基于合作博弈论的合流区多车协调控制方法
2023-05-22方烁翔徐良杰
方烁翔 徐良杰


摘 要:在智能网联技术背景下,针对高速公路车辆合流过程中存在的安全冲突,利用合作博弈论中的夏普利值解法,提出了智能网联环境下的合流区多车协调控制方法,并利用MATLAB在不同运行场景、不同合作程度下对提出的协调控制方法进行仿真分析,验证了高速公路合流过程中车辆冲突的潜在原因和规律。结果表明:本文提出的多车协调控制方法能够极大减少车辆组避免交通冲突总共所需虚拟支付成本,相比于非合作博弈条件均能降低16%~21%,且对多个车辆的协调控制效果比对两辆或单个车辆的效果更好。
关键词:高速公路 合作博弈 协调控制 仿真分析
1 引言
高速公路合流区是高速公路通行的主要入口,交通需求在合流断面上骤升,其交通流相较于普通路段更加不稳定,车流量更大,同时匝道车辆与主线车辆的速度差導致比一般的交通合流情形更为复杂。同时,在合流区上匝道路段的汇入车辆需要加速至主线最低限速才能完成合流,而提供缓冲的加速车道长度有限,驾驶员对于换道需求更为紧迫,因此合流对主线道路交通流产生的干扰更为严重,极大降低通行效率,甚至导致交通安全隐患。随着智能网联技术的发展及在交通专业的应用,路段内车辆和道路数据能够进行共享、融合,实现车—路—云的信息共享,中央控制处理器通过对这些数据进行收集加工,经过进一步的分析计算,根据相应的算法生成区域内交通流的协同控制策略,并实时精确地将这些控制信息发送给逐个网联车,完成协同调控。国内外对此做了大量研究,Andreas A[1]等讨论了在自动车辆进入高速公路上的减速区时控制其速度的问题,将控制问题公式化,并提供一个可以实时实现的解析的封闭形式的解决方案,得到车辆在安全约束下的最优加减速。Wan J等[2]基于网联车中的移动群体感应技术(mobile crowd sensing,MCS)提出了一种高速公路路网情况下实时更新的交通流预测与路径选择模型算法,通过仿真证明能够实现路网全局优化。王东柱等[3]研究了在车联网环境下,针对货车在匝道合流区运行和汇入所产生的安全隐患和冲突,以时间为控制约束条件构建了合流区车辆预警控制方法。杨敏[4]以高速公路合流区为背景,基于车辆行驶特征建立智能网联车辆的协调控制流程,并提出了新的智能网联自动驾驶车辆冲突解脱协调方法。罗孝羚等[5]为解决传统匝道控制造成的大量运行延误,提出了一种智能网联车环境下的高速匝道汇入车辆轨迹优化的两阶段模型,优化车辆依次通过冲突区域的时序和车辆轨迹的油耗。
在上述研究的基础上,本文以高速公路合流区为研究对象,构建车—路—云协同的智慧高速公路合流区协调控制框架,建立基于合作博弈论的交通冲突协调方法,实现匝道车辆安全、高效合流,为智能交通管理控制提供了决策依据和借鉴作用。
2 智能网联环境下的合流区多车协调控制方法
2.1 合流区多车协调控制框架
合流区是车辆从匝道驶入高速公路路基本路段的关键节点,路况相对于普通路段更为复杂,车速分布较不均匀,是交通冲突的频发区域。当主线交通量较小时,最外侧车道存在足够的换道机会和换道距离,合流车辆可经过加速后直接驶入主线;但交通量逐渐增大时,匝道车辆可能因无法安全汇入而被迫排队等待,而强制换道行为则会对主线交通流造成的影响较大,发生车辆碰撞的风险也更大。
智能网联汽车是通过搭载先进的车载传感设备、控制器装置,融合现代通信网络技术,结合云端中心计算和基础技术支撑,实现车辆与驾驶员、道路信息、路侧设备和云计算中心的智能化信息传递和交互,替代人类甚至超越人类综合实现车辆安全、高效、舒适、绿色驾驶。智能网联环境下的合流区协调控制是利用V2X通信技术采集并传输控制区域内车辆当前位置、速度等数据,通过云计算中心计算并预测合流区内可能引发的交通干扰和冲突,并反馈给相应的网联车辆进行协调控制,调整其驾驶行为,从而降低合流行为对交通流的干扰,避免车辆间发生碰撞,具体协调控制场景如图1所示。
为更好地提出合流区多车协调控制方法,对本文所采用的智能网联技术作出如下假设:
(1)合流区场景内均为智能网联自动驾驶车辆(CAV),控制区内存在具备云计算技术的中央集中控制器,通过无线通信技术获取路侧单元和车载设备发送的打包信息,并将控制指令发送给每个车辆。
(2)路侧单元通过高精度定位和多途径信息融合技术准确获取主线、匝道上车辆的数量、位置和速度等信息,车辆-车辆-路侧单元之间形成一个自组织的车载网络进行信息交互。
(3)不考虑延时和误差,智能网联汽车主要通过V2X技术传输、接受数据信息,现有车联网通信技术延时已小于50ms,随着技术的发展,认为智能网联车辆均具备高传输速率的网络,精确无误地发送并接受中央集中控制器和路侧单元的相关信息。
(4)所有网联车辆均具有良好运行性能,且对非必要的协调驾驶意愿程度进行提前设置,底层控制单元能较好地接收并执行中央集中控制器下达的指令。
2.2 基于合作博弈的多车辆协调过程
合作博弈理论广泛应用于经济学、交通等各个学科,解决个体利益与整体利益的博弈问题,主要包括占优解法和估值解法[6]。本文以估值解法中的夏普利值为基础模型,其博弈成本总函数的表达式为:
c=(a1x1+a2x2+…+aixi+…+anxn)·[1+e-0.2] (1)
式中:xi为第i个个体的支付代价;ai为个体的支付成本系数;1+e-0.2为合作博弈因子。
其中,合作博弈中每个参与者的边际贡献函数为:
(2)
以上述模型为基础,将网联环境中各个车辆的协调合作意愿程度作为各虚拟支付成本系数,车辆与潜在冲突点的距离和当前行驶速度是车辆协调控制的关键影响因素,因此作为车辆调整所需虚拟支付成本的构成要素。
由于在合流过程中,各车辆与合流冲突点的距离越大,车辆可调整时间更多,虚拟支付成本相应越低;相反,当前行驶速度越高,车辆靠近潜在冲突点行程时间越短,存在的隐患更大,因此建立车辆组中各车辆虚拟支付成本来源方程:
(3)
式中:k1为距离成本比例;li为车辆i与合流冲突点的距离;k2为速度成本比例;vi为车辆i的运行速度。
总虚拟支付成本函数为:
(4)
式中:cj为合作博弈条件下决策联盟j的虚拟支付成本;a、b、c分别表示为车辆1、2、3的合作强弱程度。
由于网联自动驾驶车辆协调过程中以匝道车辆安全汇入为主要目的,在主线车辆调整意图相同的情况下,(x1,0,0)、(0,x2,0)与(0,0,x3)决策分别表示为车辆1、车辆2、车辆3单独进行调整,因此不具备合作博弈意义;(0,0,0)决策表示为各车辆均未进行任何调整,故不考虑此方案。
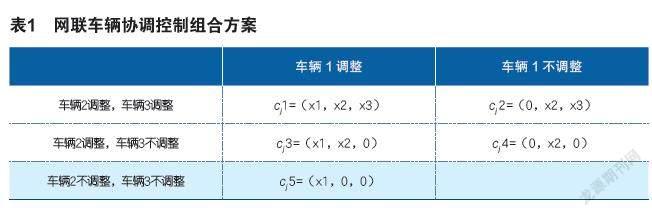
因此拟定plan1为cj1=(x1,x2,x3),表示网联车辆组中三辆车均进行相应调整;plan2为cj2=(0,x2,x3),车辆1不调整,车辆2、车辆3进行调整、plan3为cj3=(x1,x2,0),车辆1、车辆2进行调整,车辆3不进行调整;plan4为cj4=(0,x2,0)车辆1、车辆3不进行調整,车辆2进行调整;plan5为cj5=(x1,0,0)车辆1进行调整,车辆2、车辆3不进行调整。a、b、c分别为网联自动驾驶车辆1、2、3调整意图的大小,若车辆意图进行行为调整则为1,若车辆调整意愿中等则为2,拒绝调整则为3;合作博弈因子则反映了协调车辆组的有效合作程度,见表1。
决策联盟最小虚拟支付成本函数为
cmin=min(cj)j=1,2,3,4 (5)
式中:cmin为cj中所得的最小值。
最小虚拟支付成本的决策联盟中各成员边际贡献的为:
(6)
式中:cj1*、cj2*、cj3*分别为非合作博弈论条件下车辆1、2、3需支付的总成本;△C为非合作博弈条件下与合作博弈的虚拟支付成本差。
cj1*、cj2*、cj3*及△C的计算方法如下:
cj1*=(ax1)(1+e-0.2x1) (7)
cj2*=(ax2)(1+e-0.2x2) (8)
cj3*=(ax3)(1+e-0.2x3) (9)
△C=cj1*+cj2*+cj3*-cmin (10)
并且有:
cj=cj1*+cj2*+cj3* (11)
3 仿真分析
3.1 仿真场景描述
当智能网联车辆1意图从匝道上合流汇入主线,中央控制中心将主线最外侧前后行驶的车辆2、3与其视为一个车辆组。若三辆智能网联车辆均继续保持原有行驶状态,不进行任何协调时,车辆组将在合流过程中于冲突点发生车辆碰撞;当任一网联车辆意图接受协调控制时,各车辆根据不同的配合程度进行协同驾驶,在当前车道上进行相应加减速或换道完成协调控制目标,避免本次交通冲突。
为简化仿真过程,将冲突协调区域长度设置为100m。分别在不同的l取值,不同的v取值共3种情形下,将虚拟支付成本来源方程中的k1取值进行变化,同时k2=1-k1,分析网联网联驾驶车辆在plan1~plan5不同控制情形及不同的a、b、c取值下产生的协调结果,利用MATLAB软件建立上述虚拟支付成本模型,计算并比较进行合作博弈协调控制条件与非合作博弈的虚拟支付成本。仿真场景参数如下表2所示:
3.2 仿真结果分析
针对网联车组3种运行场景,假设三辆车均存在调整意愿,且a=1、b=2、c=3,即匝道车辆1协调配合程度最高,主线车辆2、3配合程度依次减弱,对智能网联环境下高速公路合流区进行仿真测试,得到支付成本差值△Cpi随 k1的变化曲线如图2所示。
从图中可以看出:由于plan4表示为仅车辆2参与协调驾驶,与非合作博弈控制情形相同,则△Cp4=0。其他运行场景下网联车辆合作博弈与非合作博弈的虚拟支付成本差值△Cpi始终呈上升趋势,△Cpi与k1、k2变化密切相关,且△Cp1均大于△Cp2、△Cp3、△Cp5,即同条件下plan1的合作博弈协调控制效果始终最优,多车协调控制效果明显优于两车或单车协调控制。
对比场景1、2可知,网联驾驶车辆距离潜在冲突点位置更大时,△Cp1、△Cp3、△Cp5相对略小,合作博弈协调控制迫切性越低,效果越不明显;对比场景1、3可知,最外侧车辆行驶速度更大时,合作博弈条件与非合作博弈虚拟支付成本变化差明显增大,说明合作博弈的协调控制效果受行驶速度的影响程度较大,合流区内的匝道车辆与主线车辆的速度差是产生合流冲突的关键因素,通过降低主线车辆行驶速度能够更有效应对和避免交通冲突。
图3为当k1=0.9,场景1、2、3中车辆组中在不同协调合作程度下合作博弈虚拟支付成本与cj与非合作情形cj*之间的对比。可以看出3种场景下cj较cj*的成本较低率均稳定在16%~21%左右,说明通过基于合作博弈论的协调控制方法能有效降低网联驾驶车辆组总共所需付出的虚拟支付成本。比较a均等于1时,不同b、c情况下的总虚拟支付成本,发现网联车辆组协调合作程度越强,所需的总虚拟支付成本越低,合作博弈的效果也更优。
4 结语
(1)通过分析在高速公路合流区内智能网联车辆组在不同试验场景下,基于合作博弈论的协调控制方法的作用效果,解释了车辆在合流过程中所潜藏的规律,通过降低主线车辆行驶速度,减少与匝道车辆的速度差能够有利于应对和避免交通冲突。
(2)通过对比合作博弈协调控制方法和非合作博弈条件的虚拟支付成本,本文所提出的多车协调控制方法在不同场景下均能降低16%~21%的虚拟支付成本,且车辆合作程度越高,车辆避免冲突的所付出的代价越小。
参考文献:
[1]Andreas A,Malikopoulos,Seongah Hong.Optimal control for speed harmonization of automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems,2019,7(20):2405-2417.
[2]Wan J,Liu J,Shao Z. Mobile crowd sensing for traffic prediction in internet of vehicles[J].Sensors,2016,16(1):1-15.
[3]王东柱,陈艳艳,马建明.车联网环境下的高速公路合流区协调控制方法及效果评价[J]. 公路交通科技,2016,33(09):99-105.
[4]杨敏,王立超,张健.面向智慧高速的合流区协作车辆冲突解脱协调方法[J].交通运输工程学报,2020,20(03):217-224.
[5]罗孝羚,蒋阳升.智能网联车环境下高速匝道汇入车流轨迹优化模型[J].交通运输系统工程与信息,2019,19(04):94-100.
[6]SHAPLEY L S. A . value for nrperson games[J].Contributions to the Theory of Games,1953,2(28):307-317.
[7]张伟,肖日东,邓晶.基于遗传算法的动态模糊神经网络城市快速路入口匝道控制[J].公路交通科技,2017,34(02):129-134+148.
[8]畅,庄伟超,殷国栋.高速匝道入口多智能网联车协同合流控制[J].东南大学学报(自然科学版),2020,50(05):965-972.
[9]秦严严,余海燕,何兆益.车联网环境下自动驾驶交通流建模与分析[J].武汉科技大学学报,2019,42(06):469-473.
