利用ADS-B精度比对法拟合相控阵雷达大角度误差曲线
2023-05-05姚小勇
姚小勇
(南京国睿防务系统有限分司 江苏省南京市 210039)
1 现状
现阶段的相控阵雷达多为高精端相控阵雷达[1],测角精度是其一项关重指标,大角度测角误差曲线的拟合是否精确,直接关系到该雷达测角精度的实现。
在外场标校由于测量波位较多,且需要不停转动阵面安装转台才能实现不同扫描波位的远场方向图数据采集,受限于测量阵面安装参数的仪表精度(3′),单个阵面多个测量波位之间的机械轴标校误差呈现随机性,雷达在不同波位的测角精度误差也呈现随机性,无法消除。
同时远场标较时由于外场电磁环境比较复杂,开展大角度测角误差数据测量时,雷达方向图受电磁干扰比较严重,采集的测角数据失真严重,导致大角度误差系数拟合曲线严重失真,测量结果反复多。
基于此,在研究分析ADS-B(广播式自动相关监视)技术及其在雷达测角精度比对中的精度量级后[2],总结提出基于ADS-B 技术的该型雷达大角度测角误差曲线拟合方法。
2 技术支撑
2.1 ADS-B测角精度分析
根据相关国军标标准,某一计量设备误差小于待测装备精度要求1/3 的,即可作为真值使用[3],从图1 可以看出,ADS-B 可以作为相控阵该系列的大角度测角误差曲线拟合用的真值。

图1:ADS-B 测角精度
2.2 相控阵雷达正弦空间测角技术
目前,采用比幅法单脉冲测角技术的相控阵雷达角敏函数均由“正弦空间(U-V 坐标)”内法向和差方向图幅度相比进行仿真拟合而来[3]。其优点是,各个扫描角度上的波束所给出的角敏函数的变化均表现为在U 轴和V 轴上的平移,其平移量为u0和v0。具体见公式:
仿真结果如图2所示。
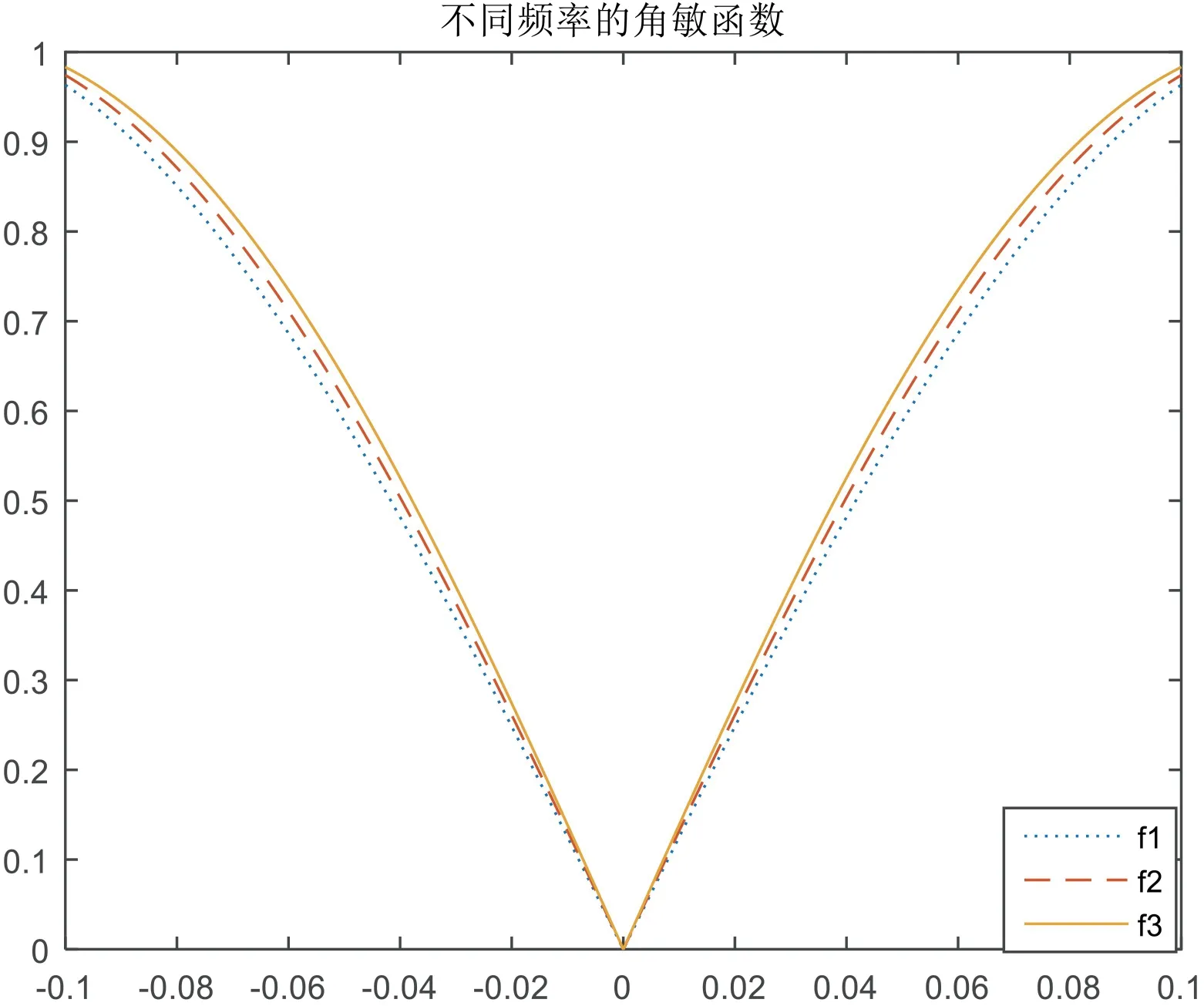
图2:不同频点的角敏函数
从图2 可以看出,频率不同,角敏函数不同,频率越高,角敏函数的斜率越大。所以,雷达大角度扫描误差系数拟合的目的即是按照频段划分,拟合出全频段大角度误差系数,实现频段内不同角度扫描时,各扫描角测角值的实时补偿,修正测角误差。
2.3 去除阵面安装误差
在利用ADS-B 数据拟合雷达测角误差修正前,要先对雷达因阵面单元位置误差和阵面变形及雷达姿势等原因产生的精度误差予以修正[4-7],根据对阵面安装误差对相控阵雷达测角精度的影响[8]对阵面安装误差进行修正,阵面安装误差解算公式为:
其中,T、E1、E2、Δσ、Δδ、Δγ分别为阵面安装倾角、目标仰角、横滚误差、阵面安装倾角误差、阵面法向误差,ΔAz1、ΔAz2、ΔEl1为目标以不同高度过法向时的方位测角误差[8]。
3 试验方法和步骤
3.1 航路规划
架设雷达,通过试验阵地的ADS-B 设备,观察不同方位、仰角、距离进出的民航航路,确保民航航路能够覆盖阵面扫描范围,为避免低角多路径效应对仰角测角的影响,观察录取仰角2°以上的民航航路,统计计算出阵面法向对应的方位。航路规划如图3所示。

图3:航路规划
3.2 数据处理方法
(1)将雷达方位扫描角数据相对于阵面法向Nt 作差(Az-Nt),得到雷达相对于阵面法向的扫描角范围。
(2)在Excel 软件中,以相对方位扫描角数据为横坐标,雷达数据与ADS-B精度比对的误差数据(ADS-B数据-雷达数据)作为纵坐标数据,绘制散点图,如图4 并进行三项式拟合。

图4:安装误差处理及大角度测量误差拟合示意图
(3)将其它比对数据按照步骤b)进行拟合,获得雷达完整的[‐45°45°]扫描角范围内误差值。
(4)利用公式(1)消除倾角、不水平度和阵面方位法向误差,并修正机械轴标定数据。
(5)统计不同频点的方位法向位置的方位和仰角测角误差值。
(6)以f0 对应的测角值作为系统差进行归零处理,在Excel 中以频点作为横坐标,测角误差作为纵坐标,画散点图,并进行三项式拟合,拟合系数即是方位/仰角的角敏函数修正系数,覆盖系统参数文件夹相关参数文件。
(7)选择工作频点f0(中频)时的覆盖阵面方位扫描范围的测角点迹数据再次进行重演,在[‐45°,45°]范围内对测角误差数据进行拼接,拼接完成的测角误差数据即是雷达在扫描范围内的大角度扫描误差数据。
(8)对大角度扫描误差数据在Excel 中画散点图,并进行三项式拟合,常数项作为系统差进行扣除,拟合后的系数即为大角度测角误差修正系数。
(9)数据处理完成后,覆盖系统参数的文件夹相关参数文件。
3.3 操作步骤
(1)通过试验阵地的ADS-B 设备,观察不同方位、仰角、距离进出的民航航路,确保民航航路能够覆盖阵面扫描范围,为避免低角多路径效应对仰角测角的影响,观察录取仰角2°以上的民航航路,统计计算出阵面法向对应的方位。
(2)将待测阵面法向转至相应的方位,并由质标人员标定出阵面的机械轴并将机械轴参数装入雷达。
(3)开发射以录取民航数据,选取不同高度经过阵面法向的数据,进行三项式拟合,利用参考文献[9]中机械轴安装误差验证公式核算机械轴安装参数是否有误差,并进行二次装订和复核。
(4)机械轴标定误差消除后,重复步骤3,根据大角度扫描误差测量需要的频点数量,以不同工作频率精跟经过阵面法向的民航目标,进行三项式拟合,分别得出不同频点对应的阵面法向位置的测角误差,并在频率域上拟合测角误差,得到角敏系数与频率关系曲线,将系数装订在雷达参数文件相应的位置。
(5)系数装订完毕后,雷达工作在某一频点,录取不同方位角进出阵面扫描覆盖范围的民航目标数据,利用ADS-B 进行精度比对,综合拼接出不同方位角上的测角误差,在“方位(相对阵面法向)--测角误差”域上进行大角度测角误差系数拟合,该拟合系数即使大角度扫描误差系数,将系数装入雷达相应的参数文件位置)。
(6)系数装订后,利用其它工作频点进行复核,无误后,以该系数作为模板,在其它阵面测试时,进行验证。
4 结论
经过仿真和试验验证,利用ADS-B精度比对法可以用于相应等级精度要求的相控阵雷达大角度误差比对修调。该方法已在多种型号多部雷达标校中得到充分验证,且该方法还适用于雷达阵地缺乏标校塔的雷达阵地大修后的标校。该方法在工程实践中有一定的实用价值。
