货运车辆主动安全预警系统
2023-05-22张欣迪沈文涛莫骁鸣
张欣迪 沈文涛 莫骁鸣

摘 要:在科技高速发展与追求高效的当今社会,保证货运车辆行驶安全尤为重要,为了能够有效避免事故发生,在事故发生前给出提示预警至关重要。本文首先分析了组成货运车辆主动安全预警系统的高级驾驶辅助系统ADAS、司机驾驶行为预警系统DMS的组成以及关键技术。其次,定义主动安全预警系统能够预警的危险类型;通过整合ADAS、DMS系统获取的数据及视频结合主动安全预警算法,最终生成风险等级对应不同等级提醒驾驶员改正危险驾驶行为。最后阐述对货运主动安全预警系统的价值总结以及前景展望。
关键词:高级驾驶辅助系统ADAS 司机驾驶行为预警系统DMS 风险等级算法 交通事故前预警
1 引言
在引发交通事故的原因中,人为因素首当其冲,成为主要诱因。《世界预防道路交通安全伤害报告》中统计的“影响交通事故发生的危险因素”,疲劳驾驶高居第三位。而这些因素中还有其他几条也和驾驶员危险行为有着密不可分的关系[1]。
由此可见,每年因为驾驶员危险驾驶行为而酿成的事故不计其数,这些事故的起因则是驾驶员的疲劳、精力不集中、以及车距过近等[2]。所以为了帮助驾驶员更安全的行驶在路上,车辆主动安全预警系统对驾驶员的注意力及行为监控、车辆行驶偏离情况以及车距、行人监测都是十分必要的。
随着人类科学技术的进步,以及全球一体化的迅速发展,交通运输行业在人们的生产生活中凸显出了越来越重要的地位,但在方便生活的同时,一起起交通事故所带来的影响和损失也不容忽视。所以保证车輛行驶安全就成了人们关注的焦点。据研究数据显示,导致交通事故发生的众多因素当中,由于驾驶员长期疲劳驾驶、不良驾驶态度习惯等引起的超过70%,且只需要给驾驶员0.5s的时间,就能避免60%左右的事故发生[3]。所以亟需通过科学的手段在事故发生前,予以及时的提醒以避免事故的发生。特别是针对大型货运车辆,发生事故的后果是极其惨重的,故国家对此发布了国标GB 7258《机动车运行安全技术条件》中规定,车长大于1m的客车必须装配高级辅助驾驶系统(ADAS)和司机驾驶行为预警系统(DMS)等主动安全预警系统,来有力监管司机行为,予以及时提醒,降低事故发生率,保障人民生命财产安全。
2 关键技术
2.1 高级驾驶辅助系统ADAS
高级辅助驾驶系统(Advanced Driving Assistance System,简称“ADAS”)是通过安装在车辆上的传感器,在行驶过程中,实时感知车辆内部和外界环境变化,进行数据采集与分析,并通过各种算法进行识别完成场景分类和实时数据计算,进行动静态物体识别、侦测、跟踪,及时发现影响车辆行驶安全的行为或存在的隐患,以警报提示音的方式及时预警提醒驾驶员,为驾驶员采取应对措施及时消除隐患争取更多的反应时间,最大限度的降低事故发生,为车辆行驶安全提供了主动安全保障[4]。
组成ADAS的硬件传感器设备包括:摄像头、毫米波雷达以及北斗定位。
摄像头:智能前视摄像头主要由镜头、光学传感器、图像处理器、保护电路以及CAN收发器组成。基于车辆行驶过程中环境的复杂性,需要任何路况及外界环境下都能够持续进行良好的监控,这就对摄像头的低光性能和环境温度适应能力就提出了极高的要求,同时也要保证摄像头视野的开阔性。图像采集处理则是对车辆行驶前方的路况信息进行实时监测和采集,对图像质量的改善则依赖于计算机图像处理技术。其中还包含障碍物识别技术,在完成图像分类后,再通过具体的图像比对算法进行障碍物车辆或行人判断。路况信息显示则是将实拍路况情况经处理投射到液晶显示屏上,在扩展了驾驶员的视野同时,还能实时检测路况信息,保障行驶安全。
毫米波雷达:雷达即是用电磁波来探测目标的一种电子设备。原理为对要探测的目标发射电磁波,目标接收到照射后反弹电磁波,雷达接收其回波。通过这种方式就可获取目标至电磁波发射点的距离、方向等信息。雷达的频率和波长决定了它的功能特性,而ADAS使用到的毫米级雷达是30~300GHz(1~10mm波长)的设备。目前市面常用ADAS设备多采用77GHz和24GHz两种类型,由于其波长特性均可轻易穿透雨水和灰尘,不受恶劣天气等外界环境影响[5]。但由于雷达分辨力、穿透力与频率成正比的特性,77GHzz 毫米波雷达正逐渐成为当前汽车领域的主流传感器。毫米波雷达主要安装在车辆四个角、以及前保险杠位置,正对车辆行驶正前方。可以利用以上介绍电磁波工作原理完成对车辆行驶前方一定范围内的行人等障碍物的感知,辅助驾驶员实现盲区检测、辅助变道等操作。
北斗定位:北斗卫星导航定位系统全球卫星导航系统的四大供应商之一,是我国自主创新研制的定位导航通信技术。截止至2020年3月,我国共有54颗北斗导航在运卫星,全面建成了覆盖全球的北斗卫星导航系统,为全球组网的实现奠定了坚实基础[6]。目前,北斗系统能够达到10m的定位精度、0.2m/s的测速和10ns的授时精度,且具备模式兼容、通讯功能,在与车辆主动安全结合过程中保证车辆位置定位精度的同时,支持驾驶员通讯。
在北斗定位系统与车辆辅助驾驶结合过程中,需要给车辆装配北斗车载定位终端,终端接收北斗卫星信号实现车辆定位,通过移动网络实现车辆与主动安全预警系统的通信。在定位跟踪功能基础上,还可实现行车记录仪功能,利用传感器收集车辆行驶参数以及车辆控制参数等,通过无线链路传输实现数据与系统的结合。北斗车载定位终端的安装,对各类车辆特别是大型运输车辆,有极强的监管和辅助作用,保证安全运输。
2.2 司机驾驶行为预警系统DMS
司机驾驶行为预警系统通过终端采集驾驶员人脸信息并利用人脸五官定位、深度学习算法技术分析驾驶员是否有抽烟、打瞌睡、打电话、疲劳驾驶、驾驶行为异常等违规行为,并提前做出风险预警,下发语音提醒驾驶员同时上报后台管理人员,提高车辆安全驾驶,着力从驾驶员角度减少道路交通事故发生率。
DMS系统用到的硬件设备主要是摄像头,考虑到DMS的监控主要是针对驾驶员面部,在不对驾驶员视线造成影响且满足佩戴眼镜等现实情况,结合考虑外界环境光强程度,多采用红外摄像头来完成驾驶员面部信息的采集。对于摄像头采集到的人脸信息经图像处理系统完成对图像的处理后,由处理系统进行疲劳监测和分心监测识别。按照苏标要求,当触发DMS系统报警时会拍3张间隔为200 ms的照片和1段默认为5 s长的短视频上传到监管平台保留证据[7]。
2.3 主动安全预警系统
2.3.1 车辆风险等级算法设计
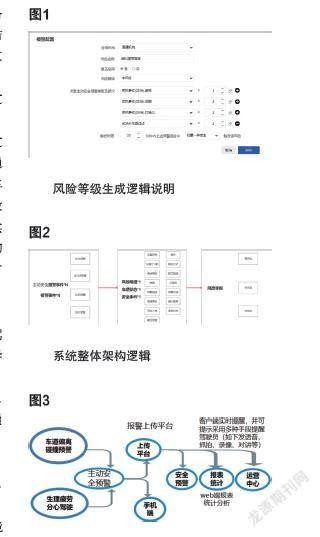
主动安全预警系统主要是根据ADAS、DMS检测设备上报的报警事件,根据详细的风险明细形成安全事件,再经由事先配置好的报警配置(如下图1),按照不同占比情况组合安全事件,形成最终的风险等级(如下图2)。系统会自动生成风险等级列表,根据风险等级自动或人工干预下发对应驾驶员提示语音,达到主动预警作用,防患于未然,降低事故发生率[8]。
风险事件生成配置
风险等级生成逻辑说明
系统整体架构逻辑
3 关键技术在场景中的应用
3.1 高级驾驶辅助系统ADAS
3.1.1 前车碰撞预警
前向碰撞预警系统(Forward Collision Warning,FCW)被越来越多地用于车辆运输特别是大型货运车辆的纵向辅助驾驶系统中。在车辆行驶过程中,前向碰撞预警系统通过传感器实时检测与前车的距离和相对速度,在检测到可能与前方车辆发生碰撞时,向驾驶员传递预警信号,使驾驶员根据提醒减速或紧急制动,从而降低追尾事故发生的可能性。
3.1.2 车距监测预警
约占据交通总事故三分之一的追尾事故,同样也困扰着大型货运车辆。主要问题集中在驾驶人员不能对车輛之间的距离作出准确判断,或对紧急制动车间距离没有准确的感知和把控,那么避免事故发生的关键就集中在如何使车间距离始终保持在安全距离范围之外。
车距监测系统通过实时检测与前车车距结合当前车速,估算前车突然刹停的车距过近时间,如果发现过近时间小于阈值时,触发报警,终端喇叭会进行提醒(前车距离过近),同时会把告警上报到后台,实现对车距的实时监测,完成对车距过近的预警。
3.1.3 车道偏离预警
车道偏离预警系统的功能是辅助驾驶员在正确的车道中行驶,当车辆跨越车道边界行驶时,系统会发出发报警,及时提醒驾驶员,及时纠正车辆偏离驾驶的倾向,从根本上避免车道偏离事件的发生[9]。车道偏离预警系统会实时检测当前行驶车道的左右车道线,结合左右转向灯信号,当系统检测到未打转向灯的车道偏离情况时,触发报警,终端喇叭会进行提醒,同时会把告警上报到后台,车道偏离预警在车速高于某一设定时速时开始运作,当车速低于设定时速或者正常变道、转弯的情况下不会报警。
3.1.4 行人碰撞预警
数据显示,有近四分之一的人车事故是由于行人或非机动车从驾驶员的视野盲区出现导致的,为避免以上类型事故,急需要行人或非机动车监测报警技术,提前提醒驾驶员人员位置,从而避免人车事故的发生[10]。车速一般低于50km/h时行人碰撞预警系统启动,通过识别监测行人或非机动车的行进速度、轨迹等,当检测到前方主车道内有行人时触发报警,终端喇叭会提醒驾驶员,同时会把告警上报到主动安全后台。
3.2 司机驾驶行为预警系统DMS
3.2.1 疲劳驾驶预警
疲劳驾驶主要是指驾驶员因长时间驾驶而产生生理性质的疲劳,主要是根据摄像头记录并通过算法分析驾驶员闭眼时长、打哈欠等行为做出判断。再车辆行驶中,检测到驾驶员闭眼或打哈欠时,终端喇叭会进行提醒,同时会把告警上报到后台,并拍照和视频作为证据。
3.2.2 危险驾驶行为预警
危险驾驶行为主要包括发现在车辆行驶过程中,驾驶员存在抽烟、接打电话、注意力不集中、左顾右盼等行为,通过DMS摄像头检测到驾驶员出现以上行为时,终端喇叭会进行提醒,同时会把告警上报到后台,并拍照和视频作为证据
3.3 主动安全预警管理系统
3.3.1 车辆实时监控轨迹回放
主动安全预警管理系统可实时跟踪定位车辆位置,精确地展示车辆当前经纬度、车速、显示设备在离线状态,并支持对车辆的历史行驶轨迹进行查询。能够帮助管理人员远程监控每辆车的实时轨迹状态和历史轨迹回放查询。
3.3.2 车辆风险报警主动干预
车辆风险报警主动干预功能的整体设计如图所示,当车辆的发动机参数、运动参数、坐标参数或司机的面部参数、动作识别、区域识别等触发了主动安全报警事件时,触发的主动安全事件会根据风险识别大脑提前设置好的算法进行风险等级的判定,对于中低级风险事件,系统会自动下发语音,完成风险提示。对于高级别风险事件,会有专门的运营人员进行7*24小时的人工干预,与驾驶员取得联系,纠正危险驾驶行为。进行自动+人工语音提醒的主动干预,从而解除风险事件,保证行车道路安全,见图4。
4 结语
车辆主动安全预警系统利用现代信息技术、传感器等来提前预警车辆行驶过程中危险的发生,通过感知技术获取的外界信息传递给驾驶员,结合外界情况和驾驶员行为等多维度信息综合判断是否构成行车安全隐患。在事故发生前及时预测潜在危险因素,并对驾驶员的不安全驾驶行为进行预警。车辆主动安全预警系统整合了高级驾驶辅助系统ADAS和司机驾驶行为预警系统DMS的功能,并结合ADAS和DMS获取的告警数据进行智能分析、处理,通过主动安全的手段有效规避风险,为提升安全驾驶水平提供了可行路径和坚实基础。相信主动安全预警技术未来也将被大力发展应用于无人驾驶等领域发挥更大的作用。
参考文献:
[1]袁双红.汽车驾驶员监控系统应用现状及前景分析[J].数字科技.2020(46):30-32.
[2]霍志新.车辆智能主动型安全系统分析[J].江苏科技信息.2015(13):61-62.
[3]孙善毅,车辆主动安全视频监控系统平台关键技术研究与研发[D].北京:中国矿业大学,2020.
[4]梁伟强.洪福斌.ADAS技术及市场现状综述[J].科技与创新.2021(07):6-8.
[5]钱若愚.车载 ADAS 传感器毫米波雷达解析[J].智能车联网.2020(04):26-29.
[6]鲍捷杰.基于北斗定位+ADAS 的客运车辆监控系统研究[J].信息通信.2020(11):213-214.
[7]王昌柏,刘永刚,林鹏.基于红外摄像头的DMS系统的设计和实现[J].汽车博览.2021(05):199-202.
[8]于立娇,吴振昕,王文彬,高宏伟.驾驶员疲劳状态监测系统综述.[J].汽车文摘.2019(03):24-29.
[9]宋宁.高级驾驶辅助系统学习功能的设计与实现[D].沈阳:东北大学,2014.
[10]谭勉.营运驾驶员不安全驾驶行为监测方法研究[D].西安:长安大学,2016.
