design of Thermal Conductivity and Viscosity of ND-Co3O4 Nanofluids by MOPSO and NSGA Ⅱ Using Response Surface Methodology[J]. Current Nanoscience, 2018, 13: 34-45.
Kinematic Analysis and Multi-objective Scale Synthesis of Low Coupling 2PaUU-PPaP Parallel Mechanism
ZHANG Fa-hai1, LI Li-hong1,ZHU Lei1
(1. Department of Mechanical Engineering, Jiangsu College of Safety Technology, Jiangsu Xuzhou 221000, China; 2. College of materials and Physics, China University of Mining and Technology, Jiangsu Xuzhou 221116, China)
The work aims to propose a low coupling degree three translation spatial parallel mechanism to solve the complicated kinematics analysis, dynamics analysis and error analysis caused by the complex structure and high coupling degree of the three translation parallel mechanism. Topological parameters such as DOF, coupling degree and azimuth feature set of the mechanism were analyzed. The analytic expressions of forward and inverse solutions of the kinematic position equations were established and verified by an example. At the same time, according to the calculation of Jacobian matrix, the existence conditions of the singularity of positive position solution and the singularity of inverse position solution were derived. Furthermore, the operating space of the mechanism was studied and a three-dimensional shape map of the operating space was obtained. In addition, the mathematical model with the goal of motion dexterity and operation space volume was established. The objective function expression was given. The NSGA-Ⅱ algorithm was selected to complete multi-objective parameter optimization with Pareto solutions. The analysis showed that the outer boundary of the workspace was smooth and there was a cavity inside, which was a hemispherical structure. The optimal value of both volume and global dexterity can be taken into account when selecting parameters in a relatively balanced and gentle area, so as to provide reference for this type of mechanism in sorting, packaging and other application fields.
coupling degree;parallel mechanism; singularity; workspace; dexterity; multi-objective optimization
TH122
A
1001-3563(2023)13-0217-10
10.19554/j.cnki.1001-3563.2023.13.026
2022−09−04
江苏省博士后科研资助计划项目(2019K205);中央高校基本科研业务费项目(2019XKQYMS16)
张发海(1986—),男,讲师,主要研究方向为机械电子工程、机器人技术。
责任编辑:曾钰婵
