基于高精度地图的车道推荐开发
2023-06-14蔡珂芳姚为民
蔡珂芳,姚为民
基于高精度地图的车道推荐开发
蔡珂芳1,姚为民2
(1.零束科技有限公司,上海 201600;2.吉林大学 汽车工程学院,吉林 长春 130025)
为满足当前高阶智能化车辆对车道推荐引导的需求,文章基于车机导航地图(SD-Map)和高精度地图(HD-Map)进行关联匹配,完成道路和车道的映射关系表达,提出了可行域空间的路网模型和车道综合推荐系数的计算规则。基于行车道路剩余距离、车道限速和车道拥堵信息,建立车辆运动学模型,使用动态窗口法(DWA)优化算法定义速度空间,建立以车道路剩余距离、车道限速和车道拥堵信息为因子的综合成本函数,通过迭代优化获得最优车道推荐列表。最后通过实车测试验证优化结果,与基于静态地图数据推荐的车道相比,能够更加有效灵活地基于距离目的地剩余距离、车道限速情况和车道拥堵状态进行车道推荐,保证车辆当前行车速度最优。
高精度地图;车道推荐开发;路网模型;SD-Map;HD-Map;DWA
为适应自动驾驶需求,提供可靠、稳定的道路环境信息,四维图新、高德、百度等图商在传统地图基础之上,推出了精度更高、元素维度更丰富,具有一定鲜度的高精度地图,其支持自动驾驶车辆进行车道级定位及车道级规划,以满足安全稳定的运行环境。研究所提到的高精度地图是一种面向L3级及以上级别高阶自动驾驶的地图,与传统的导航电子地图、先进驾驶辅助系统地图相比具有精度高、维度丰富、鲜度能够保证的特点。
目前已有多家车企在高精度地图方面取得重要应用,百度的Robtaxi能够基于高精度地图完成车道级定位,实现城区道路的车道级路径规划[1],蔚来、小鹏等车企基于高精度地图和融合定位技术实现高速领航辅助(Navigate on Pilot, NOP)功能,实现车辆自动变道、自动上下匝道等高阶功能,以上汽集团为代表的知己、非凡等车型均基于高精度地图完成高阶自动驾驶功能开发,大幅提升了驾乘性能的智能化。
针对高精度地图当前的应用形态,主要概括为以下三个方面[2-3]:1)高精度地图可以实现车道级定位,即基于全球卫星导航系统(Global Navigation Satellite System, GNSS)/载波相位差分技术(Real-Time Kinematic, RTK)、惯性测量单元(Inertial Measurement Unit, IMU)信息实现车辆的绝对定位,进而获取车辆周围道路环境信息,结合Camera信息和高精地图信息进行邦路计算,最终实现车道级定位技术;2)高精度地图可以对车端感知设备进行冗余完善,在遇到车道线模糊、下雪、下雨等恶劣环境时,车辆自身传感器会产生不可靠的行为,可结合高精度地图进行冗余管理,提升感知效果;3)高精度地图可以实现超视距感知和车道级诱导,其作为一种不随外界环境变化的静态信息存储车端,可提前对复杂路况信息进行规划决策,实现车道级规划。
尽管多家图商基于高精度地图进行车道级定位和规划引导,但其主要针对静态地图元素,比如匝道处、道路合并或者分叉处、车道合并或者分叉处等信息进行基于全局道路级规划的车道推荐,并不能够很好地考虑全局车道间拓扑信息、车道动态通行信息、行车道路剩余距离等信息,最终导致不能有效地进行车道推荐。基于以上问题,提出基于高精地图进行路网模型建模,结合行车道路剩余距离、车道限速信息、车道拥堵信息获得车道推荐系数,为下游决策规划模块提供实时、有效的车道推荐。
1 车道路网模型建模
1.1 高精度地图路网的基础表达
高精地图制作过程中,路网通常由有限个有向线段(Link)和节点(Node)组成,其中Node定义了Link之间的连接关系,由于Link和Node组成的道路网络较为复杂,为了能够高效准确地表达车辆前方的可通行路线,将车辆前方的Link和Node通过道路路线(Path)表示,可以大大简化路网的复杂性[4],如图1所示。

图1 高精地图路网表达
车道作为车辆通行区域的基本单元,主要包括车道的属性、车道之间的拓扑关系,以及车道与道路层之间的映射关系。对车道路网模型建模主要基于所规划的车机导航地图(Standard Definition Map, SD-Map)路径与高精度地图(High Definition Map, HD-Map)进行匹配,然后基于车道与道路层之间的映射关系,识别出车道是否在SD-Map导航路径上存在(onRoute)属性,最后基于onRoute属性、车道之间的拓扑关系,以及图商所推荐的静态路径进行车辆可行域生成。车道属性主要包括车道数目、通行方向、宽度、类型、边线属性、限速信息等,因此,需要将车道按照属性进行切分,以每个section进行定义,基于此所生成的车道可行域能够准确地表达实际路网的结构,如图2所示。

图2 路网section表达
1.2 可行域空间设计
当车辆处于导航状态时,实际路网情况如图3所示,其中车道Lane0、车道Lane1、车道lane2之间连通、车道Lane3与车道Lane4之间联通,可进行变道,具体可行域生成步骤如下:1)基于SD-Map路径表与HD-Map进行匹配,确定车辆终点车道Lane6;2)根据车道间横纵向拓扑关系,由最优静态路径的最远端Lane6开始,向其前向车道和横向车道做拓扑延伸,若具备与最优静态路径上的车道有直接或间接拓扑关系,则作为可行域车道。如图3所示最优静态路径为onRouteList = [Lane6、Lane3、Lane0],基于横纵向拓扑关系,车道可行域空间为onRouteList = [Lane6、Lane3、Lane0、Lane4、Lane1、Lane2];3)将所有可行域空间的车道onRoute属性赋值为True。
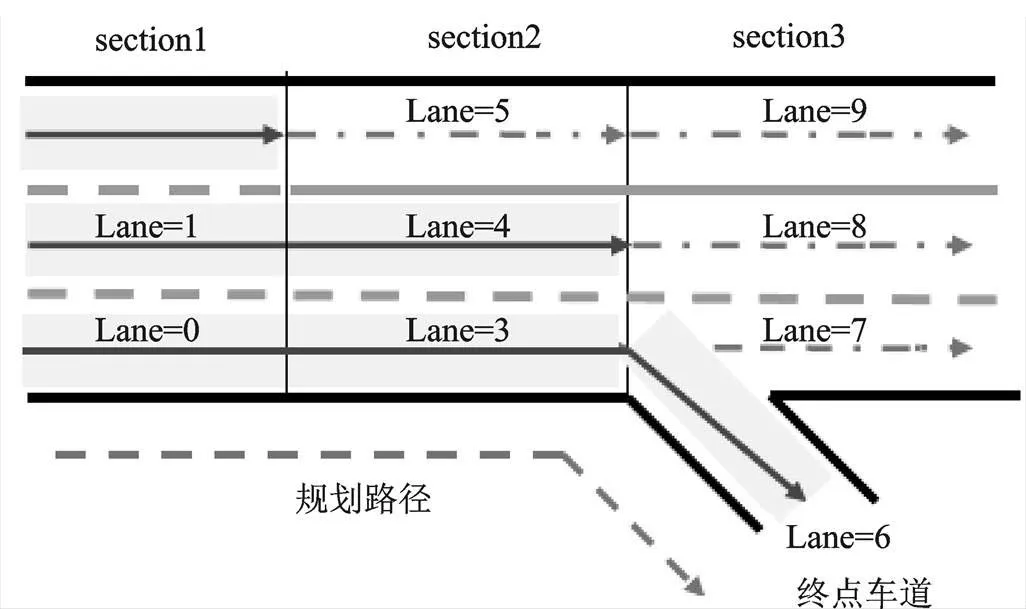
图3 可行域空间表达
1.3 剩余距离定义
为了能够基于全局规划路径,推荐车辆准确进行变道,需要基于可行域空间准确表达车辆在当前车道上能够运行的最长距离(Route_left_ distance)。基于车辆前方所有车道的 onRoute属性,遍历自车所在section的所有车道,并沿着相应车道根据纵向拓扑向前做路径探索,若下游任一车道的onRoute==True,则继续下游探索;若探索到某条Lane的所有纵向下游车道的onRoute == false,则结束探索,并将当前探索到的最后一条lane的终点作为最晚变道点,定义当前自车至最晚变道点的沿路距离为Route_left_distance,如图4所示。

图4 车道剩余距离表达
2 车道推荐系数
2.1 车道推荐系数定义
最基本的路径规划主要是研究在已知的路网环境中,以一定的约束条件和优化目标规划出一条由起点至终点的路径[5]。基于对高精地图处理信息的高效性,以及从车辆决策、规划、控制时效性的考虑,本项目将对位于车辆前方5 km的高精地图数据进行车道推荐优化,综合当前行车道路剩余距离、车道限速信息以及拥堵信息,实时计算行车道路剩余距离系数、各车道限速系数和拥堵系数,通过权重优化,计算各个行车道路的综合推荐系数,获得最终的车道推荐列表。为对比各行车道路的综合推荐系数,定义该值为0~999的整数,其数值越小,推荐程度越高,其中百位表示剩余距离的推荐系数,取值为0~9;十位表示限速的推荐系数,取值为0~9;个位表示拥堵的推荐系数,取值为0~9,从而获取行车道路限速、拥堵等信息和最大剩余距离信息的伪代码如下:
//获得剩余距离最长的行车道路
GetMaxDistInfo (lane_datas, max_dist_info);
//获得行车道路限速、交通拥堵信息
GetLaneInfo (lane_datas, lane_info_map);
{GetSpeedLimitInfo (lane_datas, i, lane_info. speed_limit);
GetTrafficJamInfo(lane_datas,i,lane_info.jam_ level);}
2.2 车道剩余距离推荐系数
考虑到剩余距离对推荐系数的影响为非线性,当剩余距离小于一定阈值时,表示换道距离不能满足换道需求,对应推荐系数应达到最大值9,强烈不推荐变道;反之则对应推荐系数在该位应该达到最小值0,强烈推荐变道。同时考虑到从自车道换道至目标车道时,中间车道的拥堵情况,需要为车辆预留一定的换道距离和交通拥堵导致的预留距离。综上剩余距离推荐系数的伪代码如下:
//获得剩余距离排序的推荐值
GetPriorityByDistance(lane_info_map, max_dist_info, lane_element, cur_lane_index);
{
for(max_dist_lane_pair : max_dist_info)
{
//若当前车道包含在行车道路lane_element, 则推荐车道为0
if(max_dist_lane_pair.first == cur_lane_index);
{
Priority_value = 0;}
//预留变道距离reserve_dist
reserve_dist = 0;
//当前车道位于最长lane_element的右侧
if (max_dist_lane_pair.first > cur_lane_index)
{
//基于相隔车道数目和拥堵信息计算预留距离
reserve_dist=nbr_reserve_jam_dist+lanenum_ reserve_dist;}
//当前车道位于最长lane_element的左侧,计算预留距离
if (max_dist_lane_pair.first < cur_lane_index)
{reserve_dist=nbr_reserve_jam_dist+lanenum_reserve_dist;}
//计算当前行车道路的推荐值
dist_cur_priority_value=ConvertDistanceToPrioty(reserve_dist);}
}
2.3 车道限速推荐系数
在计算各行车道路的限速系数时,需要基于行车道路为基本单位进行限速加权平均,获得的加权限速越高,则对应的道路推荐系数在该位应该达到较小值,伪代码如下所示:
//获得行车道路限速的推荐值GetPriorityBy SpeedLimit(lane_info_map, cur_lane_index);
{//获得当前行车道路的限速信息
cur_lane_info=lane_info_map.at(cur_lane_index);
//当前法规准许最大值120km/h进行0-9等级划分
speedlimit_cur_priority_value=floor((120-cur_ lane_info.speedlimit) / 121.0 * 10)}
2.4 车道拥堵推荐系数
行车道路拥堵系数为0~9分布,对最小拥堵等级和最大拥堵等级之间进行插值计算,对应数值0~9,伪代码如下所示:
GetPriorityByTrafficJam(lane_info_map, cur_ lane_index);
{//获得当前行车道路的限速信息
cur_lane_info=lane_info_map.at(cur_lane_index);
//根据当前交通等级拥堵推荐畅通为0,严重拥堵为9,进行10等级划分0-9
trafficjam_cur_priority_value=floor(cur_lane_ info.jam_level / 10.0)}
3 车道推荐优化
本文提到的车道推荐,由于存在交通拥堵等动态信息,同时考虑到系统对软硬件资源的限制和高效性,本项目使用机器人操作系统(Robot Operating System, ROS)内部提供的动态窗口法(Dynamic Window Approach, DWA)[6]的基础上进行车道推荐优化,其原理主要是在速度空间(,)范围中采样多组速度,并模拟这些速度在一定时间内的运动轨迹,再通过车道推荐评价函数对轨迹打分,最优速度会被映射到行车道路,进而获得最优车道路径,具体思路如下:
3.1 建立车辆运动学模型
考虑到终点研究车道推荐优化算法,并不关注车辆运动学和动力学性能,因此,为了简化模型,提高车道推荐模块高效性,建立以平移速度和旋转角速度的车辆运动学模型[7],假设每段行驶轨迹时间间隔为Δ,当Δ足够小时,车辆轨迹可视为直线运动,得到机器人的运动模型为

式中,x、y、θ为车辆在时刻的坐标位姿;x+1、y+1、θ+1为车辆在+1时刻的坐标位姿;v、ω分别为车辆在时刻的平移速度与旋转角速度。
3.2 建立速度空间
基于车辆运动学模型,建立以[]要素构成的运动学空间约束s,即

在动力学性能约束下,车辆在当前平移速度v和旋转角速度ω工况下,通过Δ时间段,车辆所能达到的速度空间即动力学约束d为

考虑到行驶过程中,交通设施对行驶轨迹也会形成空间约束,假设车辆距离障碍物空间距离为dist(,)车辆以最大减速度进行紧急制动,建立障碍物约束a,即

3.3 建立综合成本函数

式中,dist_cur_priority_value(,)为剩余距离推荐系数,推荐值越低说明所推荐车道到达目的地距离越经济;speedlimit_cur_priority_value(,)为车道限速推荐系数,推荐值越低说明推荐车道可行驶速度越高;trafficjam_cur_priority_value(,)为交通拥堵推荐系数,推荐值越低说明所推荐车道交通越畅通。综上,遍历动态窗口内所有轨迹,获得综合推荐分值G(,)越低,成本越小,获得的车道推荐列表即为最优推荐。
4 应用测试验证
为验证车道推荐优化算法的可行性和准确性,基于实测的感知数据、融合定位数据、交通拥堵等级数据,以到达目的地最小时间和最大速度为目标,以车道推荐系数为优化变量,以交通规则和车辆位姿为约束条件进行应用测试验证。选取安亭汽车收费站至曹安公路收费站的路线数据为对象,将SD-Map路线以道路段形式发送至高精地图接受端,并将SD-Map与HD-Map进行路网信息匹配,获得路径PathID、道路LinkID、车道LaneID的关联表单,所匹配的路线如图5所示。

图5 关联匹配的路线
基于关联表单,取自车前方5 km地图数据(G12往南通方向)对交通拥堵等级进行人为干预设置,基于路网模型进行车道推荐优化,轨迹结果如图6所示,车道推荐优化算法推荐车道为Lane6-> Lane5-> Lane2,在基于较快速车道行驶情况下,完全避开了交通拥堵;图商推荐的车道轨迹为Lane6-> Lane5-> Lane3-> Lane2,主要基于静态地图数据进行推荐,因未考虑到交通拥堵等动态情况导致进入缓行状态,导致所推荐的路径无法满足驾驶需求。可见所提车道推荐算法,能够更好地结合道路和车道规则以及实际情况对车道进行推荐。

图6 车道推荐路线
5 结论
基于SD-Map和HD-Map匹配完成车道推荐优化,主要进行了以下工作:1)基于车道的属性、车道间的拓扑关系,以及车道与道路层间的映射关系提出车辆可行域空间概念,并基于此建立车道级路网模型;2)基于采集的道路数据,提出了行车道路剩余距离系数、限速系数和拥堵系数的计算规则,基于此进行车道推荐优化工作;3)通过测试验证手段,对比了车道推荐优化轨迹和图商所提供的车道轨迹,车道推荐优化算法考虑到车道限速、车道拥堵等动态信息,更加有效地对车道推荐引导。
该研究仍存在一定局限性,由于当前对道路数据采集的局限性,如车道施工状态和车道拥堵等状态无法采集,因此,如对地图数据进行一定人为干预,后期仍需大量路测数据对此算法进行验证和完善。
[1] 周勇,刘尚魁.构建基于Appollo 的高精度地图解决方案[J].电子技术与软件工程,2018(21):139.
[2] 董祚帆.基于高精度地图的自动驾驶车辆车道级路径规划方法研究[D].兰州:兰州交通大学,2022.
[3] 陶璐.高精度自动驾驶地图与传统导航地图路网匹配方法研究[D].武汉:武汉大学,2017.
[4] ADASIS Forum.ADASIS v3 Protocol: v3.1.0[EB/OL]. (2018-07-05) [2023-01-05].https://blog.csdn.net/zyq88 0625/article/details/ 123742297.
[5] 张捍东,郑睿.岑豫皖.移动机器人路径规划技术的现状与展望[J].系统仿真学报,2005(2):439-443.
[6] 卞永明,季鹏成,周怡和,等.基于改进型DWA的移动机器人避障路径规划[J].中国工程机械学报,2021, 19(1):44-49.
[7] 曹彪.基于动态窗口法和改进A*算法的多车路径规划[D].秦皇岛:燕山大学,2022.
Development of Lane Recommendation Based on High-definition Map
CAI Kefang1, YAO Weimin2
( 1.Z-one Technology Company Limited, Shanghai 201600, China;2.College of Automotive Engineering, Jilin University, Changchun 130025, China )
In order to meet the requirement of high-level intelligent vehicles for lane recom- mendation, this paper has completed the mapping relationship between road and lane based on the correlation matching which is from standard definition map(SD-Map) and high-definition map(HD-Map), proposes the feasible domain space of road network, and the calculation rule of the comprehensive lane recommendation coefficient.Based on the remaining distance of road, lane speed limit and lane congestion information, a vehicle kinematics model is established, the speed space is defined by the dynamic window method (DWA) optimization algorithm, and a comprehensive cost function based on the remaining distance of the road, lane speed limit and lane congestion information is established, and the optimal lane recommendation list is obtained through iterative optimization. Finally, the optimization results are verified through the real vehicle test. Compared with the most recommended lanes based on the static map data, it can recommend lanes more effectively and flexibly based on the remaining distance from the destination, the lane speed limit and the lane congestion state, so as to ensure the optimal driving speed of the vehicle.
High precision map; Lane recommendation development;Road network model;SD-Map;HD-Map;DWA
U469.5
A
1671-7988(2023)10-34-06
10.16638/j.cnki.1671-7988.2023.010.007
蔡珂芳(1990—),男,博士,工程师,研究方向为智能制造开发,E-mail:caikf2015@163.com。
