一种双轴旋转惯性导航系统的重要参数快速自标定方法
2023-07-08尹俊杰李志强宋天骁
尹俊杰,李志强,陈 雨,王 盛,宋天骁
(北京航天发射技术研究所,北京 100076)
0 引言
惯性器件误差标定技术是惯导系统的关键技术之一,通过事先对系统误差参数进行标定,在实际导航过程中对误差进行补偿,从而消除系统误差参数对导航精度的影响[1-3]。双轴旋转惯导系统在出厂前会进行全参数(陀螺和加速度计的零偏、标度因数、安装偏差角、加速度计二次项系数、杆臂误差等)的标定[4-5],再将其用于系统上完成导航。当双轴旋转惯导随系统交付后,系统惯性器件误差会随着服役时间的加长而增大,为了消除这种长期稳定性误差,用户一般会提出定期标定的保障需求[6]。
文献[6]提出了一种双轴旋转惯导系统误差自标定技术,结合设计的自标定路径和卡尔曼滤波算法,在1 h内实现了绝大部分惯性器件误差的分离和标定。文献[7]采用多位置标定方法可以在1.5 h内完成激光陀螺捷联惯导系统的全参数自标定。目前国内研究机构的研究方向主要关注全参数系统级标定,标定时间一般在1 h 以上,而针对惯性器件重要参数快速自标定方法还鲜有研究。
陀螺和加速度计的零偏、标度因数等重要参数随着时间推移变化较快,其他参数在惯导系统不拆卸的前提下变化比较缓慢甚至基本保持不变。为了进一步提高标定的快速性,本文提出了一种惯性器件的标度因数和零偏等重要参数的快速自标定方法。
该方法通过设计不同的状态变量,通过观测不同的系统导航误差,利用卡尔曼滤波算法依次估计出相应的惯性器件重要参数。仿真分析和实物试验结果表明,本文提出的快速自标定方法在10 min内可以实现重要参数的自标定,且具有易于实现、精度高的优点,是一种可以工程应用的重要参数快速自标定方法。
1 基于双轴惯导的快速自标定原理
坐标系选取如下:选取东-北-天坐标系作为导航坐标系(n系);选取惯组右-前-上坐标系作为载体坐标系(b系);记地心惯性坐标系为i系;记地球坐标系为e系。
1.1 标定误差模型
快速自标定在惯组已经完成出厂标定的基础上进行。通过将激光惯组转至特定位置后解析待标定参数误差方程实现。陀螺和加速度计的快速标定误差模型可写成[8-11]
(1)
(2)
式中

1.2 快速自标定原理
分3步顺序实现快速自标定:第一步,对当前姿态与对准完成时刻姿态的姿态误差进行观测并设计卡尔曼滤波器实现陀螺零偏进行估计;第二步,按设定的标定路径通过对速度误差进行观测并设计卡尔曼滤波器实现加速度计的零偏及其标定因数误差的标定;最后采用数值计算的方式通过双轴惯导系统的两个旋转轴对陀螺的标度因数误差进行计算。
1.2.1 陀螺零偏标定原理

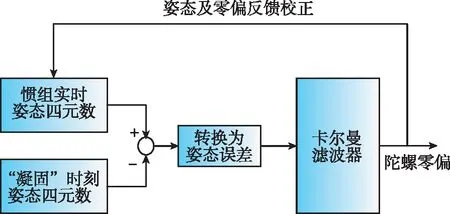
图1 陀螺零偏估计原理Fig.1 Principle of gyro bias estimation
状态方程和观测方程如式(3)所示[12]
(3)
式中

(4)
观测量Zg取为
(5)
式中,姿态角误差φ的获取方法如下。
(6)
式中,“⊗”表示四元数乘法;(qnb0)*为qnb0的共轭四元数。
姿态角误差φ为
(7)
1.2.2 加速度计标定原理
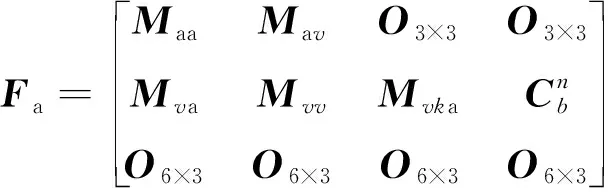
本方案采用卡尔曼滤波器对加速度计的标度因数误差以及加速度计零偏进行估计,状态方程和观测方程如式(8)所示[12-14]
(8)
式中

Xa=[φEφNφUδVEδVNδVUδKax
(9)
观测量Za取为
Za=[δVEδVNδVU]T
(10)
为了提高对加速度计标度因数误差和零偏的可观测性,实际进行滤波时,在完成陀螺零偏估计后,以对准结果作为初始状态,并将陀螺零偏补偿后,设定转位机构标定路径,使每个轴向的加速度计均能朝上朝下并静止一段时间,从而完成加速度计的参数标定。加速度计零偏和标度因数估计原理如图 2所示。
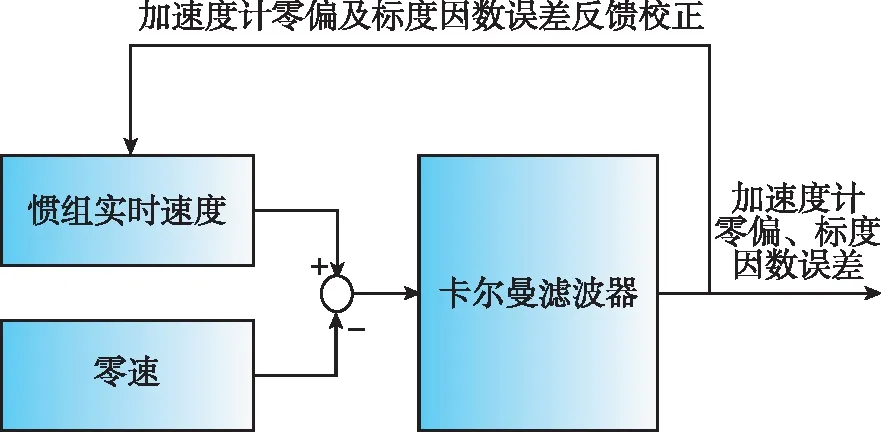
图2 加速度计零偏及标度因数误差估计原理Fig.2 Principle of accelerometer bias and scale factor error estimation
1.2.3 陀螺标定因数标定
陀螺标度因数标定采用数值解析的方式进行解算。完成陀螺零偏和加速度计标度因数误差以及加速度计零偏标定后,进行陀螺标度因数误差的标定。将陀螺各轴恢复到旋转框架零位,然后绕方位轴电机旋转整数周后,计算当前方位角与旋转前方位角的差值,由于零偏已经补偿,因此该值即为方位轴标度因数带来的偏差,由此可算出方位轴陀螺的标度因数误差。同理,将另外两个陀螺均转到俯仰轴,分别绕俯仰轴旋转整周,根据旋转后的俯仰角与旋转前俯仰角的差值可依次标定出另外两个轴陀螺的标度因数误差。
2 快速自标定流程
2.1 陀螺零偏标定
为了缩短标定时间和充分利用历史数据,在实际操作过程中,可以将对准过程中第二个对准位置的惯性器件信息进行存储和复用。即,完成对准后,逆向导航至第二个对准位置开始时刻,并开始以纯惯导导航的姿态信息输出与“凝固”的姿态信息之差作为观测量进行卡尔曼滤波,同时继续采集惯性器件数据50 s。此过程共耗时50 s。
2.2 加速度计零偏及标度因数标定
1)完成陀螺零偏标定后,此时z轴加速度计指向天,静态采集z轴加速度计数据15 s,记录数据。
转动俯仰轴电机90°,使y轴加速度计指天,转动时间为t1,采集y轴加速度计数据15 s,记录数据。
2)继续转动俯仰轴电机90°,使z轴加速度计指向地,转动时间t1,采集z轴加速度计数据15 s,记录数据。
3)继续转动俯仰轴电机90°,使y轴加速度计指向地,转动时间t1,采集y轴加速度计数据15 s,记录数据。
4)转动方位轴电机90°,使x轴加速度计指向前,转动时间t1,再转动俯仰轴电机90°使x轴指向天,转动时间t1,静态采集z轴加速度计数据15 s,记录数据。
5)转动俯仰轴电机180°,使x轴加速度计指向地,转动时间t2,静态采集x轴加速度计数据15 s,记录数据。
将采集的数据,按照前述的方法,利用卡尔曼滤波估计可完成对加速度计零偏和标度因数误差的标定。在实际标定过程中,设计使t1=t2=5 s。
根据上述内容可知,加速度计标定总耗时为120 s。
2.3 陀螺标度因数误差标定
将三轴陀螺恢复至初始位置并进行调平,10 s内完成,记录此时的方位角,然后先将z轴陀螺旋转1 440°,转动时间为36 s,将此时的方位角信息与转动前的方位角输出作差,记转换后的方位角差值为α1(单位为°),则z轴标度因数为

(11)
(12)
则
(13)
然后将水平面内的陀螺分别绕俯仰轴旋转一定圈数,记导航俯仰角信息与转动前的俯仰角输出之差分别为β1、β2(单位为°),按照上述的计算方法可分别得
(14)
(15)
在将z轴转换到前向过程中,需要5 s的调整时间,由上述可知,陀螺标度因数标定总耗时为(36×3+10+5) s=123 s;
综上,快速自标定共耗时(305+50+120+123) s=598 s,标定流程如图 3所示。
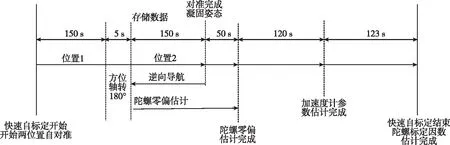
图3 快速自标定流程Fig.3 Flow of fast self-calibration
3 仿真验证
为了验证上述方案的正确性,使用MATLAB进行了仿真验证,由于陀螺和加速度计是分段完成的估计,因此本章也分别对陀螺零偏和加速度计及其标度因数误差进行了仿真,仿真步长统一设置为0.005 s。
3.1 陀螺零偏
根据快速自标定流程,估计陀螺零偏时,复用了150 s的位置2的数据,再考虑到对准后采集的50 s数据,因此等价于陀螺零偏估计共用200 s数据,故仿真时长设置为200 s。
其他仿真条件设置如下。
初始姿态真值:[俯仰角,横滚角,航向角]=[0°,0°,0°];
初始对准误差:[φE,φN,φU]=[10″,10″,55″];
陀螺常值零偏:[εx,εy,εz]=[-0.01(°)/h,0.03(°)/h,0.02(°)/h];
陀螺标度因数误差:[δKgx,δKgy,δKgz]=[10×10-6,8×10-6,-11×10-6];
按照上述仿真条件进行MATLAB仿真,仿真结果如图 4所示。
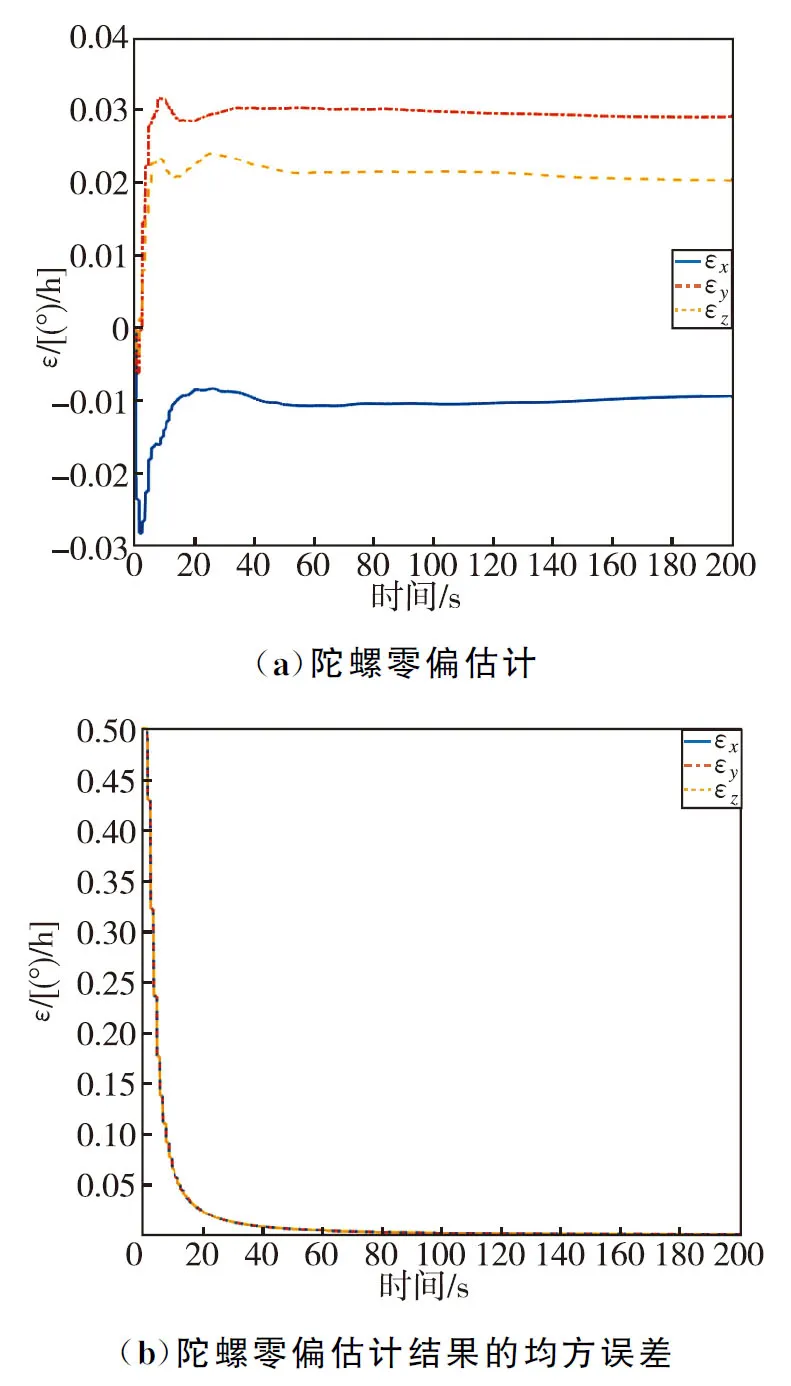
图4 陀螺零偏估计及其均方误差仿真结果Fig.4 Simulation results of gyro bias and its mean-square error
从图 4中可以看出,进入卡尔曼滤波估计后,陀螺零偏很快收敛并逐渐达到稳定状态,最终xyz三轴陀螺零偏估计结果依次为-0.009 4(°)/h、0.029 1(°)/h、0.020 2(°)/h,与仿真设定初值之差优于0.001(°)/h。
3.2 加速度计零偏及标度因数误差
仿真条件设置如下。
仿真时长:120 s;
初始姿态真值:[俯仰角,横滚角,航向角]=[0°,0°,0°];
初始对准误差:[φE,φN,φU]=[10″,10″,55″];
陀螺标度因数误差:[δKgx,δKgy,δKgz]=[10×10-6,8×10-6,-11×10-6];
加速度计标度因数误差:[δKax,δKay,δKaz]=[15×10-6,-18×10-6,12×10-6];
按照上述仿真初始条件和标定流程,采用MATLAB按表 1标定路径生成了六位置翻滚的轨迹,得到的仿真结果如图 5和图 6所示。
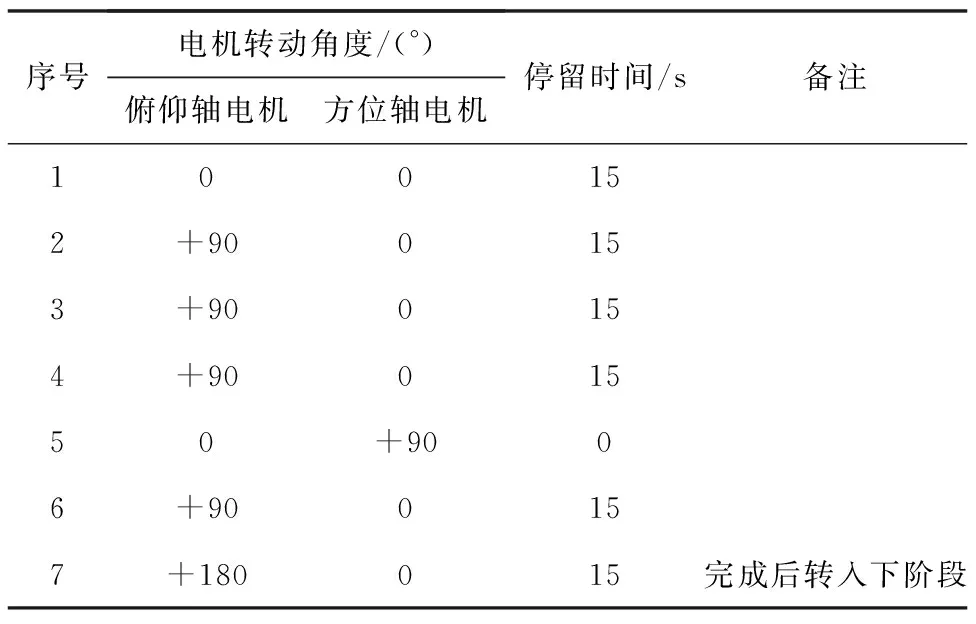
表1 加速度计标定过程电机转动安排Table 1 Arrangement of motor rotation in accelerometer calibration

图5 加速度计零偏及其均方误差仿真结果Fig.5 Simulation results of accelerometer bias and its mean-square error
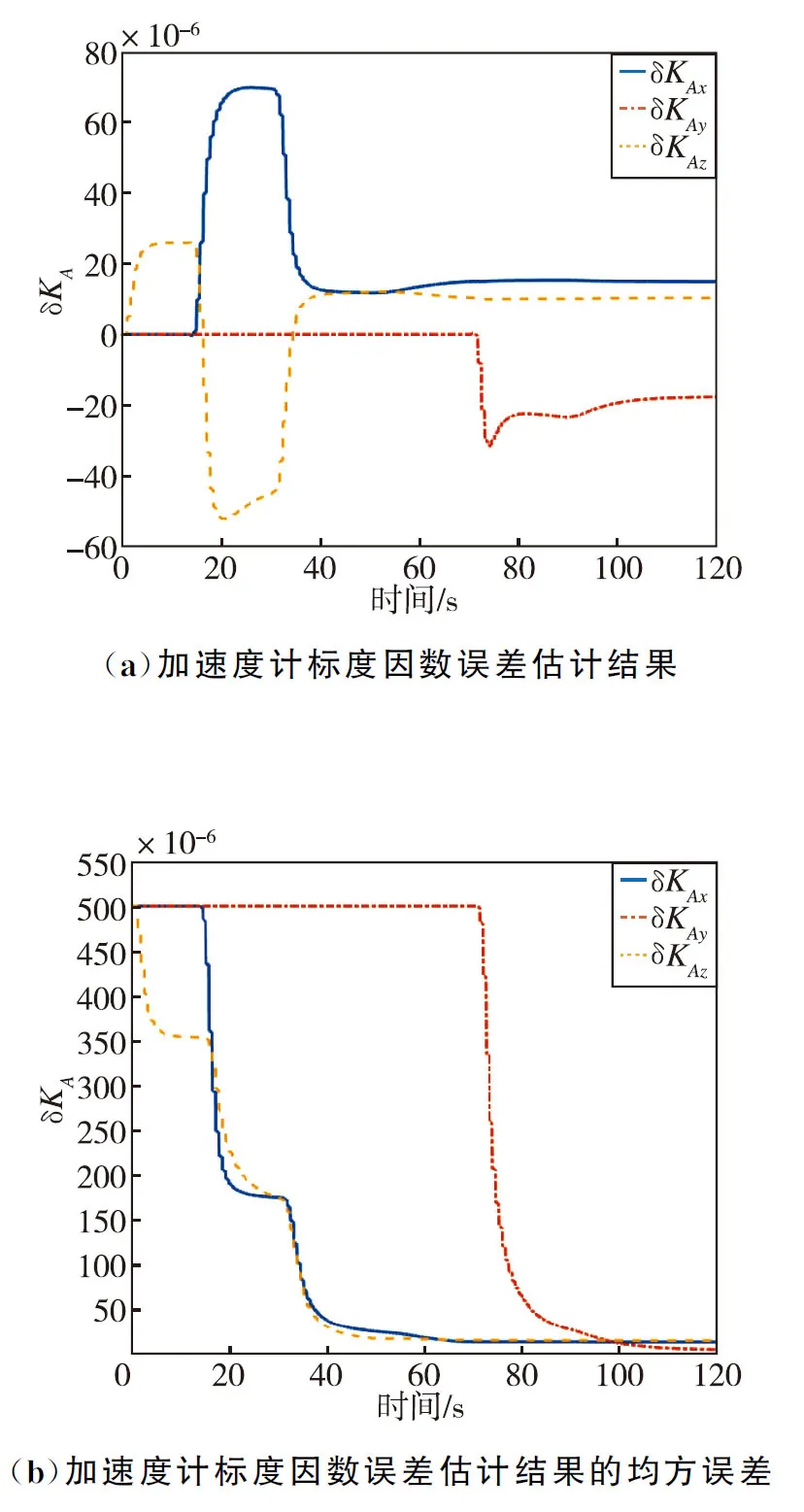
图6 加速度计标度因数误差及其均方误差仿真结果Fig.6 Simulation results of accelerometer scale factor error and its mean-square error
从图 5和图 6中可以看出,进入卡尔曼滤波估计后,加速度计零偏和标度因数误差的估计均方误差曲线均是分段达到收敛状态,这是因为,随着加速度计六位置翻滚,加速度计零偏和其标度因数误差的可观测性逐步达到全部可观测,并最终收敛到稳定状态。三轴加速度计零偏估计结果依次为32.23×10-6×g、-48.32×10-6×g、38.28×10-6×g,与仿真设定初值之差优于2×10-6×g。三轴加速度计标定因数误差估计结果依次为15.11×10-6、-17.55×10-6、10.39×10-6,与仿真设定初值之差优于2×10-6。
3.3 陀螺标定因数误差
陀螺标定因数误差估计采用数值解析的方式,通过MATLAB设置转动路径轨迹数据,计算得到陀螺标度因数误差分别为9.65×10-6、8.57×10-6、-10.26×10-6、与仿真设定值之差均优于1×10-6。
按照标定流程中的标定路径安排,采用MATLAB分别生成相应的仿真轨迹及惯性仪表数据,通过卡尔曼滤波估计及数值解析得到上述结果,仿真结果证明了本文提出的快速自标定方法的正确性和可实现性,并且具有较高的精度。
4 试验验证
为了验证快速自标定方法在实际应用中的效果,采用某型号双轴激光惯组进行了实物试验验证,按照标定流程设定了电机转动路径和停留时间,同时使用上位机采集软件采集了陀螺和加速度计数据,最后通过离线仿真得到图 7~图 9的仿真结果。
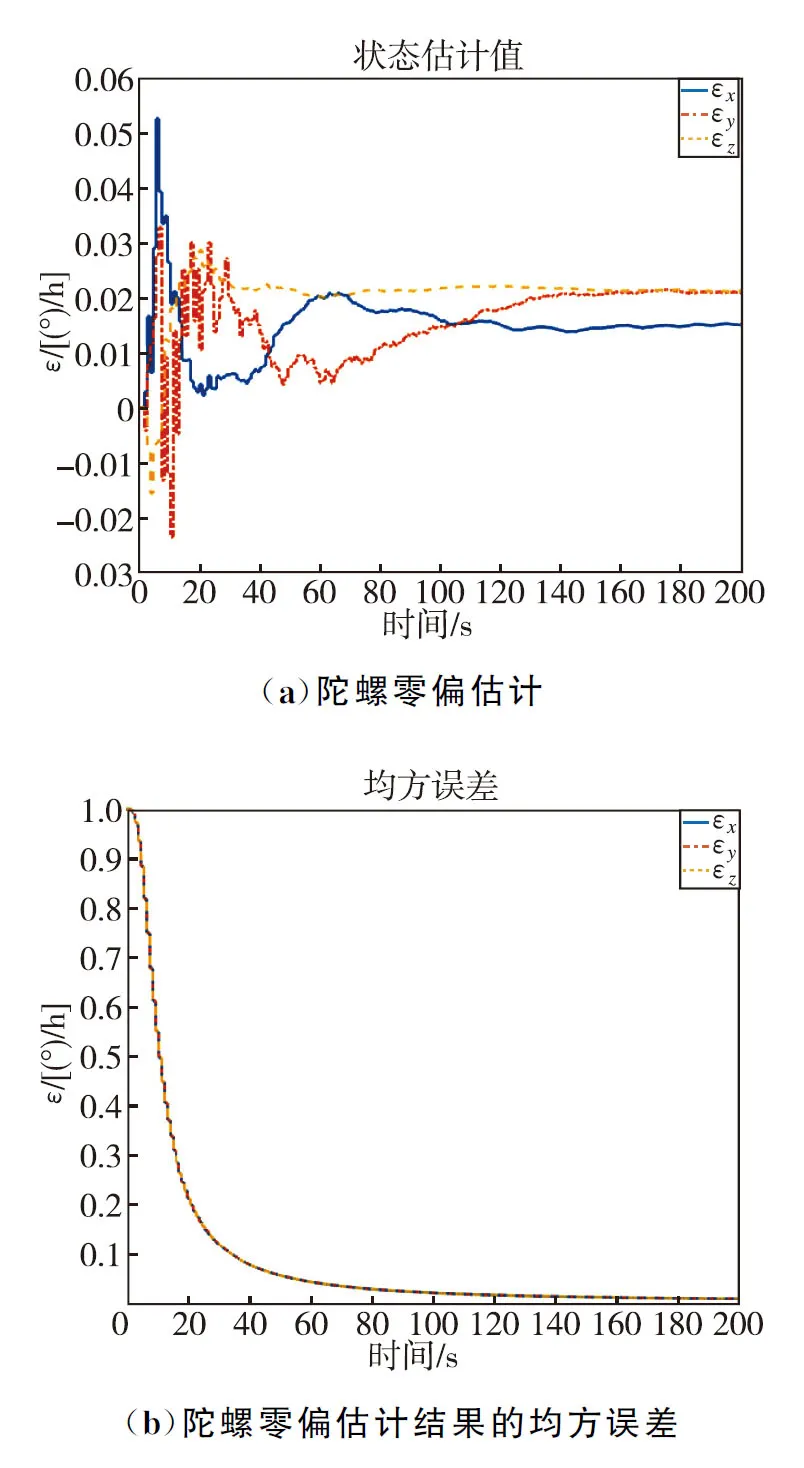
图7 陀螺零偏及其均方误差曲线Fig.7 Curve of gyro bias and its mean-square error
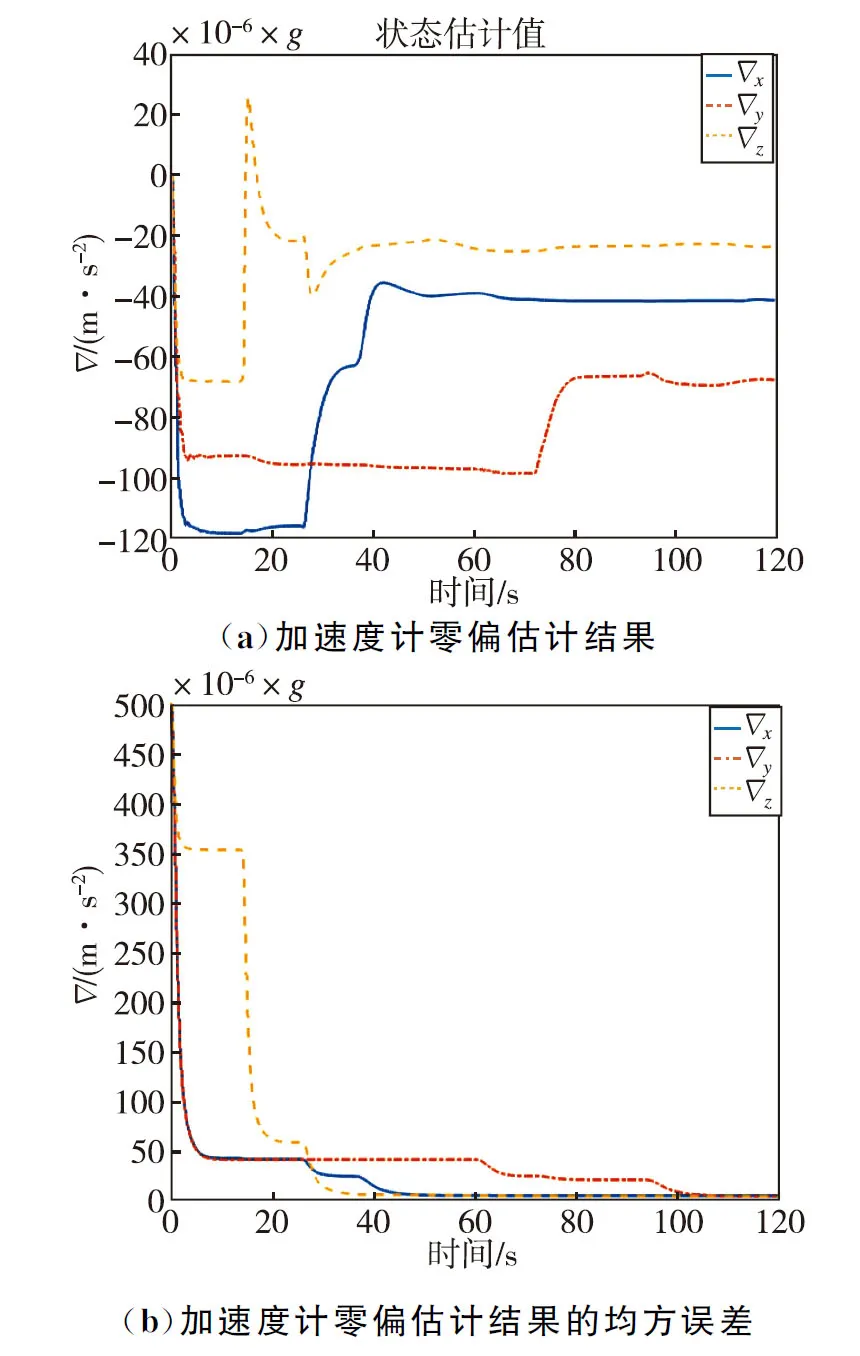
图8 加速度计零偏及其均方误差曲线Fig.8 Curve of accelerometer bias and its mean-square error
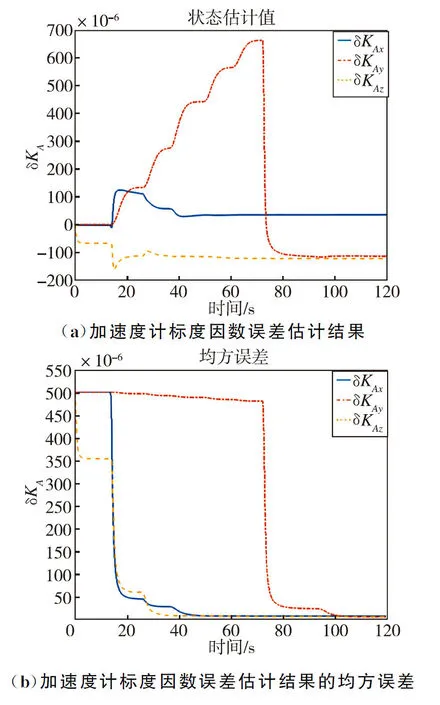
图9 加速度计标度因数误差及其均方误差曲线Fig.9 Curve of accelerometer scale factor error and its mean-square error
从图 7中可以看出,陀螺零偏估计均方误差曲线在开始滤波后能够快速收敛并达到稳态,陀螺零偏估计曲线均在140 s后进入收敛状态。
从图 8和图 9可以看出,加速度计的零偏和标度因数误差估计均方误差收敛曲线相似,均是随着六位置翻滚,加速度计零偏和标度因数误差逐步达到全部可观测,且均收敛到稳定状态。
为了说明标定结果的正确性,采用该惯组进行了6次重复性快速自标定测试,测试结果如表 2和表 3所示。从表中可知,陀螺零偏标定重复性优于0.001(°)/h,陀螺标度因数误差标定重复性优于1×10-6,加速度计零偏标定重复性优于2×10-6×g,加速度计标度因数误差标定重复性优于2×10-6,可见本文所述快速自标定方法正确有效,且有较高的标定精度。
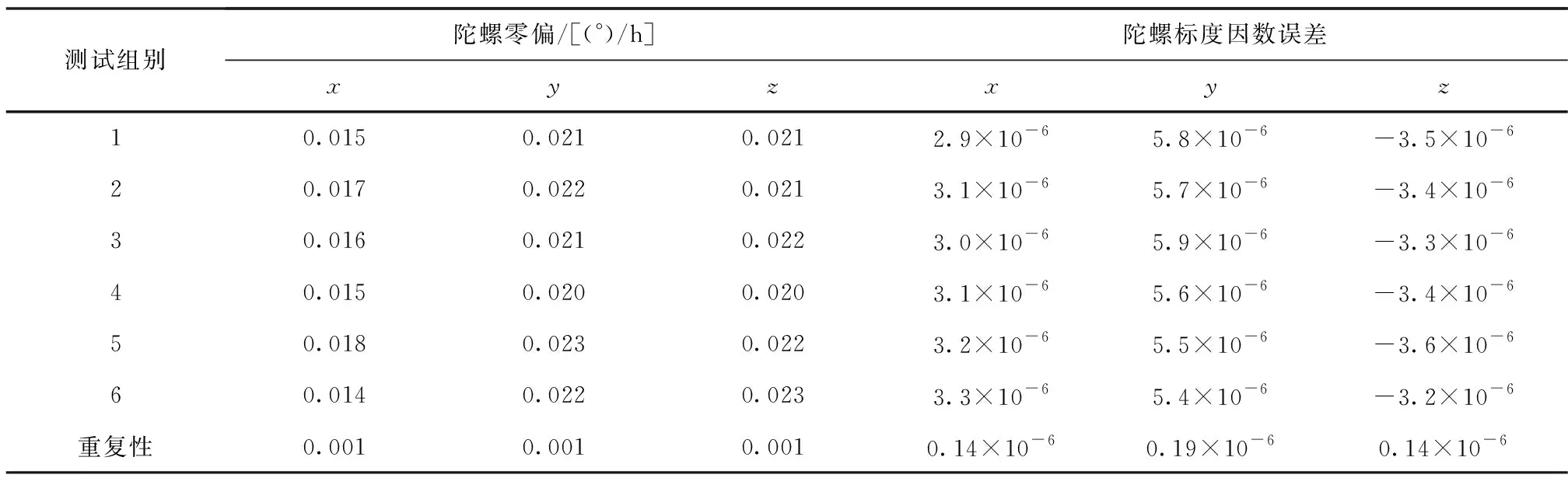
表2 陀螺零偏及标度因数误差快速自标定重复性Table 2 Repeatability of gyro bias and scale error of fast self-calibration
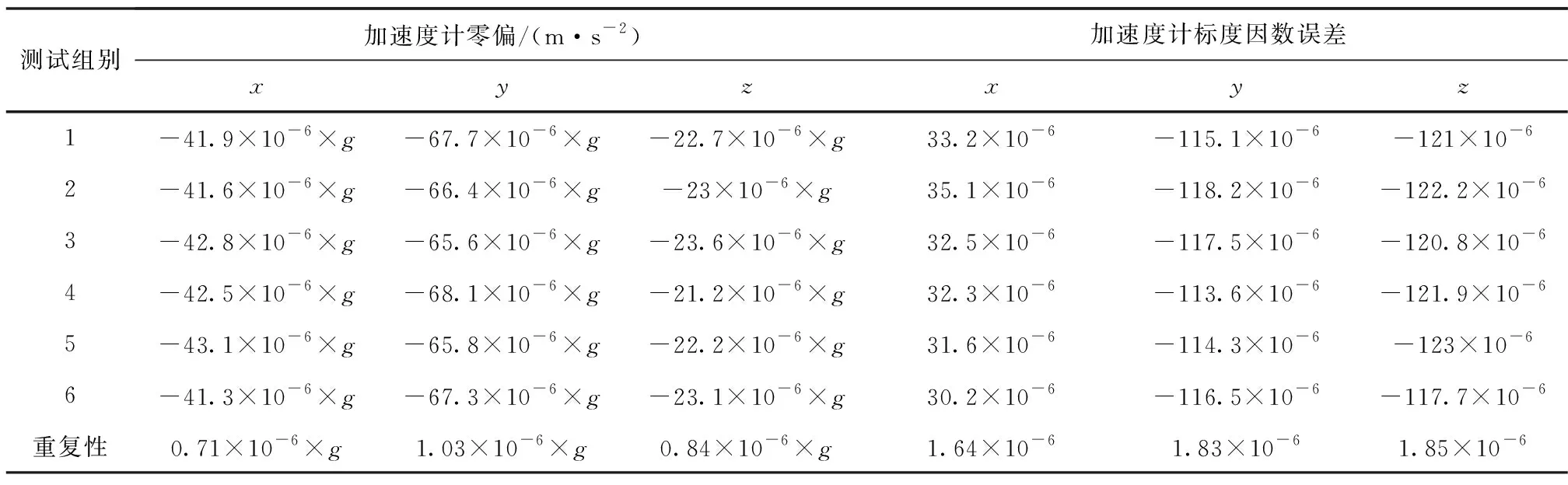
表3 加速度计零偏及标度因数误差快速自标定重复性Table 3 Repeatability of accelerometer bias and scale error of fast self-calibration
通过仿真和试验验证,表明本文所述的基于双轴旋转惯导的重要参数快速自标定方法可以实现10 min内完成陀螺和加速度计的零偏及标度因数误差的估计,且具有较高的精度。
5 结论
本文从实际使用的角度出发,提出了一种基于双轴旋转惯导系统的快速自标定方法。通过合理地安排标定路径,分3步依次标定出陀螺零偏、加速度计标度因数、加速度计零偏和陀螺标度因数共12个重要参数。数值仿真和实际系统试验结果表明,采用本文所述快速自标定方法,10 min内可以完成陀螺和加速度计12个重要参数的标定,相比于传统的标定方法,大幅缩短了标定时间,且具有较高的标定精度。该方法在保证现场标定精度的前提下,实现了现场的快速自标定,有助于缩短武器系统准备时间和快速打击,具有较高的工程应用价值。
