基于偏移角与欧式距离的声波驱动微粒控制算法
2023-04-29杨豪杜晓刚张衡王福海
杨豪 杜晓刚 张衡 王福海
摘要:控制算法作为声波驱动微粒技术中的重要环节,极大影响着驱动任务的完成精度与速度.然而,目前的声波驱动微粒控制算法由于难以选择最佳的驱动声波,导致其控制精度较低且速度较慢.为了解决该问题,本文将声波驱动过程中微粒运动的偏移角与欧式距离相结合,设计了一种控制速度快、精度高的声波驱动微粒控制算法.该算法通过偏移角和微粒当前位置与目标位置的欧氏距离来计算驱动度并评估声波驱动效果的优劣,然后选择驱动效果最优的声波来驱动微粒.实验结果表明,本文算法在多种不同驱动任务上均能得到良好的控制速度与精度,尤其在较复杂的多微粒驱动任务上性能提升更为明显.
关键词:声波驱动; 控制算法; 偏移角; 欧式距离
中图分类号:TP249文献标志码: A
Acoustic manipulation particle control algorithm based on the
offset angle and Euclidean distance
YANG Hao DU Xiao-gang ZHANG Heng WANG Fu-hai(1.School of Electronic Information and Artificial Intelligence, Shaanxi Joint Laboratory of Artificial Intelligence, Shaanxi University of Science & Technology, Xi′an 710021, China; 2.College of Mechanical and Electrical Engineering, Shaanxi University of Science & Technology, Xi′an 710021, China)
Abstract:The control algorithm is an important component in the technology of acoustic manipulation particle,which greatly affects the completion accuracy and speed of the driving task.However,the current manipulation particle control algorithm is difficult to select the best driving sonic wave,resulting in low control accuracy and slow speed.To address this issue,we propose an acoustic manipulation particle control algorithm with fast control speed and high accuracy by combining the offset angle and Euclidean distance of particles.The algorithm evaluates the acoustic driving effect by computing the driving degree using the offset angle and the Euclidean distance between the current position and the destination position,and then selects the acoustic driving particles with the best driving effect.The experimental results show that the proposed algorithm can achieve good control speed and accuracy in many different driving tasks,especially in the more complex multi-particle driving tasks.
Key words:acoustic manipulation; control algorithm; offset angle; euclidean distance
0引言
人類在生物工程、医学、精密光电子工程、集成电路芯片的认识已经达到微纳米级别.在这些微观领域,由于尺度效应的存在,传统的机械操作技术难以应用,操作任务需要借助微操作技术来实现,因此微操作技术对人类科技的发展具有重要的意义[1].
根据操作过程中是否与材料接触,微操作技术可以分为接触式与非接触式两类.接触式操作需要利用微夹持器与微粒进行接触,通过夹钳或吸附方式操作微粒[2].由于器件体积微小且构造薄弱,所以接触式操作通用性较差且操作风险较大.非接触式操作直接利用外力驱动微粒进行运动,减少了微粒损伤的可能性.常见的非接触式操作方法有:电磁法[3]、电场法[4]、激光法[5]、微流体法[6]和声波法[7]等.电磁法需要粒子具有磁性,然而实际操作中微粒大多是中性的,因此该方法适用范围较窄[3].电场法容易产生热效应,导致该方法难以应用于对环境温度敏感的特殊领域[4].激光法通过光束引力驱动微粒,由于光束位置单一导致其难以完成较为复杂的任务[5].微流体法对显微视觉检测和微力检测的要求较高,硬件依赖较大,对微粒的位姿检测和操控难以实现[6].声波驱动相较于其他驱动方法对于操作环境与材料的要求更低[7],因此在医学[8]、生物学[9]、芯片装配[10]等领域具有广泛的应用.
声波驱动的原理是让声波在物体表面产生驻波场,使微粒在驻波场的作用下移动,在相同的驻波场中,微粒总会聚集在特定位置,这些位置被叫做节点线[11].通过改变驻波场,让微粒在不同驻波场的节点线之间移动是一种常见的声波驱动方式[12,13],但其任务目标只能在节点线间变化.在文献[14]中提出了在节点线外进行声波驱动微粒的方法,这种驱动方法的任务目标灵活可变,驱动效率高,有着广泛的应用场景[15,16].
在声波驱动微粒的过程中,需要通过控制算法不断变换声波频率,不同声波频率会驱动微粒到达不同的位置,因此控制算法对驱动任务的完成有很大影响.文献[14]利用闭环控制算法操控多个微粒在节点线外到达预定的目标点;文献[15]实现了大规模微粒的图案排布,其通过不断地刚性变换改变微粒的目标点,最终让所有微粒到达预定的区域内;文献[17]设计了一种强化学习算法,能在无位移场模型的情况下实现简单的驱动任务.但目前的控制算法[14,17]并不能有效选取完成驱动任务的最佳声波频率,导致其控制精度与速度较低.针对该问题,本文提出了一种基于偏移角和距离相结合的声波驱动微粒控制算法.该算法将微粒与预设轨迹的偏移角、微粒与目标点的欧式距离相结合设计了一种新的驱动策略,该策略可以有效地选取最佳声波频率完成驱动任务.仿真结果表明,本文算法能有效改善控制速度与控制精度,并且针对复杂驱动任务的提升效果更加明显.
1本文算法
本节首先介绍本文算法的总体框架;然后提出基于偏移角与距离结合的驱动策略,并对策略思路进行阐述.
1.1本文算法框架
现有的驱动策略基于微粒在目标方向上的投影长度选取声波频率[14,17],但由于其未考虑初始位置,控制精度会随着时间的增长越来越差,且控制速度也并非最佳.为了更快速、准确地完成微粒驱动任务,本文提出了一种基于偏移角和距离相结合的声波驱动微粒控制算法.首先,设微粒的位置集合为状态S,声波频率为动作a.该算法采用闭环控制,其总体流程为:从初始状态Sinit开始,通过偏移角与距离结合的驱动策略combAngDiS来选取最佳动作a,通过执行选取的动作a驱动微粒到达新的状态S′,若S′与目标状态St不同,继续选取新的动作a驱动微粒,直到微粒到达目标状态St为止.本文算法流程如算法1所示.
1.2偏移角与距离结合的驱动策略
为了改善微粒驱动控制算法的控制精度和速度,本文将声波驱动过程中微粒与预设轨迹的偏移角、与目标点距离相结合提出了一种驱动策略.该策略通过驱动度r衡量声波驱动效果的优劣,每次选择驱动度最大的声波驱动微粒完成任务.驱动度的计算方法为:
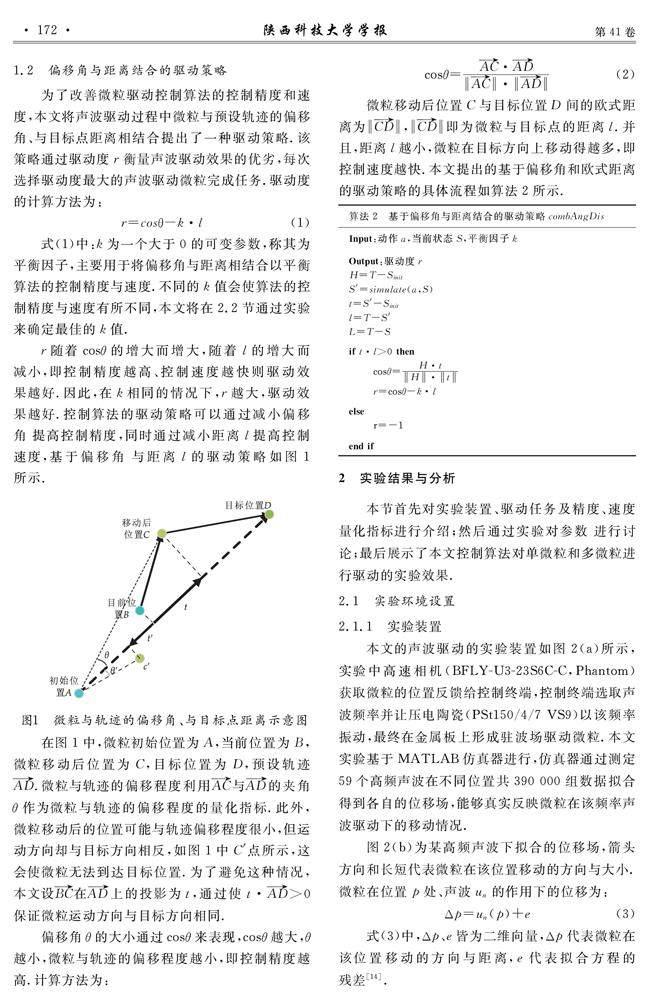
r随着cosθ的增大而增大,随着l的增大而减小,即控制精度越高、控制速度越快则驱动效果越好.因此,在k相同的情况下,r越大,驱动效果越好.控制算法的驱动策略可以通过减小偏移角 提高控制精度,同时通过减小距离l提高控制速度,基于偏移角 与距离l的驱动策略如图1所示.
2实验结果与分析
本节首先对实验装置、驱动任务及精度、速度量化指标进行介绍;然后通过实验对参数 进行讨论;最后展示了本文控制算法对单微粒和多微粒进行驱动的实验效果.
2.1实验环境设置
2.1.1实验装置
本文的声波驱动的实验装置如图2(a)所示,实验中高速相机(BFLY-U3-23S6C-C,Phantom)获取微粒的位置反馈给控制终端,控制终端选取声波频率并让压电陶瓷(PSt150/4/7 VS9)以该频率振动,最终在金属板上形成驻波场驱动微粒.本文实验基于MATLAB仿真器进行,仿真器通过测定59个高频声波在不同位置共390 000组数据拟合得到各自的位移场,能够真实反映微粒在该频率声波驱动下的移动情况.
2.1.2驱动任务设计
为了更好、更全面地体现控制算法的性能,本文设计了5个驱动任务,分别为m1、m2、m3、m4和m5,任务预设轨迹如圖3所示.
图3驱动任务示意图在图3中,红色虚线为预设轨迹,蓝色点为起始位置,绿色点为目标位置.微粒需要从初始位置开始,沿着预设的轨迹进行移动,最终到达目标位置.预设轨迹包含直线、折线、曲线三种线型.其中,完成直线轨迹只需要直接控制微粒到达目标位置即可;完成折线轨迹需要先控制微粒到达轨迹转折点,然后从转折点到达目标位置;完成曲线轨迹则需要处于轨迹上的一系列目标点,微粒从初始位置开始,依次到达每个目标点.
2.1.3性能评估
2.2最佳参数选取
2.3.1单微粒驱动任务
2.3.2多微粒驱动任务
在多微粒驱动任务中,由于微粒在驻波场中不同位置的位移大小、方向不同,因此多微粒驱动的精度难以控制,微粒数量越多,精度控制越困难.针对多微粒驱动任务m4和m5,分别利用偏移角驱动控制算法、距离驱动控制算法、投影驱动控制算法及本文算法(k=0.1)进行仿真,得到微粒运动轨迹如图6所示.
由图6可以看出:在驱动任务m4中,偏移角驱动控制算法控制结果与预设轨迹偏离程度最小,距离驱动控制算法与投影驱动控制算法的控制结果与预设轨迹偏离程度较大,本文算法的控制结果与预设轨迹的偏离程度很小.在驱动任务m5中,偏移角驱动控制算法与投影驱动控制算法无法完成驱动任务,距离驱动控制算法控制结果与预设轨迹的偏离程度较大,本文算法的控制结果与预设轨迹的偏离程度较小.图6利用不同控制算法实现多微粒驱动任务的控制结果 为了更好体现本文算法在多微粒驱动任务上的有效性,针对m4和m5,统计以上四种方法的控制精度与速度,结果如表2所示.
由表2可以看出:在多微粒驱动任务中,偏移角驱动控制算法控制精度高,但控制速度极慢,且随着微粒数量的增加,偏移角驱动控制算法无法完成驱动任务;距离驱动控制算法的控制速度很快,但控制精度很差;投影驱动控制算法的控制精度与速度都相对较差,且随着微粒数量的增多难以完成驱动任务.本文算法表现最好,控制精度不逊于偏移角驱动控制算法,控制速度与距离驱动控制算法也相差较小.因此,本文所设计的控制算法在多微粒驱动任务上表现良好,控制速度快且控制精度较高.
3结论
本文针对声波驱动微粒的控制算法进行研究,将微粒与预设轨迹的偏移角和微粒与目标点的欧式距离相结合,设计了一种基于偏移角和距离的控制算法,有效提升了驱动任务完成的速度与精度.分别针对单微粒与多微粒驱动进行仿真,结果表明,本文算法能够快速、准确地完成声波驱动微粒任务,具有良好的性能表现.此外,本文在二维的金属板上驱动微粒是声波驱动装置的一种,其他声波驱动装置如三维声悬浮器、流体内的微粒驱动,其位移场模型与本文类似,本文算法及思路也能有效地应用于这些声学驱动装置上.
参考文献
[1] 沈飞,徐德,唐勇建,等.微操作/微装配中微力觉的测量与控制技术研究现状综述[J].自动化学报,2014,40(5):2-8.
[2] 李杨民,汤晖,徐青松,等.面向生物医学应用的微操作机器人技术发展态势[J].机械工程学报,2011,47(23):1-13.
[3] S.Tasoglu,E.Diller,S.Guven,et al.Untethered micro-robotic coding of three-dimensional material composition[J].Nature Communications,2014,5(1):3 124.
[4] M.Krishnan,N.Mojarad,P.Kukura,et al.Geometry-induced electrostatic trapping of nanometric objects in a fluid[J].Nature,2010,467(7 316):692-695.
[5] D.G.Grier.A revolution in optical manipulation[J].Nature,2003,424(6 950):810-816.
[6] Tanyeri M.,Schroeder C.M.Manipulation and confinement of single particles using fluid flow[J].Nano Letters,2013,13(6):2 357-2 364.
[7] D.Foresti,M.Nabavi,M.Klingauf,et al.Acoustophoretic contactless transport and handling of matter in air[J].Proceedings of the National Academy of Sciences of the United States of America,2013,110(31):12 549-12 554.
[8] Mengxi Wu,Adem Ozcelik,Joseph Rufo,et al.Acoustofluidic separation of cells and particles[J].Microsystems & Nanoengineering,2019,5(1):32.
[9] Ma Z,Holle A W,Kai M,et al.Acoustic holographic cell patterning in a biocompatible hydrogel[J].Advanced Materials,2019,32(4):1 904 181.
[10] Bruce W Drinkwater.Dynamic-field devices for the ultrasonic manipulation of microparticles[J].Lab on a Chip,2016,6(13):2 360-2 375.
[11] Kai Melde,Eunjin Choi,Zhiguang Wu,et al.Acoustic fabrication via the assembly and fusion of particles[J].Advanced Materials,2018,30(3):1 704 507.
[12] A.Marzo,S.A.Seah,B.W.Drinkwater,et al.Holographic acoustic elements for manipulation of levitated objects[J].Nature Communications,2015,6(1):8 661.
[13] A.Marzo,B.W.Drinkwater.Holographic acoustic tweezers[J].Proceedings of the National Academy of Sciences of the United States of America,2019,116(2):84-89.
[14] Zhou Quan,Sariola Veikko,Kourosh Latifi,et al.Controlling the motion of multiple objects on a Chladni plate[J].Nature Communications,2016,7(1):12 764.
[15] Artur Kopitca,Kourosh Latifi,Quan Zhou.Programmable assembly of particles on a Chladni plate[J].Science Advances,2021,7(39):eabi7 716.
[16] Kourosh Latifi,Wijaya H,Quan Zhou.Motion of heavy particles on a submerged chladni plate[J].Physical Review Letters,2019,122(18):184 301.1-184 301.5.
[17] Kourosh Latifi,Artur Kopitca,Quan Zhou .Model-free control for dynamic-field acoustic manipulation using reinforcement learning[J].IEEE Access,2020,8:20 597-20 606.
【責任编辑:蒋亚儒】