基于T/S-SAS的多无人机四维协同攻击航线生成
2023-07-10张堃刘泽坤华帅张振冲李珂于竞婷
张堃,刘泽坤,华帅,张振冲,李珂,于竞婷
(1.西北工业大学 电子信息学院,陕西 西安 710072;2.光电控制技术重点实验室,河南 洛阳 471000;3.中航(成都)无人机系统股份有限公司,四川 成都 611743)
0 引言
在军事智能化[1]大背景下,无人机技术得到了蓬勃发展,但随着作战环境日益复杂,作战任务日渐多样,单架无人机难以独自完成作战任务,多无人机协同作战研究愈发重要。其中,攻击航线生成作为多无人机协同作战的关键环节,是保障无人机生存概率,增强多无人机协同作战能力的重要前提。
在实际作战环境中,战场态势环境错综复杂、参与作战的多无人机起点不尽相同,但是对目标的打击常常存在时间需求,导致参战的不同无人机攻击航线交错纵横,容易发生碰撞,且航程参差不齐,难以在相近时间抵达任务点,进而实施协同攻击。因此,开展多无人机时间/空间双协同下的攻击航线生成研究十分必要。
目前,航线生成算法多集中于数学规划法、路标图法、势场法、随机规划法、启发式搜索法等。近年来也涌现出许多强化学习方法如Q-Learning[2],但是强化学习在前期学习阶段具有较高计算成本。数学规划法包括动态规划法[3]、混合整数线性规划(MILP)法[4]、模型预测控制(MPC) 法[5]/滚动时域控制(RHC) 法[6]、基于Markov决策过程的方法[7]等。数学规划法易于理解,但在复杂空间环境下求解难度及计算量较大,难以保证算法的实时性。基于路标图法主要包括可视图法[8]、Voronoi图法[9]等。这些算法通常依据环境及障碍物对规划空间进行划分,规划结果较为安全,但规划速度与规划空间复杂度关系密切,航路规划结果并不占优,特别是针对无人机飞行性能约束需要进一步改进。势场法通过不同力场间合成力的作用引导无人机到达目标集合点,典型算法包括人工势场(APF)法[10]及其改进方法[11],如APF与虚拟结构结合的控制方法[12]、流函数(SF)法[13]、扰动流体动态系统(IFDS)法[14]等。这类算法计算量较小、实用性高,但对于复杂规划环境仍需考虑规避局部最小的问题,且算法对参数的依赖性较大。随机规划法通过随机采样构建路径集合,并在其中寻找可飞行路径,主要方法包括随机路标图(PRM)法[15]和快速扩展随机树(RRT)法[16]等。不同改进提高了对时间和空间上的利用率,加快了算法收敛速度,但其规划结果较难应用于多无人机协同航路规划过程。基于启发式搜索的路径规划算法以A*、D*算法为代表,将求解的目标信息引入启发式信息,使搜索过程具有导向性,极大地提高了搜索效率。特别是A*算法,作为应用最广泛的航路规划算法,许多研究人员在不同方向上提出了改进[17-20],但对多无人机协同,特别是时间/空间双协同规划问题还需进一步考虑和平衡。
为满足多无人机抵达各自目标点的时间协同以及空间防碰撞飞行协同要求,本文提出基于时间与空间双协同稀疏A*搜索(T/S-SAS)算法的多无人机四维协同(时间+三维空间协同)攻击航线生成算法,通过改进飞行扩展节点模型,建立多机防碰撞约束模型,建立时间协同代价计算模型,设计基于并发扩展的算法结构,生成满足空间安全约束以及协同时间到达约束的多无人机攻击航线,以提高多无人机协同作战能力。
1 多无人机作战环境模型
1.1 作战环境描述
设多无人机协同作战空间范围为l×w×h,目标T空间坐标位置为
Pe=(x,y,z)T
(1)
参与作战的无人机数量为NU,定义无人机集合U为
U={U1,U2,…,Ui,…,UNU}
(2)

1.2 作战地形模型
采用广泛应用的数学方程建立数字地形,以圆锥体模拟山峰并加入微小波动作为原始基准地形。模拟山峰如式(3)所示:
(3)
式中:h1(x,y)为采用式(3)计算的点的山峰高度,(x,y)为任意一点的水平投影面二维坐标;Np为山峰个数;Hj为山峰的最高高度;(Aj,Bj)为山峰二维中心点坐标;Kj为山峰的山坡陡度。
原始基准地形的数学模型如式(4)所示:

(4)
式中:h2(x,y)为采用式(4)计算的(x,y)点的山峰高度;a、b、c、d、e、f、为7个不同的系数。
根据式(3)、式(4)的描述,建立模拟地形如式(5)所示:
h(x,y)=max(h1(x,y),h2(x,y))
(5)
式中:h(x,y)为地形高度。
在给出任意一点的水平坐标(x,y)条件下,可计算得到该点在地形中对应的高度h(x,y)。
1.3 环境威胁模型
环境威胁模型包括不利气候威胁区模型、雷达威胁区模型、防空导弹威胁区模型,在多无人机协同攻击航线生成时需要进行规避。
1.3.1 不利气候威胁区模型
不利气候威胁区可近似建模为圆柱体区域,威胁区高度远高于无人机飞行高度,在无人机不同飞行高度的水平截面为圆形区域,如图1所示。图1中,dC表示当前无人机水平投影点与不利气候威胁区水平投影中心点的欧式距离,OC为威胁区中心水平投影面二维坐标,dC,min分别为不利气候威胁区不可穿越区半径,dC,max为不利气候威胁区最大影响半径,PC,min为不利气候威胁区对无人机最小威胁代价值,PC,max为不利气候威胁区对无人机最大威胁代价值。

图1 不利气候威胁区Fig.1 Adverse climate threat zone
不同距离下不利气候威胁代价值如式(6)所示:

(6)
式中:PC表示不利气候威胁区对无人机威胁代价值。
1.3.2 雷达威胁区模型
雷达是一种利用无线电磁波进行探测目标的设备,可以根据发射和回收的电磁波完成对目标的识别和测距甚至是追踪,其威胁模型如图2所示。图2中,Δh表示当前无人机与雷达中心坐标的高度差值,θR为雷达威胁的扫描范围角,dR,min为雷达威胁的不可逃逸距离,dR,max为雷达威胁的最大半径距离。

图2 雷达威胁区Fig.2 Radar threat zone
不同位置下雷达威胁代价值如式(7)所示:

(7)
式中:dR表示无人机当前位置与雷达威胁区中心位置的三维欧氏距离。


图3 防空导弹威胁区Fig.3 Air defense missile threat zone
不同位置下防空导弹威胁代价值如式(8)所示:

(8)
式(8)中两个条件分别为:
(9)
dM≤dM,min
(10)
2 多无人机协同攻击航线生成
A*算法是一种典型的启发式算法,通过在搜索过程中引入启发式信息,规划单个节点的扩展最优解,直到搜索到目标点位置[21-22]。三维双协同稀疏A*搜索(SAS)算法[23-24]通过对规划空间进行稀疏化拆分,并通过无人机飞行约束条件筛选可规划方向,其节点扩展方式如图4和图5所示。图4中,Δψmax为无人机水平方向单次扩展最大角度差,Pr为无人机当前位置点,Ps,k为无人机下一时刻水平方向可扩展的第k个航路点。图5中,γmax_c为无人机在垂直方向最大抬起角度差、γmax_d为无人机在垂直方向最大俯冲角度差。

图4 SAS算法水平面内节点扩展方式Fig.4 Horizontal plane node expansion mode of SAS algorithm

图5 SAS算法竖直面内节点扩展方式Fig.5 Vertical plane node expansion mode of SAS algorithm
2.1 基于T/S-SAS算法的多无人机四维协同攻击航线生成算法
2.1.1 飞行扩展节点改进模型
由于在SAS节点扩展方式中,节点受扩展参数设置影响,特别是在竖直面、水平面扩展节点数较少时,存在规划结果对任务点指向性不足的问题,使攻击航线折线较多,进而导致无人机总航程偏大。为增加算法规划结果的规划效率(见式(16)定义),减少部分无人机不必要机动航线,对飞行扩展节点进行如下改进:增加节点额外可扩展方向选择,提高无人机节点扩展性能,在基于飞行约束传统SAS算法的原有节点扩展基础上,额外添加当前节点Pr指向任务点Pe方向的待选节点、无人机起始位置Ps到任务点Pe方向的待选节点、与上一航迹段Pr-1Pr同速度方向的待选节点,如图6所示。
到了宋代,出现了文人画的概念,其中的代表人物是苏轼,他的“论画以形似,见与儿童邻。赋诗必此诗,定知非诗人。”一语对后来的文人画影响最大。文人画又称士大夫画,指的是画中带有文人情趣,画外流露文人思想的绘画。文人画的作者本身都具有一定的文化素养,他们通过绘画表达自己的内心情感,以画传情。传统的中国文人浸淫在儒释道三家的文化氛围中,自然而然的萌发了离尘避世的内心情节。他们通过绘画,特别是山水画,抒发的情感自然也是寻幽隐逸的精神诉求。

图6 飞行扩展节点改进模型Fig.6 Improved model of flight node expansion
2.1.2 基于并发扩展的算法结构设计
为增强不同无人机攻击航线规划过程中的关联性,设计并发扩展的算法结构。基于并发扩展的协同规划过程如图7所示。

图7 并发扩展算法规划过程Fig.7 Planning process of concurrent expansion algorithm
图7中,Ui、Uj、Uk分别为3架并发扩展的无人机,不同颜色的实心填充点为无人机已规划航路节点,虚线未填充点为无人机规划过程中舍弃的规划节点,实线未填充点为无人机当前可扩展节点选择。
在每一轮次规划过程中,同时对多架无人机进行规划,对已规划节点数未满足协同规划节点数量要求的无人机进行当前点航路扩展,否则增加协同规划节点数,进行下一阶段协同扩展过程。如图7所示,当前所有无人机已规划节点数为3(包含起点),协同规划节点数为4,随机选择无人机Ui进行航路节点扩展,即图中Ui的实线未填充点,在Ui扩展结束后,对未满足协同规划节点数的Uj、Uk中随机选择无人机继续扩展,在所有无人机已规划节点数与协同规划节点数一致后,重复上述过程直至所有无人机扩展至任务点,完成并发扩展规划过程。
并发扩展规划过程是本文所提多无人机协同攻击航线规划的基础,在并发扩展规划过程中加入时间协同代价计算模型、多机防碰撞约束模型,以实现多无人机时间、空间协同攻击航线生成。
2.1.3 时间协同代价计算模型
由于传统扩展方式中,无人机难以实现同时到达目标点执行作战任务的战术目标,为平衡多无人机不同攻击航线长度,减少无人机到达目标时间差,在基于并发扩展规划算法基础上加入以下模型:
1) 在航线扩展过程中加入时间协同代价计算模型,增加节点协同代价值,驱动无人机朝向低时间协同代价节点扩展,缩小不同无人机总飞行航程差距,如式(11)所示:
(11)

Le_tot_l,i=‖Pe-Ps,k,i‖
(12)
式中:‖·‖为欧氏距离。
2)为进一步实现多无人机时间协同攻击航线规划,在规划结束后,以无人机相关速度参数为基础,结合不同无人机攻击航线总航程计算建议平均飞行速率vr,i,进行时间协同二次处理,如式(13)所示:
(13)
式中:vmax为无人机最高飞行速率;Ltot_l,i为Ui规划结果总长度。
若vr,i满足式(14),则建议飞行速率有效:
vmin≤vr,i≤vmax
(14)
式中:vmin为无人机最低飞行速率。
通过平衡不同无人机的航程差距以及规划结束后的推荐飞行速率求解,实现多无人机攻击航线规划时间协同求解。
2.1.4 多机防碰撞约束模型
为避免多无人机攻击航线的交叉碰撞问题,在基于并发扩展规划算法基础上加入多机防碰撞约束模型。
设无人机之间最小间隔距离为ΔLmin_s,在Ui扩展节点Ps,k,i时,遍历其他无人机Uj(j≠i,0≤j≤NU)已规划航路点Pm,j(m=1,2,3,4),如图8所示。

图8 防碰撞约束实现Fig.8 Realization of anti-collision constraints
‖Ps,k,i-Pm,j‖>ΔLmin_s
(15)
若不满足式(15),则表示当前待选节点Ps,k,i与其他无人机已规划航路点不满足最小距离约束,则剔除当前待选节点Ps,k,i,重新选择待选节点并重复上述过程。另外通过无人机最小离地高度约束,实现与地面的防碰撞。
2.2 基于T/S-SAS算法的多无人机四维协同攻击航线生成算法流程
结合2.1节中的改进模型,提出基于T/S-SAS算法的多无人机四维协同攻击航线生成算法,算法流程如图9所示。

图9 基于T/S-SAS算法的多无人机四维协同攻击航线生成算法流程Fig.9 Algorithm flow of the generation of multi-UAV four-dimensional cooperative attack route based on T/S-SAS algorithm
算法具体流程如下:
1) 确定参与作战的无人机架数、初始位置、任务点位置等,对无人机编号,将其初始位置作为初始节点;
2) 对比无人机已规划航路,排除已到达目标任务点的无人机,将其中最大航路段数作为协同航迹段数;
3) 判断所有无人机已规划航路段数目是否相等。若相等,则跳转到步骤5;
4) 将已规划航迹段落数目最少的无人机作为当前扩展无人机,若多架无人机已规划航路段数相同,则选取序号最小的无人机,跳到步骤6;
5) 将最小编号无人机作为当前扩展无人机;
6) 根据改进算法生成当前扩展无人机节点待选择项;
7) 根据各种约束条件剔除不满足约束条件的节点待选择项;
8) 单机SAS算法待选项加入OPEN表过程;
9) 排除到达目标任务点的无人机,判断各无人机的协同航迹段数是否等于协同航迹段数,若不相等,则跳转到步骤2;
10) 协同航路段数加1;
11) 判断各无人机是否达到目标任务点,若没有全部到达,则跳转到步骤2;
12) 所有无人机航路已规划到任务目标点,输出推荐速度以及航路规划结果,规划过程结束。
3 仿真验证及分析
3.1 初始参数设置
实验仿真平台:CPU为i7-8750H,内存为8 GB。采用第1节中的地形以及威胁建模方式,假定在100 km×100 km×30 km的三维空间范围内执行任务,环境中存在山峰、雷达、防空导弹、不可飞行区 4种威胁,规划各项参数设置为:规划步长2 km,假设共有4架无人机,无人机参考最高飞行速度为360 km/h,最低飞行速度为180 km/h。
仿真环境中设置威胁数量及参数信息如表1所示。

表1 环境威胁参数Table 1 Environment threat parameters
本节中相关算法名称及算法改进描述如表2所示,后文中不再重复描述。

表2 相关算法名称及算法改进描述Table 2 Related algorithm name and algorithm improvement description
3.2 规划仿真验证及分析
为充分验证本文算法改进模型的有效性,针对本文所提改进模型分别进行仿真验证,区别仿真初始条件进行以下实验。
3.2.1 算法规划效率有效性验证
设置无人机起点、目标点参数如表3所示。

表3 算法规划效率测试的起点、目标点参数Table 3 Starting point and target point parameters of algorithm planning efficiency test
保持相同规划环境与参数设置,分别采用传统SAS算法与I-SAS算法对无人机进行攻击航线规划。
由于I-SAS算法中加入了额外扩展节点,理论上必然导致计算时间的增加与攻击航线的缩短,为研究二者关系,验证本文所提飞行扩展节点改进模型对I-SAS算法规划结果性能的提升作用,定义算法规划效率为
(16)
式中:TF,SAS、TF,I-SAS分别为无人机采用传统SAS算法、I-SAS算法规划结果并以最大飞行速度飞抵目标点所需飞行时间(s);Tp,SAS、Tp,I-SAS分别为传统SAS算法、I-SAS算法规划所用时长(s)。
设置单个节点在竖直面扩展节点数量M=4,在水平面扩展节点数量S=4,规划结果如图10所示。

图10 传统SAS算法与I-SAS算法规划结果对比Fig.10 Planning result comparison of traditional SAS algorithm and I-SAS algorithm
图10中,不同半球、圆柱分别为不同环境威胁,黄→褐→白渐变位置为仿真地形高度起伏,不同颜色虚线为不同无人机规划攻击航线。
如图10所示,特别是白色椭圆圈出位置中,相比传统SAS算法,I-SAS算法规划结果中,除对障碍物的必要规避机动外,攻击航线对目标指向性更明确,航路更为顺滑。
保持相同规划环境与参数设置,以不同竖直面、水平面扩展节点数量,开展多次实验,统计规划结果数据如图11所示。

图11 不同扩展节点数量下传统SAS算法与I-SAS算法规划结果数据对比Fig.11 Data comparison between traditional SAS algorithm and I-SAS algorithm under different number of expanded nodes
如图11所示,随着扩展节点数量增加,可选择扩展方向增多,算法整体计算量提高,因此两种算法都大体呈现平均规划航路长度逐渐减少的趋势。但相比传统SAS算法,I-SAS算法规划结果中平均规划航路长度降低了2.8%,算法规划效率EP最大值为17 478,平均值为6 377。这表明,针对不同扩展节点数量,(以仿真设置最大飞行速度360 km/h为例)当I-SAS算法增加0.1 s计算时间,可最低减少多架无人机总航程约174.78 km,平均减少63.8 km,大大提升了规划质量。特别是在竖直面、水平面扩展节点数较少时,I-SAS算法规划结果有较大的改善。
3.2.2 多无人机协同规划-时间协同有效性验证
为使无人机航路直线距离存在基准偏差,赋予协同时间规划意义,设置无人机起点、可设定目标点参数如表4所示。在单次仿真中分别设置不同目标点进行对比实验。

表4 时间协同测试的起点、目标点参数Table 4 Starting point and target point parameters of time coordination test
保持相同规划环境与参数设置,分别采用I-SAS算法与IT-SAS算法对无人机进行攻击航线规划。
由于IT-SAS算法相对于I-SAS算法添加了并发扩展结构及时间协同模型,理论上计算量、规划时间进一步增加;不同无人机抵达目标点所需时间最大值与最小值之差,即协同时间极差则会减小,为研究二者关系,验证本文所提IT-SAS算法规划结果对多无人机协同时间打击性能的提升作用,定义算法协同时间效率ET:
(17)
式中:ΔTF,I-SAS,d、ΔTF,IT-SAS,d分别为无人机采取I-SAS、IT-SAS算法规划结果并以最大飞行速度飞抵目标点得到的协同时间极差(s),其计算分别如式(18)、式(19)所示:
ΔTF,I-SAS,d=TF,I-SAS,max-TF,I-SAS,min
(18)
ΔTF,IT-SAS,d=TF,IT-SAS,max-TF,IT-SAS,min
(19)
保持不同算法单个节点在竖直面扩展节点数量M=4,在水平面扩展节点数量S=4。设置无人机规划目标点均为目标2,规划结果如图12所示。

图12 I-SAS算法与IT-SAS算法规划结果对比Fig.12 Planning result comparison of I-SAS algorithm and IT-SAS algorithm
图12中相关标号含义与图10相同。图12中无人机1~无人机4与所对应规划目标编号为1-2、2-2、3-2、4-2。
如图12所示:I-SAS算法与IT-SAS算法规划结果左侧椭圆中,由于都加入了飞行扩展节点改进模型,其对目标的指向性较为明确,规划结果相似;I-SAS算法与IT-SAS算法规划结果右侧椭圆中,本文IT-SAS算法能够增加部分无人机规划航程(特别是无人机3),以此平衡不同无人机之间的航迹差距,从而更容易实现多无人机协同时间攻击。
保持相同规划环境,为无人机设定不同目标点开展多次实验,统计规划结果数据如图13所示。

图13 不同目标位置设定下I-SAS算法与IT-SAS规划结果数据对比Fig.13 Data comparison between I-SAS algorithm and IT-SAS algorithm under different target location settings
如图13所示:多无人机起点与终点直线距离大相径庭,在环境威胁的影响下,导致飞行距离更是具有较大差异;在此情况下,本文所提IT-SAS算法相对于I-SAS算法,其规划结果中不同无人机飞行时间极差更短,在实验中平均减少约35.5%,即不同无人机规划航路更接近,算法协同时间效率最大值为2 061.3,平均值为871.3。以仿真设置最大飞行速度360 km/h为例,IT-SAS算法增加0.1 s计算时间能够最高缩短不同无人机协同时间极差206.1 s,平均缩短不同无人机协同时间极差87.1 s,更容易通过调节飞行速度实现时间协同,使规划结果可应用于时间协同约束下的多无人机协同攻击。
3.2.3 多无人机协同规划-空间协同有效性验证
为增加无人机航路可能产生的冲突概率,设置无人机起点接近、目标点相同,如表5所示。

表5 空间协同测试的起点、目标点参数Table 5 Starting point and target point parameters of space coordination test
保持相同规划环境与参数设置,分别采用I-SAS算法与IS-SAS算法对无人机进行攻击航线规划。为验证本文所提IS-SAS算法规划结果对无人机飞行路线空间协同性能的提升作用,定义算法协同空间有效率ES如式(20)所示:
(20)

保持不同算法单个节点在竖直面扩展节点数量M=4,在水平面扩展节点数量S=4。设置无人机设置最小安全距离为500 m,规划结果如图14所示。
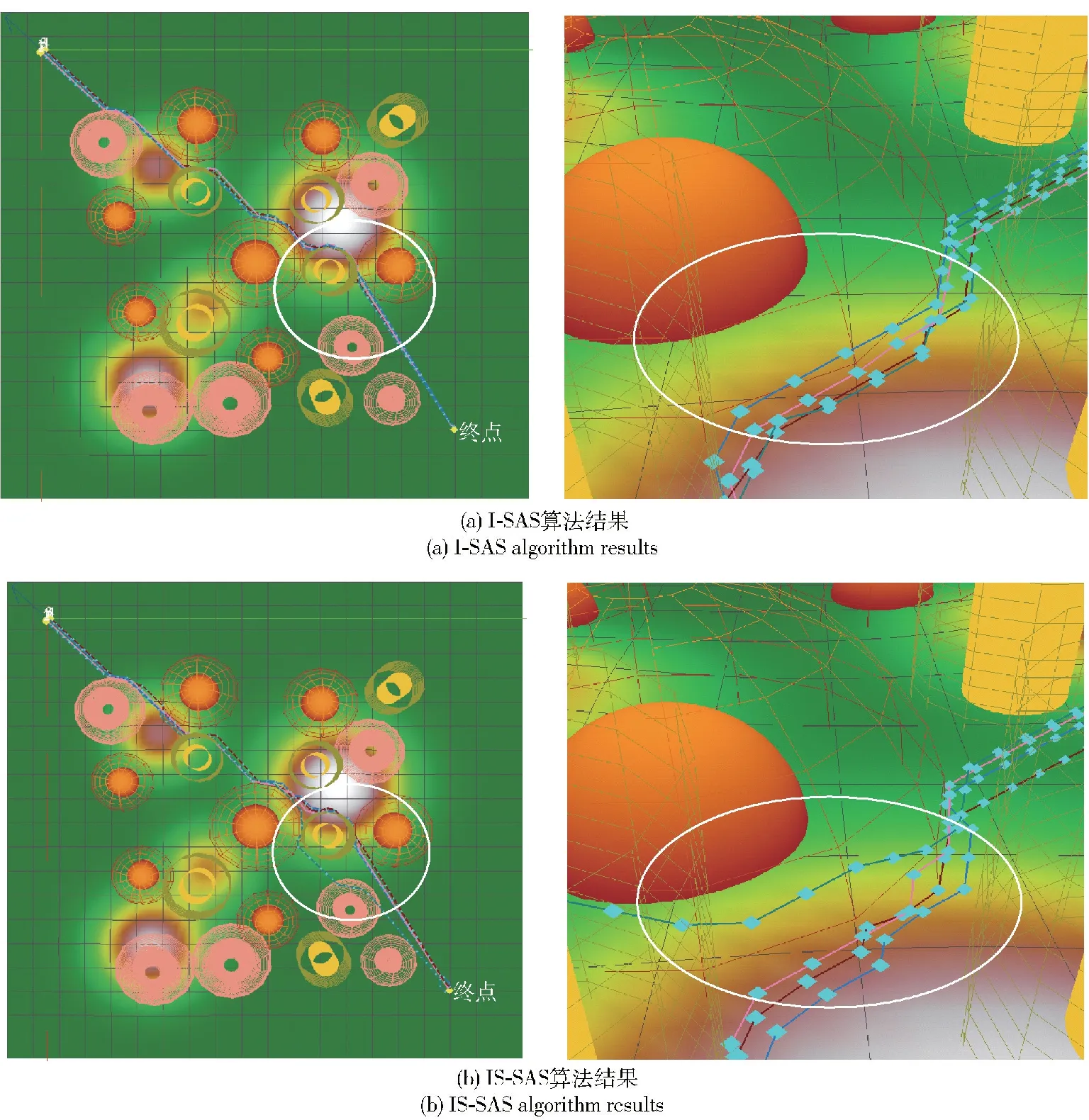
图14 I-SAS算法与IS-SAS算法规划结果对比Fig.14 Planning result comparison of I-SAS algorithm and IS-SAS algorithm
由图14可知,IS-SAS算法规划结果相对于 I-SAS算法,不同无人机攻击航线更加稀疏,不同无人机规划航线间隔直观可视变大,使多无人机协同攻击航线满足空间协同防碰撞飞行需求。
保持相同规划环境,为无人机设定不同空间协同距离(防碰撞最小安全距离)开展多次实验,统计规划结果数据如图15所示。

图15 不同安全距离下I-SAS算法与IS-SAS算法规划结果数据对比Fig.15 Data comparison between I-SAS algorithm and IS-SAS algorithm under different safety distances
由图15可知,在不同安全距离下,本文所提IS-SAS算法相对于I-SAS算法,整个航路不存在碰撞点(起点除外),即无人机规划结果中各节点与其他无人机规划节点距离均不会小于安全距离约束,其协同空间有效率ES稳定在99%以上。部分安全距离约束下的I-SAS算法规划结果中存在无人机碰撞点,导致航路不可飞行,规划结果无效。因此,本文所提IS-SAS算法可解决多无人机空间协同攻击航线生成问题。
3.2.4 多无人机协同四维攻击航线生成有效性验证
设置无人机起点接近、目标点相同,如表6所示。

表6 时间/空间协同测试的起点、目标点参数Table 6 Starting point and target point parameters of time/space coordination test
保持相同规划环境与参数设置,分别采用传统SAS算法、I-SAS算法、IT-SAS算法、IS-SAS算法与T/S-SAS算法对无人机进行攻击航线规划。其中,单个节点在竖直面扩展节点数量M=4,在水平面扩展节点数量为S=4。设置无人机最小安全距离为500 m,统计规划结果数据如图16所示。

图16 不同算法规划结果数据对比Fig.16 Planning result comparison of different algorithms
由图16可知,在相同条件下采用不同的算法进行规划,随着改进模型调整和完善,其计算复杂度逐渐提高,在规划结果上均有所改善:
在规划距离方面:相对于传统SAS算法规划结果的平均航路长度,其他算法均不同程度减少了平均航路长度,算法规划效率Ep最低值为118.23,最大值为2 587.93,航路缩短在1.65%~2.64%之间,即飞行扩展节点改进模型对于不同算法规划效率均有提高作用。在时间协同方面:相对于传统SAS算法、I-SAS算法和IS-SAS算法,IT-SAS算法和T/S-SAS算法协同均能够有效降低时间极差;与I-SAS算法相比,IT-SAS算法和T/S-SAS算法协同时间效率ET分别为80.9和17.81,降低协同时间极差分别为37.74%和26.46%,可更容易通过调节飞行速度实现多无人机时间协同。在空间协同方面:相对于传统SAS算法、I-SAS算法和IT-SAS算法,IS-SAS算法和T/S-SAS算法解决了不同无人机空间碰撞问题;与I-SAS算法相比,IS-SAS算法和T/S-SAS算法协同空间有效率Es均为100%,可实现多无人机空间协同。
上述仿真结果表明,本文所提T/S-SAS算法相对于传统SAS算法,缩短了无人机平均航路、降低了不同无人机协同时间极差,解决了不同无人机的空间防碰撞问题。在解决时间及空间协同方面具有较好的平衡性和适用性。
4 结论
本文针对多无人机攻击目标时间协同以及飞行航线空间协同问题,提出了基于T/S-SAS算法的多无人机四维协同攻击航线生成算法,改进了飞行扩展节点模型,设计了基于并发扩展的算法结构,建立了时间协同代价计算模型与多机防碰撞约束模型,提出了多无人机协同攻击航线生成算法。得出以下主要结论:
本文所提算法能够增强无人机攻击航线的规划效率,减少不同无人机抵达目标的协同攻击时间极差,解决不同无人机之间的空间防碰撞问题,使多无人机攻击航线可满足时间/空间约束,提升了多无人机协同时间打击性能及飞行路线空间协同性能,提高了无人机协同作战效率与作战能力。
