基于飞行仿真的近地告警包线计算
2023-06-09郑峰敏李泽华
郑峰敏,魏 涛,李泽华,刘 琛
(中航西安飞机工业集团股份有限公司, 陕西 西安 710089)
目前,国内多类型飞机均在使用近地告警设备,但是过大下降速率告警模式的告警包线计算方法各不相同[1-3],有的参考国外标准TSO-C151b[4],有的基于统计经验,有的直接使用民机数据。对于首次安装该设备的飞机,过大下降速率告警的关键技术研究目前还处于较空白阶段[5-8]。由于飞机的自身特点,现有经验数据并不适用,设备与飞机的适应性还需要进一步的研究。
因此,系统地研究该项技术,在了解国外飞机该项技术的设计机理的基础上[9-10],结合自身飞机平台的特点,研究该模式下的告警原理,创建仿真计算模型,给出适用于飞机的近地告警包线,指导飞行训练,保障飞行安全,是势在必行的。
本文正是基于此,结合过大下降速率告警模式特点,建立六自由度仿真模型,编写计算程序,实现飞行仿真。通过大量的迭代计算,模拟飞机飞行轨迹,确立最终计算方法,给出告警包线。并结合实际试飞数据及相关标准对比情况,验证计算方法的准确性。
1 近地告警方法与流程
过大下降速率告警模式主要用于监测飞机高度下降是否过快[11-12],旨在为机组人员提供听觉和视觉告警,以防因疏忽大意而导致的可控飞行撞地事故。告警模式示意图以及包线示意图分别如图1、图2所示。低空飞行时,若下降速率过大且离地高度太低,则存在撞地危险,所以需要通过设置合理告警提示来提醒飞行机组调整飞机下降速率及姿态来规避危险[13-15]。
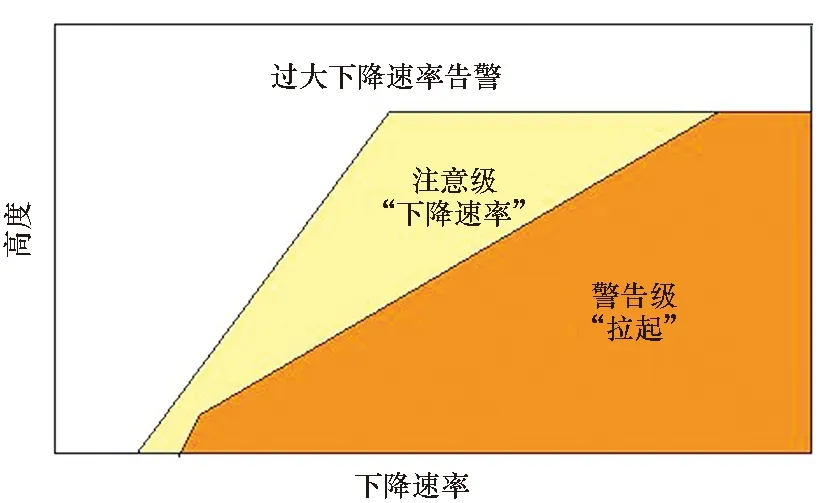
图2 告警包线示意图Fig.2 Alarm envelope diagram
1.1 计算方法分析
图3给出了过大下降速率告警模式数学模型。Hn为飞机在该下降速率下的最小离地安全高度,h1表示飞机从告警时刻到执行改出机动时刻下降的高度;h3包含预留的净空高度(包含模型误差和告警数据源误差等),h1、h3与飞机特性无关。h2表示飞行员操作改出时间内飞机下降的高度。
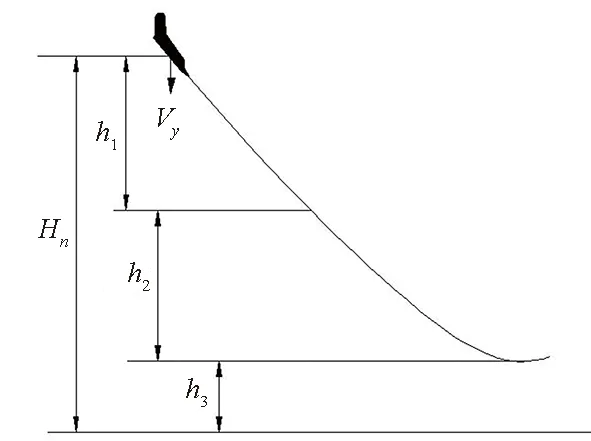
图3 过大下降速率告警模式数学模型Fig.3 Mathematical model of excessive descent rate alarm mode
目前,一般计算并未考虑飞机的姿态变化、舵效、杆力等飞行特性影响。而是假定改出全过程,飞机以平均法向加速度来计算改出高度。然而,飞机从开始响应到下降速率为0时的飞行姿态是一个复杂的动态过程[16],并不能简单地以某一过载来定义,需要结合飞机的发动机数据、气动数据、质量特性数据以及响应过程进行仿真,实时模拟飞机的运动姿态,给出全过程的运动规律,从而计算出飞机改出高度。
本文重点结合飞机的自身特点及操作规律,建立适用于飞机的近地告警计算模型,仿真计算飞机飞行轨迹,分析并验证改出高度h2的正确性,进而给出告警包线。
1.2 飞行仿真模型建立
分析大下降速率告警模式的飞行特点,研究飞机在该模式下的飞行阶段和姿态,建立六自由度飞行仿真计算模型[17-18]。针对不同阶段,对方程做适当简化,保证其适用于仿真计算。
阻力方程:
(1)
升力方程:
sin(α+σ)]-Ysinμ+Lcosμ-mgcosγ
(2)
侧力方程:
sin(α+σ)sinμ]+Lsinμ+Ycosμ
(3)
力矩方程:
(4)
其中:m为质量,V为速度,T为推力,β为侧滑角,α为机身迎角,σ为发动机安装角,D为阻力,γ为航迹倾斜角,μ为航迹滚转角,Y为侧力,L为升力,χ为航迹方位角,M为俯仰力矩,q为俯仰角速度,p为滚转角速度,r为偏航角速度,Lroll为滚转力矩,N为偏航力矩,Ix、Iy、Iz、Ixz分别为飞机相对于机体坐标系的惯性矩和惯性积。
1.3 仿真程序及模型求解
依据飞行仿真运动模型,编写计算程序。程序需要读入飞机的气动力数据、发动机数据、质量特性数据、铰链力矩数据、基本几何参数和飞行状态参数等,各数据库采用矩阵形式实现。
计算的理论基础是非线性运动方程的数值偏微分,微分是通过利用飞机某一特殊飞行状态的小扰动方法进行的,它利用了程序计算出的非线性方程以及其他物理参数。仿真计算模型求解流程简化如图4所示。根据给定的时间步长进行四阶Runge-Kutta方法积分,求解六自由度运动方程,计算出飞机的位置、姿态以及速度、角度等参数,根据计算所得信息,继续求解气动力,逐点运算,直至仿真结束。

图4 仿真计算模型简化流程Fig.4 Simplified flow chart of simulation calculation model
将仿真计算的高度损失与地形模型高度相比较,找出飞行状态空间中飞机临界撞地点。记录所有临界撞地点信息,统计给出高度损失值。结合已知数学模型,曲线拟合后可得飞机的近地告警曲线。
2 告警包线的确定
近地告警包线是系统是否需要报警的唯一依据,因此它的设计及计算是近地告警系统研究中的关键技术,本节目的是确定告警包线的计算方法。以前述告警机理及仿真模型为基础,结合飞机的构型、重量、高度等基本要素,利用已建立的仿真模型,模拟飞机的飞行状态。通过不断的迭代计算,摸索飞机在不同下降速率下的高度损失范围。结合飞行员日常操作习惯,调整仿真计算口令,模拟最接近实际飞行的操作响应,从而确定告警包线。
2.1 计算模型
将最大下降速率告警包线的计算分为三部分:
1)反应延迟阶段——飞行员操作前反应时间对应的高度损失h1;
2)拉升逃逸阶段——飞机拉杆后到下降速率为0时的高度损失h2;
3)安全净空高度h3。
这三者所对应的垂直高度的叠加即为飞机在该模式下不同下降速率所对应的最小离地安全高度,由此给出该告警模式下的包线。
2.1.1 反应延迟阶段
该阶段主要反映飞行员在操作前的反应延迟时间,根据操作者习惯而定。结合飞行员的实际操作情况,给出反应时间为T0。
则反应延迟阶段的高度损失为:
(5)
式中,飞行员操作前反应时间T0是下降速率Vy的函数,Vy越大,则该阶段的高度损失越大。
2.1.2 拉升逃逸阶段
该阶段比较复杂,需要结合飞机的飞行特性,进行六自由度仿真计算,模拟飞机整个操作过程,包括各舵面的操作响应等。现给出仿真计算操作流程:
1)初始状态。设飞机的初始重量为G0,高度为h0,下降速率为0,水平速度为V0,此时飞机处于配平状态。
2)收油门杆。调整油门杆位置,使发动机推力调至慢车,保持仿真计算,飞机下降速率逐渐增大。当下降速率增大到规定的Vy0、高度降至规定的操作高度h01时,此步需要反复迭代试算。
3)反应。预设1 s飞机响应时间。
4)推油门杆、拉杆。调整油门杆位置,由发动机慢车推力上调至额定推力;拉杆,使飞机过载为Ny(以不超过飞机的最大结构过载限制为原则,同时考虑机组人员的可操作性以及保留足够的安全裕度,具体数据视情而定);该动作均是1 s完成。
5)保持。握杆保持,飞机下降速率逐渐减小,直至进入爬升状态。
2.1.3 安全净空高度
标准TSO-C151b[4]中给出的最小地形净空值为定值。本文结合实际使用经验给出的安全净空值是随着下降速率的增大而增大的。
安全净空高度:
h3=f(Vy)=k2·Vy+b
(6)
2.2 改出高度h2计算结果及分析
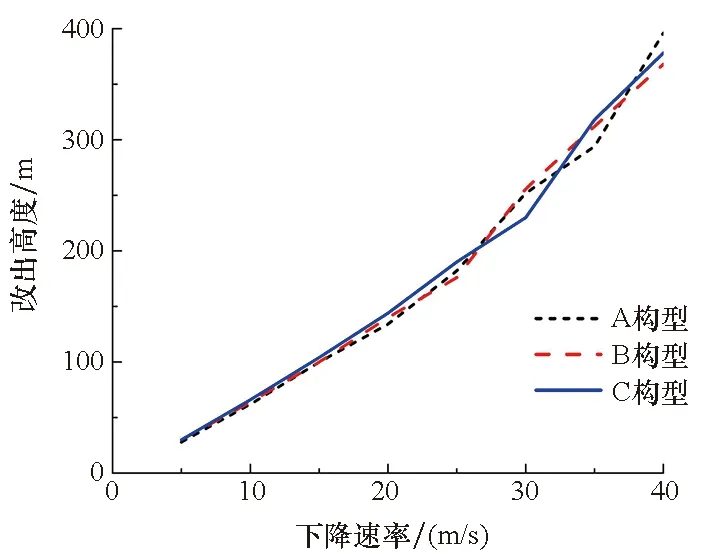
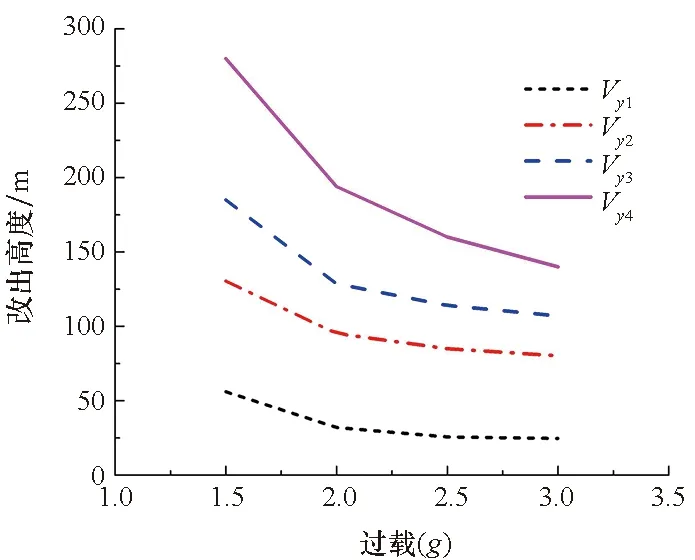
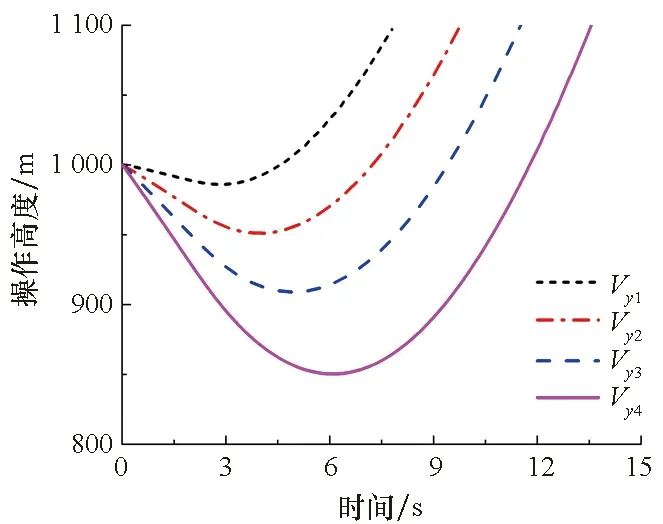
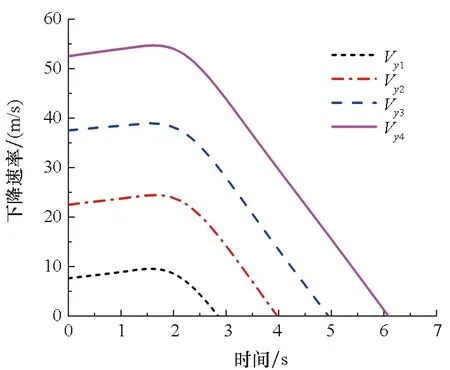
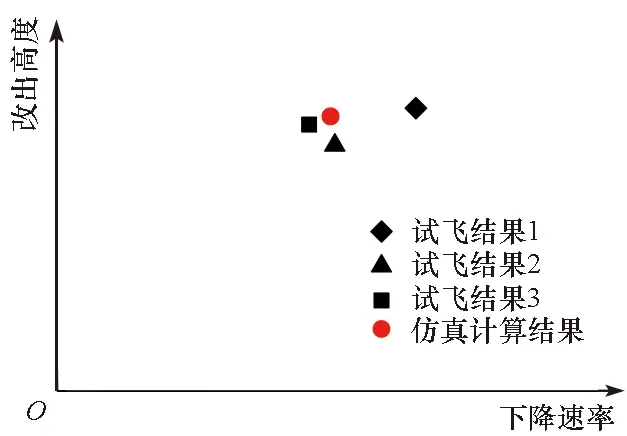
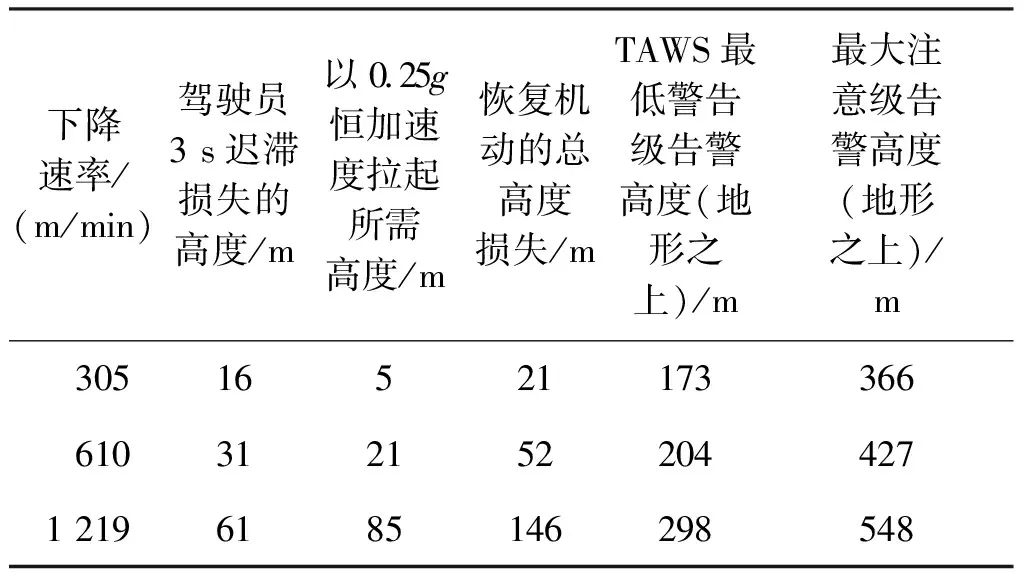
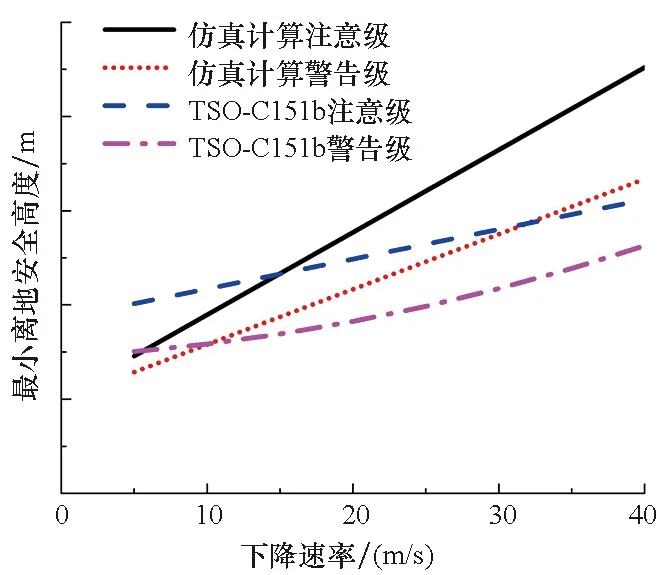
因h1和h3计算公式非常明确,主要针对h2进行仿真模拟。计算飞机在不同的操作高度、构型、重量、过载时,h2随下降速率变化的情况,并对计算结果进行分析。假定下降速率为Vy1~Vy4(Vy1 图5给出飞机在某一构型、过载及重量下,下降速率Vy1~Vy4(Vy1 图5 h2随操作高度变化曲线Fig.5 Variation curve of h2 with operating height 图6 不同构型下h2变化曲线Fig.6 h2 variation curve under different configurations 图7 不同重量下h2变化曲线Fig.7 h2 variation curve under different weight 图8 不同过载下h2变化曲线Fig.8 h2 variation curve under different overload 图9 改出过程中的飞行轨迹曲线Fig.9 Flight trajectory curve during modification 图10 改出过程中的下降速率变化曲线Fig.10 Variation curve of descent rate during modification 计算结果分析: 1)由图5可知,随着下降速率的增大,h2增大;下降速率相同时,飞机拉起到下降速率为0时的高度损失与初始操作高度无关。这是因为在高度1 000 m以下计算,密度基本无变化,损失高度不受操作高度的限制。图中的微小波动是由飞机初始配平状态的细微差异导致的。 2)由图6、图7可知,不同构型同一重量,或者同一构型不同重量,当飞机的下降速率相同时,h2在小下降速率时相同,在大下降速率时有波动,但趋势一致,数量级相差很小,可以认为h2不随构型、重量变化。大下降速率时的波动也是由飞机初始配平状态的不同导致的。这与重量越大改出高度越大的直观理解不同,主要是因为虽然重量或者构型不同,但是设定的拉起过载是确定的,当拉起过载确定时,向上的加速度确定,且由于飞机机械式操作机构的特点,从拉起到下降速率为0的用时较短,损失高度基本相当。这间接表明,在仿真计算时构型、重量的变化对计算结果的影响不大。但不同重量、构型下拉起相同过载时飞行员所受杆力不同,重量越大、外挂构型越复杂则杆力越大。 3)由图8可知,飞机的拉起过载越小,下降速率越大,则所需改出高度越大,且并不是线性变化的,小过载时需要的改出高度更大。由图9、图10可知,随着下降速率的增大,飞机拉起所需的改出高度越大,所需的改出时间越长;改出过程中,下降速率均是先增大后减小,符合实际操作规律。 通过大量的迭代计算结果分析可以得出:飞机在拉升逃逸阶段时,若拉起过载确定时,改出高度只和飞机的下降速率、操作流程有关,与构型、操作高度、重量关系不大;过载不同时,过载越小,需要的改出高度越大。 图11给出在某一下降速率下,模拟仿真计算结果及试验试飞结果[19]对比。可以看出,仿真计算结果大于试飞计算结果,但相差很小,误差在5%左右。这说明模拟仿真计算结果较准确地给出了飞机在大下降速率下的实际高度损失数值,并验证了仿真计算结果的准确性。可以认为本文中给出的告警包线即为该飞机最大下降速率告警模式的包线。 图11 试飞数据与仿真计算结果对比Fig.11 Comparison between flight test data and simulation calculation results TSO-C151b标准中给出飞机在不同下降速率下的告警标准[4]。具体计算原理与仿真计算模型相似,亦是将告警包线分成三段,分别为:飞行员响应时间,最小为3.0 s;拉起恒加速度,为0.25g;最小地形净空值,地平面之上为152 m。三者之和为警告级告警值,注意级告警则是在305 m安全净空基础上加上下降速率的20%。 表1引用TSO-C151b标准,其中列出了在下降速率分别为305 m/min、610 m/min、1 219 m/min时的告警标准,按照其规定的计算方法及原则给出警告级、注意级告警值。 表1 TSO-C151b中的告警标准[4] 按照第2节中计算原理绘制基于飞行仿真的告警包线,按照3.1节绘制以TSO-C151b标准给出的包线,将两者进行对比,如图12所示。明显可以发现,以TSO-C151b标准计算的包线,在小下降速率时大于仿真计算数据,随着下降速率的增大,其值逐渐小于仿真计算结果。因其未考虑飞机的实际气动特性和操纵响应,所得包线并不适用于该型飞机,只能作为参考。 图12 告警包线仿真结果与标准的对比Fig.12 comparison between alarm envelope simulation results and standards 因此,基于安全的考虑,告警包线的绘制应按照本文中给出的计算方式,基于飞行仿真,结合飞机飞行特性,给出合理可行的包线范围,既不过分严格,又能在飞机可达到的边界点告警,保证飞行安全的同时,达到近地后告警的目的。 通过建立飞机的飞行运动模型和轨迹模型,仿真模拟飞机遇到危险时的动态响应及改出过程,高效地实现了近地告警包线的计算。通过实际试飞结果,验证模拟仿真的合理性和正确性。结合与TSO-C151b标准中计算方法对比,进一步说明了本文飞行仿真的必要性和精确性。为飞机的近地告警设备使用提供支撑,保证飞机遇到危险时及时规避危险,确保飞行安全。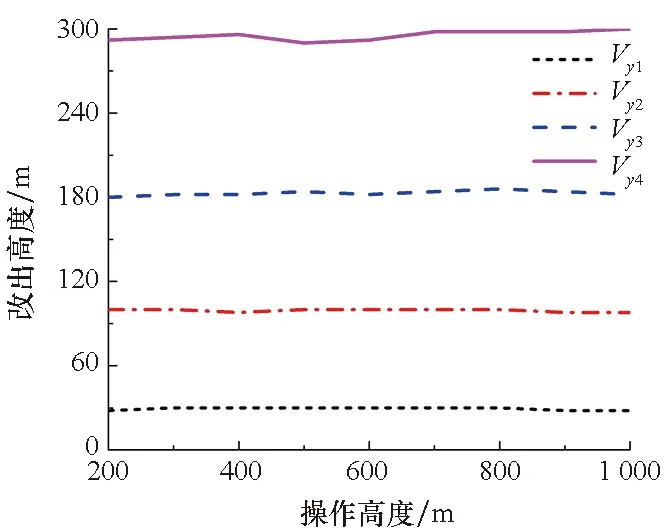

2.3 试飞结果对比
3 仿真告警包线与TSO-C151b包线对比分析
3.1 TSO-C151b告警包线
3.2 两种告警包线对比
4 结论
