非匹配包线下无人机空基回收拖曳系统协调运动规划
2023-06-27苏子康陈海通李春涛邢卓琳王宏伦
苏子康,陈海通,李春涛,,邢卓琳,王宏伦
1.南京航空航天大学 自动化学院,南京 210016
2.北京航空航天大学 自动化科学与电气工程学院,北京 100191
近年来,在降低无人机作战成本和提升无人机(Unmanned Aerial Vehicle, UAV)作战效能的需求推动下,如何实现无可靠陆基/舰基着陆条件时小型固定翼无人机的快速、高效、远程回收已逐渐成为各航空大国研究的热点[1]。其中,以大型运输机(以下简称“母机”)为运载/存储平台在空中对小型无人机进行回收的空基回收技术为此类研究提供了创新思路[2-4]。然而,目前以“小精灵”为代表的空基回收技术均要求母机和无人机飞行包线相匹配[5],难以完成与母机飞行包线不匹配的小型低速无人机的空中回收,存在明显的局限性。所以,如何实现非匹配包线下无人机的空基回收,已然成为制约低成本、重复使用无人机空战发展的瓶颈技术之一,具有迫切的军事需求。
为解决上述难题,盘旋拖曳式无人机空基回收技术愈发受到关注[6]。该技术采用母机在“更高、更快”的大盘旋轨道牵连柔性缆绳拖曳着浮标在“更低、更慢”的小拖曳轨道运动,从而匹配双机飞行包线,完成空中对接回收。
实现非匹配包线下无人机空中对接回收的前提在于引导待回收无人机完成其所配的对接插头与拖曳浮标快速、高效、准确地对接。但是,由于浮标被柔性缆绳盘旋拖曳,致使其极易受气流扰动影响而偏离期望位置,造成高速飞行的小型无人机难以准确跟踪动态飘摆的拖曳浮标,从而显著增加待回收无人机与拖曳浮标空中对接的难度[7]。因此,为提升拖曳浮标与待回收无人机对接的精度和效率,需控制拖曳浮标相对精确地稳定于拖曳轨道。然而,盘旋拖曳式无人机空基回收作为一种新兴技术,已公开的研究及文献相对较少。为此,本文将从与之类似的拖曳靶标、软式空中加油、拖曳飞行器等空中拖曳系统的拖曳体轨迹控制相关方面研究进行综合分析。
目前,拖曳体轨迹控制策略主要分为主动控制与被动控制两类[3]。其中,主动控制采用调节拖曳体所配气动控制面的方式控制运动轨迹。在此方面,文献[8]在构建拖曳飞行器六自由度模型的基础上设计了基于线性二次型调节器(Linear Quadratic Regulator, LQR)的轨迹控制器,通过控制拖曳飞行器所配气动舵面实现了其在扰动情况下的位置稳定。文献[9]针对软式空中加油过程中软管-锥套受大气紊流、母机尾涡以及受油机头波扰流作用时的飘摆问题,采用线性化软管-锥套模型设计了锥套轨迹PID控制器,有效地减弱了锥套的飘摆运动。文献[10]则围绕复杂扰流和瞬态缆绳拉力等多重干扰下的拖曳浮标位置稳定问题展开研究。通过观测器重构系统不可测集总扰动并在控制设计中进行前馈补偿的方法,提高了拖曳浮标的抗扰性。诚然,此类方法由于直接控制浮标所配气动控制面可实现浮标快速、精确、高抗扰地轨迹控制。但是,由于小型拖曳浮标所配气动面对浮标轨迹控制能力的有限,使得主动控制方法难以满足较长缆绳盘旋拖曳浮标的轨迹稳定要求[11]。
相比之下,被动控制通过调节缆绳长度或规划母机运动轨迹的方式间接地控制拖曳浮标运动,具有更灵活的操纵范围和更大的控制自由度。Williams等[12]采用最优控制方法优化直线飞行母机牵连缆绳的收放加速度,从而通过改变缆绳长度的方式实现了气流扰动下拖曳飞行器对高度起伏变化的地形的准确跟踪。文献[13]为避免平静大气下拖曳系统从直线飞行到盘旋飞行的过渡过程中缆绳发生松弛,以拖曳飞行器实际高度与期望高度的偏差为反馈实时控制缆绳收放加速度。Sun和Beard[14]围绕气流扰动下盘旋拖曳浮标的高度偏移问题,设计了母机高度和缆绳长度PI控制器,指出单独改变母机高度或缆绳长度均可在一定程度上改善浮标高度偏移问题。在该问题上,Williams[11]则在构建拖曳浮标轨迹跟踪最优控制模型的基础上,通过恒定高度下缆绳收放控制和恒定缆绳长度下母机高度控制2种方式实现对拖曳浮标高度的控制。而针对盘旋拖曳浮标三维轨迹被动控制问题,文献[6]采用微分平坦理论对母机的运动轨迹进行规划,可实现常值风扰下拖曳浮标对预设恒定高度和半径圆形轨道的精确跟踪,但由于并未考虑母机飞行性能的约束,其生成轨迹的有效性有待进一步研究。Sun等[15]则在考虑母机空速、航向角速率以及航迹倾斜角等母机飞行物理能力限制的情况下,采用模型预测控制(Model Predictive Control, MPC)方法规划母机运动轨迹,实现了不同气流扰动下对浮标轨迹的控制,但在风场强度较大时,容易出现控制量饱和等问题。
上述研究成果表明采用最优控制方法可综合考虑系统性能约束,从而在保障安全的前提下实现拖曳浮标的被动控制[11-13,15]。但由于复杂的非线性动力学模型及多种系统约束导致所建最优控制模型通常难以求解。针对此问题,当前常采用数值解法,通过不同的离散方法将连续时间的最优控制问题转化为参数优化问题后经各式参数优化算法求解[16]。其中,伪谱法因使用少量配点即可实现较高的转换精度并获得全局时间最优解,已广泛应用于飞行器轨迹规划领域[17-22]。根据选择离散配点方式的不同,伪谱法主要有Legendre伪谱法、Gauss伪谱法以及Radau伪谱法,其中Radau伪谱法在求解非线性最优控制问题时具有收敛性好、求解速度快、离散精度高的特点[22-23]。此外,为避免传统伪谱法难以处理状态变量或控制变量震荡的问题,文献[24]提出hp自适应Radau伪谱法(hp adaptive Radau Pseudospectral Method,hp-RPM),根据轨迹震荡的程度调整划分时域的数量和各分段时域内的配点数,从而加快求解问题的收敛速度。
需要强调的是,采用最优控制方法规划母机轨迹进而间接控制浮标轨迹的方法属于开环控制,但通过拖曳系统协调运动规划构建期望拖曳轨道和与之对应的稳定拖曳状态,对于指导实现气流扰动下更精准的浮标拖曳轨道主动稳定控制和母机盘旋轨道跟踪控制至关重要。而以最优拖曳和盘旋轨道为跟踪目标的浮标稳定和母机盘旋控制问题实际为典型的飞行器三维轨迹跟踪问题,一般可采用追踪法或视线导引法建立飞行器与预设航迹的偏差,并通过非线性动态逆[25]、状态反馈控制[26]等方法实现对预设轨道的精确跟踪,进而,从运动规划间接控制和拖曳轨道跟踪直接控制两方面,全面提升拖曳浮标稳定盘旋控制精准。
围绕盘旋柔性缆绳-浮标组合体易扰不稳定的问题,本文重点针对拖曳系统运动规划中的以下技术难点展开研究:①气流扰动和系统约束下基于母机运动和缆绳收放协调的拖曳系统运动规划建模;②多约束复杂非线性最优控制模型解算。首先,构建考虑缆绳弹性和收放特性的母机-缆绳-浮标盘旋拖曳系统的动力学模型。继而,为控制拖曳浮标稳定于期望拖曳轨道上,综合考虑母机多种性能约束,构建了基于母机运动的盘旋拖曳系统运动规划最优控制模型。随后,在上述模型的基础上额外引入缆绳收放控制和缆绳收放物理约束,通过实时协调母机运动和缆绳收放2种浮标被动控制方式克服传统单一规划母机运动在控制自由度和效率上的局限性,增加了缆绳收放额外控制自由度,从而提高了拖曳浮标被动控制的灵活性和高效性。然后,为求解上述所建复杂多约束优化模型,采用hp-RPM将其转化为离散的非线性规划问题,并使用SNOPT求解器进行解算。最后,通过平静大气下母机运动规划、常值风扰下母机运动规划和常值风扰下母机运动-缆绳收放协调运动规划3种典型场景下的数值仿真,并分析浮标跟踪偏差、母机性能约束、以及输入控制量等指标验证所提方法的有效性。
1 非匹配包线下无人机回收系统建模
1.1 模型描述及坐标系建立
非匹配包线下无人机拖曳式空基回收系统主要由母机、缆绳以及浮标3部分组成。如图1所示,母机以较快的速度V0在较高高度H0和较大半径R0的盘旋轨道飞行,使得所牵引缆绳末端拖曳的浮标可在较低高度Hdr和较小半径Rdr的拖曳轨道以较慢的速度Vdr飞行,从而为待回收的无人机提供飞行包线相匹配的可对接目标。

图1 非匹配包线无人机回收系统Fig.1 Aerial recovery system of UAV with unmatched envelope
本文取地面某一点为坐标原点,以垂直指向地面方向为Z轴正方向,根据右手法则构建惯性坐标系OgXgYgZg。
1.2 母机-缆绳-浮标组合体动力学模型
1.2.1 母机运动方程
鉴于本文重点研究母机运动和缆绳收放协同控制浮标轨迹的可行性,为方便计算,假设拖曳缆绳-浮标组合体对大型母机运动牵连可忽略不计,建立简化后的母机质心运动学方程为[15]
式中:P0=[p0X,p0Y,p0Z]T为母机在惯性坐标系下的位置矢量,其中p0j(j=X,Y,Z)分别为各个方向的位置分量;V0=[V0X,V0Y,V0Z]T和V0分别为母机在惯性坐标系下的速度矢量和大小,其中V0j(j=X,Y,Z)分别为各个方向的速度分量;γ和ψ分别为母机的航迹倾斜角和航向角;a0=[a0X,a0Y,a0Z]T为母机在惯性坐标系下的加速度矢量,其中a0j(j=X,Y,Z)分别为各个方向的加速度分量。
1.2.2 缆绳动力学方程
为完整描述柔性缆绳的运动特性,本文将缆绳分为N段等长且质量、密度均匀分布的离散质点-弹簧单元[27],相邻单元间由各自两端可视为质点的无摩擦球轴节点连接,每段质量及其载荷均集中于节点处,浮标假设固连于缆绳末端。同时,在缆绳收放控制时,各分段缆绳同步变化且收放长度相同[28]。基于上述处理后,记惯性系下第i个缆绳节点的位置为Pi=[piX,piY,piZ]T,pij(i=1,2,…,N;j=X,Y,Z)分别为各个方向的位置分量,浮标节点位置为PN。由于缆绳节点Pi受到第i段缆绳重力、第i段和第i+1段缆绳的气动力以及缆绳拉力的作用(如图2所示),因此通过牛顿第二定律可得各缆绳节点的动力学方程为[11]

图2 缆绳节点受力情况Fig.2 Forces on joint
式中:mi是第i段缆绳的质量是第i个缆绳节点的加速度,p̈ij(j=X,Y,Z)分别为各个方向的加速度分量;Ti、Gi和Fai分别是第i段缆绳所受拉力、重力以及气动力矢量。
图2中,缆绳各段所受拉力、重力以及气动力具体求解如下所示:
1)缆绳拉力
在质点-弹簧模型中,缆绳节点Pi所受拉力来源于相邻缆绳分段的弹性形变[29]。记缆绳初始总长度为l0,缆绳收放的总长度为lc,分段缆绳未拉伸变形时的初始长度L0=(l0+lc)/N,则由胡克定律可得第i段缆绳变形所产生的拉力矢量为
式中:E是缆绳弹性模量;A是缆绳横截面积;li=Pi-1-Pi是缆绳分段位置矢量。
2)重力
记缆绳密度为ρl,重力加速度方向矢量为eg=[0,0,1]T,重力加速度大小为g,则第i段缆绳所受重力可表示为
3)气动力
第i段缆绳所受气动力Fai可分为平行于缆绳分段的气动阻力Di和垂直于缆绳分段的气动升力Li,并可分别由式(6)和式(7)求解[27]:
式中:ρi为第i段缆绳所处高度的空气密度;CDi和CLi分别为缆绳分段的气动阻力系数和气动升力系数;vai为第i段缆绳周围空速矢量。
记惯性坐标系下的风速矢量为Vw=[VwX,VwY,VwZ]T,vwj(j=X,Y,Z)分别为各个方向的位置分量为缆绳节点i的速度矢量分别为各个方向的速度分量,则第i段缆绳周围空速矢量可表示为
1.2.3 浮标动力学方程
由于本文视浮标为连接在缆绳末端的质点,因此浮标节点PN受到第N段缆绳的重力、拉力、一半的气动力以及浮标自身重力和气动力的作用[7],根据牛顿第二定律可得浮标的动力学方程为
式中:mdr为浮标的质量;Gdr为浮标所受重力为浮标自身所受气动力矢量。
根据文献[7],浮标所受气动力包括气动阻力和气动升力可分别用式(10)和式(11)表示:
式中:CDdr和CLdr分别为浮标的气动阻力系数和气动升力系数;Sdr为浮标的气动面积;Vdar=Vdr-Vw为浮标空速矢量,Vw为浮标周围气流扰动风速矢量。
2 无人机空基回收拖曳系统运动规划
2.1 拖曳浮标直线飞行转盘旋飞行
非匹配包线下无人机回收系统运动过程主要包括3个阶段:①直线飞行;②过渡飞行;③稳定盘旋飞行。针对浮标从直线飞行过渡到稳定盘旋飞行的问题,可通过规划母机在恒定高度水平面内的运动轨迹从而间接控制浮标完成直线飞行转盘旋飞行的任务[13]。为此,如图3所示,假设母机在以惯性坐标系原点Og为中心且高度为Hs0的平面内运动,从而分别设计母机直线飞行、过渡飞行以及稳定盘旋飞行轨迹为

图3 母机直线飞行转盘旋飞行航迹Fig.3 Flight path of mothership for transition from straight flight into circular flight
式中:ts、tc和te分别表示母机直线飞行结束时刻、过渡飞行结束时刻以及盘旋飞行结束时刻;w=Vs0/Ms=Ve0/Me为母机盘旋角速度,Vs0和Ve0分别表示母机过渡飞行开始时的速度和结束时的速度;Ms和Me分别表示母机过渡飞行开始半径和结束时半径;M为母机过渡飞行时半径。
其中,母机过渡飞行半径M可用如式(15)的多项式表示:
式中:ak(k=1,2,…,5)为母机过渡飞行半径多项式的参数。
同时,考虑到过渡开始与结束时的约束为
结合式(15)~式(17)可得母机过渡飞行时半径为
2.2 基于母机运动的盘旋拖曳系统
为匹配拖曳浮标与待回收无人机的飞行包线,需控制拖曳浮标盘旋在预设的拖曳轨道上。鉴于浮标通过柔性缆绳与母机相牵连,使得母机的运动会间接地改变浮标的运动轨迹,故可通过规划母机运动轨迹的方式控制浮标沿着预定的拖曳轨道运动。
假设拖曳轨道是以惯性坐标系原点Og为中心,高度为H*dr且半径为R*dr的圆形轨迹。浮标初始位置与Xg轴正方向的夹角为ψsdr,并以恒定地速V*dr沿着拖曳轨道运动(如图4),则任意t时刻浮标在惯性系下的期望位置为

图4 风扰下浮标轨迹跟踪示意图Fig.4 Drogue trajectory tracking in wind
基于上述期望轨迹,以母机的三轴加速度为系统控制量构建拖曳系统在一个盘旋周期内的浮标轨迹跟踪最优控制模型,详细如下所示:
1)目标函数
为使得拖曳浮标更好地跟踪预设拖曳轨道,即拖曳浮标在一个盘旋周期内与预设拖曳轨道的距离偏差总和最小,基于平方误差设计拖曳浮标轨迹跟踪的目标函数表示为
式中:t0和tf分别表示拖曳系统盘旋初始时刻和终止时刻;Q为拖曳浮标轨迹跟踪偏差系数矩阵,并记浮标三维轨迹跟踪偏差PN-P*N=[eX,eY,eZ]T。
同时,考虑系统能量消耗最小且母机加速度控制量变化平滑,设计如下母机加速度控制目标函数:
式中:R为母机加速度控制量系数矩阵。
综合考虑母机机动能量消耗和拖曳浮标轨迹跟踪偏差,设计基于母机运动的盘旋拖曳系统运动规划目标函数为:
2)边界条件约束
为使得拖曳系统在盘旋一个周期后可回到起始状态位置,故设置系统终止时的时间、位置和速度约束为
式中:Pi(t0)=[piX(t0),piY(t0),piZ(t0)]T表示初始时刻缆绳节点i的位置表示初始时刻缆绳节点i的速度;Pi(tf)=[piX(tf),piY(tf),piZ(tf)]T表示终止时刻缆绳节点i的位置表示终止时刻缆绳节点i的速度。
3)路径约束
路径约束是指运动过程中系统需要满足的各种约束条件,主要包括母机、缆绳节点以及浮标的位置和速度约束:
此外,为保障最优控制模型规划出的母机轨迹的可跟踪性,还需考虑母机本身控制量(加速度)a0=[a0X,a0Y,a0Z]T、空速大小V0、航向角速率ψ̇和航迹倾斜角γ的约束[15]:
2.3 基于母机运动-缆绳收放协调的盘旋拖曳系统
鉴于母机运动规划在间接控制浮标拖曳轨道上面临操控自由度少、规划效率低、控制易饱和的问题,受缆绳收放控制浮标轨迹的启发[11],本节增加了缆绳收放额外控制自由度,通过实时协调母机运动和缆绳收放的方式提高对拖曳浮标的控制能力。
考虑到缆绳收放装置的物理性能限制,为合理实现母机运动-缆绳收放协调运动下拖曳浮标对预设拖曳轨道的精确跟踪,本节在2.2节所建基于母机运动规划的拖曳浮标轨迹跟踪最优控制模型的基础上,额外考虑追加拖曳系统在一个盘旋周期内缆绳收放长度、速度的边界约束和路径约束以及缆绳收放加速度的路径约束。此外,为对缆绳收放加速度进行控制,在目标函数中增加缆绳收放加速度。目标函数和相关约束分别如下所示:
1)目标函数
母机运动和缆绳收放协调运动规划的目的是在浮标跟踪预设拖曳轨道的同时盘旋拖曳系统的状态量与控制量平稳地变化,为此可设计所需的目标函数如下所示[12]:
式中:S为缆绳收放加速度权重系数;浮标实际位置矢量PN与期望位置矢量P*N的平方差项表示浮标对预设拖曳轨道的跟踪偏差程度,并通过设置拖曳浮标轨迹跟踪偏差系数矩阵Q从而调节浮标在各方向与预设拖曳轨道的跟踪误差;母机加速度矢量a0的平方表示母机运动时的能量消耗,并通过调节母机加速度控制量系数矩阵R使得母机加速度变化平稳;缆绳收放加速度l̈c的平方表示缆绳收放控制所消耗的能量,并通过调节缆绳收放加速度控制系数S使得缆绳收放过程变化平滑。
2)边界条件约束
考虑初始时刻无缆绳收放作用,且拖曳系统在盘旋一个周期后回到初始位置,故设初始时刻和终点时刻的缆绳收放长度和速度为
式中:lc(t0)和lc(tf)分别表示初始和终点时刻的缆绳收放长度和分别表示初始和终点时刻的缆绳收放速度。
3)路径约束
考虑到缆绳卷曲收放装置的物理性能限制,设定母机运动-缆绳收放协调运动过程中缆绳收放长度lc、速度l̇c以及加速度l̈c约束:
式中:lLc和lUc分别表示缆绳收放长度的下限和上限;̇和分别表示缆绳收放速度的下限和上限和分别表示缆绳收放加速度的下限和上限。
2.4 无人机回收系统运动规划的最优控制
本文采用hp-RPM[17-19,24]将所建最优控制问题转化为离散的非线性规划问题,并经SNOPT求解器解算,主要计算流程如图5所示。

图5 hp-RPM求解运动规划最优控制Fig.5 Motion planning optimal control problem solved by hp-RPM
首先,对连续时间区间进行归一化处理从而将时间变量转化为配点变量。其次,通过求解Legendre多项式的零点获取LGR(Legendre-Gauss-Radau)配点。在此基础上,在已有配点处采用拉格朗日多项式得到近似的离散控制变量与状态变量。随后,通过离散的控制变量和状态变量离散路径约束,并采用高斯积分离散目标函数,从而将所建立的拖曳系统运动规划问题转换为拖曳系统非线性规划问题。最终,采用SNOPT求解器求解上述非线性规划问题,并在计算出的状态变量和控制变量精度不满足要求时,通过增加分段数或增加配点数的方式提高计算精度和收敛速度。
需要特别说明的是,针对以最优拖曳和盘旋轨道为跟踪目标的浮标稳定和母机盘旋控制问题实际为典型的飞行器三维轨迹跟踪问题,一般可采用追踪法或视线导引法建立飞行器与预设航迹的偏差,并通过非线性动态逆[25]、状态反馈控制[26]等方法实现对预设轨道的精确跟踪。本文受限于篇幅限制,不再赘述。
3 仿真结果与分析
本章假设期望拖曳浮标在高度=1 568.0 m且半径=388.1 m的圆形拖曳轨道以恒定地速=29.1 m/s做圆周运动。在此基础上,采用表1[7,29]中的缆绳和拖曳浮标参数,研究不同缆绳分段数对浮标盘旋半径、速度以及飞行轨迹的影响。随后,兼顾计算效率与精度,选取合适的缆绳分段数,同时综合考虑表2[13,15]所示母机飞行性能和缆绳收放约束,分别对平静大气下母机运动规划、常值风扰下母机运动规划和常值风扰下母机运动-缆绳收放协调运动规划3种场景进行数字仿真,从而验证所提方法的可行性。

表1 缆绳和拖曳浮标仿真参数[7,29]Table 1 Parameters of cable and towed drogue[7,29]
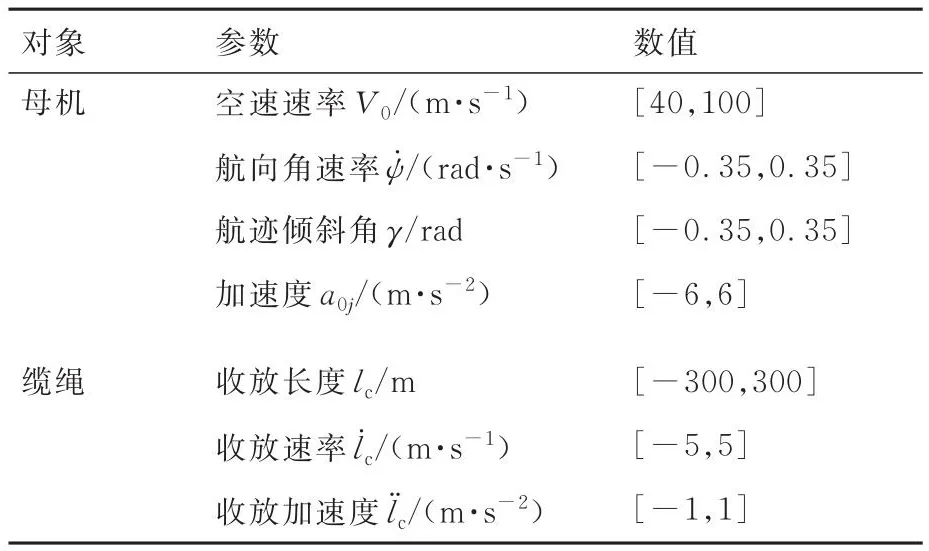
表2 母机和缆绳的物理性能限制[13,15]Table 2 Constraints of mothership and cable[13,15]
3.1 不同缆绳分段下浮标状态
为获取相对可靠的仿真结果,需确定仿真所需缆绳分段数。因此,本小节在平静大气下采用表1所示的缆绳和拖曳浮标参数,研究母机以恒定速度V0=60 m/s沿着高度H0=2 000 m且半径R0=800 m的盘旋轨道飞行时不同缆绳分段数对浮标状态的影响,仿真实验结果如图6和图7所示。

图6 不同缆绳分段下浮标盘旋轨迹Fig.6 Hovering drogue trajectory with different cable segments

图7 不同缆绳分段下浮标盘旋半径与速度Fig.7 Radius and speed of hovering drogue with different segments
由图6和图7可知,随着缆绳分段数的增加,浮标稳定盘旋时的半径与飞行速度逐渐收敛,拖曳系统模型的精度逐渐提高。然而,同时递增的拖曳系统状态变量为所建立浮标轨迹跟踪最优控制模型的解算带来困难。鉴于本文主要研究规划母机运动轨迹从而控制浮标跟踪预设浮标轨道,综合考虑模型精度与求解速度[15],选取缆绳分段数N=3用于后续仿真实验。
3.2 拖曳浮标直线飞行转盘旋飞行仿真
在不考虑气流扰动作用的情况下,采用表1和表3中的参数进行拖曳浮标直线飞行转盘旋飞行仿真实验,实验结果如图8所示。由图8可以看出,在母机直线飞行时,浮标同样保持直线飞行状态。在母机过渡飞行时,浮标的高度逐渐下降且盘旋半径逐渐减小。最后,在母机稳定盘旋后,浮标的高度和盘旋轨迹逐渐稳定。

表3 浮标直线飞行转盘旋飞行仿真参数Table 3 Parameters for drogue transition into circular flight
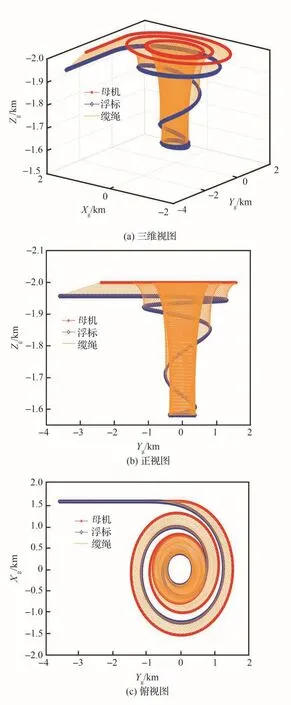
图8 浮标直线飞行转盘旋飞行时拖曳系统轨迹Fig.8 Trajectory of towed cable system during drogue transition into circular flight
3.3 平静大气下母机运动规划
在不考虑气流扰动作用的情况下(Vw=[0,0,0]T),设置基于母机运动的盘旋拖曳系统运动规划目标函数中拖曳浮标三维轨迹跟踪偏差系数矩阵Q=diag(1,1,1),母机加速度系数矩阵R=diag(5,5,5)。在此基础上,采用表4中的拖曳系统初始状态进行母机运动规划仿真实验。

表4 平静大气下母机运动规划仿真初始状态Table 4 Initial states for mothership motion planning in quiet atmosphere
基于表4参数进行仿真实验可得,所设基于母机运动的盘旋拖曳系统运动规划目标函数最小值为J=8 481.6,相应拖曳系统在一个盘旋周期内的轨迹、浮标轨迹跟踪偏差、母机控制量以及性能约束的详细信息分别如图9~图12所示。
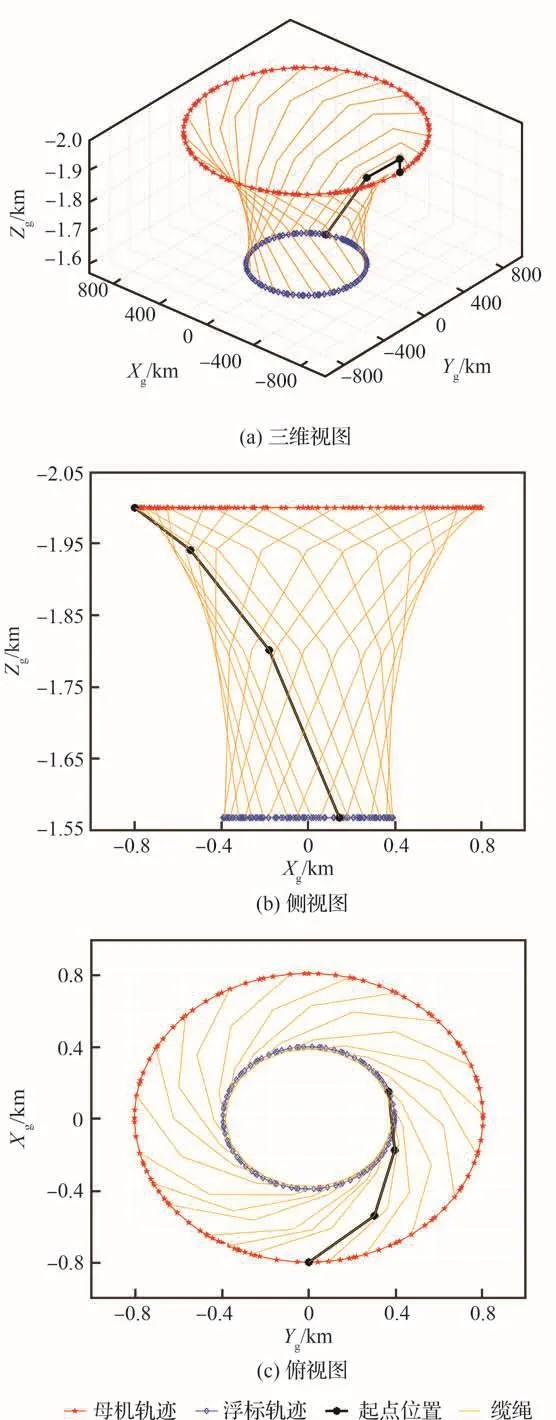
图9 平静大气下盘旋拖曳系统轨迹Fig.9 Trajectory of circularly towed cable system in quiet atmosphere
图9展示了母机-缆绳-浮标拖曳系统的运动轨迹,红色为母机的运动轨迹,蓝色为浮标的运动轨迹。从图9(b)和图9(c)可看出在无气流扰动时母机做定高盘旋运动。进一步结合图10可以看出在一个盘旋周期内,浮标与期望轨迹在Xg轴与Yg轴方向的跟踪偏差均在0.2 m以内,Zg轴方向的跟踪偏差小于0.02 m,表明可通过母机运动间接控制浮标较好地跟踪预设的拖曳轨道。

图10 平静大气下浮标轨迹跟踪误差Fig.10 Drogue trajectory tracking errors in quiet atmosphere
同时,通过分析图11和图12可以看出在严格满足母机空速速率、航向角速率以及航迹倾斜角飞行性能约束的前提下,母机拖曳浮标精确跟踪预设拖曳轨道的过程中三轴加速度在所设约束范围内平滑变化,证明所规划出母机轨迹的有效性。此外,在图12中母机的空速和航向角速率恒定不变,且母机的航迹倾斜角恒为0 rad,印证了图9所示母机在平静大气下做定速、定高的盘旋运动。
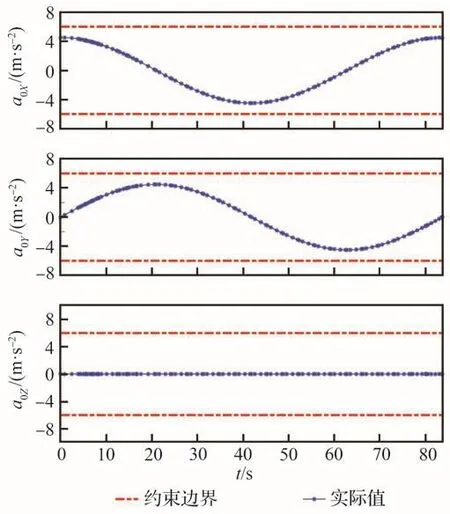
图11 平静大气下母机加速度Fig.11 Acceleration of mothership in quiet atmosphere

图12 平静大气下母机性能约束Fig.12 Constraint performance of mothership in quiet atmosphere
3.4 常值风扰下母机运动规划
考虑常值风气流扰动作用,沿Yg轴正方向施加风速为5 m/s的常值风(vw=[0,5,0]T)。设置基于母机运动的盘旋拖曳系统运动规划目标函数中拖曳浮标三维轨迹跟踪偏差系数矩阵Q=diag(1,1,1),母机加速度系数矩阵R=diag(5,5,5)。在此基础上,采用表5中的拖曳系统初始状态进行母机运动规划仿真实验。
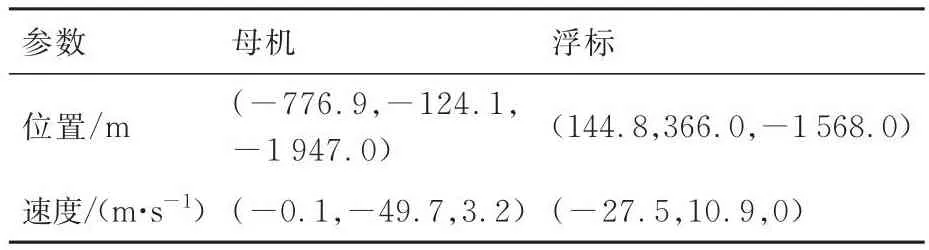
表5 5 m/s常值风下母机运动规划仿真初始状态Table 5 Initial states for mothership motion planning inpresence of 5 m/s wind
基于上述参数进行仿真实验可得,所设基于母机运动的盘旋拖曳系统运动规划目标函数最小值为J=9 403.8,相应5 m/s常值风气流扰动场景下拖曳系统在一个盘旋周期内的轨迹、浮标轨迹跟踪偏差、母机控制量以及性能约束的详细信息分别如图13~图16所示。

图13 5 m/s常值风扰下盘旋拖曳系统轨迹Fig.13 Trajectory of circularly towed cable system under 5 m/s wind
图13为常值风扰动下母机-缆绳-浮标拖曳系统的运动轨迹图。对比图9和图13可以看出,为实现常值风气流扰动下拖曳浮标对预设拖曳轨道的跟踪,母机的盘旋轨迹在垂直方向发生倾斜变为椭圆形。而在水平方向,母机的盘旋轨迹沿着与气流扰动相反的方向偏移(Yg轴负方向)。进一步结合图14所示浮标轨迹跟踪误差可看出气流扰动对浮标轨迹的影响。由于受到气流扰动的作用,在初始时刻浮标轨迹跟踪偏差较大,随后浮标在Xg轴与Yg轴方向的跟踪偏差逐渐缩小在1 m内,Zg轴方向的偏差减小到0.5 m以内。

图14 5 m/s常值风扰下浮标轨迹跟踪误差Fig.14 Drogue trajectory tracking errors under 5 m/s wind
图15则展示了母机三轴加速度随时间的变化。由于气流扰动的作用,在初始时刻20 s内母机三轴加速度存在局部波动,但随后逐渐平稳变化。此外,在36~48 s内的一段时间母机Xg轴方向的加速度达到约束边界。

图15 5 m/s常值风扰下母机加速度Fig.15 Accelerations of mothership under 5 m/s wind
图16为母机性能约束随时间变化图。图16中母机的空速速率、航向角速率以及航迹倾斜角3种性能约束均在预设约束范围以内。通过分析母机的空速速率和航迹倾斜角可知,为抵抗气流扰动对浮标的影响,母机的速度和高度需相应改变。
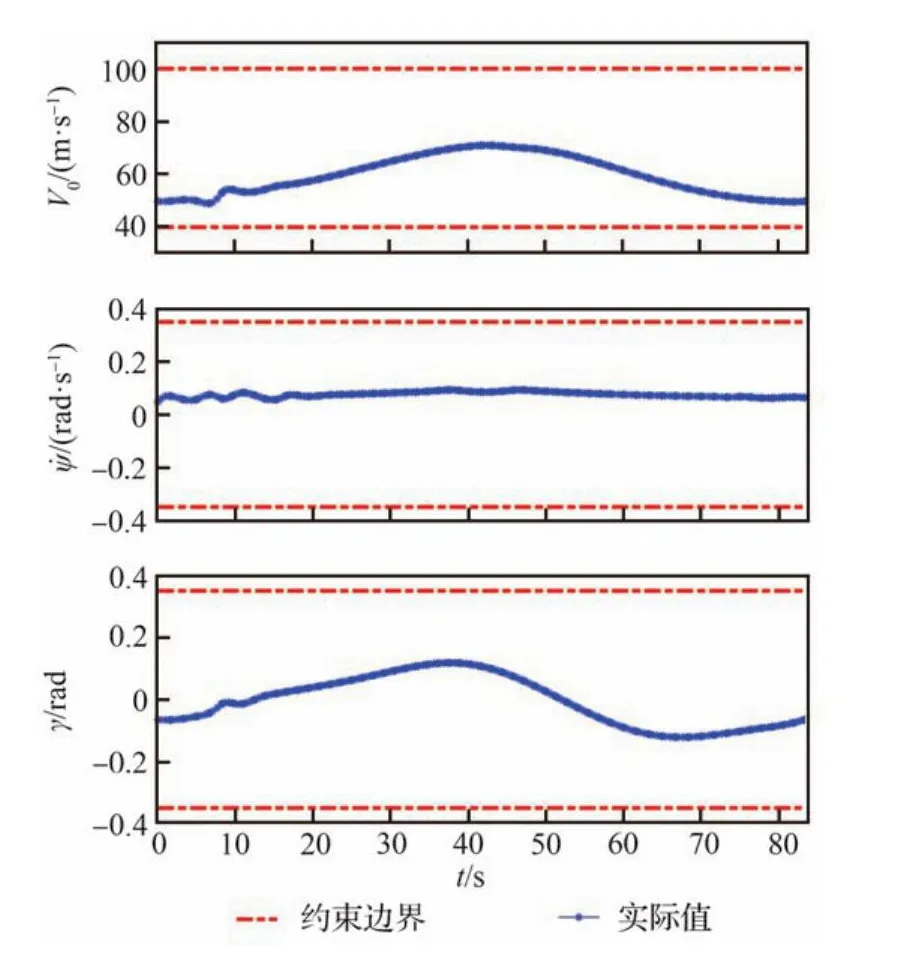
图16 5 m/s常值风扰下母机性能约束Fig.16 Constraint performance of mothership under 5 m/s wind
3.5 常值风下母机运动-缆绳收放协调运动规划
为验证母机运动-缆绳收放协调运动规划的可行性,在3.4节常值风扰下母机运动规划的基础上,进一步增加目标函数中缆绳收放加速度权重系数S=100,并采用表5中的拖曳系统初始状态进行仿真实验。
在上述参数设置下经仿真实验可得所设母机-缆绳收放协调运动规划的目标函数最小值为J=9 056.8,相应5 m/s常值风气流扰动场景下拖曳系统在一个盘旋周期内的轨迹、浮标轨迹跟踪偏差、母机控制量以及性能约束的详细信息分别如图17~图21所示。

图17 5 m/s常值风下协调运动规划的盘旋拖曳系统轨迹Fig.17 Trajectory of circularly towed cable system for coordinating motion planning under 5 m/s wind
图17展示了母机-缆绳-浮标拖曳系统的三维轨迹,与图13单一母机运动规划下拖曳系统的三维轨迹图相比,为使得拖曳浮标跟踪预设的拖曳轨道,母机的拖曳轨道同样倾斜为椭圆形,但由于缆绳收放的加入,母机盘旋的最高高度有所降低。
图18则给出了协调运动规划时浮标轨迹跟踪误差。通过对比图14和图18可看出,虽然加入缆绳收放控制后浮标对期望轨迹的跟踪存在一定的偏差,但水平方向跟踪偏差范围均在1 m以内,且Zg轴方向的偏差逐渐在30 s后减小到0.2 m以内。

图18 5 m/s常值风下协调运动规划时浮标轨迹跟踪误差Fig.18 Drogue trajectory tracking errors for coordinating motion planning under 5 m/s wind
图19为母机的三轴加速度随时间变化图。在初始20 s内,由于气流扰动的作用,母机的三轴加速度存在局部的波动,但随后逐渐稳定。相比于图15,可以看出母机的三轴加速度均在约束范围以内,证明通过加入缆绳卷曲收放的方式可解决单一母机运动时控制饱和问题。进一步结合图20可以看出,母机的空速速率、航向角速率以及航迹倾斜角三个性能约束状态也在预设的约束范围以内,说明优化轨迹的可行性。
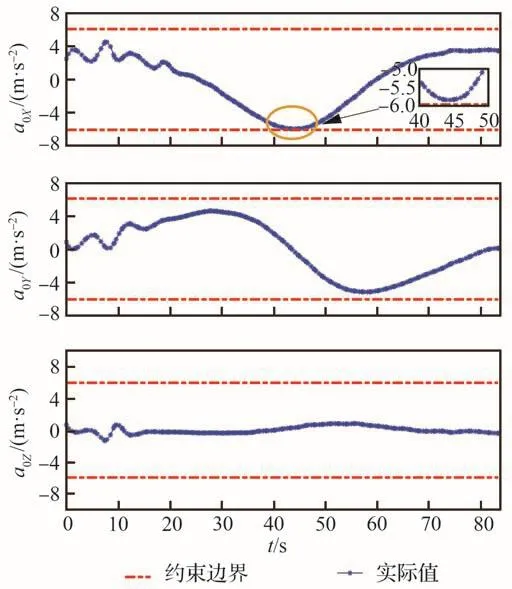
图19 5 m/s常值风下协调运动规划时母机加速度Fig.19 Acceleration of mothership for coordinating motion planning under 5 m/s wind
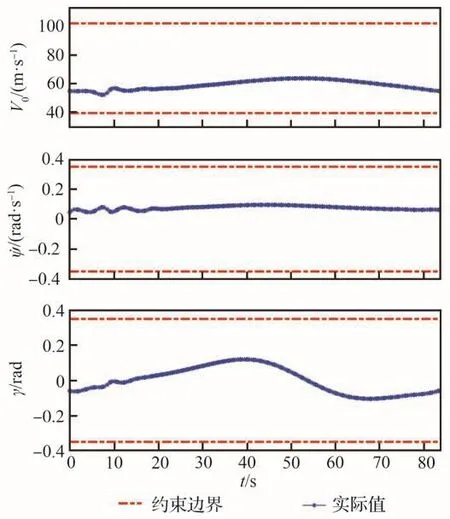
图20 5 m/s常值风下协调运动规划母机性能约束Fig.20 Constraint performance of mothership for coordinating motion planning under 5 m/s wind
图21为缆绳收放的长度、速度以及加速度,可以看出缆绳收放过程的状态量均未出现剧烈波动,表明缆绳收放过程平滑。此外,缆绳收放长度小于300 m,速度大小小于5 m/s,加速度大小小于1 m/s2,满足设定约束范围。

图21 5 m/s常值风下协调运动规划时缆绳收放状态Fig.21 Parameters of cable winch control for coordinating motion planning under 5 m/s wind
4 结 论
本文针对非匹配包线下固定翼无人机拖曳式空基回收过程中缆绳-浮标组合体易受气流扰动而不稳定的问题,开展了基于盘旋拖曳系统运动规划的浮标轨迹稳定控制研究,主要结论如下:
1)针对非匹配包线下固定翼无人机拖曳式空基回收过程中的浮标轨迹稳定问题,提出一种实时协调母机运动和缆绳收放的方法,从而在实现浮标拖曳轨道精准稳定的同时提高浮标轨迹控制的灵活性和高效性。
2)综合考虑母机飞行能力、缆绳收放能力等拖曳系统物理约束,构建基于母机运动和缆绳收放的拖曳系统浮标轨迹跟踪最优控制模型,并采用hp自适应Radau伪谱法将所建多约束最优控制问题转化为非线性规划问题求解。
3)后续将进一步从气流扰动下拖曳系统直线转为盘旋过渡飞行协调运动规划和母机/拖曳浮标三维轨迹的高抗扰、精确跟踪控制方面展开深入研究,从运动规划间接控制和拖曳轨道跟踪直接控制两方面,全面提升拖曳浮标稳定盘旋控制精准,支撑非匹配包线下无人机成功空基回收。
