高速射弹小角度入水弹道特性分析
2023-06-26祁晓斌刘喜燕袁绪龙
祁晓斌,刘喜燕,施 瑶,*,王 瑞,袁绪龙
(1.西北工业大学 航海学院,陕西 西安 710072;2.西北机电工程研究所,陕西 咸阳 712099)
0 引言
目前水下防御手段主要以气幕弹、声诱饵等软防御方式[1-3]为主,水下主动防御领域手段有限,基于舰载火炮发射的超空泡射弹作为可以直接硬杀伤水下来袭鱼雷或潜艇的新型防御武器,受到越来越多的关注,但是通过舰载火炮发射高速射弹时由于射角的原因使得射弹入水角过小,极易出现跳弹现象。因此,对高速射弹小角度入水弹道及其稳定性的研究具有重要的意义。
入水过程指运动体由空中以一定的速度和角度转入水中运动的过程及其伴随发生的现象。对入水问题的研究,早期研究主要涉及水上飞机的降落、鱼水雷的投放、救生舱的降落等方面[4],在这些复杂过程中,由于巨大冲击力作用,航行体结构的稳定性,内部单元的安全性,以及弹道的可控性都受到极大的挑战。随着欧美国家超空泡技术的快速发展以及相关武器装备的研制,国内围绕超空泡亦展开了大量的研究。目前众多学者主要通过理论建模、试验和CFD 仿真对空泡生成与溃灭变化、航行体载荷变化和弹道稳定性等相关方面进行研究,并取得了巨大的成果。SAVCHENKO 等[5]研究了入水角度对航行体入水过程空泡的影响,并对不同姿态入水进行了大量试验研究。TRUSCOTT[6]基于LOGVINOVICH 提出的空泡独立膨胀原理对射弹高速斜射入水空泡形态进行研究,并对入水空泡发展过程进行分析,理论与试验结果吻合度高。SCHAFFAR 等[7]针对入水速度从600~1 036 m/s,对平头射弹水平入水进行实验研究,利用20 mm口径枪械发射,通过高速摄像获得了入水空泡形态,采用激光测量装置实现了射弹的运动速度的测量,与LEVINSON 和SEREBRYAKOV 的理论公式结果进行了对比,试验与理论结果具有较高的一致性。齐亚飞[8]开展以150 m/s 速度范围内、不同头型等工况高速入水实验研究,分析了垂直以及大倾斜角下入水过程的弹道稳定性。李佳川[9]对高速射弹入水过程进行弹道仿真,通过对比分析得出了初始扰动角速度、射弹密度以及入水角对超空泡射弹入水过程弹道转变特性的影响机理。施红辉等[10]搭建入水实验设施,对不同头型的钝头体进行了倾斜和垂直入水实验研究,发现入水速度影响空泡的闭合方式,试验提取的入水空泡形态与理论公式得出的空泡形态比较吻合。侯宇等[11]利用高速摄像技术进行超空泡射弹小角度入水试验研究,分析了射弹小角度入水过程中的弹道特性与压力波传播特性。综上所述,目前开展的研究工作主要基于理想或者简化模型对入水过程进行研究,分析了入水速度、入水角度或入水攻角等单一影响因素对入水弹道特性的影响,获得了尾拍现象对入水稳定性的影响规律,而针对由于扰动形成入水尾拍与旋转滑水运动过程的研究鲜有文献报道。
本文以100 mm 口径的空气炮为发射平台设计了入水试验系统,通过高速摄像与内测单元记录入水过程中空泡形态与弹道参数,并对试验工况进行数值模拟,分析高速射弹入水过程中的运动特性及其形成机理。
1 入水试验系统
本文设计的高速射弹入水试验系统如图1所示,由试验水池、浮桥、发射机构、发控系统、照明系统、高速摄像、内测系统、拦截回收装置和试验模型等组成。发射装置采用高压氮气推动射弹在6 m 长发射管内加速运动。在与弹道同一深度处悬挂水下摄像装置拍摄射弹运动过程,布置拦截装置回收试验模型。

图1 试验系统示意图Fig.1 Schematic diagram of experiment system
内测单元模块如图2所示,采用模块化设计,3 个通道的加速度计通过延长线与主板连接,加速度计模块采用单面电路板设计,与内测支架刚性连接。
图2 内测单元模块Fig.2 Internal measurement unit module
主要技术指标如下:
●三轴加速度计,量程:250g。
●三轴角速率陀螺,量程:2 000(°)/s。
●采样精度:16 位。
●采样率:3 kHz(6 通道同步)。
●容量:128 kB,最大采样率时存储约3.5 s数据。
图3给出了试验模型。设计适配器结构与模型配合,能够实现在圆形发射管内装填发射。试验过程中,射弹运动速度较快,采用高速相机记录射弹空泡发展过程,而对于入水弹道数据则采用射弹模型内部安装内测系统,记录6 自由度运动参数。内测系统在装填射弹前启动,发射过程中,当射弹轴向过载连续16 次采样结果超过16g时内测开始记录数据,连续记录2.5 s 数据后停止记录。待回收取下内测记录仪,通过数据线读取记录内容,利用自编MATLAB 程序进行处理,得到弹体从发射到撞击拦截板过程的运动参数。

图3 试验模型Fig.3 Experimental model
2 数值计算方法
2.1 流场求解方法
研究中采用流体体积(VOF)多相流模型[12]描述高速入水过程中由空气、水蒸气、水形成的多相流动。流场控制方程由连续方程、动量方程、湍流方程等组成。其中采用基于Baselinek-ω的添加涡黏度限制方程获得的SST 湍流模型[13],采用Schnerr and Sauer 空化模型[14]对入水过程中的空化现象进行模拟。采用忽略温度修正项的Tait 状态方程[15]实现射弹高速入水过程中水相的压缩性。
2.2 计算模型及边界设置
以带尾翼射弹作为研究对象,射弹头部采用圆盘空化器,尾翼采用梯形外形,呈周向6 瓣均布,如图4所示,主要尺寸参数如表1所示。

表1 射弹主要参数Table 1 Main parameters of projectile
图4 射弹外形示意图Fig.4 Outline sketch of projectile
计算域选取长方体域,由于射弹速度极高,流场影响范围大,通过多次验证计算域边界的影响,最终确定计算域尺寸为1 500 mm×1 000 mm×1 000 mm,为了减小计算量,采用半模计算,模型处于计算域的中心靠左位置。采用流体仿真软件FineMarine的前处理器HEXPRESS 完成计算域网格划分,划分原则为加密射弹头部附近网格、细化弹体圆柱段壁面网格、加密超空泡射弹预期入水位置附近的网格。综合考虑如上网格划分要点以及整体计算的经济性,经过网格无关性验证,计算域网格总数为120 万左右。最终形成的计算域、边界设置及网格划分情况如图5所示。
图5 计算域模型Fig.5 Calculation domain model
2.3 动网格方法
高速射弹小角度入水过程中弹体将发射平动与转动,通过使用动网格技术实现弹体的较大角度转动。本文采用动计算域法[16]实现弹体运动。动计算域法设置计算网格随弹体同步运动,计算网格本身与弹体并没有相对运动,可以实现多自由度计算同时保持较高的网格质量,可以满足计算需求。基于FLUENT 对超空泡射弹进行流场、运动耦合计算,弹道仿真计算模型主要包括流场求解、射弹的运动求解和边界运动求解3 个部分,其中流场求解由FLUENT 的求解器完成,提供运动求解的基本素材;运动求解由UDF 完成,从流场求解结果中获取弹体的受力和力矩,根据运动和动力学关系求解射弹的运动;边界运动由UDF控制,FLUENT 求解器完成。仿真计算基本流程如图6所示。

图6 仿真计算流程图Fig.6 Flow chart of simulation calculation
3 计算结果与分析
试验工况定为20°入水角125 m/s 速度发射入水,仿真工况定为相同条件下三自由度入水过程。
图7为典型时刻试验与仿真空泡形态对比图。由图7可以看出,在t1时刻,弹身空泡透明,未出现沾湿,而尾翼段气水掺混现象明显,尾翼出现沾湿,分析认为入水后由于受到空泡不对称现象的影响,射弹尾翼沾湿,射弹尾翼受到低头力矩开始低头;在t2时刻,弹体持续向下低头,达到尾拍周期内最大俯仰角,射弹迎流面沾湿,弹身上表面气水掺混加剧,出现空泡浑浊现象;随后受到尾拍力的作用弹体开始抬头,如此以往弹体开始周期性的尾拍,见t3时刻,弹身下表面出现沾湿,即浑浊的空泡;随后入水一段时间之后随着速度的降低,尾拍幅度越来越小,最终速度降到一定时基本没有尾拍发生,此时空泡已经无法包裹弹体,射弹基本处于全沾湿状态,见t4时刻。仿真环境下入水过程中射弹同样出现了规律性尾拍,仿真空泡直径与试验空泡直径相比接近。试验高速摄像截图中射弹沾湿位置与仿真结果有一定差距,主要原因为仿真工况下射弹以三自由度运动,试验条件下射弹入水过程中会出现有一定角速度的滚转运动。
图7 试验与仿真空泡对比Fig.7 Comparison of experimental and simulated bubbles
图8给出了高速射弹入水全弹道参数,图9给出了高速射弹试验过程中出现的超空泡旋转滑水现象。结合图8和图9可以看出,在t=0.08 s时刻前,为射弹在发射管内的加速过程。射弹在出管时刻速度达到125 m/s,由于发射管口距水面较近,做近似匀速运动;在t=0.12 s 时刻,射弹头部撞水,此后做减速运动;射弹主要在纵对称面内运动,z方向的速度分量较小;射弹在入水过程中形成了尾拍现象,俯仰角速度ωz呈双向振荡特性,其俯仰峰值在–1 500~1 500(°)/s 范围内振荡,其他轴系下的角速度变化范围较小。射弹入水前,射弹的x轴和z轴发生横滚和偏航运动,入水后由于水动力特性的剧烈变化,使得射弹形成了以周期性尾拍与周期性旋转滑水耦合作用下的动平衡机制的运动模式,与图10中的弹体沾湿形态相对应。
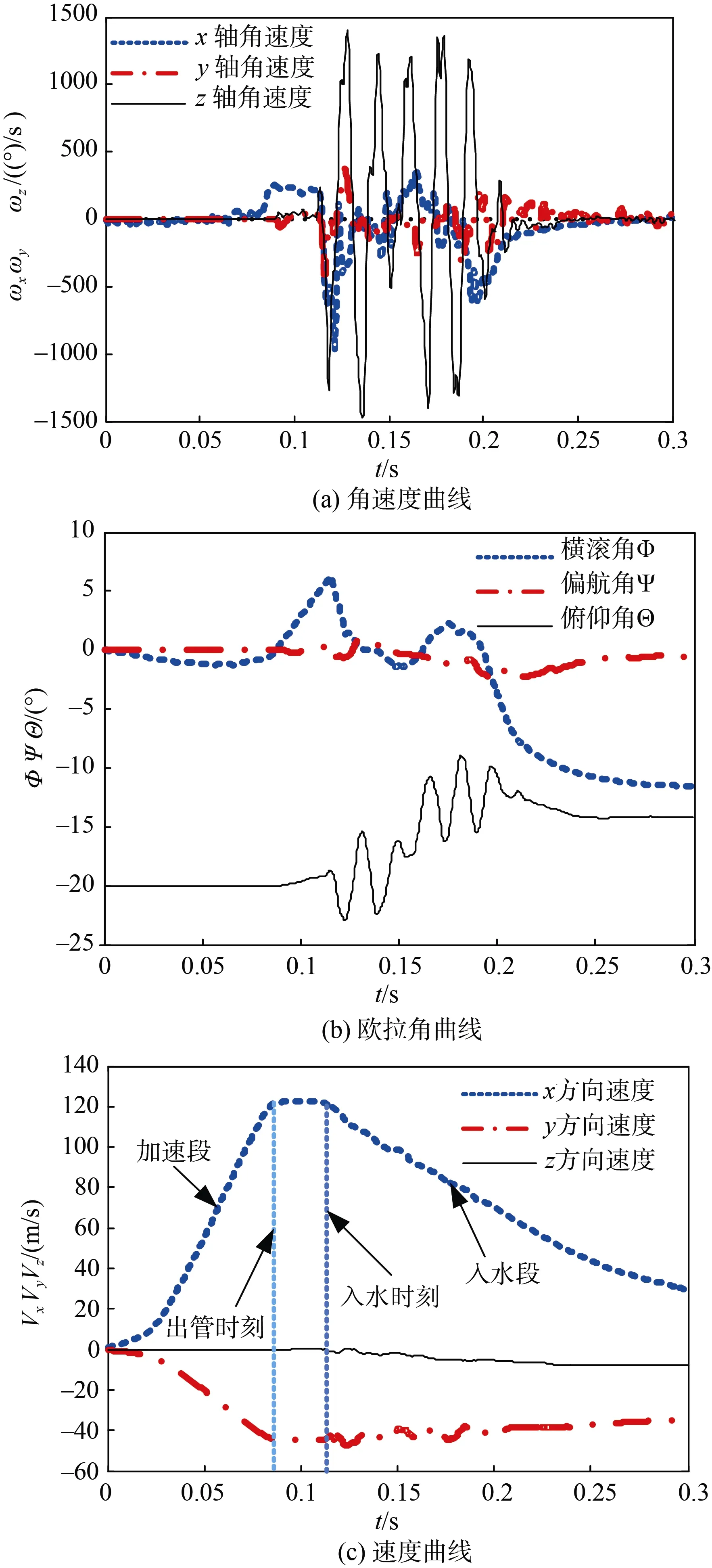
图8 试验弹道参数测量结果Fig.8 Measurement results of test trajectory

图9 高速射弹超空泡旋转滑水现象Fig.9 Rotation skiing phenomenon of supercavitation of high-speed projectile

图10 射弹与流场耦合状态Fig.10 Coupling state of projectile and flow field
图11为试验和仿真环境下俯仰角速度曲线对比。由图11可以看出,试验下射弹入水后初始俯仰角速度较仿真结果大,分析认为外界的干扰如发射管发射后尾气的影响等因素,一个尾拍周期后试验与仿真的尾拍角速度峰值大小基本一致,同时尾拍周期也基本接近,说明试验与仿真结果比较接近。试验结果中射弹尾拍曲线上升段均存在一个较小的波动,对此可能原因为试验下射弹是六自由度运动,其余2 个平面同样发生有尾拍,由此导致曲线存在波动现象,仿真下射弹为三自由度运动,曲线比较平滑。

图11 试验与仿真俯仰角速度对比Fig.11 Comparison of pitching angular velocity in experiment with that in simulation
图12为地面系下试验与仿真x向速度曲线对比。由图12可以看出,试验与仿真下x方向速度曲线在入水前期基本重合,后期出现有一定差异,最大误差为4.5%。综上所述,试验与仿真结果中空泡外形以及弹体运动姿态变化基本一致,内测数据和仿真弹道数据的对比也基本接近,可以认为本文所用计算方法可以取得良好的计算结果,弹体运动与试验对比具有较好的一致性。

图12 试验与仿真x 轴方向速度对比Fig.12 Comparison of x-axis velocity in experiment with that in simulation
4 结束语
本文对高速射弹自由运动的弹道特性进行了试验研究,基于高速摄像技术获得了入水空泡发展形态,通过内测系统记录了射弹的运动参数。所得主要结论如下:
1)射弹入水能形成光滑透明的空泡,低头力矩使得尾翼出现沾湿,加剧了空泡的不对称性发展;随着尾拍运动的形成,空泡出现了复杂的水气掺混现象,主要原因为受到横滚角的影响,使得空泡发生扭曲变形。
2)入水弹道呈尾拍、横滚和划水等综合运动特征,以尾拍运动为主,其脉动特性呈先增大后减小的趋势;入水存在横滚、俯仰角速度时射弹水中主要运动特征为周期性尾拍与周期性旋转滑水耦合作用下的动平衡机制。
3)通过与试验结果进行对比,数值仿真获得的结果具有较好的一致性,建立的数值仿真方法在研究高速射弹入水过程具有较高的可信度。
