ROV推进器非线性控制研究*
2023-06-05闫忠鹏
闫忠鹏
(沈阳化工大学 沈阳 110000)
1 引言
海洋,不仅是人类文明的发祥地,而且蕴藏丰富的资源[1]。ROV 作为其中一种水下机器人,人们能通过它来进行水下作业,例如:海底探索、水下营救、海下工程修复等,它能完成深海环境中高负荷、高压、高精度工作。而ROV 动力系统是整个机器人的核心,控制ROV运动的航速以及转向[2]。水下电动推进器由电机、减速器、螺旋桨和导流罩以及控制电路组成,优点有动力转换效率高、安装便捷、维护方便、高集成度、适用广泛等。而水下电动推进器的控制技术,一直是水下机器人更为重要的关键。本文研究水下推进器以直流电机调速参数为控制,工业上该控制系统一般控制方式多选取PID控制,PID 控制有着适用广泛、算法简单、控制性好、可靠性高等良好条件,多年来在控制领域依然占据重要位置。然而针对水下复杂环境和运动非线性变化,参数不能适时调整,自适应能力差,因此常规PID 控制作为调节器效果并不理想[3]。于是,本文设计提出一种非线性控制方法,加入模糊PID控制器,改善常规PID 的控制精度不足的问题,能够实现PID 参数动态调整,并能够对采集的信息进行实时优化,快速调整稳定系统,保证推进器转速维持在设定的范围中,以解决ROV 推进器电机调速系统的控制问题。
2 非线性控制系统设计
2.1 原理分析
PID,比例-积分-微分控制器,从诞生至今依旧广泛运用于工业控制中。PID 控制器通过计算期望值与测量值之间的差值,并用比例(P)、积分(I)以及微分(D)三个参数来进行校正[4]。PID属于线性控制算法,通过定义计算设定值与实际值之差有以下表达式:
e(t)=r(t)-y(t)
现实生活中,被控对象并非是线性时不变系统,对于常规的PID 只是一个线性控制器,然而模糊控制能解决被控对象的非线性问题,它结合PID控制能动态的调整参数。设计一个模糊PID 控制器,它通过模糊算法结合PID 算法,达到参数自整定的控制应用[5]。模糊PID 控制器主要通过PID 控制器、模糊控制器以及输入输出四个部分构成,通过模糊值来提高模糊控制器的稳定度[6~7]。基于ROV 推进器电机,模糊控制器输入端以转速误差e以及误差变化率ec为接口,按照模糊知识库对PID参数Kp、Ki、Kd 三个参数在不同时间进行调整,使得推机器电机保持在良好的动态以及静态的稳定下,最终获得模糊PID控制器的结构如图1所示。
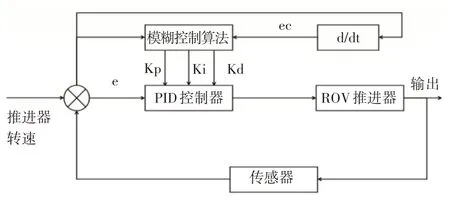
图1 模糊PID控制器结构
2.2 控制器的设计
根据水下航行器模糊规则,水下航行器运动误差和误差变化率可以相互关联以产生其它变量,即模糊PID控制器输出Kp、Ki和Kd。
1)设定e(期望转速与实际转速值之差)以及ec(误差变化率)为模糊控制器输入值,选择Kp、Ki、Kd为控制器的输出端[8]。
2)将输入以及输出量模糊化处理,首先将输入量e、ec 划分为7 个模糊子集,分别为正大(PB)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负小(NM)、负大(NB)。同时将输出量Kp、Ki、Kd 设定为相同的5 个模糊子集,对应的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。根据专家经验或者操作人员实践,ROV 推进器电机一般选择三角形隶属度函数如下公式(以误差e 为例)来作为误差以及误差变化率的隶属度函数。这种函数的优点主要是结构简单并且易于计算,而且在编程中也利于实现[9~10]。
3)模糊关系,通过模糊推理以及实验数据,于是建立比例Kp 的模糊规则控制表如表1、Ki 模糊控制规则表2以及Kd模糊控制规则表3。当误差e是正大、误差变化率ec 是正大的时候,反向加大比例项KP 以增快调节来较小上升的时间;当误差是正值时,误差变化率是负数的时候,应当降低比例项以防超调的情况发生;当误差是负大时以及误差变化率是正时,需要增大比例量;当误差以及误差变化率都是正数时,需要减小比例项防止出现大的误差[11~12]。
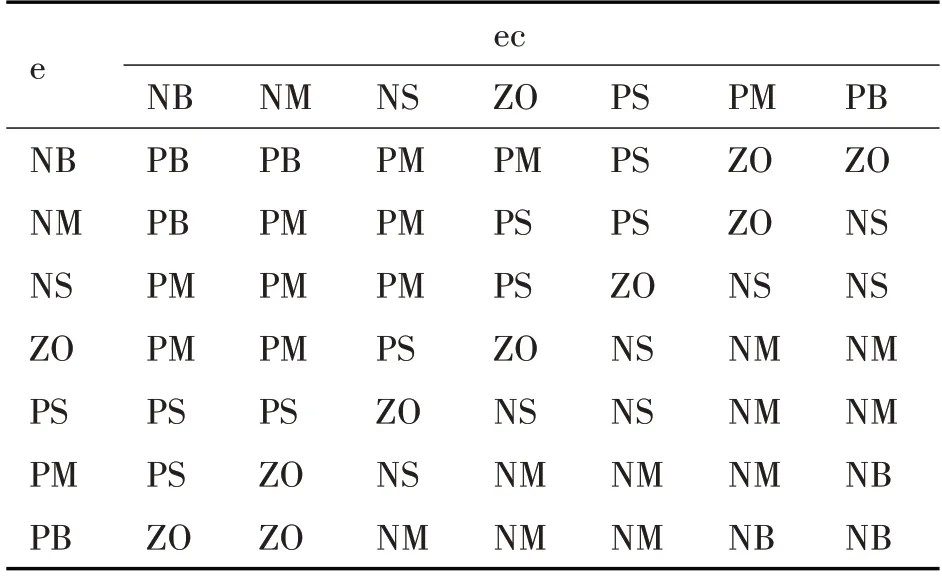
表1 Kp模糊控制规则表
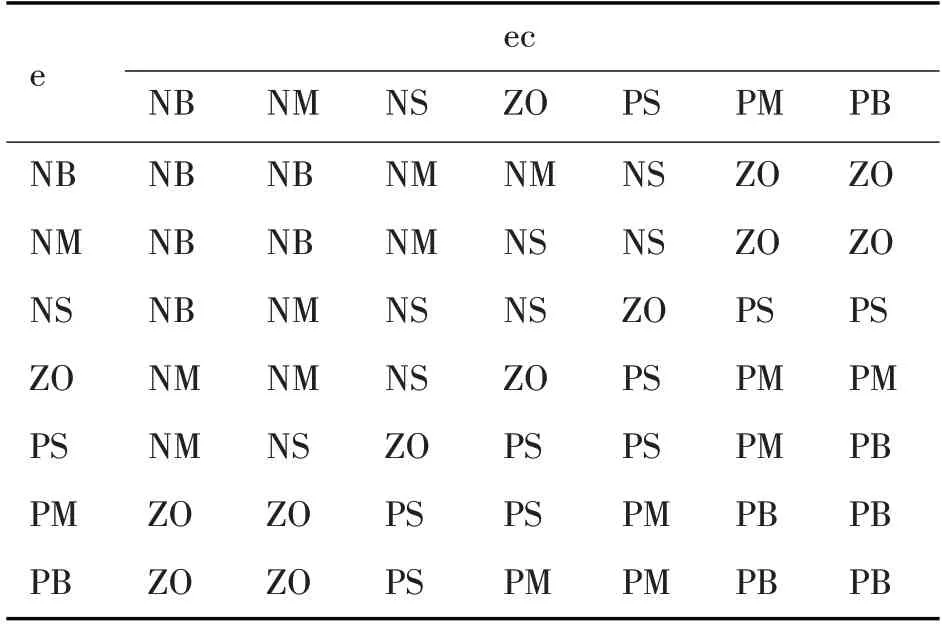
表2 Ki模糊控制规则表
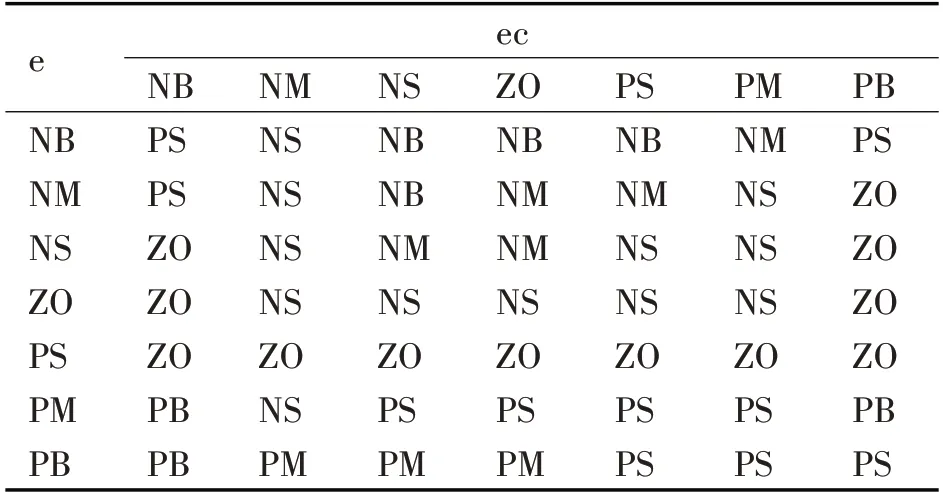
表3 Kd模糊控制规则表
3 系统建模
本文研究以ROV 推进器HPM153-1 型电动推进器为实验对象,因此建立其数学模型。
1)ROV 推进器以无刷直流电机为主体,研究以推进器电机转速调制,无刷直流电机无论换相机制多么复杂,电压是控制电机转速的主要因素,所以可建立以下推导:
公式定义:n 表示为电机转速;Ud表示为电机额定的电压;Id定义为电机额定的电流;Ra表示电枢电阻;公式中P电机为额定功率;ce为额定磁通下的电动势系数。
接下来对电枢电流与电磁转矩函数,电机的反电动势与电机转速,负载转矩定义如下:
该公式参数定义:Te表示为电磁转矩;Cm表示为转矩系数;其中E 为电机的反电动势。TL是负载转矩;GD2是飞轮惯量(GD2=4gJ;J为转动惯量)。
2)建立传递函数模型如下:
(3)电动势与转速的关系为
由此得到推进器电机系统传递函数如下:
完成对数学模型一系列推到,于是建立系统传递函数模型如图2。
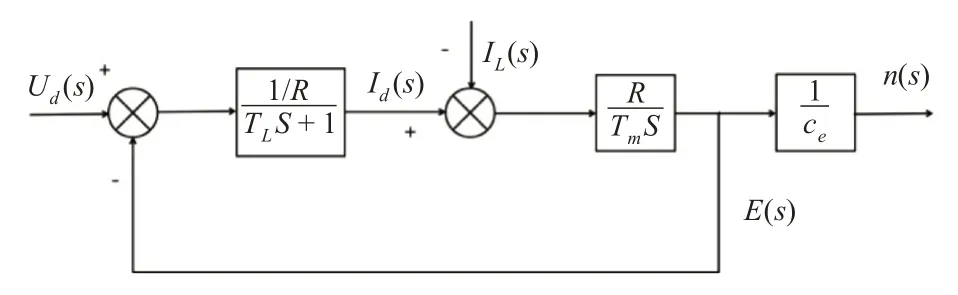
图2 系统传递函数模型
4 基于Matlab非线性控制系统仿真
4.1 模糊控制器Matlab设计
当设计好模糊控制器后,通过Matlab软件进行仿真实验测试。模糊控制器采用Matlab 的模糊逻辑控制箱功能(Fuzzy)进行仿真操作。首先打开Matlab 软件,在命令行输入“fuzzy”,将自动弹出一个模糊控制器设计页面FIS,然后添加三个输入量、两个输出、选择合适的隶属度函数[13]。
其次点击规则编辑器,按照第三节Kp,Ki,Kd的模糊控制规则表将其转换成编辑器所用的关系语句,例如:
If(e is NB)and(ec is NB)then(Kp is PB)and(Ki is PB)and(Kd is PB);
…(省47)
If(e is PB)and(ec is PS)then(Kp is NB)and(Ki is PB)and(Kd is PS)
4.2 控制系统仿真
本文研究以ROV 推进器HPM153-1 型电动推进器为实验对象,旨在通过对ROV 推进器电机实施有效控制来提升ROV运动性能。
为了证实ROV 推进器电机控制方法的有效性,以Matlab-Simulink软件为实验平台搭建非线性系统控制仿真模型,如图3所示。
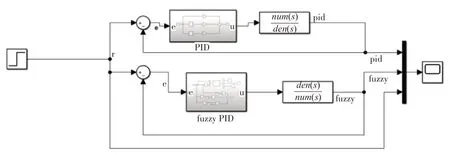
图3 非线性控制系统模型
1)控制性能比较
仿真搭建好之后测试,首先设置仿真时间为0.3s,设定转速为1.0Krpm,在单PID 控制环节设定参数p=6,i=0.4,d=0.8。PID与模糊PID仿真控制性能图如图4所示。
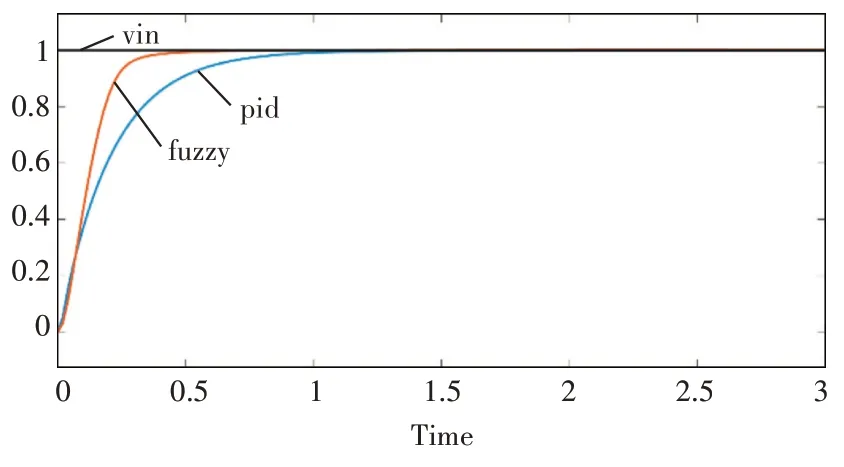
图4 控制性能对比图
2)抗干扰性能比较
为了测试该方法在出现干扰的情况下稳定性。在0.1s时刻加入一个阶跃信号,将转速骤升至1.2Krpm,如图5所示。
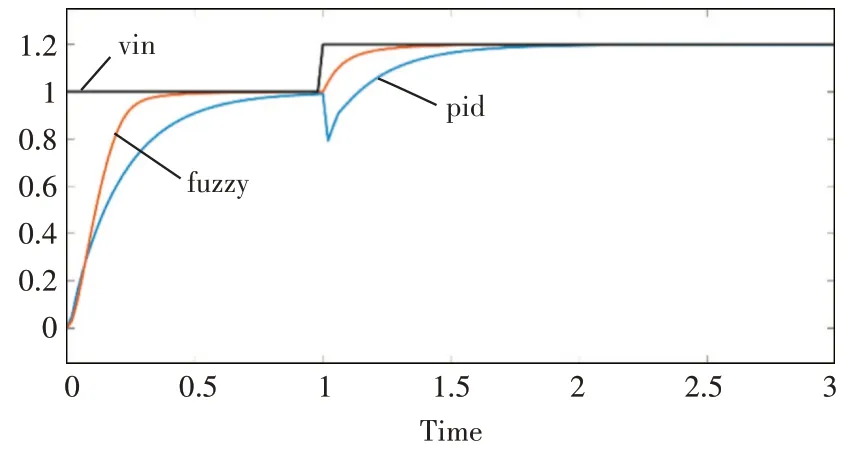
图5 抗干扰性能对比图
由图4和图5可以直观地看出,在推进器电机控制上模糊PID 控制时间明显要短于单PID 控制,并且在0.1s 时刻加入干扰信号,常规单PID 控制转速有所回落,而加了模糊控制明显能抗干扰。综上所诉,模糊PID 控制相比较于常规的PID 控制器,ROV 推进器电机转速能更好地响应速度,动态性能优越,并且在超调量上能显著的改善,使得该系统达到稳定的时间明显要缩短,并且模糊PID 控制有比较好的抗干扰能力。
5 结语
ROV 对于探索海洋有着十分重要的意义,因此提升ROV 推进器的控制性能非常关键,而对于ROV 推进器转速这一参数,本文提出设计这一非线性控制系统。其目的在于通过转速控制将推进器分配输出推力与实际输出推力一一对应。
1)单PID 控制在遇到非线性、时变、耦合的被控对象时,出现了超调量大、不稳定、过渡时间较长的缺点,而对比来说模糊PID 控制能克服这一不足,控制效果明显优于它。
2)通过建立ROV 电动推进器电机控制系统的PID 控制与模糊控制数学模型,使得推进器可以更好地适应复杂的水下环境,并且通过动态调整推进器电机转速,改善了ROV 的运动情况,优化了ROV的适应性。
3)通过仿真软件实验可知ROV 电动推进器电机转速控制响应曲线,对响应曲线分析,对控制对象有很好的调节,为推机器控制对象优化给予支持。
