机器人关键控制系统设计
2023-05-23李海军石淑妮
李海军 石淑妮


作者简介:李海军(1982— ),男,甘肃正宁人,讲师,学士;研究方向:电气工程。
*通信作者:石淑妮(1988— ),女,甘肃正宁人,二级教师,本科;研究方向:电气工程。
摘要:机器人技术是一种综合了多门学科知识的混合性新技术,涵盖了机械、电子、电气、计算机、通信等多门学科。机器人技术作为21世纪最先进的技术之一,它的发展必然会给社会带来深远的影响。为了保证机器人正常完成各种工作任务,硬件设施和软件系统必须相辅相成。机器人控制系统是机器人控制的核心,是决定机器人功能和性能的主要因素,其重要性不言而喻。基于此,文章对机器人关键控制系统进行了设计。
关键词:机器人技术;机器人控制;机器人控制系统
中图分类号:TP18 文献标志码:A
0 引言
机器人的发展非常迅速,机器人技术是一种综合了多门学科知识的混合性新技术,涵盖了机械、电子、电气、计算机、通信等多门学科。诞生于20世纪40年代的现代机器人技术,不仅发展速度快,而且应用面广,主要集中在机械加工生产、科学研究、国防科技、智能制造、无人驾驶、5G技术、航空航天、日常生活等方面。机器人技术对人们的生产生活产生了巨大的影响,掀起了一场技术革命,已经成为生活和生产中不可或缺的生产力,尤其是近几年机器人技术的快速发展,带动了人工智能技术的快速崛起,而人工智能技术的广泛应用,改变了人们传统的生活方式,推动了社会的进步和发展[1]。
工业机器人控制技术起源于传统的自动控制技术,机器人由于本身具有独特的自动控制特性,所以对控制系统提出了新的要求。
1 工业机器人的需求背景
工业机器人经过几十年的发展,已经在越来越多的领域得到了广泛应用。在制造业中,尤其在市场占有率高的汽车产业中,生产线上很多工位都已被工业机器人取代,例如毛坯加工、机械加工、焊接、热处理、喷涂、装配、检测及仓库堆垛等[2]。
随着工业机器人的发展向纵向延伸,同时智能化水平也越来越高,机器人的应用范围也在不断地扩大,例如建筑、农业、采矿、服务、医疗卫生、国防航天等,机器人的种类也越来越多,如建筑机器人、农业机器人、采矿机器人、餐饮机器人、医疗机器人、排爆机器人、无人飞行器、无人舰艇等。随着 “中国制造2025”战略的实施,中国制造强国战略深入推进,工业机器人的应用范围越来越广,与人们生活的联系也越来越紧密,发展前景广阔。
2 机器人关键控制系统
工业机器人一般由硬件设施和软件系统组成,硬件是骨骼,软件是肌肉,两者相辅相成,缺一不可。为了能够完成相应的工作任务,需要相应的控制系统驱动硬件完成各种工作任务。目前,机器人的关键控制系统有3种基本类型:程序控制系统、适应性控制系统、智能控制系统。
2.1 程序控制系统
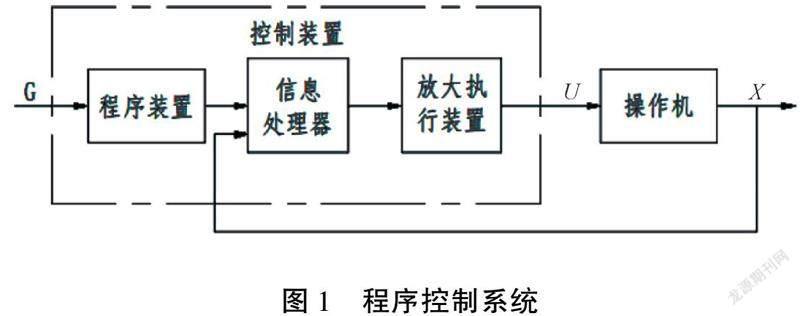
程序控制系统主要用于第一代“示教再现”机器人,目前市场上大多数工业机器人都属于这一类型,其结构如图1所示,主要由控制装置和操作机两大部分组成。其中,控制装置由程序装置、信息处理器和放大执行装置组成。控制装置实现对操作机输入控制信号的作用,操作机是起到按照控制要求来完成各种操作和运动的作用。
X为输出参数,指操作机相对应的各个关节的转动角度或移动的位移值。U为控制信号,指由控制装置输出的用于控制操作机的信号。G是X的设定值,是恒定不变的,其输出值X是变化的,按操作人员设定的时间程序进行相对应的变化,设定值G通过计算确定工业机器人对应的运动轨迹,从而编制相应的控制程序,这是程序控制系统一个最显著的特征。程序控制系统就是根据程序提前设定的值U对被控制对象的值X进行控制。一般情况下,程序控制系统都是开环系统,但实际上由于加工误差的存在,一般都需要闭环系统,通过其反馈环节来消除误差,确保加工工件的精确度。
程序控制系统主要由5部分组成,分别是开关信号、输入/输出接口(I/O)、程序控制器、驱动系统和执行机构等。这类系统在间歇性生产过程中的应用较为普遍,如多种自动混合加热控制的液体就属此类。
2.2 适应性控制系统
适应性控制系统主要用于第二代“有感觉”的工业机器人,这种类型的机器人装有不同类型的传感器(温度觉传感器、触觉传感器、滑觉传感器、视觉传感器等),通过这些不同类型的传感器分别实时检测系统内部的状态和外部环境状态,根据其检测的实时状态而自动进行相应的调整。所以在这种控制系统中,通常情况下不需要提前设定机器人的运动轨迹,系统会自动根据传感器实时检测的状态实现自动控制。
不完全的信息表现为系统和环境信息不完备或其变化规律的不确定。适应控制系统一般采用目的搜索和测试等方法,通过对环境的实时观察和评价,分析现有的控制质量,通过对有关环境特性,知识的不断学习和改进,实现对工程师工作过程的模仿,从而实现系统自动对相应的参数进行修正,最终实现改善系统质量的作用。
系统结构如图2所示。该系统和一般反饋控制系统相比多了一个适应控制回路。适应控制回路是根据系统控制对象的输入、输出关系来判别控制对象的特征以及外部干扰,再根据识别结果对反馈控制规律进行校正,以适应外部环境特性的改变。无论是进行识别,还是对控制规律的设计,都可以根据不同的分析结果采用与之相应的方法,最终达到不同组合方式形成不同的适应控制方案的目的。
当系统的环境特性及其变化可以通过某些参数来呈现时,这些参数就可以被识别,并通过反馈控制规律对这些参数的相应变化进行跟踪。这套系统叫作参数适应控制系统。对于复杂的情况,往往只能用一些笼统的参数指标来体现控制过程的质量,并以质量的优劣作为修正控制规律的基础,即质量适应控制系统。如果只改变控制器某些参数的方式(如放大倍数),则称为参数校正系统(参数校正系统)。若利用校正作用直接作用于控制信号的大小,则称为信号集成系统。
自適应控制系统在船舶驾驶、汽车无人驾驶、飞机驾驶、过程控制等方面都取得了一定的成功,也是今后的一个发展方向。但是,由于现在理论体系还不够完善,一些技术还没有被攻克,配套的装备也达不到相应的设计要求,因此,在完成设计后,还需要通过模拟技术进行最后的测试。
2.3 智能控制系统
智能控制系统是指人工智能控制下的第三代“智能”机器人的系统。与前面两种控制系统相比而言,智能控制系统是最先进、最完善的控制系统,可以根据外界环境的实时变化,自动实时修正自身结构和参数。智能控制系统结构如图3所示,智能控制系统具有自动检测所需新信息的能力,并能通过自身不断学习和经验积累修正并完善自身的计划。该系统是模拟人的智力工作过程,是机器人发展的最高目标。
3 典型控制系统
目前,工业机器人大多采用计算机二级控制,一级为主控级,二级为伺服控制,系统结构如图4所示[3]。
主控制级一般主要用于接收操作命令、各个关节移动之间的协调、各个设备之间的协调以及工作所需要完成的所有操作等各方面的工作,主要由主控制计算机、显示器、键盘、硬盘、软盘、示教盒、传感器等外围设备组成,其中主控制计算机是数据处理中心。伺服控制级是由若干个伺服控制系统组成,其核心也是计算机,每个伺服控制系统都对应着一个关节,用来接收主控制级发出的指令。该指令通过伺服控制系统传送到与之相对应的关节,实现对对应关节的实时控制,确保关节的正常运转。
该系统的工作过程为:工作人员通过输入端键盘或示教盒给主控制计算机输入操作指令,主控制计算机接收到来自输入端的指令后,对其命令进行翻译解读,并根据解读结果完成相应的算术运算和逻辑运算。将运算结果输出到伺服控制级,作为操作机构的执行信号,控制各关节按照命令进行运动。
3.1 主控制级
主控制级就是工业机器人的神经“中枢”,相当于人的“大脑”,主要由主控制电脑、控制软件、外围设备等部分组成。主控制级的主要作用就是建立工作人员和工业机器人之间的信息交互通道,接收工作人员的各种操作指令,反馈工作状态,完成机器人工作过程的各种算术和逻辑运算,并把主控制级的指令传送给伺服控制。
3.1.1 主控制电脑
主控制电脑是控制系统的指挥调度机构,主要作用是完成从工作任务、各个运动指令到相对应的关节运动之间需要完成的所有操作以及机器人各个设备之间的协调。主控机要求运算速度快,精度高,存储容量大,处理中断能力强。
3.1.2 控制软件
工业机器人的控制软件是机器人控制系统的重要组成部分,主要任务是根据机器人的运动轨迹编写相应的程序,控制机器人按照运动的轨迹进行精准工作。程序一般分为主程序和子程序。
3.1.3 外围设备
主要的外围设备有显示器、键盘、硬盘、软盘、示教盒、传感器、操作面板等。
3.2 伺服控制级
伺服控制级由多个伺服控制系统组成,每个伺服控制系统既相对独立又联系紧密,它们分别驱动操作机的一个关节。具有位置和速度反馈的伺服控制系统如图5所示。
3.2.1 伺服驱动器
伺服驱动器通常由伺服电动机、位置传感器、速度传感器和制动器4部分组成,伺服电动机的输出轴和操作机的关节轴直接相连,以实现对相应关节运动的控制以及对关节位置和速度的检测,在没有电源的异常紧急情况下,制动器可以自动制动,实现关节的位置保持不变。在正常工作过程中:得电时,电磁铁线圈通电,摩擦盘将脱开,使关节轴自由转动;断电时,摩擦盘在弹簧的作用下压紧,随之刹车。
3.2.2 伺服控制器
伺服控制器的基本电路由比较器、运算器和功率放大器等组成。
4 结语
机器人控制是机器人技术的研究热点,是目前自动化控制技术的一个暴风口,是21世纪高新技术领域的重要前沿技术之一,改变了传统的工作方式,必将引领未来经济社会的发展。机器人控制系统作为机器人控制的核心,其重要性不言而喻。目前,机器人控制系统的技术已经有所突破,拓宽了未来机器人的应用范围,目前已经涵盖了军工国防、航空航天、工业生产、农业生产、医疗、教育、服务、生活等各个方面,极具应用价值,一场机器人技术研究的新高潮和发展契机已经来临。
参考文献
[1]杨杰忠.工业机器人技术基础[M].北京:机械工业出版社,2019.
[2]孙志杰,王善军,张雪鑫.工业机器人发展现状与趋势[J].吉林工程技术师范学院学报,2017(7):2.
[3]陈刚.机电一体化技术[M].北京:清华大学出版社,2017.
(编辑 王雪芬)
Abstract: Robotics is a new hybrid technology, which integrates the knowledge of many subjects. At the same time, robotics covers machinery, electronics, electrical, computer, communication and other disciplines.Since the 21st century, as one of the most advanced technologies in the field of society, the development of robotics is bound to bring a profound and powerful impact on society. In the actual operation process, in order to ensure the normal completion of various tasks of the robot, we must ensure that the hardware facilities and software systems complement each other. The robot control system is the core of robot control and the main factor determining the functionality and performance of robots, and its importance is self-evident. Based on this, the article designs the key control system of the robot.
Key words: robotics; robot control; robot control system
