基于改进型LADRC的光伏逆变器母线电压控制
2023-07-07周雪松王佳垚马幼捷
周雪松 王佳垚 马幼捷
(天津理工大学电气电子工程学院 天津 300384)
0 引 言
太阳能是最具发展前景的可再生能源,解决了传统化石能源引发的一系列环境问题。光伏发电技术受到全世界的研究和关注[1-3]。光伏并网逆变器是实现直流-交流转换的重要电力电子变换器,是光伏发电系统中前级DC/DC变换器和电网之间的接口装置,在光伏并网发电中起到了关键性作用。逆变器具有非线性、强耦合等特点。光伏并网逆变器良好的控制效果可以保证并网顺利地完成。因此,光伏逆变器的控制效果引起了国内外学者的关注和研究[4-6]。目前双闭环PI控制仍然是使用最多的逆变器控制方式,但在系统受到扰动时,其控制效果和精度往往不能满足需求。文献[7]采用传统PI控制方式对逆变器进行控制,但是如果想要使系统稳定需要增大PI控制器的增益,且控制效果不尽如人意。文献[8]采用了无差拍控制策略,在此控制策略下,瞬时扰动可以消除,但是不可以对周期性扰动进行完全抑制。文献[9]采用的方法是增加控制器的数量,这会使系统变得非常复杂。文献[10]采用重复控制,但是这种控制方式会让其在过渡过程中始终存在一个基波周期延迟。
自抗扰控制技术首先由韩京清[11]提出,自抗扰控制器是在传统PID控制基础上,结合现代控制理论知识所提出的更适合实际系统的控制策略。由于自抗扰控制器(ADRC)参数较多,调节起来较为困难,在此基础上高志强博士通过将ADRC线性化,提出了线性自抗扰控制器(LADRC),将可调参数进行简化,线性自抗扰控制器更加适用于实际工程。但是其控制性能由于参数的简化也会得到降低。
为了提高自抗扰控制器的控制性能,本文提出一种基于新型LADRC的光伏并网逆变器控制策略。这种新型线性自抗扰控制器在传统自抗扰控制器中引入校正环节,并将此控制器用于电压外环进行控制。此改进方法可以使得高频衰减能力增强,直流母线电压可以更稳定,抗干扰能力增强。多工况下的仿真验证了改进型LADRC的有效性,其具备更好的动态性能和抗干扰能力。
1 光伏并网逆变器建模及传统LADRC设计
1.1 光伏并网逆变器建模
图1为光伏并网逆变器结构,其中:L为等效滤波电感;R为滤波电感等效串联电阻;C为母线滤波电容。
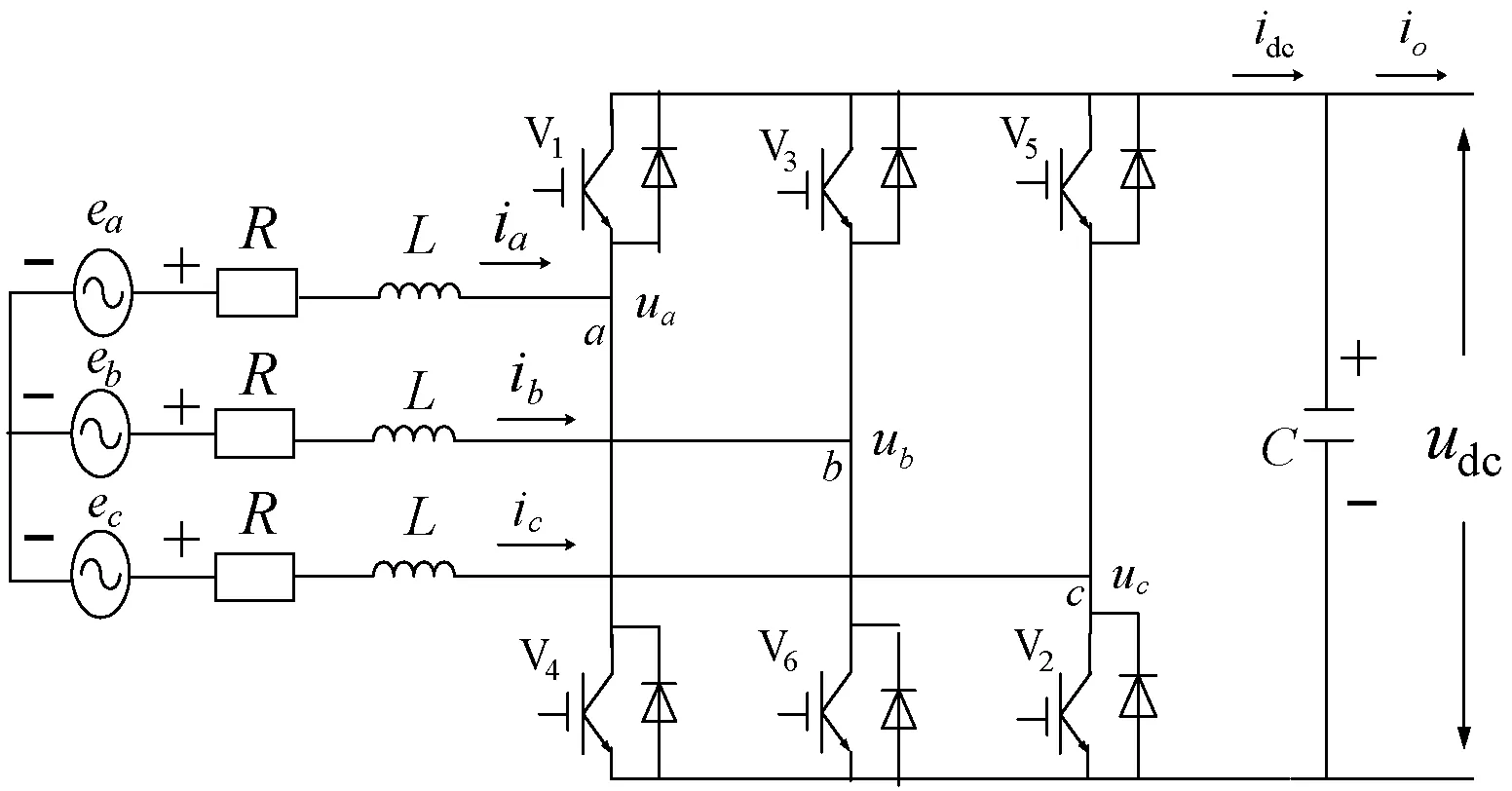
图1 光伏并网逆变器拓扑结构
根据图1和基尔霍夫定律,可以得到:
(1)
式中:ia、ib、ic为三相电网电流;ea、eb、ec为三相电网电压;ua、ub、uc为电网侧逆变器输出相电压。
在三相静止坐标系下网侧逆变器数学模型可以得到:
(2)
式中:udc为直流母线电压。经过如下变换,可将三相静止坐标系下的模型变换到d、q两相旋转坐标系下的数学模型:
(3)
(4)
经过式(3)、式(4)变换,可以得到网侧逆变器在d、q旋转坐标系下的数学模型:
(5)
式中:ed、eq为在dq旋转坐标系下电网电压分量;id、iq分别为d轴、q轴电流分量;ud、uq分别为逆变器输出电压在旋转坐标d轴、q轴上的分量;sd、sq为在dq旋转坐标系下开关函数的分量;ω为电角速度。
经过式(5)变换可得:
(6)
由式(6)可得,光伏并网逆变器可以等效为二阶系统,由此可以设计二阶自抗扰控制器。
1.2 传统二阶LADRC设计
线性自抗扰控制器(LADRC)由线性扩张状态观测器(LESO)、线性跟踪微分器(LTD)和线性状态误差反馈率(LSEF)构成。其中LESO是LADRC的核心,可以解决主动抗扰技术中扰动观测这一核心问题。将系统总合扰动扩张为一全新状态变量,对系统状态变量和总合扰动进行观测。LTD可以安排过渡过程,很好地解决了系统快速性和超调之间的矛盾。传统LADRC控制框如图2所示。其中:r为给定直流母线电压参考值;b0为控制增益;u为控制量;z1、z2、z3为各状态变量及总扰动的观测值;y为系统的输出。

图2 传统LADRC结构
LADRC不依赖于具体的系统模型,通过扰动补偿环节可以将被控对象变为积分串联型,便于控制。下面将以二阶系统为例介绍二阶LADC,设二阶被控对象为:
(7)
式中:y、u、ω分别为输出、输入和扰动。a1、a0、ω均未知。b部分已知(已知部分为b0)。则式(7)可以改写为:
(8)

(9)
对应的三阶LESO为:
(10)
由极点配置原理,将特征方程极点配置在同一位置(-ωo、ωo为观测器带宽)。
由λ(s)=|sI-(A-LC)|=(s+ωo)3=s3+l1s2+l2s+l3可得:
(11)
线性状态误差反馈率为:
u0=kp(r-z1)-kdz2
(12)
扰动补偿环节为:
(13)
(14)
由式(14)可知,被控对象被等效为积分串联型。
(15)
通过以上理论分析,LADRC可简化为控制器带宽ωc、观测器带宽ωo和b0三个可以调节的参数。
2 改进型二阶LADRC设计
2.1 传统三阶LESO研究分析
LESO是LADRC的核心,LADRC的控制性能受到LESO对扰动估计能力的影响,它可以对系统总和扰动进行观测并给予补偿,将被控对象变为积分器串联型,便于控制。下面将在传统LESO基础上,根据被控对象的特征,设计改进型LESO。
根据式(10),可以求得z1、z2、z3的传递函数为:
(16)
根据式(9)有:
(17)
根据式(16)和式(17)可得:
(18)
由式(18)可知,φ(s)是一个三阶系统,它的频率特性如图3所示。在时域上与典型的二阶系统类似,存在快速性与超调的矛盾;在频域上存在严重的相位滞后和幅值衰减。以上分析的这些特点使得传统LESO的扰动观测性能并不理想。

图3 改变观测器带宽
2.2 改进型三阶LESO研究分析
从图3可以看出,增加观测器带宽ωo可以明显改善LESO扰动观测能力,然而由于观测噪声和其他因素的影响,这样的方法改善LESO的性能是有限的。为了增加LESO观测带宽,同时要避免减少高频噪声的抑制能力,φ(s)参照串联校正的方法进行改造,可以得到:
(19)
式中:Tc为超前时间常数;α为系数。
如图4所示,传递函数幅频特性曲线显示了传统LESO与改进型LESO的扰动估计能力。可以看出,在保持观测器带宽不变的前提下,改进型LESO可以明显提高扰动观测能力,同时高频衰减能力相较于传统LESO明显增强。

图4 改进型LESO与传统LESO扰动估计能力比较
由式(10)和式(19)可得改进型LESO状态空间为:
(20)
2.3 改进型LESO抗扰性能分析
由式(12)、式(13)和式(20)可以获得传递函数为:
(21)
式中:
l1)s2+(αTcl3+l2+Tcl3)s+l3]
[l3+kdl2+kpl1+kdTcl3+αTc(l3+Tckpl3+
kdl3+kpl2)]s2+(kdl3+kpl2+kpTcl3+
kpαTcl3)s+kpl3
N(s)=αTcs4+[(1+αTc(kd+l1)]s3+[kd+l1+
αTc(Tcl3+kp+l2+kdl1)]s2+(kp+l2+
kdl1+αTcl3)s
根据式(9),被控对象可以记为:
(22)
由式(21)、式(22)可以将系统的结构简化为如图5所示结构。

图5 LADRC简化结构
根据图5,系统的闭环传递函数可以得到:
(23)
根据图5与式(23)可知,当不计扰动项影响时,对控制器带宽ωc进行调节,可以解决快速性与超调之间的矛盾,即实现系统快速无超调地对输入的跟踪。图6为传统LADRC与改进型LADRC的扰动传递函数bode图,Tc=0时为传统LADRC,当Tc不断地增加,LADRC的抗扰性能明显提高。

图6 改进型LADRC抗扰性能分析
3 仿真实验
为了验证本文所提改进型双闭环控制策略的有效性,在MATLAB/Simulink仿真平台上搭建光伏并网系统仿真模型,本文光伏并网逆变器的控制策略为基于改进型自抗扰控制器的电压外环控制和PI电流内环双闭环控制策略。光伏系统参数和ADRC控制器参数见表1和表2。

表1 仿真系统参数

表2 控制器参数
图7为光照强度突变下传统ADRC和改进型ADRC控制效果对比,令直流母线电压Udc初始值为500 V,由图7(a)可见,0.7 s时光照强度由1 000 W/m2阶跃变化至900 W/m2,在1 s时又有900 W/m2变为1 000 W/m2,通过超调和调整时间性能指标对改进LADRC和传统LADRC的控制效果进行比较和分析。由图7(b)可知,传统LADRC的超调为2.4%,而改进型LADRC的超调为1.4%。传统LADRC的调整时间为0.1 s,而改进型LADRC调整时间为0.05 s。对于图7(c),传统LADRC超调为3.6%,而改进型LADRC超调为2.4%。传统LADRC调整时间为0.1 s,改进型LADRC经过0.05 s后趋于稳定。在光照强度两次突变过程中,改进型ADRC受光照强度突变影响较小,达到稳态时间更短,直流母线电压波动范围更小,具有更好的抗扰性能。

图7 光照强度突变下控制效果对比
图8为光伏电池温度突变状况下改进ADRC和传统ADRC控制效果对比,在1.5 s时刻温度由25 ℃突变至30 ℃。可以看出,传统LADRC的超调为3.8%,改进型LADRC超调为3.4%;传统LADRC调整时间为0.06 s,改进型LADRC调整时间为0.03 s。改进型LADRC可以更好地稳定直流母线电压,调节时间更短,具有更好的抗干扰能力。

图8 温度突变下控制效果对比
图9为电网加载、减载(20 MW)工况下,改进型ADRC与传统ADRC控制效果对比。由图9(a)可知,传统LADRC超调为2.2%,改进型LADRC超调为1.6%。传统LADRC调整时间为0.1 s,改进型LADRC经过0.03 s后趋于稳定。对于图9(b),传统LADRC超调为2.4%,而改进型LADRC超调为2%。传统LADRC调整时间为0.1 s,而改进型LADRC调整时间为0.03 s。改进型ADRC调节时间更短,可以更快达到稳态,电压波动范围更小,具备更好的动态性能和抗干扰能力。

图9 电网加载、减载工况下控制效果对比
4 结 语
本文以光伏并网逆变器为被控对象,设计一种新型二阶自抗扰控制器。采用双闭环控制策略,为了提高传统LESO的扰动观测能力,在传统LADRC基础上引入校正环节,有效解决快速性与超调之间的矛盾。改进型LADRC的高频衰减能力明显提高,通过频域分析法分析改进型LADRC的抗扰性能。最后通过搭建光伏系统仿真模型,在多工况下对不同控制策略的控制效果进行仿真对比,通过多工况下的仿真验证了本文所提改进型LADRC控制策略的正确性和可行性。改进型LADRC可以更好地稳定直流母线电压,抗干扰能力更强。
