基于磁编码器的车用转向电机控制系统设计
2023-06-25吴珏杨广春
吴珏 杨广春

摘 要:采用磁编码器作为电机位置传感器,装配上采用90°差分方式摆放,有效消除共模噪声,并对采样信号进行软件滤波处理。电机控制系统采用矢量控制,采用转速环和电流环闭环控制方式实时控制电机的转速和电流。在基于CKS32F103C8T6芯片的硬件平台上,实现了对转向电机的控制,实验表明,该系统具有良好的控制性能。
关键词:线性霍尔;矢量控制;磁编码器
中图分类号:TM33;TP273;TP391.4 文献标识码:A 文章编号:2096-4706(2023)08-0068-04
Abstract: The magnetic coder is used as the motor position sensor, 90° differential arrangement is adopted for assembly to effectively eliminate common mode noise and software filtering of the sampled signal. The motor control system adopts vector control, using the speed loop and current loop closed-loop control method to control the speed and current of the motor in real time. The control of the steering motor is realized on the hardware platform based on the CKS32F103C8T6 chip, and the experimental results show that the system has good control performance.
Keywords: linear hall; vector control; magnetic encoder
0 引 言
随着汽车电子技术的高速发展,汽车转向助力系统已由传统机械助力、液压助力,发展到电动转向助力系统[1,2]。电动转向助力控制器作为汽车最重要的转向系统部件,其性能的好坏直接影响着汽车的行驶的安全性和可靠性[3]。电动助力转向控制器主要采用矢量控制技术[4,5]控制直流无刷电机的转矩输出,不仅要求汽车的助力电机在各种转向工况下能快速准确地输出助力转矩并能实时跟踪目标转矩,而且还要求输出平稳高效的转矩,在运转过程中不能出现转矩突变等情况。电机主要部件的磁编码器具有体积小、抗干扰能力强等优点,又由于在位置检测和角度计算上都優于传统的六步方波法来控制无刷直流电机[6],故用此传感器应用于电机控制中能有效提高目标转矩的准确性,在高转矩运行下也无明显顿挫感。
本文提出了基于磁编码器的车用转向助力电机控制系统方案,通过对磁编码器信号处理,相电流检测等精准的电机位置检测手段,使电机转向系统在各种工况下都能平顺的运转下去。
1 助力转向控制器整体系统方案
1.1 系统硬件方案架构
本设计采用32位单片机CKS32F103C8T6作为主控芯片,该芯片的内核为Cotex-M3,总线频率最高72 kHz,128 KB字节Flash内存,1路CAN总线,1个16位带死区控制和紧急刹车,用于电机控制的PWM高级控制定时器。3个16位定时器,每个定时器有多达4个用于输入捕获/输出比较/PWM或脉冲计数的通道和增量编码器输入,1个12位16通道的ADC采样模块用于各模拟量的采集。硬件方案主要由开关电源电路、电压采样、三相电流采集信号处理、MOS管驱动电路、磁编码器信号检测电路组成。从图1系统硬件方案框图可以看出,开关电源电路为整套系统提供所需12 V、5 V和3.3 V的电源。通过磁编码器检测电路来检测电机位置信号,将电机位置信号实时传输给控制芯片;通过电流检测电路将三相电流采集的模拟信号传输给控制芯片,控制芯片根据换向逻辑和负载使用情况输出相对应的PWM调制信号,通过逆变电路实现对电机的电压电流调制控制。电路中还包含电流短路保护、电压检测、电源防反接等保护电路,在突发短路或接线操作失误时能有效保护后级电路不被烧毁。
图2是硬件电源结构:电源输入通过BUCK降压电路输出15 V电源,主要用于MOS管的驱动电压;15 V电源通过线性稳压后转为5 V电源,主要用于霍尔等外设部件;5 V电压通过稳压电路转为3.3 V电源,主要用于单片机供电。电源输入端采用宽电压输入范围6 V~70 V的电源芯片XL7046,搭配外围的电感和二极管组成BUCK电路,VIN输入电压范围19.2 V~28.8 V,输出VOUT电压为15 V。该电路中位号V1 MOS管CRST055N08N具备电路防反接功能,当电源线正负接反时,MOS处于截止状态,无法形成有效回路,能对后端电路起到保护作用,防止其他电子元器件损伤。15 V后端采用AMS1117和MD7533逐级转化为5 V和3.3 V。
图3为磁编码器采样电路,磁编码传感器采用四个线性霍尔作为传感器,并做差分方式放置,以下采用1组电路作说明,线性霍尔输出的波形为5 V正弦波,单片机采用3.3 V电源,因此需要进行电平转换,采用运算放大器将原来的输入信号转化为0.82倍,经过RC滤波后送入单片机AD采样口。
逆变电路主要由板桥驱动电路和功率开关电路组成。图4为三相全桥逆变电路,它由6个功率场效应管(MOSFET)组成,工作在两两导通的状态,将直流电逆变为可调的交流电,本设计开关频率设计为15 kHz。
1.2 磁编码器工作原理和信号处理
磁编码器是一种电机位置角度和位移检测的传感器,其工作原理是采用线性霍尔元件或者磁阻元件,对电机角度或者转子位移变化的磁性实体进行测量[7-9]。本系统采用线性霍尔元件作为磁编码器的主要采集元件。磁编码器检测电路信号发生部分的结构为单对磁极结构。图5为单对磁极四信号检测结构示意图,磁钢环固定在转子上,四个霍尔元件固定在定子上,均匀分布在圆周上,霍尔元件发出的信号A+与A-,B+与B-分别差分可得到两相信号A与B,用于消除共模噪声及部分机械偏差。
A、B两相电压信号与转子角度对应关系,图6为两相信号与角度对应关系。模拟信号经过模数转换后,用两相信号的符号和大小关系可将一个旋转周期分成若干区间,每个区间内,任一相的电压与角度都一一对应,利用电压-角度变化斜率较大的一相判断角度,可得到较高的角度精度和分辨率。
根据两组差分信号UA和UB,两组曲线相交点,图6可以将曲线分为8段,每一段曲线值都对应了相对应的角度,计算角度时只需根据AD采样值即可。
磁编码器输出的初始信号为电机转子角度位置的正余弦函数,需要使用反正切法进行位置解码[10],但是由于初始信号叠加了一定的噪声,适用性不强,为了获得更准确的电机转子角度和电机转子转速等信息,首先需要对磁编码器输出的信号做滤波处理。本设计通过一阶低通滤波器的方法对输出信号进行滤波降噪处理。
图7为一阶方程模型可得时域方程(3),其中R为滤波电阻,C为滤波电容,U1为输入电压,UC为滤波电压:
由此式(7)可对滤波信号做一阶滤波处理后,带入软件设计中,对磁编码器采样信号进行优化。
2 电机矢量控制架构
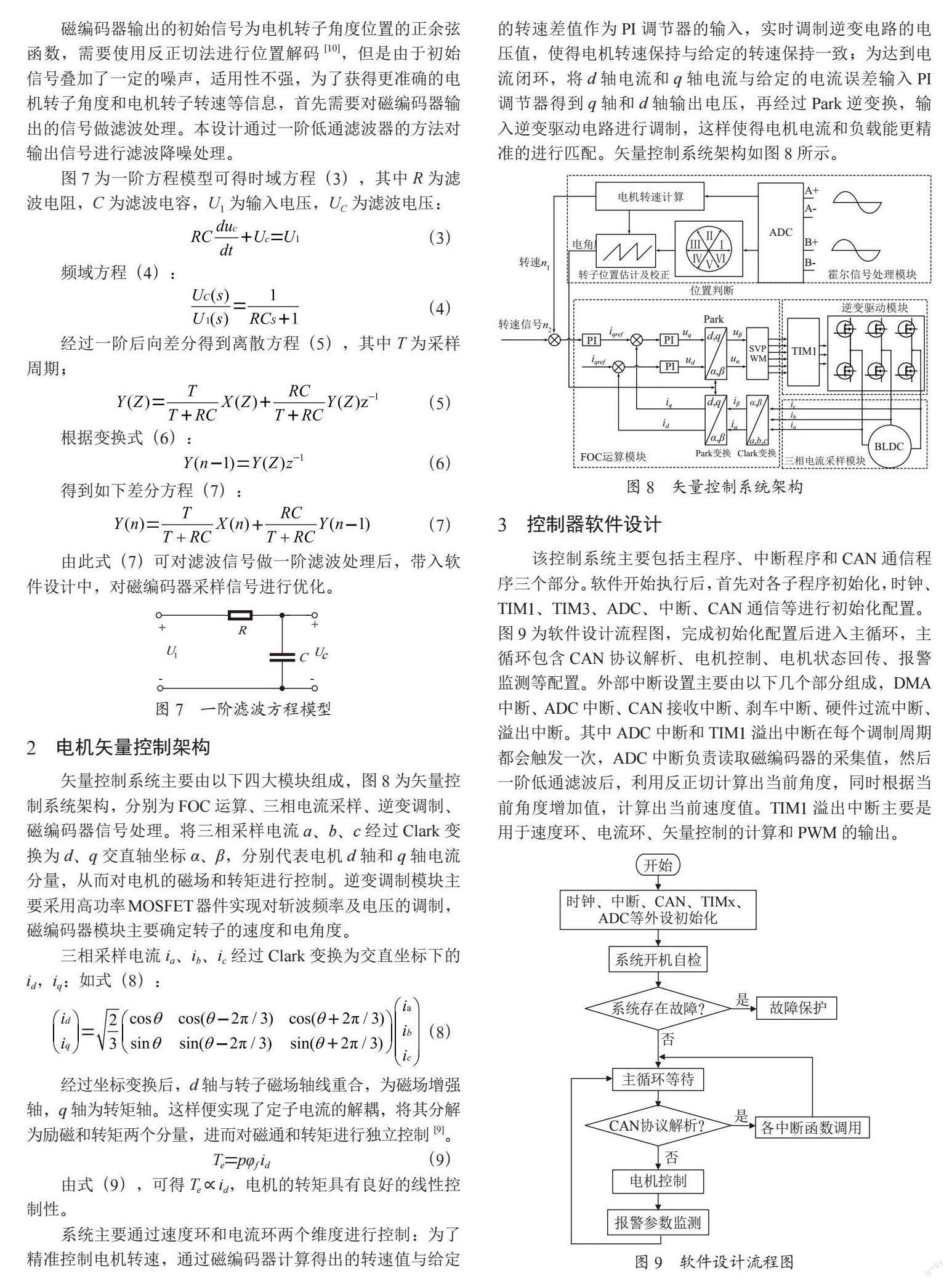
矢量控制系统主要由以下四大模块组成,图8为矢量控制系统架构,分别为FOC运算、三相电流采样、逆变调制、磁编码器信号处理。将三相采样电流a、b、c经过Clark变换为d、q交直轴坐标α、β,分别代表电机d轴和q轴电流分量,从而对电机的磁场和转矩进行控制。逆变调制模块主要采用高功率MOSFET器件实现对斩波频率及电压的调制,磁编码器模块主要确定转子的速度和电角度。
三相采样电流ia、ib、ic经过Clark变换为交直坐标下的id,iq:如式(8):
经过坐标变换后,d轴与转子磁场轴线重合,为磁场增强轴,q轴为转矩轴。这样便实现了定子电流的解耦,将其分解为励磁和转矩两个分量,进而对磁通和转矩进行独立控制[9]。
Te=pφf id (9)
由式(9),可得Te ∝ id,电机的转矩具有良好的线性控制性。
系统主要通过速度环和电流环两个维度进行控制:为了精准控制电机转速,通过磁编码器计算得出的转速值与给定的转速差值作为PI调节器的输入,实时调制逆变电路的电压值,使得电机转速保持与给定的转速保持一致;为达到电流闭环,将d轴电流和q轴电流与给定的电流误差输入PI调节器得到q轴和d轴输出电压,再经过Park逆变换,输入逆变驱动电路进行调制,这样使得电机电流和负载能更精准的进行匹配。矢量控制系统架构如图8所示。
3 控制器软件设计
该控制系统主要包括主程序、中断程序和CAN通信程序三个部分。软件开始执行后,首先对各子程序初始化,时钟、TIM1、TIM3、ADC、中断、CAN通信等进行初始化配置。图9为软件设计流程图,完成初始化配置后进入主循环,主循环包含CAN协议解析、电机控制、电机状态回传、报警监测等配置。外部中断设置主要由以下几个部分组成,DMA中断、ADC中断、CAN接收中断、刹车中断、硬件过流中断、溢出中断。其中ADC中断和TIM1溢出中断在每个调制周期都会触发一次,ADC中断负责读取磁编码器的采集值,然后一阶低通滤波后,利用反正切计算出当前角度,同时根据当前角度增加值,计算出当前速度值。TIM1溢出中断主要是用于速度环、电流环、矢量控制的计算和PWM的输出。
4 实验与结果
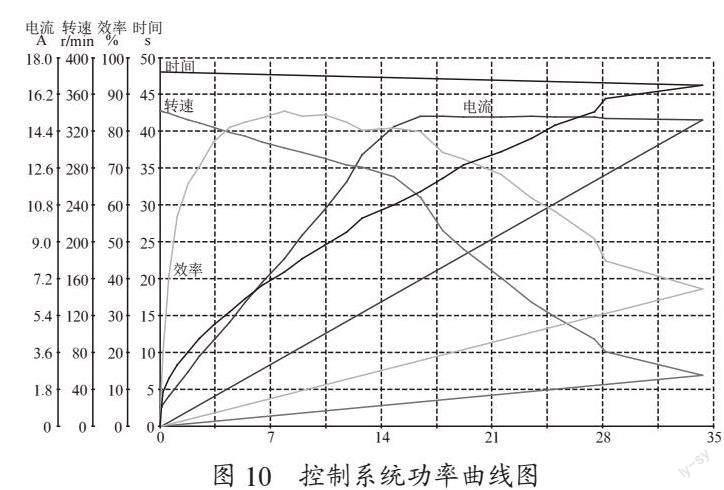
本设计转向电机采用直流无刷电机,额定电压为24 V,额定功率为500 W,位置传感器为磁编式传感器。控制器采用的单片机是CKS32F103C8T6,在此硬件平台上,用测试功系统测试,得到曲线。图10为控制系统功率曲线图,从曲线中可以看出,速度电流转矩都没有突变,变化平稳,保证了助力电机在运转过程中的平稳性和可靠性。由表1特征点数据显示电机在不加载时转速为341 r/min,达到了额定转速,最大转矩为34.3 N.m,最大效率达到了85.5%,具有较宽的效率曲线,各曲线完整平滑,控制器最大电流为14.96 A。
5 结 论
线性霍尔的磁编码器结构简单体积小,具备较强的抗干扰能力和较快的响应速度,在成本上较光编等同性能编码器也有很大优势。本文使用基于线性霍尔的磁编码作为电机矢量控制的位置传感器,通过对采样信号的处理,控制器能满足设计需求,实验结果表明该控制器能满足助力转向的应用要求。后续此方案还可以应用于低压伺服,纺机等电机类控制项目中。目前该控制系统的电流设计在15 A,所产生的一些电磁干扰还不是很大,若后续要设计更大功率的控制器,还需再对磁编码器的信号进行更高阶的滤波处理,控制器电流采样处理等也要进一步优化,以便提高电机转子角度计算的准确性。
参考文献:
[1] 丁希波,王秀松.汽车电动助力转向系统的发展趋势分析 [J].西部皮革,2018,40(10):160.
[2] 莫以为,孙洋洋,黄伟.循环球式液压助力转向系统建模仿真及试验验证 [J].液压与气动,2014(10):54-59.
[3] 牛继高.汽车电动助力转向系统测试平台的开发与研究 [D].重庆:重庆交通大学,2009.
[4] 李克靖,徐婕,吴珏,等.基于STM32的无刷直流电机矢量控制系统 [J].电子与封装,2020,20(9):29-34.
[5] 耿永,王贤会.一种基于BLDC电机的矢量控制电路设计 [J].电子与封装,2020,20(3):22-28.
[6] 林源文,殷希,朱世林,等.一种霍尔磁性旋转位移传感器控制电路:CN201720198843.6 [P].2018.03.16.
[7] 唐金元,王翠珍,于潞.微小电压测量放大电路的抗共模噪声设计方法 [J].中国测试,2012,38(4):83-85+109.
[8] 周鳳坤,张大龙.磁编码器的安装与调整技术研究 [J].科技创新与应用,2017(1):52-53.
[9] 王明兴,董秋生,王凯,等.用于开关磁阻电机的转子角位移检测装置 [J].电机技术,2009(5):49-50.
[10] 苗会彬.电动助力转向系统中旋转变压器的角度解码方法:CN201710010866.4 [P].2019.06.25.
作者简介:吴珏(1986—),男,汉族,江苏丹阳人,工程师,本科,研究方向:嵌入式硬件开发及汽车电子项目开发等。
