智能消毒机器人小车的设计与研究
2023-06-03张国栋孙钊缪也曹梦琪孙奥奇
张国栋 孙钊 缪也 曹梦琪 孙奥奇

关键词:消毒防疫;智能消毒机器人;STM32;避障模块
中图分类号:TP311 文献标识码:A
文章編号:1009-3044(2023)10-0032-03
0 引言
疫情防控是打赢新冠疫情重要堡垒,随着疫情防控进入常态化形势,疫情防控的推进[1],现有人员在对各个地方的疫情防控工作十分重视,但疫情防控是持久战,亟须防疫机器人的辅助。而防控消毒尤为重要,国内疫情消毒方式主要采用人工消毒,工作的过程中还可能会发生感染并且进行病毒传播的可能性。国内外在疫情期间高度重视消毒机器人研发[2],目前,此行业对提升智能消毒机器人消毒效率及质量投入大量人力和资金。针对疫情防控期间消毒工作情况,本课题小组设计一款智能消毒机器人小车,通过上位机操作控制可以高效精准地执行系统设定的路径和任务,自主进行消毒防疫工作。各个模块共同作用实现无人化、智能测温、智能远程操作的智能消毒机器人小车,从而缓解防疫人员的工作压力,提高人力资源的利用,有效地阻止了病毒的传播,降低交叉感染的风险,保障了人民的日常生活[3]。
1 软件系统设计
以STM32F103C8T6 单片机为核心通过远程操作进行智能无人车的控制,并且通过视觉识别机构收集智能车周围的环境信息[4],并用上位机进行下一步操作,智能车根据操作者发出指令进行命令执行,从而实现智能无人化控制。
1.1 系统模块
系统模块主要包括电源模块、驱动模块、紫外线消毒液消毒模块、传感器模块、路线规划模块、超声红外避障模块、控制器模块等来实现智能小车的组成。如图1所示。
1.2 电源模块
如智能消毒机器人小车系统框图所示,为满足智能消毒机器人小车在不同场所进行正常工作,供电方式采用可便携拆装的磷酸铁锂电池,这种新能源电池的特点是拥有长时间的巡航能力而且不会对环境造成污染的绿色电池。
1.3 超声波避障功能模块
根据超声波测距原理,只需知道发射器发射和接收器接收之间的时间差,便可以得出障碍物实际距离是速度乘以二者时间差的一半[5]。
根据上述原理进行程序设定,每接收五次回响信号进行平均值计算,得出的数值为测试距离,往复循环。得到的测试距离与预设距离进行对比,预设距离不得超过0.25米。根据指令小车会执行相应命令。
避障流程代码说明如下:
if(distanceqian1<25)//如果左前方超声波判断距离小于25
{
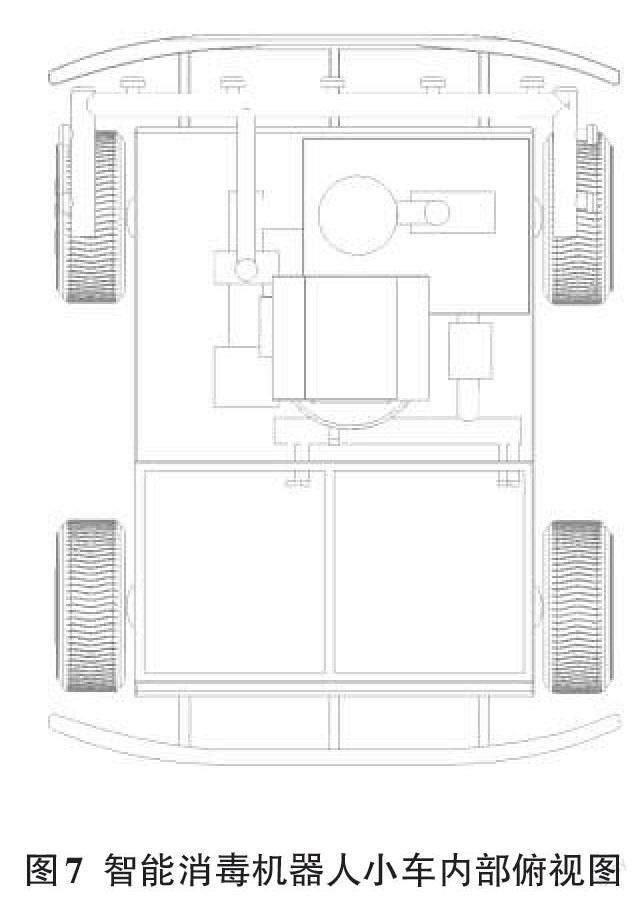
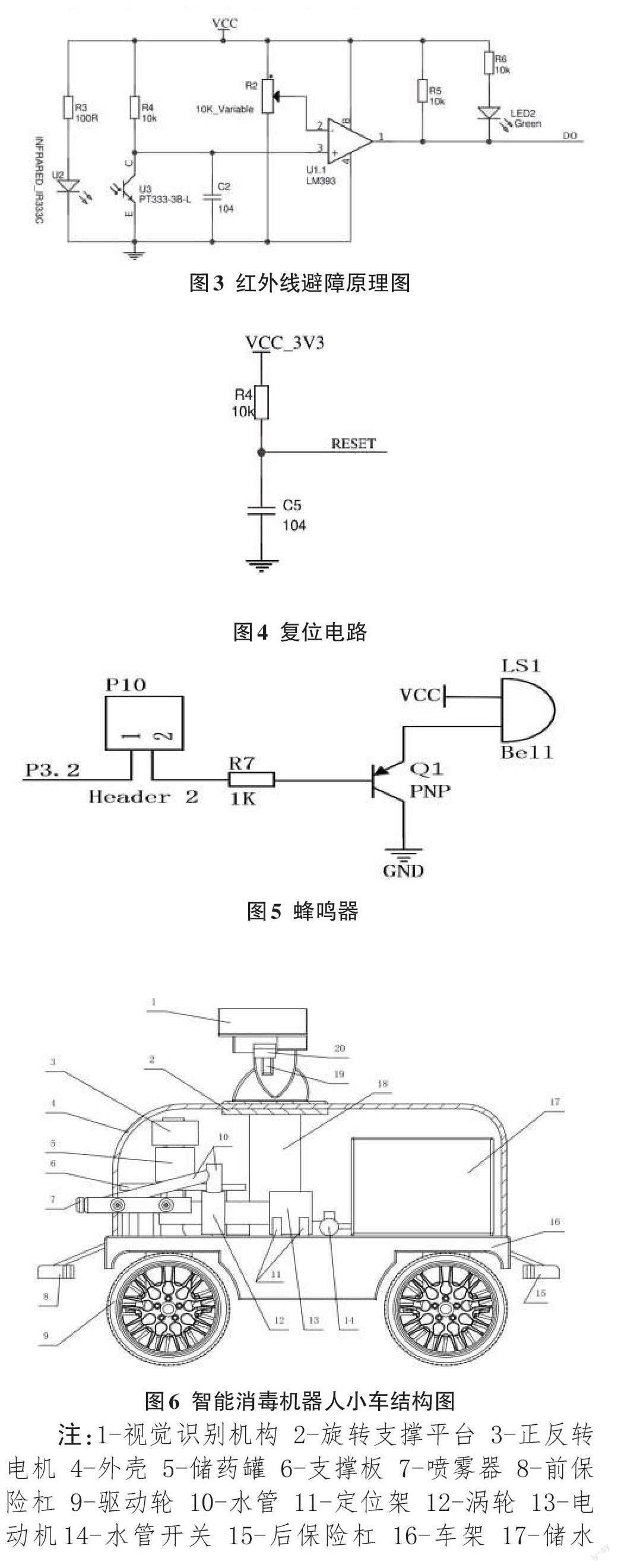
if(distancezuo { youhou(); delay(750); //向右后方行驶750毫秒 youxuan(); delay(300); //右旋300毫秒 } else if(distancezuo>distanceyou)//2 若左侧距离比右侧距离空旷 { zuohou(); delay(750);//向左后方行驶750毫秒 zuoxuan(); delay(300);//左旋300毫秒 } else if(distancezuo==distanceyou)//3若左右距离相等(左右两边在传感器识别范围内都无障碍物) { if(distanceqian1>distanceqian2)//4若左前方距离大于右前方距离 { daoche(); delay(500);//后退500毫秒 youxuan(); delay(300);//右旋300毫秒 } 1.4 红外线避障功能模块 红外线避障主要利用三角测距的原理、时间差法测距原理[6],采用EDA技术汇总A/D转换电路、电源输入电路、复位电路、蜂鸣器等设计组成。见下图。 2 智能消毒机器人小车机械设计 智能消毒机器人小车是由驱动机构、喷雾机构、消毒液定量输送机构和喷雾器机构组成。喷雾机构包括过滤器、水管、涡轮、电动机、喷雾器。过滤器除去水中的杂质,涡轮旋转吸水,再将水通过水管传送到喷雾器,水经过喷雾器,雾化洒落到小车周围。消毒液定量输送机构由电动机、水管、储药管、电动机、控制开关构成;控制开关包括正转按钮、旋转按钮、反转按钮、和停止按钮。该机构与喷雾机构结合,水与消毒液在涡轮的旋转下充分均匀混合后再到达喷雾器处。 2.1 视觉识别机构的结构设计 视觉识别机构是由摄像机构和传动机构组成,摄像机构由红外线测距仪、超声波测距仪、第一转轴、第二转轴、节能灯和扬声器组成。第一转轴25的两端通过轴承24分别设置在两个预留的孔洞上,负责视觉识别机构竖直方向的旋转工作,第二转轴26与小车支撑柱18柱内装置结合,负责视觉识别机构水平方向的旋转工作。工作人员可以通过控制器屏幕观察到视觉识别机构捕捉到的画面从而可以进行下一步的远程控制工作。 2.2 工作原理 操作人员可根据消毒区域路况通过远程遥控进行移动,达到指定位置后,根据需要设定一定浓度的消毒液放到储药罐5里,然后调整旋转输出按钮,在显示屏上按下电动机13开关和正反转电动机3开关的正转按钮,这时,储水罐17里的水通过涡轮12旋转的作用,经过过滤器到达储药罐5上水管,同时消毒液通过输出水管到达上水管处。消毒液和水混合同时到达涡轮12,在涡轮旋转的作用下,消毒液与水更加充分均匀的混合,通过涡轮的水管10到达喷雾器7,水和消毒液的混合物经过喷雾器雾化喷出,从而喷落到车前方以及车两侧。紫外线消毒装置嵌入式的方式安装在智能车两侧进行消毒作业。 3 结束语 综上所述,智能消毒机器人小车使用STM32为主控制器,通过各智能模块共同作用能有效地在医院、商场、社区、车站、机场等复杂场所以及人员密集的公共场所进行消毒作业。系统设计目前还在完善,各个模块也在不断改进。智能机器人的发展不断进步,各种消毒机器人不断创新与改进,相信不久后智能消毒机器人会逐步亮相并服务于各行各业中去[7]。
