基于横纵向MPC的智能车换道控制算法
2023-05-31孙志伟
孙志伟,李 聪
(上海工程技术大学机械与汽车工程学院,上海 201620)
1 引言
轨迹跟踪控制是智能车辆[1]研究领域的热点之一。轨迹跟踪是指通过控制车辆转向,使得车辆可以按照事先给定的参考轨迹的路线行驶[2]。
在跟踪控制方面,其算法主要有滑模控制、模糊控制、鲁棒控制和模型预测控制等。文献[3]将增益调度、共享以及鲁棒性结合起来设计出一种控制器来进行轨迹的跟踪控制。文献[4]提出的滑膜综合控制器可以降低建模的不确定性和扰动时的鲁棒性。文献[5]利用神经网络的自学习和自调整特性,并结合模糊控制,设计了一种轨迹跟踪控制器。文献[6]针对实际交通环境下目标车道车速和加速度的动态变化,提出了基于轨迹预瞄的智能汽车变道动态跟踪控制策略。而MPC算法相比于其它控制算法来说,最大的优势是可以把多种约束添加到控制过程中,从而提高轨迹的跟踪精度。文献[7]利用MPC设计了一种主动转向控制器,使智能车辆在满足约束条件的情况下对参考的期望轨迹进行跟踪。文献[8]提出了一种轨迹规划和跟踪能在一个MPC优化问题中得到,实现了基于MPC算法的同步轨迹规划与跟踪。文献[9]提出了一种基于MPC的新型路径跟踪框架,是一个多层控制系统,包括三个具有固定速度的路径跟踪控制器和一个速度决策控制器,可以根据路径信息主动调整纵向速度,且有良好的跟踪精度。文献[10]提出一种基于自适应模型预测控制的轨迹跟踪控制算法,能够提高低附着且变速条件下智能车辆轨迹跟踪控制精度和稳定性。文献[11]提出将侧偏角软约束与线性时变模型预测控制算法相结合,从而保证了车辆的稳定性,并且较好的实现了轨迹跟踪。文献[12]在线性变参数模型预测控制中综合考虑纵向和横向动力学,并且引入终端集概念,从而保证系统的稳定性。
本文将五次多项式作为智能车辆的换道轨迹,以前轮转角和加速度补偿作为控制量,将车辆的横纵向控制与模型预测控制算法相结合,设计出一个整体的轨迹跟踪控制器用于跟踪参考的换道轨迹,并通过Carsim与MATLAB/Simulink联合仿真对其进行验证,并且比较了加入纵向控制与不加纵向控制的跟踪控制精度的差异。
2 模型的建立
2.1 车辆动力学模型
对于车辆动力学建模时的理想化假设:1)车辆在平坦路面上行驶,忽略车辆垂向运动;2)悬架系统及车辆是刚性的;3)只考虑纯侧偏轮胎特性,忽略轮胎力的纵横向耦合关系;4)用自行车模型来描述车辆运动,不考虑载荷的左右转移;5)假设车辆行驶速度变化缓慢,忽略前后轴的载荷转移;6)忽略纵向和横向空气动力学。
基于上述假设,建立的车辆动力学模型如图1。
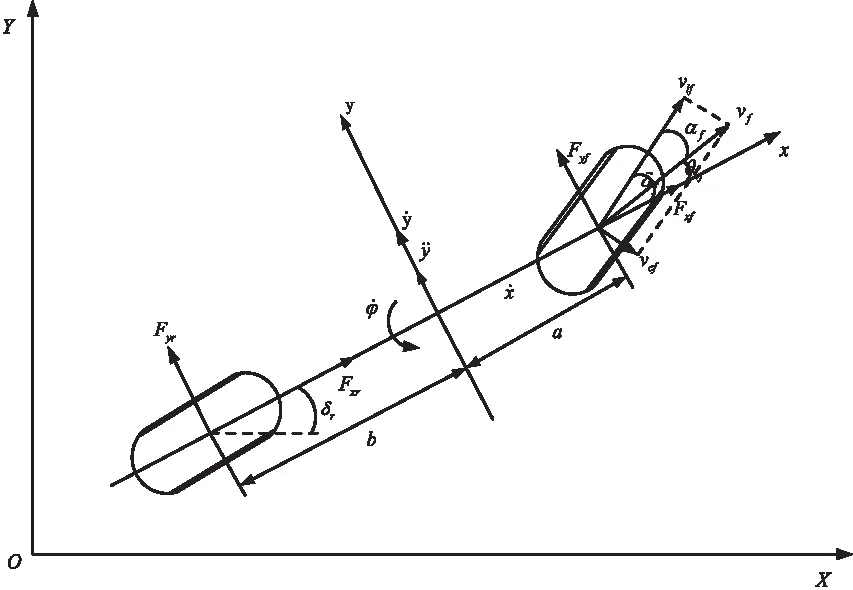
图1 车辆动力学模型
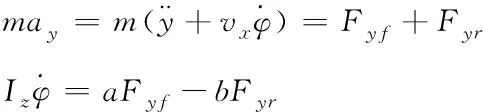
结合图2以及根据牛顿第二定律,分别沿y轴和z轴作受力分析,可得如下的车辆横向动力学模型
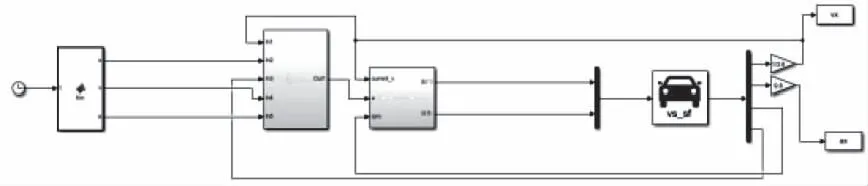
图2 纵向控制
(1)
其中,Fxf,Fxr为地面给前轮胎和后轮胎施加的纵向力;Fyf,Fyr为地面给前轮胎和后轮施加的横向力;a表示前轴长度;b表示后轴长度;δf表示前轮转角;m为整车质量,Iz为车辆绕z轴转动的转动惯量。
考虑轮胎的侧偏特性
Fyf=2Cfαf
Fyr=2Crαr
(2)

将上式代入车辆动力学方程得
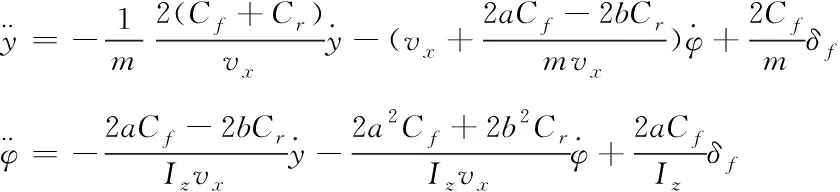
(3)
化为矩阵形式

(4)
其状态变量和控制变量分别为
各个状态量表示的含义分别为横向位置、横向位置变化率、横摆角以及横摆角变化率。
根据式(4)就可以分析出在给定的前轮转角输入下,车辆的横向位移、横向速度、横摆角以及横摆角速度的响应,但是横向跟踪控制的目的是减小跟踪偏差,需要的状态方程是能够分析给定的前轮转角下车辆跟踪偏差的响应。因此,可以建立基于误差的动力学模型。假设e1为横向误差,即车辆质心距车道线的距离;e2为航向误差,车辆纵向速度为vx,车辆转弯半径为R,结合图1,可得:
e2=φ-φdes
(5e)

将式(5)与式(3)结合,可得到车辆的横向误差动力学模型:
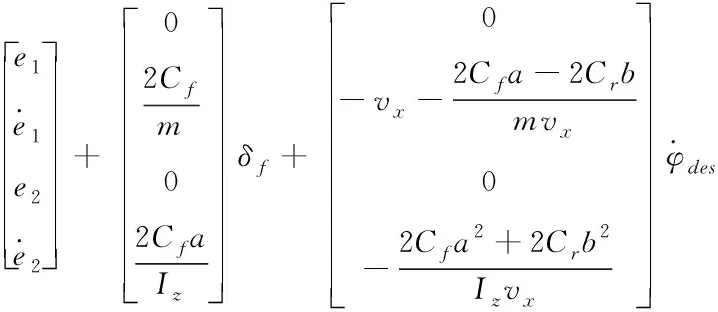
(6)
2.2 纵向速度控制
智能车辆在规划变道时,保持纵向方向速度恒定不变,那么在变道过程中,由于换道时会产生横向速度,此时智能车辆的合速度大于原来直行时的速度,这就会导致横向控制看起来能够跟踪期望轨迹,但是在时间上会落后期望轨迹,因此引入纵向控制[13]。纵向控制主要为速度控制,通过刹车、油门、挡位等实现对车速的控制。本文采用的车辆为自动挡,因此控制对象为刹车和油门。基于此本文搭建了基于MATLAB/Simulink和Carsim联合仿真的纵向速度控制结构图,如图2。
在纵向控制中,纵向误差的计算是其算法实现的核心。纵向误差包含两个状态量,即速度误差ev和位置误差es。原理图如图3。
由图3可知,位置误差和速度误差分别为:
es=-(dx*cosθdes+dy*sinθdes)
ev=Vxdes-Vx*cos Δθ/k
(7)
3 轨迹跟踪控制
3.1 轨迹跟踪控制框架
轨迹跟踪控制器主要由两部分组成: MPC控制器以及Carsim车辆模型。MPC控制器是实现轨迹跟踪控制的核心,具有模型预测、滚动优化和反馈矫正三个特点。所设计的MPC控制器是将车辆的横向控制和纵向控制结合在一起,通过求解得到最优的控制量前轮转角δf和加速度a,并将其输入到Carsim车辆模型中,得到车辆当前的状态,作为预测模型的输入,然后重复上述过程,最终实现轨迹跟踪。框架图如图4。
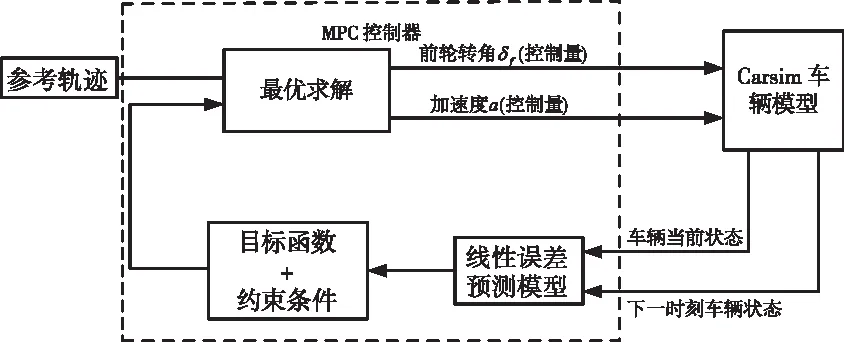
图4 基于横纵向控制MPC轨迹跟踪控制器
3.2 横纵向MPC控制器设计
3.2.1 线性误差模型的建立
由于无论是运动学模型还是动力学模型,均为非线性系统,而线性模型预测控制比非线性模型预测控制有更好的实时性,且更易于分析和计算,为此本文采用近似的线性化方法对非线性系统进行线性化。
假设车辆参考系统在任意时刻的状态量和控制量满足如下方程
(8)
但式(8)并不适合模型预测控制器的设计,需要对其进行线性化和离散化处理。
线性时变和离散化处理后的线性化时变模型为:

(9)

结合横向误差动力学模型以及纵向控制模型对车辆的运动状态进行分析。并以横向误差(lateral_error)、横向误差率(lateral_error_rate)、航向角误差(heading_error)、航向角误差率(heading_error_rate)、位置误差(station_error)以及速度误差(speed_error)作为状态量。即:
以前轮转角δf和加速度补偿a作为控制量
结合横向误差动力学模型(式(6))以及纵向误差控制模型(式(7)),可得基于横纵向的MPC控制模型为:
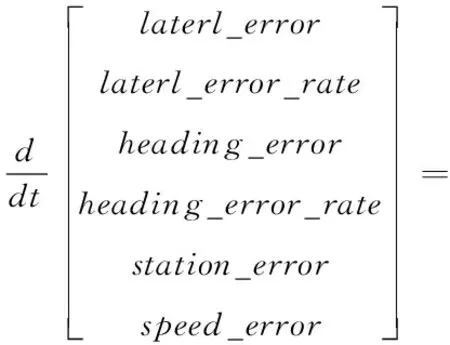
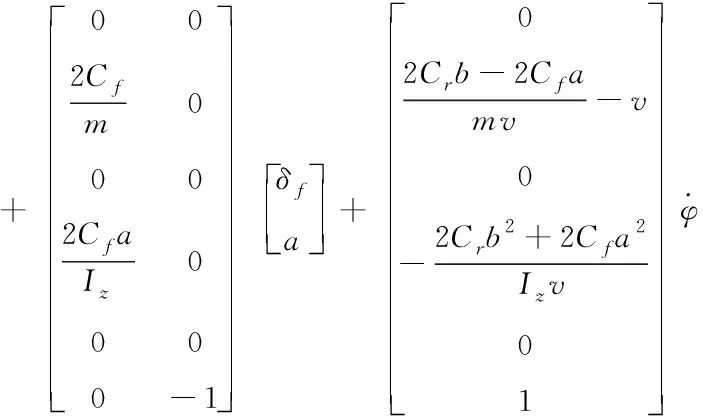
(10)
对应的状态矩阵、控制矩阵、扰动矩阵分别为
对应的线性化系数应为
Ak,t=I+TA,Bk,t=TB,Ck,t=TC
最终得到的离散线性公式为

(11)
系统的输出方程为
y(k)=Dk,tx(k)
(12)
3.2.2 目标函数设计
目标函数要能够保证车辆快速平稳地追踪上期望轨迹。因此,需要加入对系统状态变量的偏差和控制量的优化。在设计轨迹跟踪控制器时,采用如下形式的目标函数

(13)
其中,N为预测时域,Q,R为权重矩阵,且满足Q≥0,R>0的正定矩阵。
为了避免被控系统控制量突变的现象,从而保证控制量的连续性,在式(13)中添加约束,将目标函数转化为如下形式:
J(ξ(t),u(t-1),ΔU(t))=

(14)

(15)
其中
将系统未来时刻的状态和输出以矩阵形式表达为
X(t)=ψtξ(t|t)+φtΔU(t|t)+γt

(16)
其中
预测时域内输出量偏差表示为
E(t)=ψtξ(t|t)-Yref(t)
(17)

将式(16)、式(17)代入式(14),从而将目标函数调整为与控制量相关的函数
J(ξ(t),u(t-1),ΔU(t))
=ΔU(t)HtΔU(t)T+GtΔU(t)T+Pt
(18)
其中,Ht=φTQeφ+Re,Gt=2E(t)TQeφ,Pt=E(t)TQeE(t),Pt为常量,Qe,Re为权重矩阵Q,R的扩充矩阵。
3.2.3 约束条件设计
本文主要考虑控制过程中的控制量极限约束和控制增量约束,控制量表达形式为

(19)
控制增量约束表达形式为
ΔUmin≤ΔUt(k)≤ΔUmax
(20)
结合式(16)、(17)以及(18),优化问题求解可表达如下
(21)
在每一个控制周期内,根据式(21)完成优化求解后,得到控制时域内的一系列控制增量

(22)
将序列中的第一个控制量作为实际的控制输入增量作用于系统,则有

(23)
将u(t)作为此时的控制量输入给系统,直到下一个控制时刻,系统根据新的状态信息预测下一时段内的输出,然后通过优化得到一组新的控制序列。如此反复,直至完成整个控制过程。
4 仿真结果及分析
仿真中的车辆模型采用Carsim中的车辆模型,具体参数见表1。

表1 整车参数
MPC控制器中的部分参数设置见表2。

表2 控制器参数
4.1 不同车速情况下的仿真
为了验证所提出的基于MPC的轨迹规划与跟踪控制器的性能,在摩擦系数为μ=0.85的沥青路面上进行变道跟踪控制的模拟仿真。在这个场景中,智能车分别以36km/h、72km/h以及108km/h的恒定速度进行换道。仿真结果如图5,图6以及图7。

图5 36 km/h工况下的跟踪控制仿真图
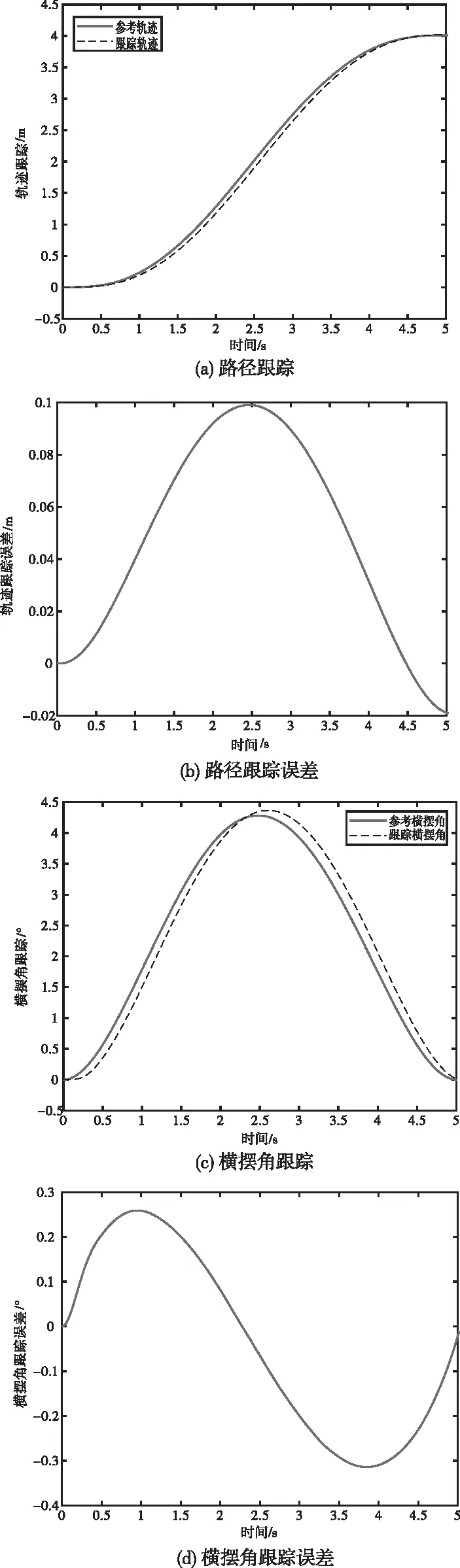
图6 72 km/h工况下的跟踪控制仿真图

图7 108 km/h工况的跟踪控制仿真
从图5(a)、5(b)、6(a)、6(b)、7(a)和7(b)可以看出在良好的路面附着下控制器轨迹跟踪效果良好。在速度为36km/h的仿真中实际轨迹几乎与参考轨迹重合,控制器在低速良好路面的跟踪效果非常良好。在108km/h的仿真工况下,实际轨迹与参考轨迹偏差比36km/h和72km/h的偏差略大,这是因为高速下车辆的转向过于灵敏所致。在72km/h的工况下仿真效果也比较良好。但三种工况的偏差都在控制器阈值范围内,由此可知在低中高三种车速仿真下,控制器均能精确的跟踪参考轨迹。
从图5(c)、5(d)、6(c)、6(d)、7(c)和7(d)可以看出在良好的路面附着下本文所设计的控制器能够比较准确的跟踪参考的横摆角。由于随着车速的增高,完成换道所需的最大优化方向盘转角越小,这是因为转向比随速度的增加而减小,所以横摆角跟踪误差的最大值随速度的增加而减小,且不同车速下的误差最大值均未超出控制器设置的阈值。
4.2 雨雪路面车辆轨迹跟踪
为了验证轨迹跟踪控制器的鲁棒性,本文在摩擦系数为0.2的冰雪路面以及0.3小雨路面条件下进行轨迹跟踪仿真测试。仿真情况如图7和图8。
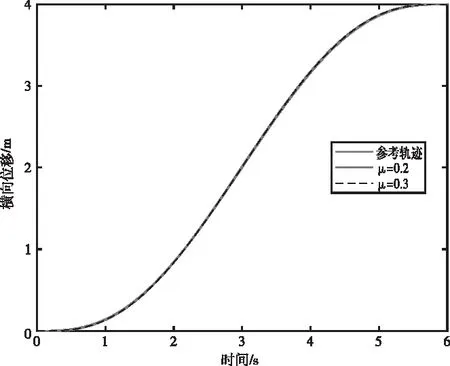
图8 36 km/h工况低路面附着系数
如图8所示,当车速为36km/h时,车辆在雨雪路面均能实现轨迹跟踪控制,且跟踪效果良好,跟踪轨迹误差最大不超过0.03m。由轮胎的侧偏特性图可知,此时车辆轮胎的前后侧偏角保持在线性区之内,从而保证了地面能给轮胎提供足够的侧向力,特别是在转弯时地面能够提供轮胎足够的向心力。
如图9所示,当车辆以108km/h的速度进行换道时,车辆仍能对轨迹进行跟踪,但跟踪误差明显变大,这是由于速度过高,轮胎的前轮侧偏角处于轮胎侧偏特性图的饱和区,此时地面不能给轮胎提供转弯时所需的向心力,使车辆前轴发生侧偏,偏离参考轨迹。

图9 108 km/h工况低路面附着系数
4.3 控制器的对比分析
为了验证所设计的轨迹跟踪控制器的精确性,将其与未添加纵向控制的轨迹跟踪控制器在速度为100km/h和摩擦系数μ=0.85的条件下进行比较分析,仿真结果如图10。
对最大偏差进行对比分析,见表3。

表3 控制器对比
由图10和表3可知,当车速为100km/h时,二者横摆角相差不大,都具有良好的行驶稳定性;横纵向MPC和横向MPC均能进行轨迹跟踪,但是横纵向MPC跟踪的最大横向偏差比横向MPC减小了0.022m,说明横向跟踪精度有所提高,说明其有更好的跟踪精确性。
5 结束语
针对智能车辆换道安全控制问题,设计出横纵向MPC的模型预测控制器对智能车辆的参考轨迹进行轨迹跟踪控制,使得智能车辆能够有效、安全的完成换道任务,并且通过MATLAB/Simulink和Carsim的联合仿真,验证所设计的控制器的可行性与鲁棒性,并与未添加纵向控制的控制器进行对比分析,验证了该算法适用于对智能车辆换道行为跟踪控制,与未添加纵向控制的控制器相比其横向跟踪误差更小,跟踪精度更高。