平行跑道建立航迹扩散角位置及高度分析
2023-06-30梁宇丰
梁宇丰

摘要 为明确平行跑道同时仪表运行中建立航迹扩散角的位置和高度,文章通过对平行跑道4种运行模式中关于对离场程序或复飞程序航迹扩散角的要求进行分析,提出4种运行模式下建立航迹扩散角的具体位置和高度,以确保在满足规章规范的前提下,尽早建立相关航迹扩散角,为平行跑道同时仪表运行飞行程序设计提供理论参考。
关键词 平行跑道;同时仪表运行;航迹扩散角
中图分类号 V355文献标识码 A文章编号 2096-8949(2023)11-0005-03
0 引言
近年来,国内航空运输业务持续增加,为应对持续增加的航空业务量需求,全国各地的城市陆续着手现有干线机场的改扩建或新机场的规划建设。在众多改扩建或新机场规划的方案中,机场的跑道数量越来越多,由现有最为常见的2条平行跑道构型发展出了3条、4条等多跑道的构型,可以说国内已掀起多跑道建设的热潮。
无论干线机场的跑道数量是多少,在跑道建设论证过程中均需要对各跑道的运行模式进行分析论证。根据交通运输部于2023年3月23日修订的《平行跑道同时仪表运行管理规定》[1],在不同的平行跑道运行模式下对相邻跑道之间的航迹扩散角均做了明确规定,但是该规定未对航迹扩散角建立的具体位置和高度做详细的说明,该文将从平行跑道运行模式和飞行程序设计方面,对平行跑道建立航迹扩散角的位置和高度进行分析,提出相关方案,供飞行、空管和飞行程序设计人员参考。
1 平行跑道运行模式
根据《平行跑道同时仪表运行管理规定》(以下简称“运行规定”),将平行跑道运行模式分为独立平行仪表进近、相关平行仪表进近、独立平行离场和隔离平行运行4种模式。独立平行仪表进近运行模式,系指2条平行跑道中心线的间距不小于1 035 m,在相邻的平行跑道仪表着陆系统上进近的航空器之间不需要配备规定的雷达间隔的运行模式。相关平行仪表进近模式,指2条平行跑道中心线的间距不小于915 m,在相邻的平行跑道仪表着陆系统上进近的航空器之间需要配备规定的雷达间隔时,在平行跑道上同时进行的仪表着陆系统进近的运行模式。隔离平行运行模式,是指2条平行跑道中心线的间距不小于760 m,在平行跑道上同时进行的运行,其中一条跑道只用于离场,另一条跑道只用于进近。独立平行离场运行模式,是指2条平行跑道中心线的间距不小于760 m,离场航空器在平行跑道上沿相同方向同时起飞的运行模式。
此外,在实施4种运行模式时,除了对平行跑道间距有硬性要求外,运行规定还对监视雷达、仪表着陆系统、最后进近段的障碍物、管制员、非侵入区和PAOAS面[2]等进行了详细的规定。在独立平行仪表进近和相关平行仪表进近中,运行规定要求“一条跑道的复飞航迹与相邻跑道复飞航迹的扩散角不小于30°”;在独立平行离场中,运行规定要求“两条离场航迹在航空器起飛后立即建立不小于15°扩散角”;在隔离平行运行中,运行规定要求“离场航迹应当在起飞后立即与相邻跑道的进近复飞航迹建立不小于30°的扩散角”。运行规定要求的扩散角的建立位置和高度没有明确写出,且独立平行离场和隔离平行运行中均用到了“立即”二字,如何明确“立即”,是该文分析讨论的重点内容。
2 平行跑道建立航迹扩散角位置及高度分析
为便于分析,选取间距1 035 m的平行跑道为例,平行跑道长度均为3 800 m,平行跑道两端均平齐,跑道磁方位090~270°,平行跑道的编号分别为09L/27R和09R/27L,假定平行跑道的四个方向的跑道入口标高为0 m,各跑道方向的精密进近程序均为标准程序,即下滑角3°,HL(Height Loss,高度损失)为49 m,RDH(Reference Datum Height,基准高)为15 m,运行标准DH(Decision Height,决断高)为60 m,复飞程序梯度为标准的2.5%,离场程序梯度为标准的3.3%。
2.1 独立平行离场
根据选取的1 035 m间距的平行跑道,跑道间距符合独立平行离场的要求,能够实施独立平行离场,对该平行跑道进行离场飞行程序设计时需要满足起飞后立即建立不小于15°的扩散角的要求。
根据《航空器运行目视和仪表飞行程序设计规范》[3](以下简称“设计规范”),直线离场允许有不大于15°的转弯,所以在独立平行离场模式下的平行跑道的离场程序均为直线离场。
同时,为确保平行跑道的离场程序之间能够立即建立15°的扩散角,通常情况下在需要15°转弯的跑道的DER(Departure End of the Runway,跑道起飞末端)位置设置转弯定位点,确保航空器不会在DER位置前提前开始转弯而导致后续离场航迹不可预测,最终导致与相邻跑道的航空器无法建立15°的扩散角,该定位点即为建立航迹扩散角的位置标志。如图1所示。
2.2 隔离平行运行
前文设计的独立平行离场程序,09L跑道的离场程序向北偏转15°,则09R跑道的复飞程序应向南偏转15°,以保证09L跑道的离场航迹和09R跑道的复飞航迹建立不小于30°的扩散角;反之,09R跑道的离场程序未偏转,则09L跑道的复飞程序应向北偏转30°,以保证09R跑道的离场航迹和09L跑道的复飞航迹建立不小于30°的扩散角。
根据设计规范,航空器在转弯前应保持跑道方向飞行直至达到跑道之上120 m,即09L跑道的复飞程序在开始30°的转弯前,需要保持跑道方向直线飞行至跑道入口标高之上120 m,根据精密进近程序的复飞程序理论设计参数计算SOC(Start Of Climb,起始爬升)和入口标高之上120 m的位置。如表1所示。
根据理论设计参数计算,入口之上120 m的位置,是建立航迹扩散角的位置,理论上位于距离09L跑道入口5 050 m处。在对复飞程序进行设计时,设计规范对相关转弯参数和计算方法有明确规定,理论设计的转弯位置确实位于跑道末端外,但是这样的理论设计受到设计规范的约束,并且没有优化调整该位置的空间。该转弯位置为理论计算位置,理论计算采用的复飞爬升梯度为2.5%,而在实际运行中,飞行员会采用TO/GA(Take Off/Go-Around,起飞/复飞)挡位使航空器以最大推力开始复飞爬升,此时航空器的实际复飞爬升梯度将远大于理论设计梯度,所以在实际复飞中,航空器将在理论设计的转弯位置之前提前转弯,基本可以在跑道范围以内开始转弯。
值得注意的是,虽然指定120 m为建立航迹扩散角的高度,但是在完成转弯后必须为下一航段指定特定的飞行航迹角度。如果不为下一航段指定航迹,在实际运行中,航空器在跑道范围内已达到120 m的高度,随后开始提前转弯,会导致下一航段与相邻跑道的离场航段之间的航迹扩散角小于30°。如果因为障碍物、空域、导航设施等现实条件,无法仅利用120 m的高度作为建立航迹扩散角的时机,此种情况下可以通过定位点和高度两者相结合的方式,将建立航迹扩散角的位置进行固定,并且为了与实际飞行相匹配,该定位点的高度应设置为120 m及以上。如图2所示。
2.3 独立平行仪表进近和相关平行仪表进近
根据运行规定,上述选取的跑道间距能够满足独立平行仪表进近和相关平行仪表进近的间距要求,所设计的隔离平行运行,09L跑道的复飞程序向北偏转30°,09R跑道的复飞程序向南偏转15°,两条相邻跑道的复飞航迹已能够建立45°的扩散角,满足运行规定的不小于30°扩散角的要求。
2.4 其他条件下的航迹扩散角的建立
2.4.1 大角度转弯
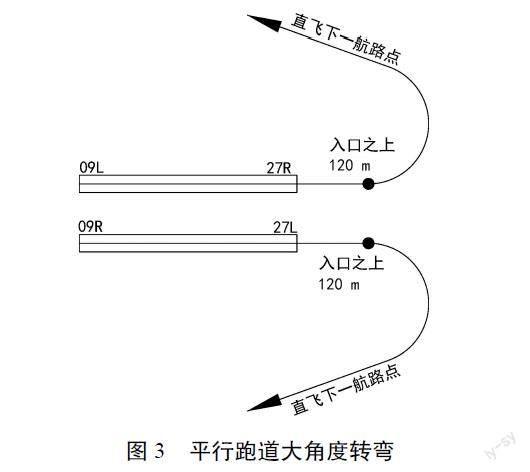
当在机场周边运行条件较好时,如净空、空域环境、管制运行等条件允许下,平行跑道上的航空器在起飞或复飞后能够较快达到120 m的最低转弯高度后,开始各自向跑道两侧以较大角度转弯,转弯的过程中迅速建立航迹扩散角和水平间隔,整个飞行过程均符合平行跑道的4种模式的航迹扩散角的要求。这种大角度转弯的飞行,能够有效提高航空器运行效率,减少跑道和空域的占用,在实际运行中,航空器往往在跑道范围内就开始大角度转弯,即使在跑道末端设置定位点,航空器在实际运行中也能在通过跑道末端的定位点后立即转弯。如图3所示。
2.4.2 平行跑道中某一条跑道受到限制
在实际运行中,机场周边常常受到其他不可控的因素限制,如空域受限、远端净空条件复杂、噪声敏感区、候鸟保护区等,导致平行跑道的某一条跑道的一侧空域受到限制,该跑道的离场程序和复飞程序仅能采用沿跑道方向直线飞行的方式进行设计。在这种受到限制的情况下,首先受到限制的跑道的离场程序和复飞程序设计为直线航迹,其次未受到限制的跑道的离场程序需要设计为偏转30°,并同步设置至少高于跑道120 m的转弯高度,以保证不小于30°的扩散角。同时,未受到限制的跑道的复飞程序也需要设计为偏转30°,并设置至少高于跑道120 m的转弯高度,以满足独立平行仪表进近和相关平行仪表进近要求的不小于30°航迹扩散角。
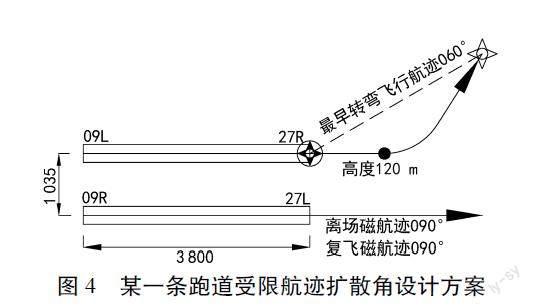
在上述受限条件下,可以为需要偏转30°的跑道設置高于跑道之上至少120 m的转弯高度,再为下一航段指定特定的飞行航迹角度,或者在转弯位置设置定位点并指定飞行高度,这两种方式均可建立航迹偏转角。但是,在离场程序和复飞程序均需要偏转30°的情况下,为了进一步提升离场程序的运行效率,可以采用在离场跑道末端DER位置设置一个定位点,同时为航空器设置高于跑道入口之上至少120 m的转弯高度,转弯后在适当位置设置下一航路点,航空器飞向下一航路点的过程不指定特定的飞行航迹角度。在这种飞行程序设计结果下,航空器首先必须飞至离场跑道末端,按照航空器实际运行时的爬升梯度,最早转弯位置必然在跑道末端定位点位置,只要保证最早转弯位置飞至下一航路点的飞行航迹角度与相邻跑道形成30°航迹扩散角,即可保证整个离场程序与相邻跑道的离场程序和复飞程序能够建立大于等于30°的航迹扩散角。复飞程序也可按此方法进行设计。如图4所示。
2.5 多跑道构型下的航迹扩散角的建立
目前平行跑道运行的规范性文件《平行跑道同时仪表运行管理规定》,对2条平行跑道的运行进行了详细规定。在目前国内多跑道建设的热潮背景下,多跑道构型已成为未来干线机场发展的趋势,但是对于多跑道同时仪表运行,暂无相关规章规范可参考。目前普遍的做法是将多跑道构型拆分为多组两条平行跑道的组合进行分析,同时各组跑道之间的运行又互相影响,如果多跑道之间还存在不同跑道间距,还要按组分别对4种运行模式逐项分析,可以说多跑道构型下的运行模式和飞行程序设计复杂多变,国内已有学者对多条平行跑道构型的运行模式和飞行程序设计[4]进行了分析。虽然多跑道构型下的运行模式复杂多变,但是多跑道运行参考的依据依然是《平行跑道同时仪表运行管理规定》。对多跑道构型的分析依然是拆分为多种2条平行跑道的组合,所以前述提到的建立航迹扩散角的位置和高度的方法依然适用于多跑道构型,只是多跑道相对于平行2条跑道,航迹扩散角的建立的情况更多、更复杂,更需要统筹考虑。
3 结语
该文通过对平行跑道按照独立平行离场、隔离平行运行、独立平行仪表进近和相关平行仪表进近的顺序逐项进行分析,对各运行模式建立航迹偏转角的位置和高度进行详细说明,在设计过程中可使用为航空器指定高于跑道120 m的转弯高度作为建立航迹偏转角的时机,或使用定位点和转弯高度相结合的方式,并且为了提高运行效率,还可利用跑道末端定位点,确保航空器最早转弯航迹与相邻跑道建立规定的航迹偏转角的方法。在平行跑道或多跑道设计过程中,可根据机场实际条件选取合适的建立航迹偏转角的方法,确保平行跑道同时仪表运行的安全和高效。
参考文献
[1]中国民用航空局. 平行跑道同时仪表运行管理规定: CCAR-98TM-R1[S]. 2023.
[2]刘津宇. 基于独立平行进近运行模式的障碍物评估[J]. 民航学报, 2019(6): 19-22.
[3]中国民用航空局. 航空器运行目视和仪表飞行程序设计规范: AC-97-FS-005R1[S]. 2021.
[4]刘冰. 多条平行跑道构型的运行模式和飞行程序设计分析[J]. 中国民航飞行学院学报, 2020(2): 10-14.
