GNSS多系统RTK授时性能分析
2023-07-08刘嘉伟孙保琪袁海波杨旭海
刘嘉伟,孙保琪,韩 蕊,张 喆,王 侃,袁海波,杨旭海
(1.中国科学院国家授时中心,西安 710600; 2.中国科学院精密导航定位与定时技术重点实验室,西安 710600; 3.山东理工大学建筑工程学院,山东 淄博 255049; 4.中国科学院大学,北京 100049)
0 引言
时间是7个基本物理量之一,也是目前测量精度最高的物理量。高精度时间传递在国防建设和经济社会的运行中起着基础性的支撑作用,是现代社会正常运行的基本保障之一[1-3]。目前光纤双向授时手段时间传递不确定度可达100 ps量级[3],但其设备成本和技术要求较高,并且受到光缆覆盖范围的限制。随着全球导航卫星系统(global navigation satellite system,GNSS)的发展与完善,卫星授时的精度目前可达ns量级,因其具有全球覆盖、全天候、全天时、低成本、高精度等特点,也成为应用最广泛的授时手段之一。随着科学技术和社会经济的不断发展,5G移动通信、物联网等领域对卫星授时提出了更高精度、更低成本的需求[4]。
精密单点定位技术(precise point positioning,PPP)可以实现亚纳秒量级的授时精度,虽不受基线长度的限制,但严重依赖实时精密卫星轨道和归算到标准时间的卫星钟差产品。除此之外,PPP解算还需要进行复杂的系统误差改正和参数估计等[5],具有较高的技术门槛。对于城域范围内短距离高精度时间用户,基于实时动态定位(real-time kinematic,RTK)的思想,可以有效解决PPP时间传递较高技术门槛和计算资源成本的问题。RTK授时的核心是将RTK定位技术应用到授时中,流动站通过通信链路实时接收基准站的观测数据,并与本站的观测数据形成一次差分,从而求解流动站与基准站的相对钟差。当基准站外接授时实验室标准时间频率信号UTC(k)时,RTK授时解算的钟差即为流动站的站钟相对于标准时间的相对钟差[6-7], 从而达到授时的目的。
近年来,伴随着移动通信技术的蓬勃发展,有关RTK授时技术的研究逐渐增多。冯延明等人在2010年提出了同时解算接收机位置和相对钟差的4DRTK数学模型并进行了性能分析[8]。2021年董孝松等人以GPS(global positioning system)为例,基于2个月观测数据分析了短基线RTK授时性能,试验表明GNSS RTK授时精度能够达到亚纳秒量级[5]。北斗三号全球导航卫星系统(BeiDou-3 navigation satellite system,BDS-3)正式开通运行,2021年孙保琪等人基于BDS-3新体制信号开展了短基线、零基线RTK授时试验,结果表明短基线授时精度优于0.2 ns,站间钟差的频率稳定度万秒稳在10-15量级;零基线授时精度可达0.02 ns,万秒稳在10-16量级[6]。另有文献[9-12]研究了基于载波相位差分定位技术的时间传递。
然而RTK授时技术主要面向城域范围内的时间用户。在城市环境下,高楼大厦对GNSS信号的遮挡比较严重,当用户接收机接收的卫星数量较少或卫星空间几何结构较差时将会影响授时解算结果。随着全球卫星导航系统的迅猛发展,继美国的GPS、俄罗斯的格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)后,欧盟正在开发的伽利略卫星导航系统(Galileo satellite naviga-tion system,Galileo),我国已全面建成的BDS-3,为城域环境下GNSS多系统融合增加可观测卫星数目、改善卫星空间几何结构提供了保证[13-14]。
目前有关RTK授时的研究主要是基于GPS和BDS-3等单系统开展的,有关GNSS多系统融合RTK授时的研究还鲜有报导。为了更好地验证GNSS多系统融合RTK授时的性能,提高城域环境下的可靠性,本文首先给出多系统RTK授时的观测方程,其次利用中国科学院国家授时中心(National Time Service Center,NTSC)的时频资源,基于GPS、BDS-3和Galileo的观测数据开展GNSS多系统融合RTK授时试验,从授时精度、收敛时间和稳定度3个方面展开分析。
1 Multi-GNSS RTK授时原理及数学模型
RTK授时原理与RTK定位相似,其原理为用户接收机通过通信链路实时接收基准站的伪距和载波相位观测数据,与用户接收机形成站间一次差分,解算用户接收机钟差与用户的三维坐标等。当两测站相距不远时,电离层延迟和对流层折射的影响具有很强的相关性,因而站间单差可消除大部分大气折射误差的影响。多系统RTK授时以GPS系统钟差为基准,分别引入其他系统与GPS的系统间偏差[14](inter-system bias,ISB),观测方程可表示为

RTK授时的参数估计采用扩展卡尔曼滤波的方式进行。对上述观测方程及状态方程线性化后可得
Xk=Φk,k-1Xk-1+Wk-1
Zk=HkXk+Vk
上式中,Xk为状态向量;Φk,k-1为状态转移矩阵;Zk为线性化后的观测值向量;Hk为设计矩阵;Wk-1为过程噪声向量;Vk为观测噪声向量;记过程噪声向量的方差为Qk;记观测噪声的方差为Rk。

其中增益矩阵Kk为

动态或静态模式下,RTK授时中状态向量参数估计包括接收机三维坐标、相对钟差和载波相位模糊度。其中根据流动站接收机动态性能的不同,接收机位置参数可设置为动态、静态参数,分别对应不同的状态转移矩阵。如果还引入流动站的三维坐标参数,此时为固定站坐标模式,对应的参数估计只包括相对钟差和载波相位模糊度。
2 试验平台与策略
2.1 试验平台
依托中国科学院国家授时中心临潼本部和西安场区时间频率资源,建立由两条基线(长度为32.85 km)SE22-SEPT和XIA6-SEPT组成的RTK授时试验平台(图 1)。西安场区时间实验室作为时间基准站,主钟为一台高性能被动型氢原子钟,通过光纤双向时间频率传递链路实时驾驭到UTC(NTSC)。SEPT为时间基准站北斗/GNSS接收机,外接氢原子钟10 MHz和1PPS信号。XIA6和SE22位于临潼本部测定轨大厅,均外接UTC(NTSC)10 MHz和1PPS信号,且共用同一接收机天线。三台接收机的型号均为Septentrio PolaRx5TR,天线型号为SEPCHOKE_B3E6。
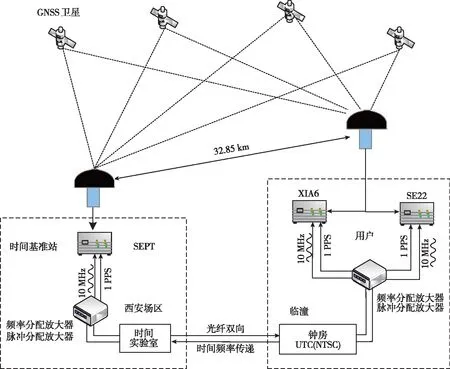
图1 RTK授时试验平台Fig.1 RTK timing test platform
时间基准站原子钟与UTC(NTSC)之间通过光纤双向时间频率传递技术[15](two-way optical time and frequency transfer ,TWOTF)进行实时比对,比对结果采样率为1Hz。根据比对结果,采用调频的方式将时间基准站原子钟驾驭到UTC(NTSC)。本文中将光纤双向时间频率传递的时间比对结果作为短基线RTK授时的精度评估标准。另外文中目前对RTK授时只解算了用户相对于标准时间的时间偏差,没有根据解算的时间偏差对用户时钟进行驾驭。
2.2 试验策略
基于改编的RTKLIB软件[16],分别以SE22、XIA6为流动站,SEPT为基准站开展短基线多系统单频和双频RTK授时试验,涉及动态(kinematic)、静态(static)、固定站坐标(fixed)3种授时模式(动态模式指接收机处于运动状态,即接收机的位置在发生变化;静态模式指接收机处于静止状态,即接收机的位置不发生变化,但位置坐标未知;固定站坐标模式指接收机处于静止状态且位置坐标已知)。实际试验时3种模式的流动站均静态安置。其中单频利用GPS L1、BDS-3 B1C、Galileo E1的观测值,双频利用L1/L2、B1C/B2a、E1/E5b观测值组合,观测数据时段为2021年4月19日—2021年4月30日。详细解算设置如表 1所示,其中截止高度角设置为15°,在保证观测卫星数量的同时降低多路径效应带来的干扰。
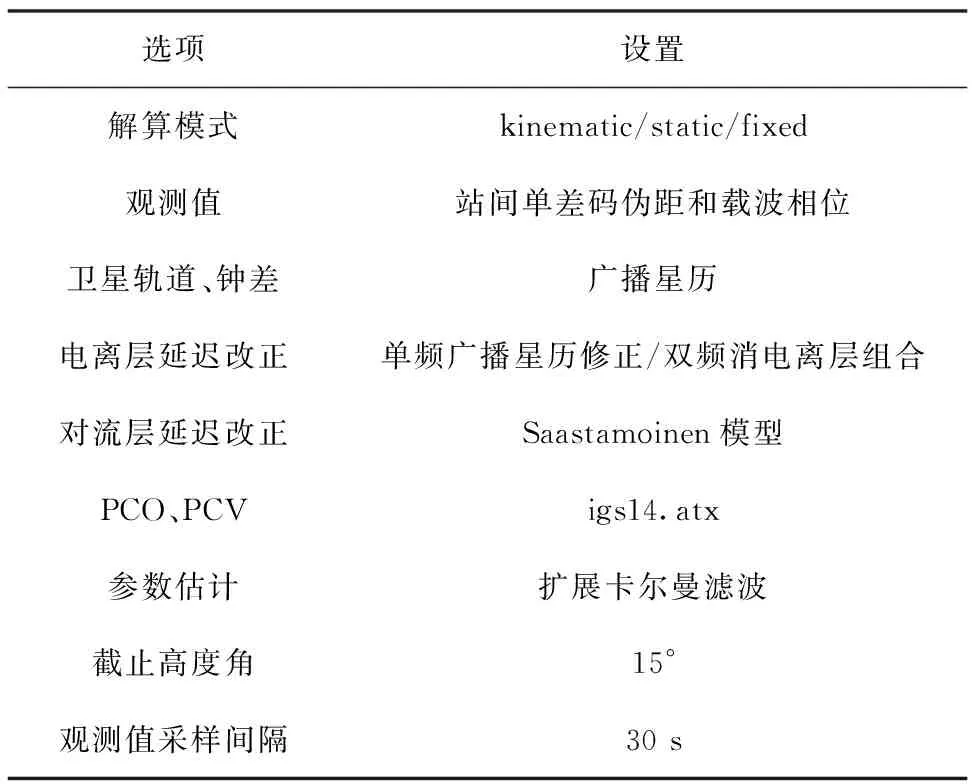
表1 RTK授时解算策略Tab.1 RTK timing solution strategy
3 结果与分析
3.1 可见卫星数
图2给出截止高度角为15°时,试验时段两条基线GPS、BDS-3、Galileo的可见卫星数,GPS与BDS-3的平均可见卫星数为8个,Galileo的平均可见卫星数为5个,三系统可见卫星总数在22个左右。相比于GPS单系统,多系统融合显著增加了可观测卫星的数量,这也使得整个GNSS的可靠性和可用性得到提高。

图2 可见卫星数Fig.2 Number of visible satellites
3.2 多系统RTK授时结果
图 3和图 4给出了SE22单频和双频GPS(a)、多系统(b)RTK授时结果,XIA6的结果与SE22类似,由于篇幅原因不再展示。因为信号传输电缆较长,且经过多级频分、脉分设备,SEPT与SE22两接收机外接时间信号的延迟在700 ns左右。三系统融合12天的授时结果均比较连续平稳。不考虑收敛过程,单频RTK授时静态和固定站坐标模式下峰峰值偏差约在1 ns,动态模式下峰峰值偏差约在2 ns;双频RTK授时三种模式的峰峰值偏差均在1 ns。动态、静态和固定站坐标3种模式的结果趋势符合性较好,但由于每个历元解算一组坐标参数,动态模式的结果噪声最大,固定站坐标模式的收敛时间最短。动态模式下多系统RTK授时结果与GPS单系统相比,钟差起伏更小;动态模式下双频RTK授时结果的噪声明显小于单频RTK授时。
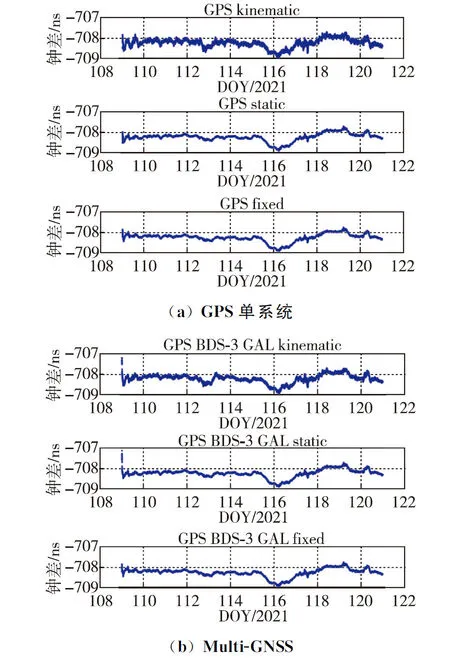
图3 SE22单频RTK授时结果Fig.3 SE22 single-frequency RTK timing results
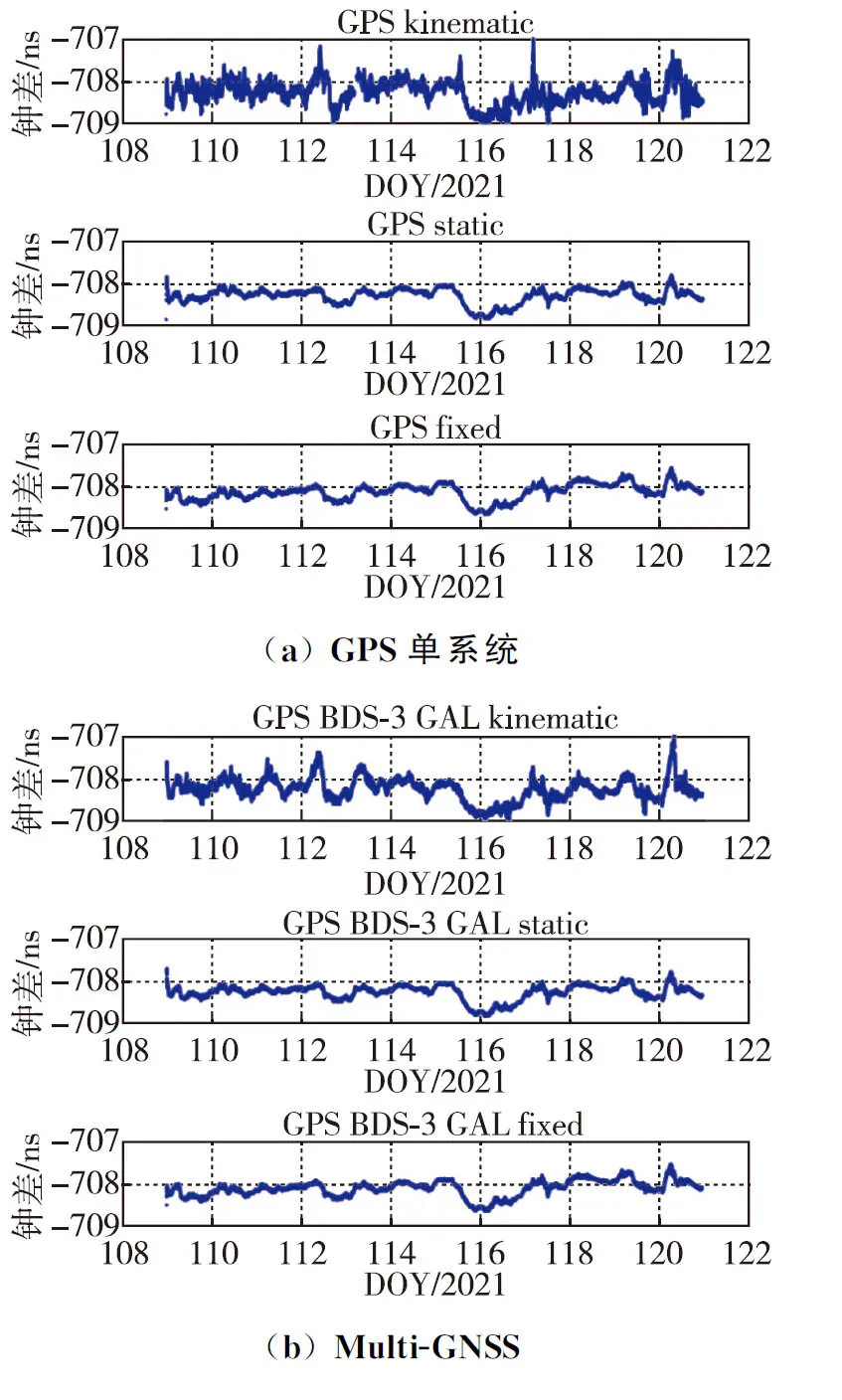
图4 SE22双频RTK授时结果Fig.4 SE22 Dual-frequency RTK timing result
3.3 系统间偏差
多系统RTK授时的站间单差ISB可以间接表征基准站与流动站接收机设备时延的一致性情况,后文中提到的ISB均指站间单差的ISB。通过对站间钟差进行单历元求解,分别得到BDS-3、Galileo与GPS的ISB,并对12 d内的ISB变化进行分析。以单频RTK授时为例,图 5和图 6分别为2021年4月19日—30日SE22-SEPT与XIA6-SEPT基线的ISB时间序列。表 2给出了这些ISB的统计信息,包括均值(MEAN)和标准偏差(STD)。从这些结果中可以看出,3种模式下两条基线的ISB均趋近于0,标准偏差均小于0.1 ns。因为SEPT、SE22和XIA6的接收机类型相同,且所处环境的温度差别很小,由此可以看出这3台接收机设备时延的一致性比较好。相比BDS-3,Galileo与GPS的ISB均值更小,这可能得益于Galileo卫星较高质量的信号特点。由于试验中两条基线的ISB具有较高稳定性,后续可进行建模处理。
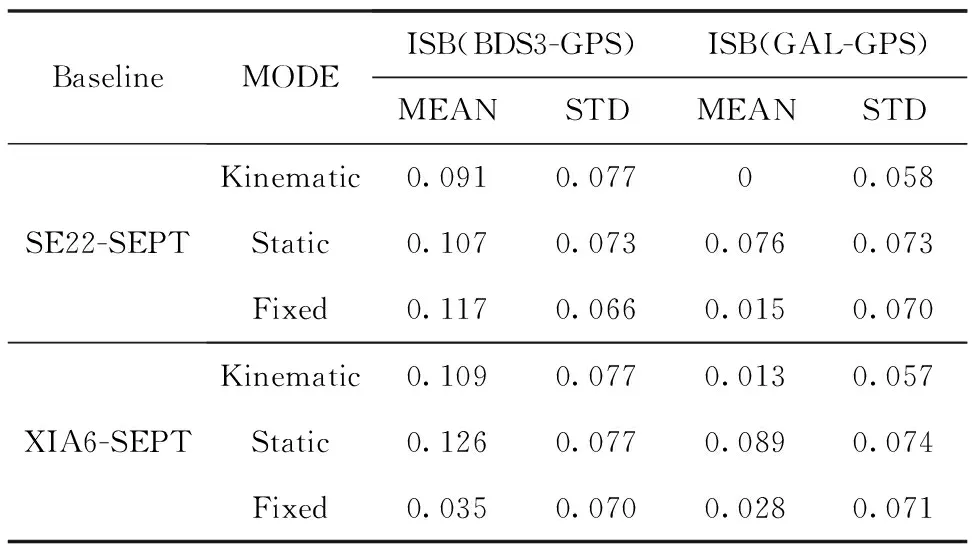
表2 ISB统计信息Tab.2 ISB Statistics ns
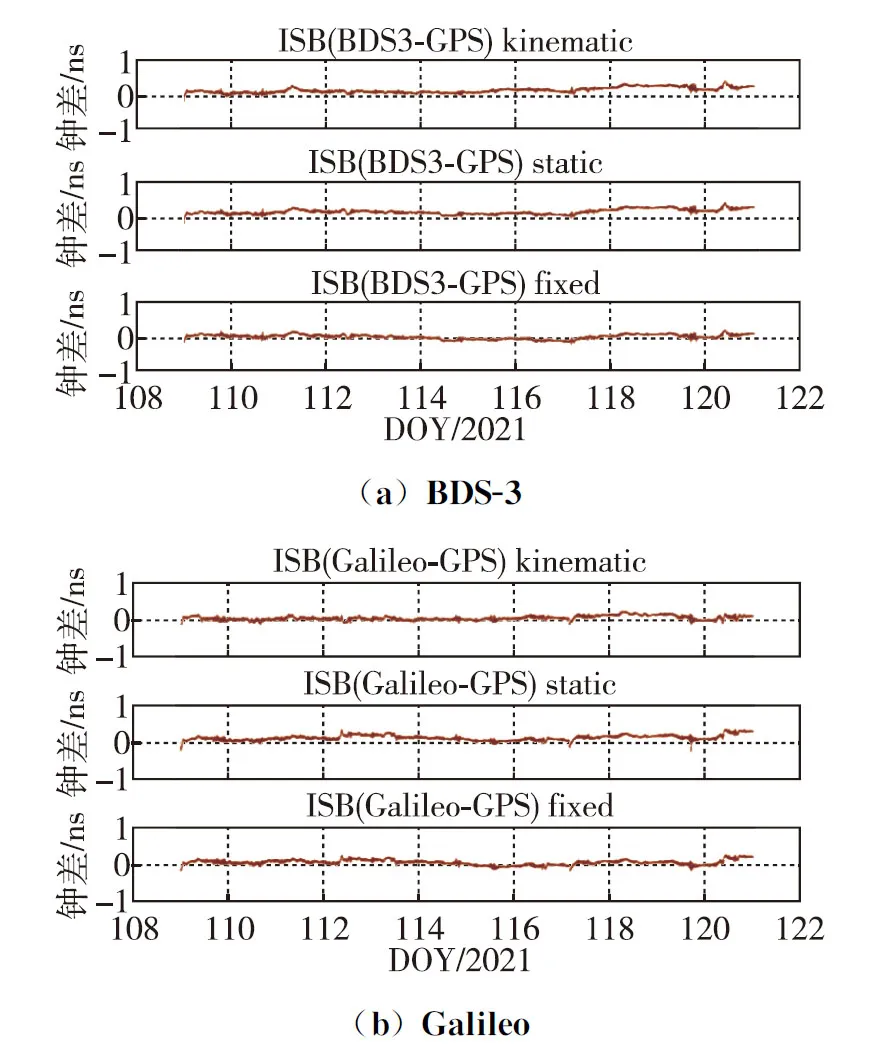
图5 SE22-SEPT基线 BDS-3、Galileo与GPS的系统间偏差Fig.5 Intersystem bias between SE22-SEPT baseline BDS-3, Galileo and GPS
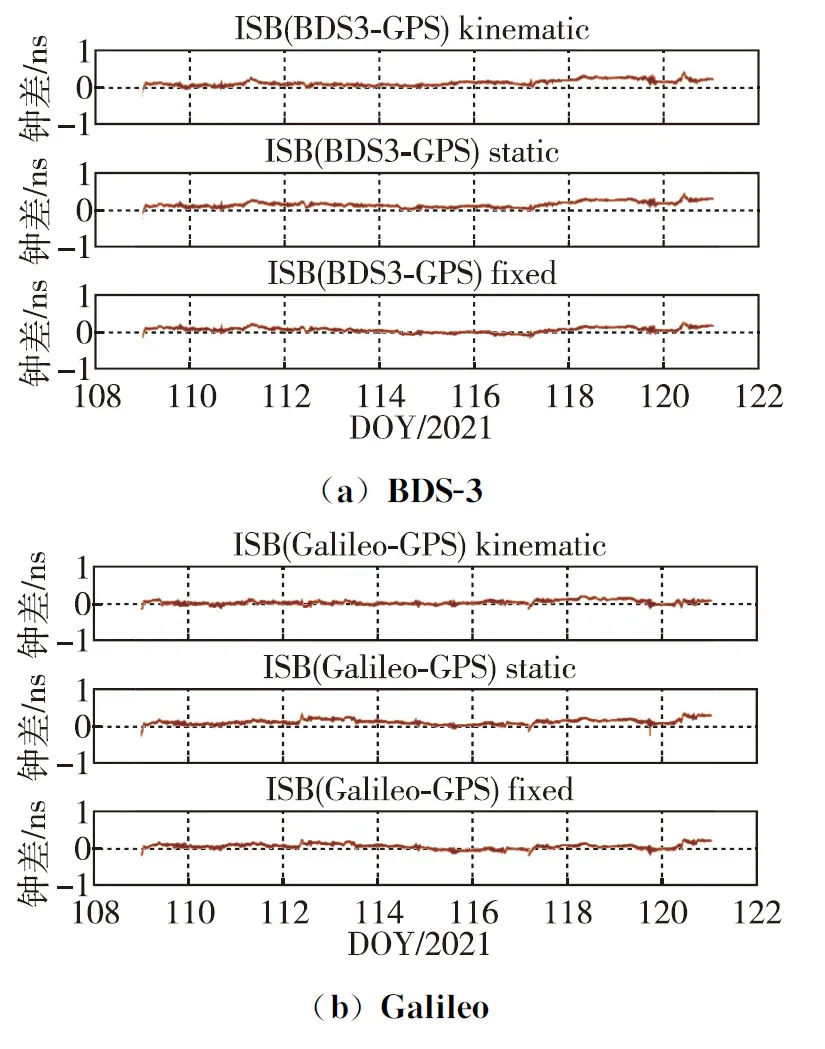
图6 XIA6-SEPT基线 BDS-3、Galileo与GPS的系统间偏差Fig.6 Systematic deviation between XIA6-SEPT baseline BDS-3, Galileo and GPS
3.4 授时精度
试验平台临潼-西安两地钟房之间部署了光纤双向时间频率传递设备,时间传递精度优于100 ps[15],以此作为参考,评估RTK授时的精度。图 7给出了2021年第109天—2021年第114天共6 d的光纤双向时间频率传递结果。从图 7中可以看出,时间基准站原子钟与UTC(NTSC)时间偏差峰峰值小于0.6 ns,大部分时段在±0.2 ns以内,标准偏差为0.07 ns,这表明时间基准站原子钟能够以较高的精准度实时驾驭到标准时间。
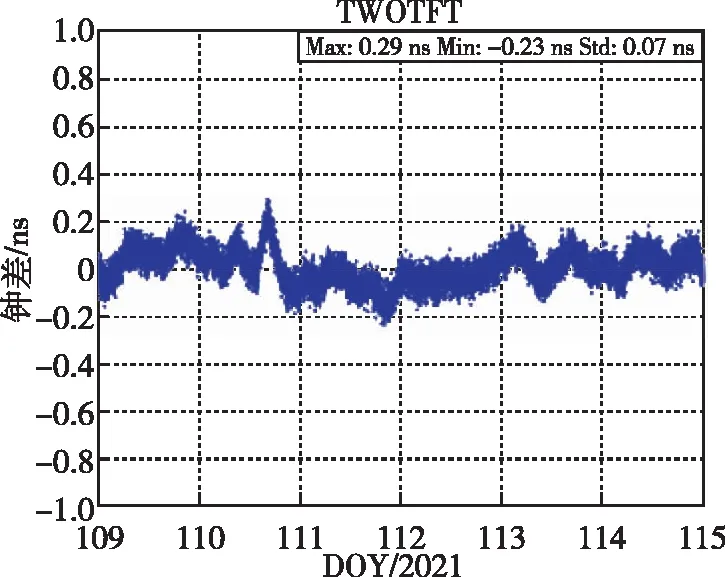
图7 光纤双向时间频率传递结果Fig.7 Optical fibre two-way time-frequency transfer results
因篇幅原因仅给出SE22单频和双频RTK授时结果与光纤双向时间传递结果的差异(图 8和图 9),其中(a)代表GPS单系统,(b)代表多系统。从授时差异图中可以看出,两种授时方式的差值存在一个-708 ns 的绝对误差,这主要是因为RTK授时中SEPT与SE22两接收机外接时间信号的延迟所造成的;不考虑收敛过程情况下单频动态模式峰峰值差异小于2 ns,单频静态、固定站坐标模式以及双频3种模式峰峰值差异均小于1 ns。表 3给出了两条基线两种授时结果差异的标准偏差,同时计算了多系统RTK授时与TWOTFT差异标准偏差相比GPS单系统减少的百分比。动态模式下,两条基线单频多系统授时精度相比GPS单系统分别提高9.13%和9.01%,静态模式分别提高6.09%和11.76%,固定站坐标模式分别提高3.04%和5.79%;双频多系统动态模式授时精度分别提高2.92%和3.01%,静态模式分别提高4.65%和2.41%,固定站坐标模式几乎没有改进。与光纤双向时间传递相比,单频RTK授时结果差异STD优于0.25 ns,双频优于0.15 ns。与GPS单系统相比,多系统单频RTK授时精度改进较双频更为明显。
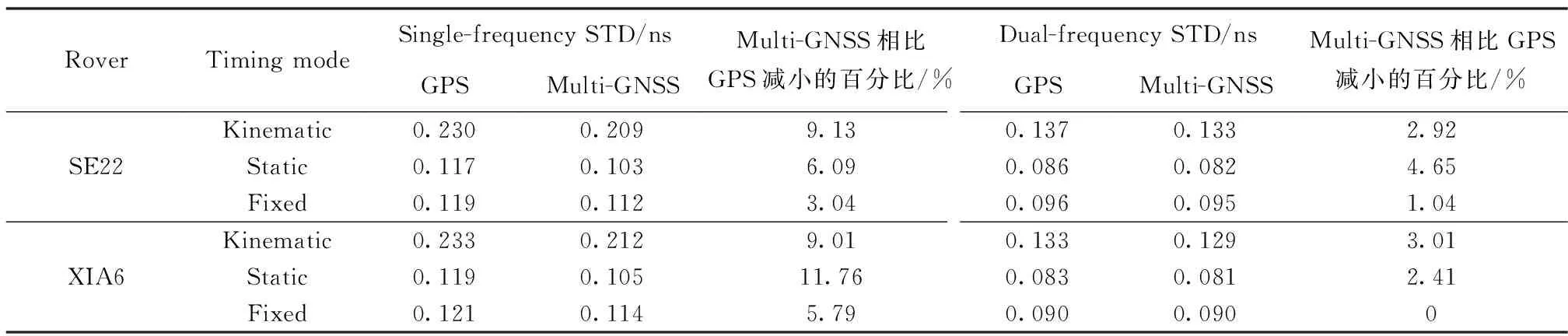
表3 RTK授时与TWOTFT差异标准偏差Tab.3 Standard deviation of difference between RTK timing and TWOTFT
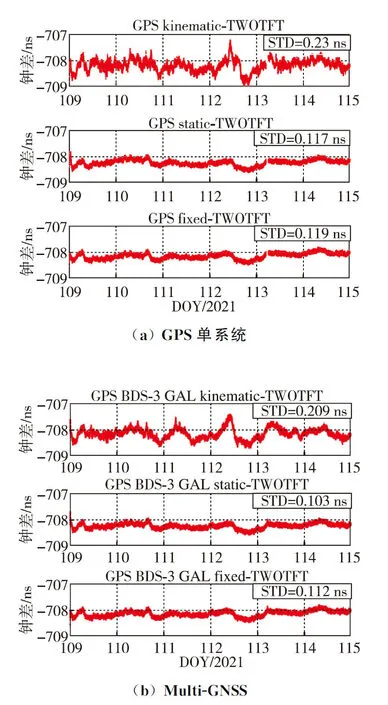
图8 SE22单频RTK授时与光纤双向时间频率传递结果差异Fig.8 Differences between SE22 single-frequency RTK and optical fibre two-way time-frequency transfer
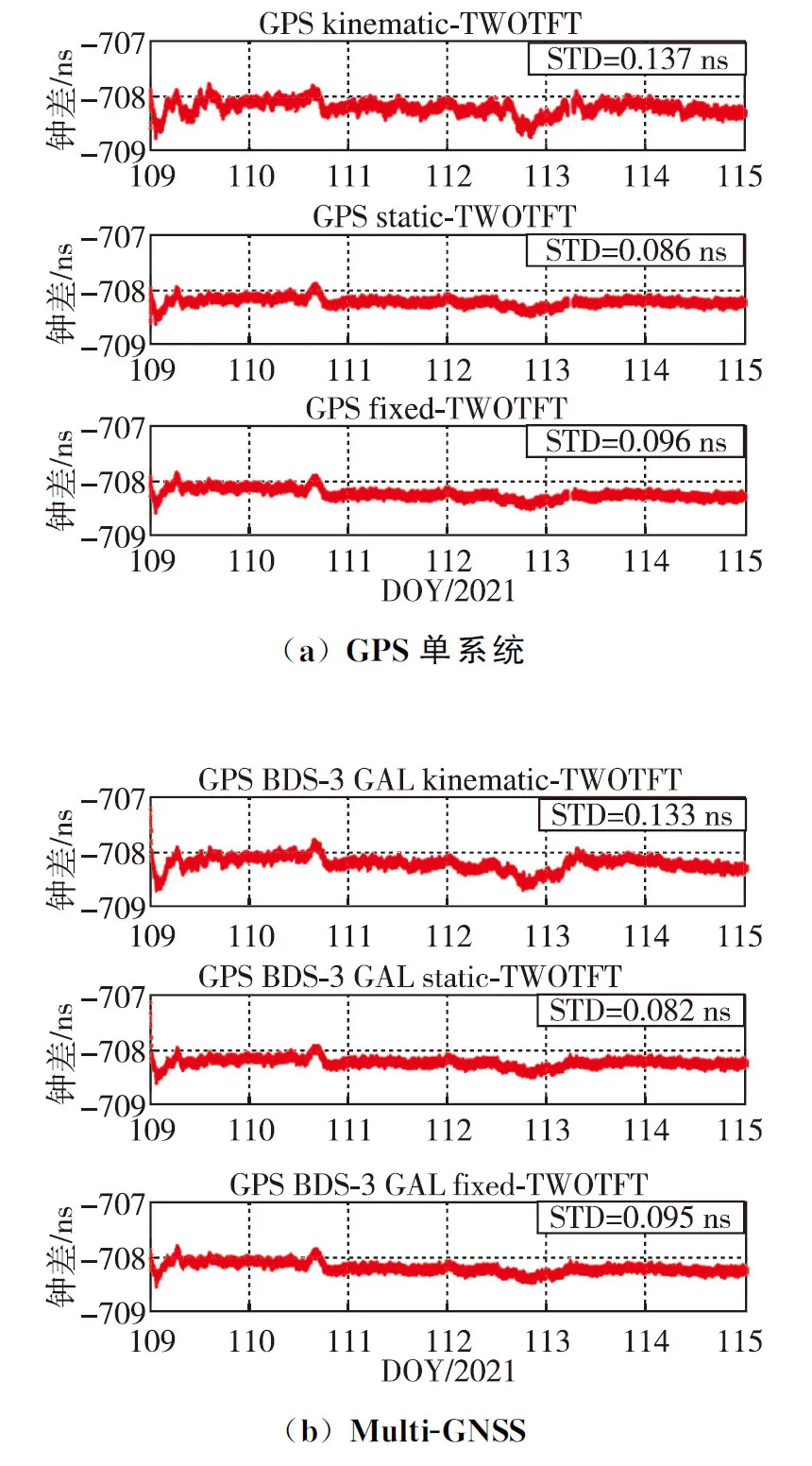
图9 SE22双频RTK授时与光纤双向时间频率传递差异Fig.9 Differences between SE22 dual-frequency RTK timing and optical fibre two-way time-frequency transmission
3.5 收敛时间分析
为量化动态模式和静态模式下多系统RTK授时相比GPS单系统收敛时间缩短的程度,依据流动站的精密坐标,以流动站三维坐标收敛时间间接表征授时收敛时间,规定收敛时间为解算三维方向定位误差小于1 dm并保持至少10个历元所需要的时间[17]。最终以12 d收敛时间的平均值作为最终的收敛时间,并计算了多系统RTK授时相比GPS单系统收敛时间缩短的百分比,如表 4和图 10所示。
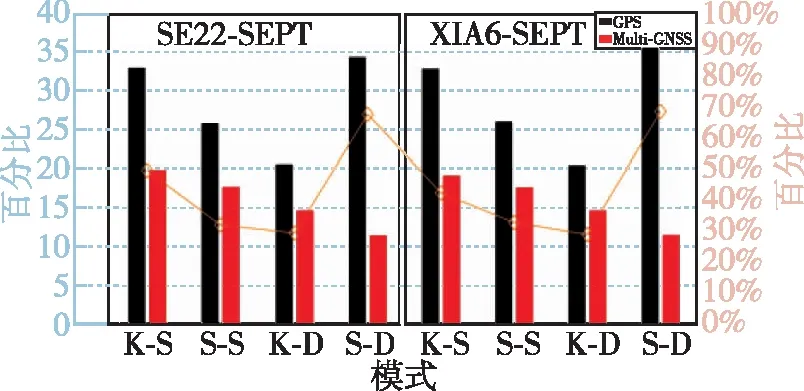
图10 GPS单系统/Multi-GNSS RTK授时的收敛时间Fig.10 Convergence time of GPS single system/Multi-GNSS RTK timing
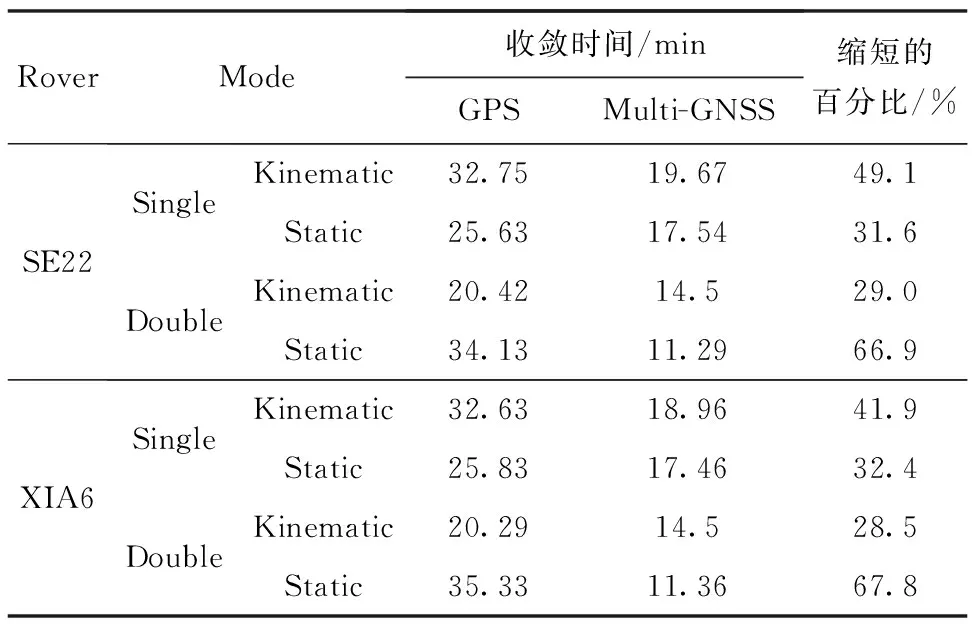
表4 RTK授时的收敛时间Tab.4 Convergence time of RTK timing
图10中黄线代表多系统相比GPS单系统收敛时间缩短的百分比,横坐标中K-S、S-S、K-D和S-D分别表示单频动态模式、单频静态模式、双频动态模式和双频静态模式。由图 10可以看出GPS单系统RTK授时的收敛时间都在20 min以上,而多系统的收敛时间都小于20 min,多系统双频静态模式下收敛时间最短,为11.29 min;动态模式和静态模式下多系统RTK授时的收敛时间明显比GPS单系统缩短,且至少缩短25%以上;静态模式下双频RTK收敛时间缩短最多,两条基线分别缩短66.9%和67.8%。多系统融合使得可见卫星数大幅增多,从而使RTK授时的收敛时间有显著的缩短。
3.6 稳定度
对时间传递稳定度的评价,目前常采用美国学者D.W.Allan提出的表征方法,即阿伦方差[18],该方法通过多次测量后计算振荡器噪声标准差的平均值来描述频率的波动情况。RTK授时站间钟差的频率稳定度以修正Allan偏差(modified Allan deviation,MDEV)表示,如图 11和图 12所示,(a)代表单频,(b)代表双频,将所有固定站坐标模式站间钟差的频率稳定度结果以子图的方式呈现在主图的左下角。多系统RTK授时3种模式万秒稳均进入10-15量级。固定站坐标模式下,多系统RTK授时站间钟差的频率稳定度与GPS单系统几乎一致。
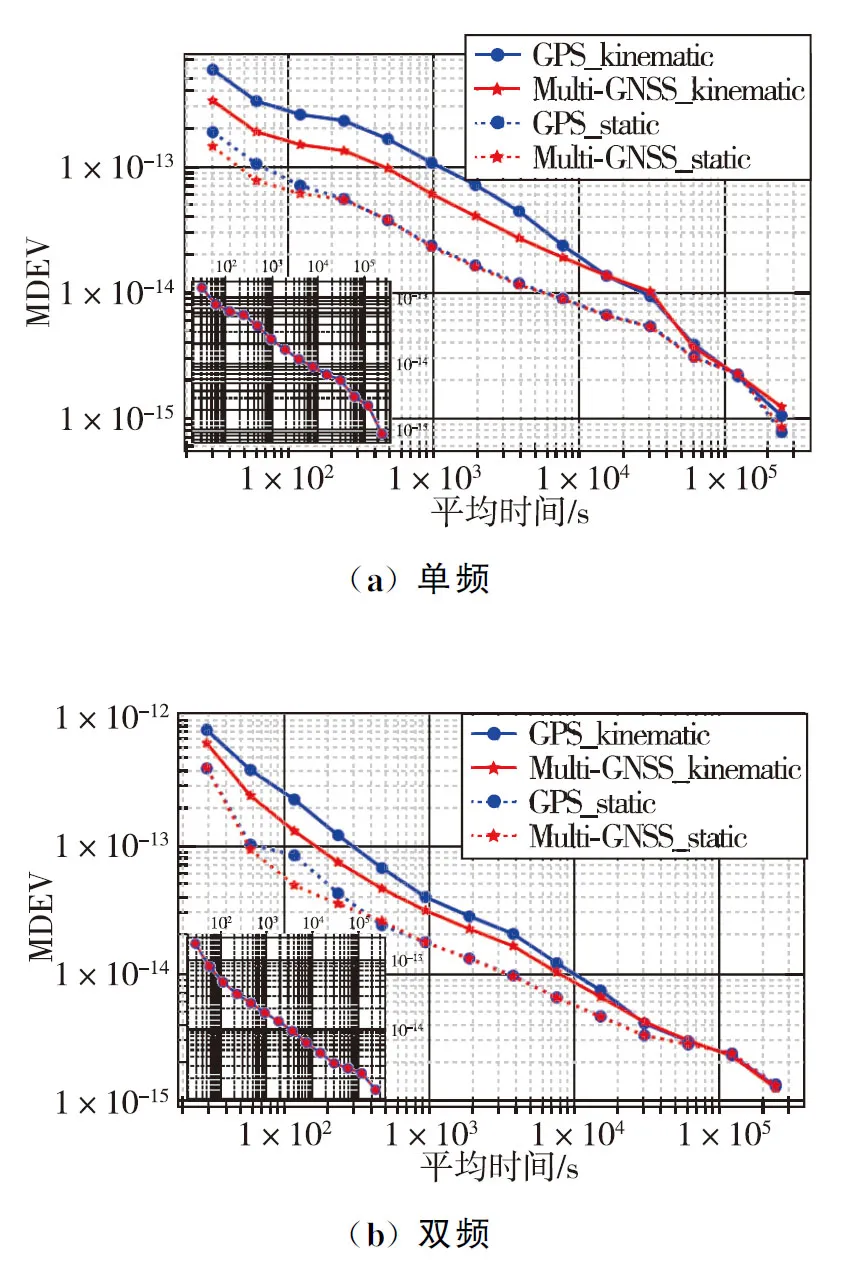
图11 SE22授时频率稳定度Fig.11 SE22 timing frequency stability
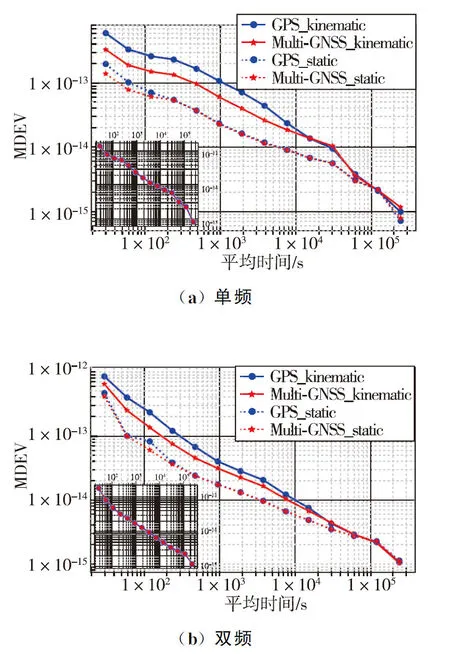
图12 XIA6授时频率稳定度Fig.12 XIA6 timing frequency stability
对于单频RTK授时,平均时间120 s,动态模式下两条基线多系统的时间传递稳定度比GPS单系统分别提高42.5%和42.3%,静态模式下分别提高13.8%和14.2%;平均时间960 s,动态模式分别提高43.8%和43.75%,静态模式分别提高2.92%和2.81%。对于双频RTK授时,平均时间120 s,动态模式分别提高43.44%和42.09%,静态模式分别提高42.12%和27.18%;平均时间960 s,动态模式分别提高21.74%和22.26%,静态模式分别提高0.33%和1.23%。动态模式下多系统RTK授时的稳定度相比GPS单系统有着明显的优势,静态模式下也有一定程度的改善。动态和静态模式下,多系统RTK授时的短期稳定度相比GPS单系统有着不同程度的改善,但随着平均时间的增长,这种改善也在明显减弱。
4 结论
利用中国科学院国家授时中心3个GNSS跟踪站的BDS-3、GPS和Galileo观测数据,开展短基线多系统单频和双频RTK授时试验,涉及动态、静态和固定站坐标3种模式,两条基线的结果表明:
1)与光纤双向时间频率传递结果比对,多系统单频RTK授时结果差异STD优于0.25 ns,双频优于0.15 ns。3种模式下单频多系统RTK授时相比GPS单系统均有一定程度的改善,双频改善较少。动态模式下,单频多系统授时精度较GPS单系统分别提高9.13%和9.01%,静态模式分别提高6.09%和11.76%,固定站坐标模式分别提高3.04%和5.79%。
2)多系统融合使得RTK授时的收敛时间比GPS单系统明显缩短,且至少缩短25%以上。静态模式下双频RTK收敛时间缩短最多,两条基线分别缩短66.9%和67.8%。
3)多系统RTK授时3种模式站间钟差的万秒稳均进入10-15量级,平均时间在120~960 s,动态模式和静态模式下短期稳定度相比GPS单系统均有着明显的改善,但随着平均时间的增长,这种改善也在明显减弱。
4)3台接收机设备时延的一致性比较好。3种模式下RTK授时的站间钟差ISB具有较高稳定性,后续可将其建模处理。
相比GPS单系统,多系统GNSS显著增加了可观测卫星的数量,使得动态模式和静态模式下RTK授时的收敛速度和短期稳定度得到显著的提高,授时精度也有一定程度的改善。试验结果可为城域环境下GNSS多系统RTK授时的应用推广提供一定的参考。
