视觉拐弯:转角视野盲区无线感知监测算法
2023-05-11丁寅凡
王 潮,周 梦,丁寅凡,汤 霖
(1.上海大学 特种光纤与光接入网重点实验室,上海 200444;2.上海大学 特种光纤与先进通信国际合作联合实验室,上海 200444;3.上海大学 上海先进通信与数据科学研究院,上海 200444)
1 引 言
在行车过程中,由于障碍物的遮挡和环境的影响,驾驶员的视野不能直达所有区域,对盲区内的情况不甚了解,从而导致的交通事故数不胜数,因此监测视野盲区内的路况成为人们的关注话题。
目前,已有的各种传统监视系统中大多是利用摄像头、转角镜或传感器进行路况识别。摄像头[1]是通过采集人体行为动作图像,利用计算机视觉计算方法来提取和识别人体动作序列,但是该方法计算量巨大,容易受到光照条件以及障碍物的影响,同时摄像头存在监测死角,只能实现视距下特定范围内的感知。转角镜易受到天气(如大雾、雨天等光线不足)的影响,从而无法实现辅助观察的功能。另外,通过专用传感器,如运动传感器被安装在墙壁上来监测盲区路况,采集相关的动作信息,从而实现人体行为感知,但是造价昂贵,安装不便,难以广泛应用。综上分析,尽管现存的感知设备系统多种多样,但都存在一定局限性,即需要配置专用的硬件设备、易受到天气和光线的干扰和影响、强调在视距范围内使用、成本高昂不具有普适性等。因此,为了解决现有感知技术的局限性,基于无线信号的感知系统应运而生。
近年来,研究者提出了一系列基于无线信号的无线感知技术的实现方式,即无线感知系统[2]。无线感知系统利用了无线信号在自由空间中的传播模型,由于受自由空间内障碍物的影响,使信号以直射、反射、散射等形式在空间中多径传播,而人的行为动作会改变这些信号的传播路径,路径衰落规律因而发生变化,出现与动态对象相关的多径衰落和多普勒频移现象。因此,接收信号中含有包括人动作在内的丰富的环境信息,可提取这些信息进行分析处理。
根据上述无线感知理论,笔者提出了一种基于无线感知的转角视野盲区监测系统,监测视野盲区环境下的行人状况,实现“视觉拐弯”,可普遍应用于需要在低可见度、非视距环境下工作的应用领域之中。为满足视野盲区的特殊性需求,本系统选择胡同作为实验场景,检测深夜环境下盲区监测的可靠性和有效性。
2 国内外研究现状
随着无线感知技术的发展,国内外的相关研究团队已经提出了多个基于无线感知来检测识别人体行为活动的系统[2]。其中代表团队就是麻省理工大学的Dina Katabi等人,在2018年提出了新型人体姿态估计系统RF-Pose[3],该系统利用无线电信号准确地跟踪穿过墙壁和障碍物的二维人体姿势,将有关人和环境的视觉信息转化为射频信号。2019年,LI等[4]提出了基于骨架的动作识别系统Aryokee,可以在墙壁遮挡以及光线不好的条件下检测人类行为,解决了目前基于视觉的动作识别所不能解决的场景。
2020年,研究人员提出了一种新型睡眠姿势监测系统BodyCompass[5],通过研究环境中的射频反射来判断用户夜间的睡眠姿势,不需要用户佩戴或接触任何传感器,不侵犯用户隐私,对于减少呼吸暂停事件等有着重要意义。同年,又提出了新型的人体再识别系统 RF-ReID[6],利用射频信号提取更持久的人类识别特征,如身体大小和形状,能在遮挡和光线不足的情况下工作,更能保护隐私,有助于扩展到与隐私相关的领域,如医疗保健。
国内的研究团队围绕无线感知也做了很多相关工作,如基于Wi-Fi 设备的低成本和非侵入式睡眠监测系统WiFi-Sleep[7],利用信道状态信息比率,结合振幅和相位信号,监测4个不同的睡眠阶段;基于Wi-Fi的步态识别系统WiDIGR[8]解决了传统无设备人体步态识别系统对行走方向的强依赖性问题;第一个轻量级且适用于全天时使用的实时非接触式人体检测系统WiSH[9],从接收信号的时间和频率相关性中提取简单有效的特征,可实时、长期地监测人体;再如利用Wi-Fi进行指纹定位[10],利用FMCW雷达实现了高精度的心率监测[11]等。
在早期的无线感知研究中,大多利用接收信号强度(Received Signal Strength,RSS)[12]进行处理,识别人体行为。但在复杂的情况下,由于多径衰落和时间动态,其性能会急剧下降。而信道状态信息(Channel State Information,CSI)能够识别多径特性,并帮助分析和捕获人体运动[9]。
因此,无线感知技术的进步使得各个领域的实际应用项目的研发得到突破。笔者利用Wi-Fi 信号在传播过程中的多径效应,以胡同作为实验场景,模拟复杂的实际城市交通路况,监测深夜时的环境变化,有效判断行人通过情况,给来往车辆提供及时的警示。当行人经过视野盲区时,系统感知人体运动引起的信号变化,从与人体行为相关的信道状态信息中提取动作信息进行分析处理,实现 Wi-Fi 信号感知空间环境状态,在复杂的城市交通环境下也能达到监测目标的目的。
3 系统设计
3.1 系统框架
笔者提出的视野盲区监测系统利用无线信号所携带的信道状态信息来识别空间环境状态。该系统整体可分为3个模块,如图1所示。

图1 系统总体架构示意图
(1)数据采集:发射器发送无线信号,接收器在同一区域内收集信道状态信息。
(2)数据处理:对采集到的原始信道状态信息进行数据预处理和特征提取。
(3)分类模型训练与测试:利用XGBoost对上个模块所得到的特征进行模式识别,生成分类模型,采集相同环境下的数据,对未知数据进行识别,从而得知当前环境的状态。
3.2 系统实现
当Wi-Fi信号覆盖下的自由空间中环境处于静止时(静态环境),所获得的信道状态信息幅度处于稳定状态;当有行人经过该空间时(动态环境),信道状态信息幅度就会产生剧烈抖动。因此,本系统提取信道状态信息幅度进行数据处理分析,获取两种环境的特征状态进行分类模型训练,判别环境状态,达到监测视野盲区的目的。
3.2.1 数据预处理
系统收集的原始信道状态信息会存在各类噪声,因此,系统在进行提取特征训练模型之前,需对原始数据去噪,获取纯净的信道状态信息数据。

巴特沃斯(Butterworth)低通滤波器能够较好地去除高频噪声[14],且不会造成信号的相位信息大幅失真,在通带上也有最平坦的幅度响应。因此,笔者采用巴特沃斯滤波器对原始信道状态信息数据进行初步去噪。
每组发送-接收天线对上由人体行为引起的每个不同子载波信道状态信息时间序列的变化具有相关性[15],监测系统采用的主成分分析(Principal Components Analysis,PCA)算法正是利用这种相关性进行二次去噪,去除信号中不能通过传统低通滤波器去除的不相关的噪声成分,获得纯净的信道状态信息时间序列,提高环境识别率;同时减少信道状态信息的维数,降低计算复杂度。主成分分析算法根据方差进行降序排列,噪声成分分量因有更高的方差而处于第一个主成分分量,将其丢弃并使用剩余分量进行特征提取[16]。
3.2.2 特征提取
在不同环境下所测得的信息数据之间存在明显的差异。为了有效区分静态环境和动态环境以实现监测功能,应提取能惟一代表各个环境中信道状态信息的特征矢量。选择中位数绝对偏差、四分位差、最大值、最小值、差值、平均值、方差、归一化标准偏差这8类时域特征来标识动静两种环境状态。
3.2.3 模型训练
系统实现监测功能的关键在于准确地判定特征数据是属于静态环境还是动态环境,从而得知目前的路况,可使用机器学习分类算法来训练数据特征分类器。相比以往的学习算法,XGBoost的损失函数引入正则化项,控制模型复杂度,防止模型过拟合,同时对损失函数进行二阶泰勒展开,使结果更加准确,且支持并行,降低模型计算,节省模型训练时间。因此,采用 XGBoost[17]对信道状态信息的特征进行训练,最终得到训练好的分类模型。
XGBoost 是在决策树的基础上采用了集成策略,利用梯度提升算法不断减小前面生成的决策树的损失,并产生新树构成模型,确保了最终决策的可靠性。XGBoost 的分类模型表示为
(1)

(2)

(3)

(4)

(5)
在模型训练过程中,使用交叉验证与网格搜索方法对XGBoost参数进行调优来选取最优模型。
4 实验方案
4.1 实验设置
在笔者提出的监测系统中,将只有一根天线的普通商用无线路由器作为发射器,装有 Intel5300 无线网卡的笔记本电脑作为接收器,发射天线与接收天线一直保持无线通信链路的连接,采集在同一区域内 Wi-Fi 链路数据包,并从中获取相关的信道状态信息用于后续的数字信号处理和模式识别。
马路上来往的车辆由于视线的阻挡无法得知胡同的路况,经常因为突然窜出的行人引起事故,而传统的摄像头、转角镜和传感器在深夜或天气恶劣时作用很小。因此,笔者选取深夜的胡同作为代表性的实验场景。设垂直于无线路由器与笔记本电脑连线方向的距离为d,根据胡同的空间大小以及Wi-Fi信号的覆盖范围,将距离d划分为[0,1 m]、(1 m,3 m]和(3 m,5 m]3个区间,给来往车辆在不同程度上预警。系统设置的采样率为1 000样本/秒,确保能捕捉到人体行为活动。
在每个距离区间内,测试人员呈现两类状态:一类是保持静止不动(静态环境),另一类是持续性做动作(动态环境)。
4.2 实验结果
4.2.1 特征提取结果
图2为特征提取的结果。
经过预处理后的信道状态信息数据是一个N×1的矩阵,其中N为信道状态信息数据的数量。利用长度为70、步长为30的滑动窗口计算各个时域特征,生成一个4 000×8的特征矩阵F,距离d为[0,1 m]的几个时域特征如图2所示。图中样本序号1~2 000的特征矢量属于静态环境,样本序号2 001~4 000的特征矢量属于动态环境。
从图2中可以观察到在虚线两端,来自静态环境的特征数据和来自动态环境的特征数据之间存在明显的差异。因此,系统可利用此特征矩阵F训练的分类模型正确识别出当前待测环境处于何种状态。
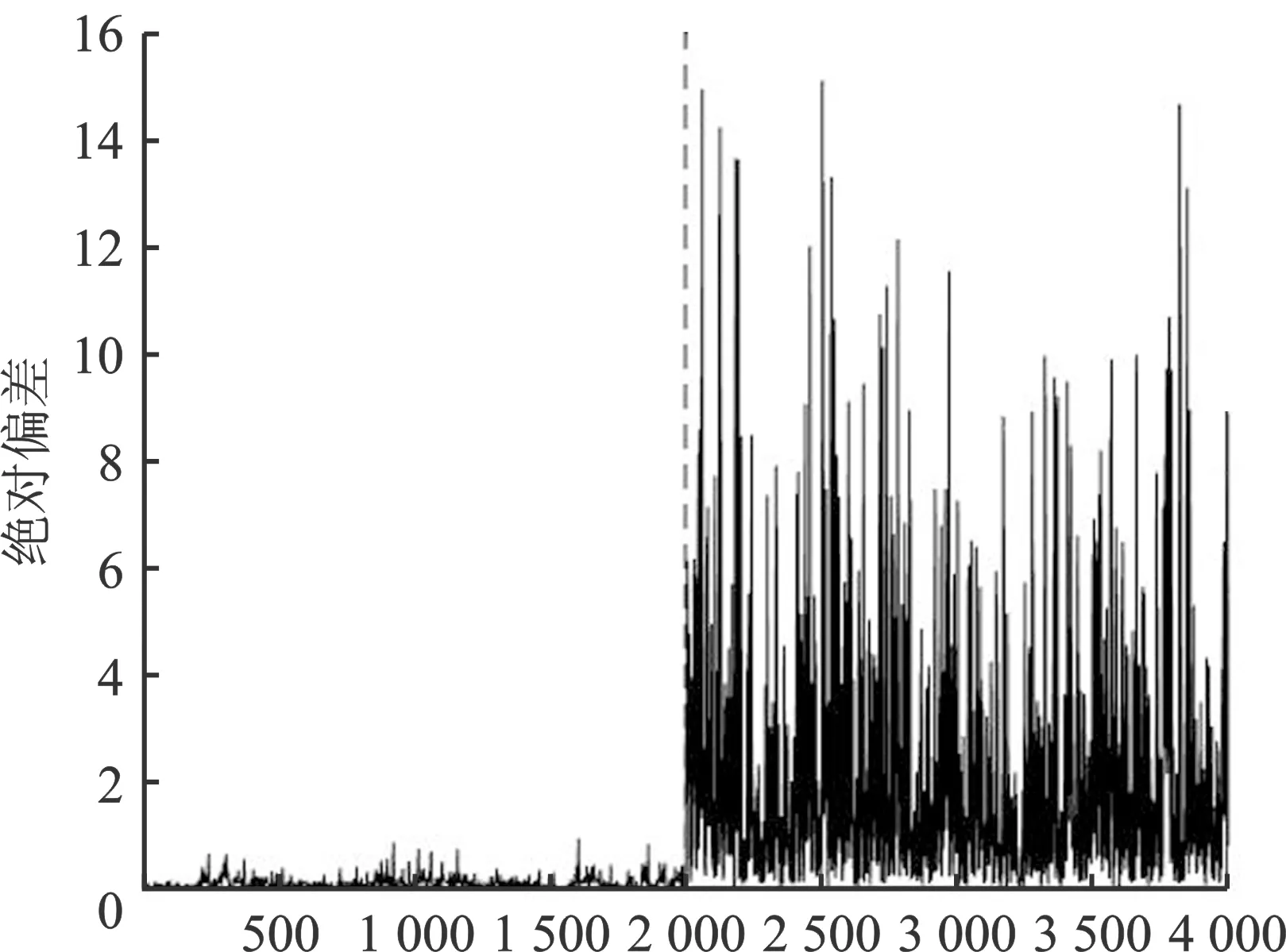
(a)中位数绝对偏差
4.2.2 模型训练预测
根据实验要求,将提取的4 000个数据按照4∶1的比例分为训练集和测试集;系统利用训练集训练识别模型,用测试集进行模型评估。表1中列出了各距离区间对应的系统识别精确度的具体数值,相应的数据直方图如图3所示。

图3 不同距离区间内系统识别精确度直方图
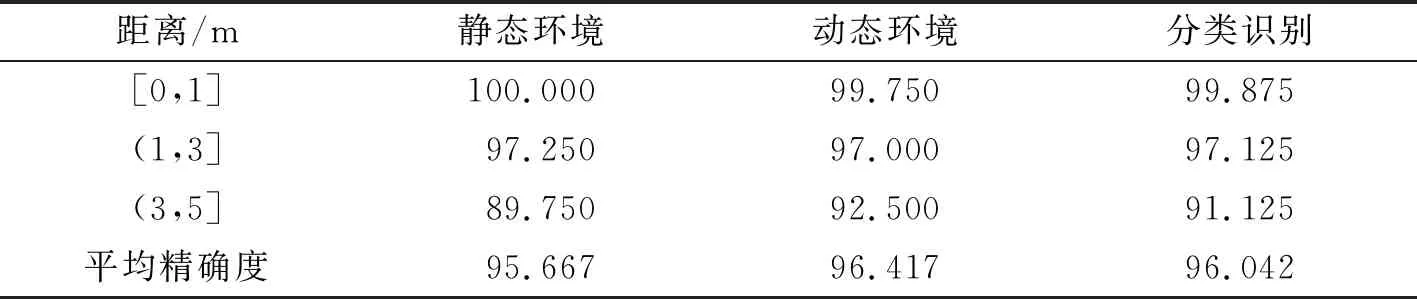
表1 不同距离区间内系统识别精确度数值 %
根据表1中的实验数据,不论是在静态环境下还是动态环境下,笔者设计的基于无线感知的人体行为识别系统的精确度随着距离的增加而减少,这是因为Wi-Fi信号强度会随着距离的增加而下降。随着距离的增加,系统的识别准确度也会随之降低。因为在动态环境下,Wi-Fi信号所携带的信道状态信息的幅度与静态环境下的幅度差异越小,分类的差错率越大,但是在5 m范围内,视野盲区监测功能的平均精确度也能达到约96.042%。
根据图3的走势进行分析可知,随着用户与检测设备之间距离的增加,系统识别的精确度降低,即系统的精确度与用户至检测设备之间的距离成反比关系,但是可以观察到精确度降低的幅度并不是很大。这是因为半径为 5 m的实际实验场景仍处于Wi-Fi 信号覆盖范围的中心,各距离区间内的人体行为对无线信号传播路径的影响差别不是很明显。
5 总 结
通过装有无线网卡的笔记本电脑与路由器构成通信链路,采集盲区路况数据,使用低通滤波器与主成分分析法滤除噪声、特征降维,利用具有代表性的特征进行XGBoost训练分类模型和交叉验证。结果表明,该系统的平均准确度达到96%以上,能有效地监测视野盲区,实现“视觉拐弯”。因为无线信号不会受到光线的影响,在深夜或者光线不足的地方也能很好地工作,解决了传统的视野盲区监测系统的一些限制因素,对公共交通安全的提升具有广泛价值。
未来,在将该监测系统投入到更复杂的实际应用环境之前,仍需要解决以下的一些问题和不足:
(1) 由于时间和实验场地有限,未来需选择更多不同类型的环境来验证该监测系统是否具有很好的鲁棒性,以及在具体场景下研究不同光照情况对系统的影响。
(2) 文中使用的无线信号是IEEE 802.11n协议标准的Wi-Fi信号,但是随着无线技术的发展,可以逐渐采用先进的802.11协议标准。为了解决兼容问题,利用新标准的先进特性提高无线感知系统性能是接下来研究的新方向。
(3) 本系统采用的Wi-Fi路由器是全向天线,车辆通过胡同口时也会产生多径效应,从而导致误判。在未来的研究中采用定向天线,效果可能更佳,更适用于实际场景。
(4) 本系统采用的接收器是装有Intel5300 无线网卡的笔记本电脑,实验设备体积稍大。未来可以将其小型化,制成形如FPGA嵌入式的模式。
目前,笔者设计的基于无线感知的视野盲区监测系统已经初步完成了概念化验证模型的搭建及小范围可控空间内的实验。就现在无线感知领域所取得的成果而言,可以预见其未来的应用前景非常广泛,在切实保障行人的出行安全以及有效降低视线盲区类的交通事故上有着重要的现实价值和社会意义。
