基于数值模拟的某油船快速性虚拟试验
2023-03-31任海奎葛明臣杜云龙陈伟民董国祥
任海奎,葛明臣,杜云龙,陈伟民,董国祥
(上海船舶运输科学研究所有限公司 航运技术与安全国家重点实验室, 上海 200135)
0 引 言
快速性是船舶最重要的性能之一,尤其对于民船来说,快速性优劣在一定程度上直接影响着船舶的航行性能和经济性。近年来,随着民船市场的竞争日益激烈,各船公司和船舶科研机构为获得市场的认可,都在对船舶的快速性进行研究,使之满足行业和船舶所有人的要求。
模型试验和数值模拟是当前评估船舶快速性的2种主流方法[1]。近年来,随着高性能计算机的迅速发展,加上数值计算方法的不断改进,数值模拟技术得到了造船界研究人员的广泛关注和认可。目前有关船舶、螺旋桨[2]和舵耦合计算的研究已取得一定的进展。傅惠萍等[3]将非定常网格方法应用到了螺旋桨诱导的船体表面脉动计算中;沈海龙等[4]预报了均匀伴流场和非均匀伴流场中不同螺旋桨的水动力性能;胡健等[5]根据势流方法计算了舵的诱导流场及其对螺旋桨的影响;王超等[6]基于滑移网格和RNGk-ε(k为紊流脉动动能;ε为紊流脉动动量的耗散率)湍流模型对螺旋桨和舵的干扰性能进行了研究;杜云龙等[7]对某散货船整流导管的节能机理进行了研究。
本文采用计算流体动力学(Computational Fluid Dynamics,CFD)数值模拟技术对某油船的快速性进行虚拟试验研究,包括船模阻力性能研究、螺旋桨敞水性能研究和船模自航性能研究,为后续同类型船舶快速性虚拟试验的开展提供参考。
1 数值模拟方法
1.1 控制方程和湍流模型
本文研究的是流动问题,基本控制方程包括连续方程和动量方程。黏性不可压缩流体的连续性方程(质量守恒方程)和动量方程分别为
(1)
(2)
式(1)和式(2)中:ρ为流体密度;p为静压力;τij为剪切应力;ρfi为i方向的重力体积力。
为使方程组封闭,必须引入湍流模型。通过查阅相关文献发现,RANS方法结合Realizablek-ε湍流模型能较为准确地模拟船舶的流场特征。
在Realizablek-ε模型中,不可压缩流体的k和ε的输运方程为
(3)
(4)
(5)
(6)
式(3)~式(6)中:μt为湍动黏度;U*为特征系数。
1.2 计算域
在船模阻力计算中,计算域采用长方体形式,由于船体是左右对称的,故只对半船进行模拟;在螺旋桨敞水计算中,计算域采用圆柱形式,分成2部分,一部分是包含螺旋桨桨叶的旋转圆柱域,另一部分是该旋转圆柱域以外的静止域,采用滑移网格方法处理螺旋桨的相对旋转运动;在船模自航计算中,计算域采用长方体形式,分成2部分,一部分是包含螺旋桨桨叶的旋转域,另一部分是该旋转域以外的静止域,对整船进行自航计算,同时考虑自由液面的影响。
1.3 边界条件
1) 螺旋桨敞水计算中的计算域边界条件设置:
(1) 入口边界为向前距离螺旋桨盘面约10D(D为桨模直径),边界条件为速度入口,来流为均匀来流;
(2) 出口边界为向后距离螺旋桨盘面约20D,边界条件为压力出口;
(3) 圆柱面半径为10D,边界条件为对称边界;
(4) 在旋转域与外部静止域之间设置交界面。
2) 船模阻力计算和船模自航计算中的计算域边界条件设置:
(1) 入口边界为向前距离船尾约2倍船长,边界条件设置为速度入口,来流为均匀来流;
(2) 出口边界为向后距离船尾约2倍船长,边界条件为压力出口;
(3) 上边界为向上距离水面1倍船长,边界条件为滑移壁面;
(4)下边界为向下距离水面2倍船长,边界条件为滑移壁面;
(5) 两侧边界为沿船宽方向距离船舶中纵剖面约2倍船长,边界条件为对称边界;
(6) 在旋转域与外部静止域之间设置交界面。
1.4 网格划分情况
本文采用的网格有六面体网格(切割体网格)和四面体非结构网格2种。
1) 在船模阻力计算中采用六面体网格,对船体表面进行边界层网格划分,对船首、船尾和船体附近网格进行加密处理。由于该船模阻力计算考虑自由液面的影响,因此在自由液面区域进行网格加密。
2) 在螺旋桨敞水计算中采用混合网格形式,螺旋桨所在旋转域采用四面体非结构网格,旋转域以外的静止域采用六面体网格,这2个区域之间采用交界面进行数据交换。对桨叶表面的面网格进行加密处理。
3) 在船模自航计算中采用六面体网格,船首、船尾、船体附近和自由面的网格加密方式与船模阻力计算中的网格加密方式相同。为使螺旋桨所在旋转域与外部静止域之间进行数据交换的误差尽可能小,在二者的交界面处采用相同尺度的网格。对桨叶表面的面网格进行加密处理。具体网格划分情况见图1~图3。
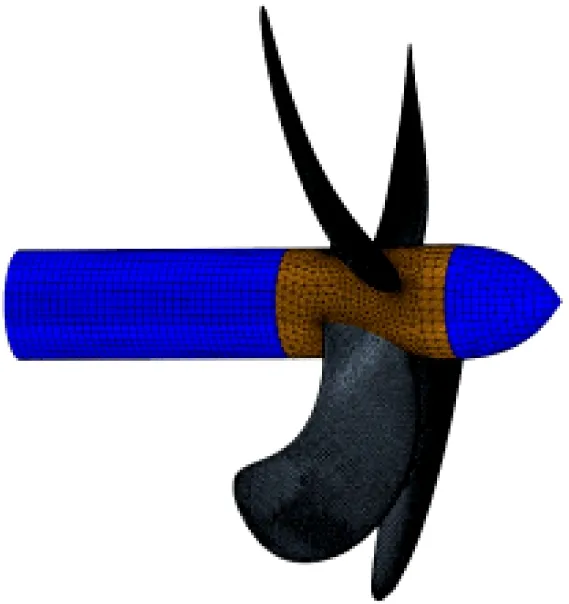
图1 螺旋桨敞水计算中的桨叶和桨轴表面网格划分情况
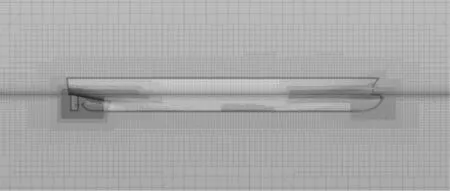
图2 船模阻力计算中的船体附近网格划分情况
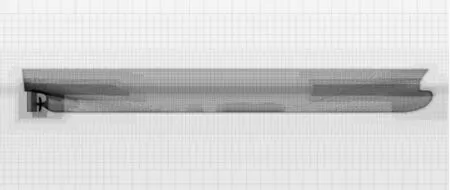
a) 船体附近网格划分情况
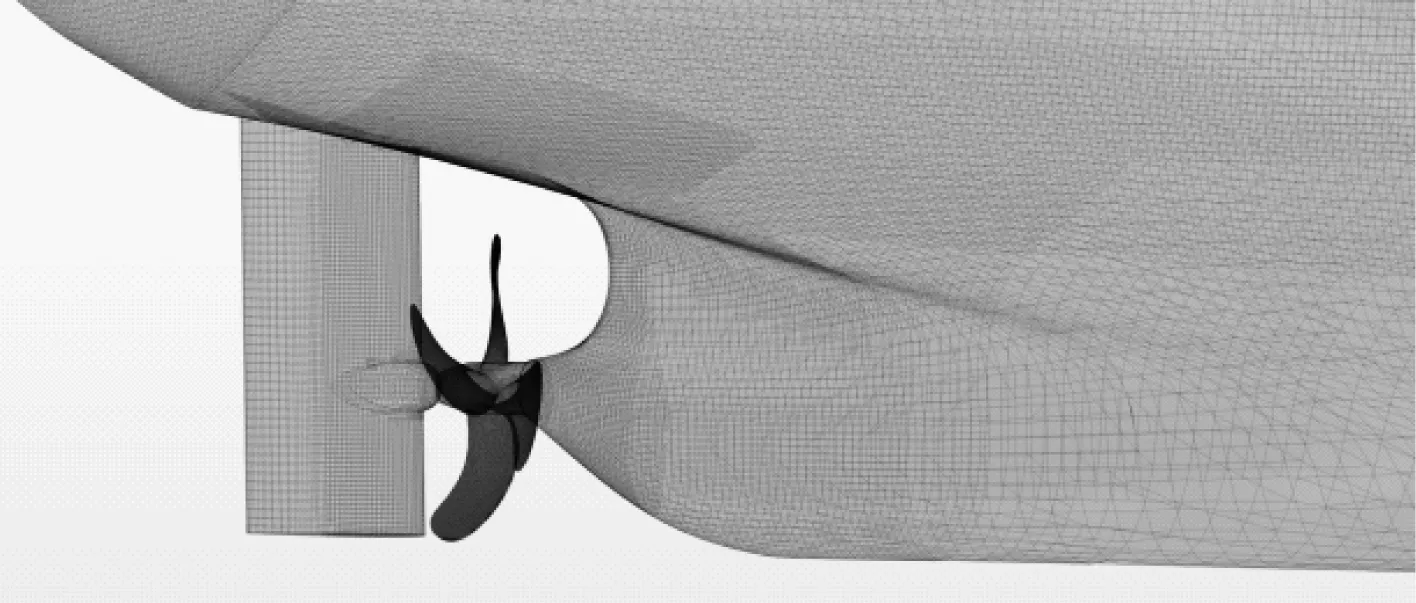
b) 桨叶和舵表面网格划分情况
1.5 主要计算参数设置
本文采用的湍流模型为可实现的k-ε湍流模型,压力与速度耦合计算采用SIMPLE方法进行。在船模阻力计算和船模自航计算中,采用VOF(Volume Of Fluid)方法捕捉自由液面,采用非定常的滑移网格方法处理螺旋桨的相对旋转运动问题。
2 研究对象
本文的研究对象为某油船,其船体、螺旋桨和舵(含舵球)的三维模型见图4。船舶模型和螺旋桨模型基本参数见表1。

a) 船体的三维模型

b) 螺旋桨的三维模型
c) 舵的三维模型
3 数值计算结果
3.1 螺旋桨敞水数值计算结果
对螺旋桨进行敞水性能数值计算,取进速系数J∈[0.3,0.7]进行虚拟试验研究,螺旋桨敞水性能(包括推力系数KT、扭矩系数KQ和推进效率η)的数值计算结果与模型试验结果对比见表2。图5为通过数值计
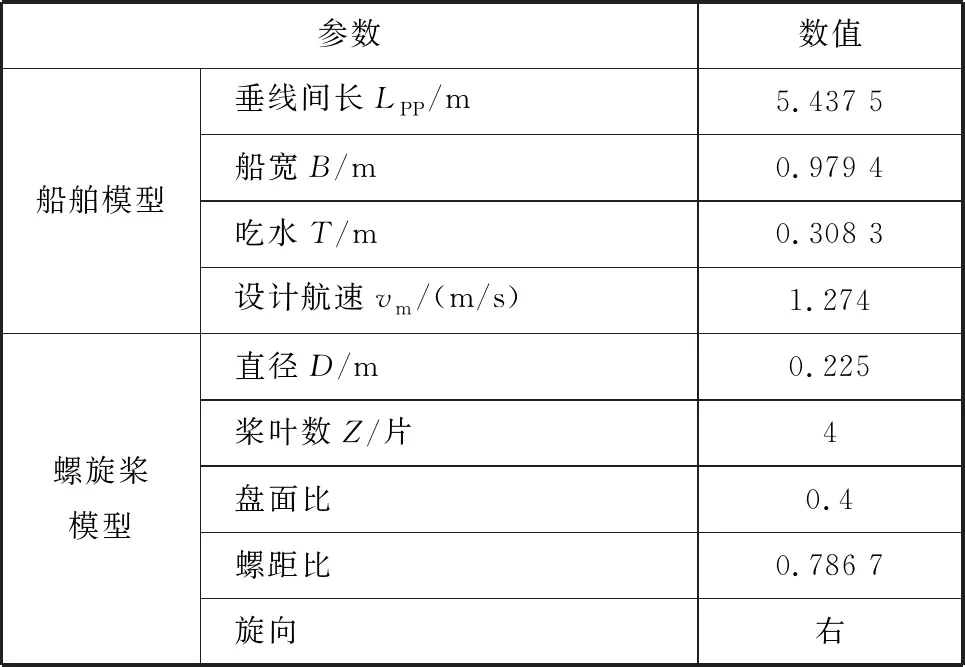
表1 船舶模型和螺旋桨模型基本参数
算与模型试验得到的螺旋桨敞水性能曲线对比,其中模型试验结果是由上海船舶运输科学研究所有限公司(以下简称“上海船研所”)拖曳水池给出的。图6和图7分别为螺旋桨敞水计算中的流线分布和中纵剖面压力分布(J=0.5)。
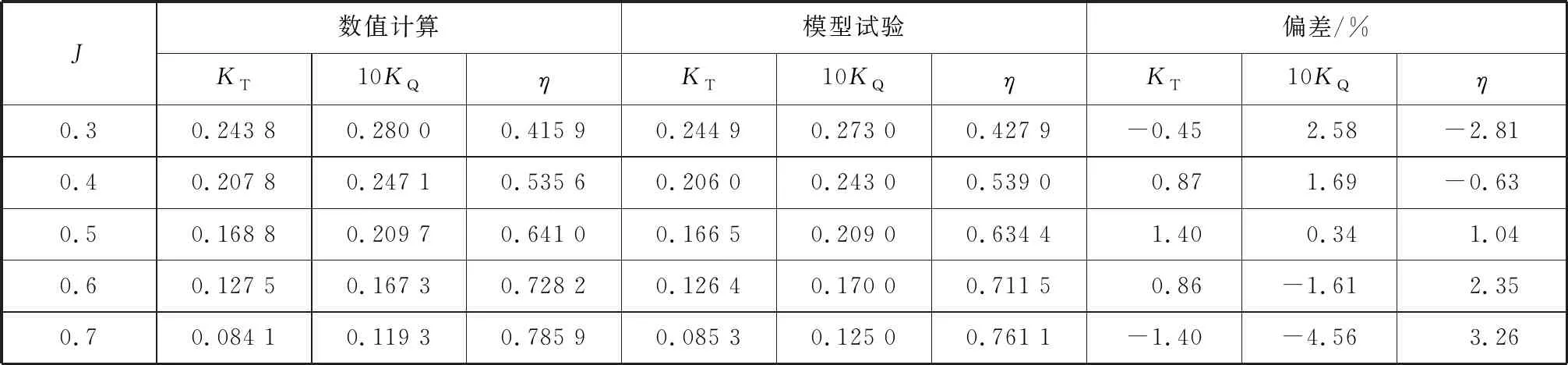
表2 螺旋桨敞水性能的数值计算结果与模型试验结果对比
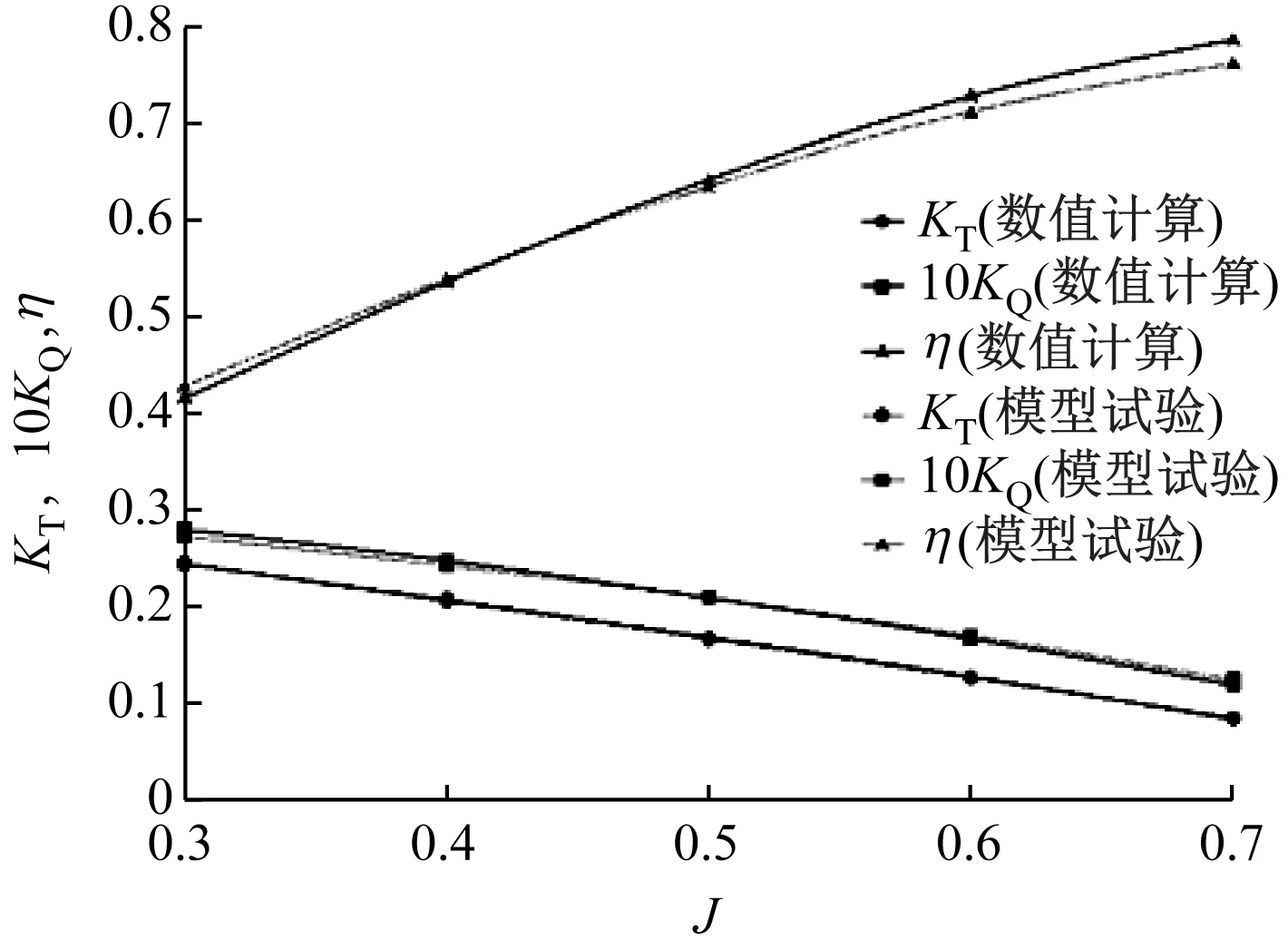
图5 通过数值计算与模型试验得到的螺旋桨敞水性能曲线对比
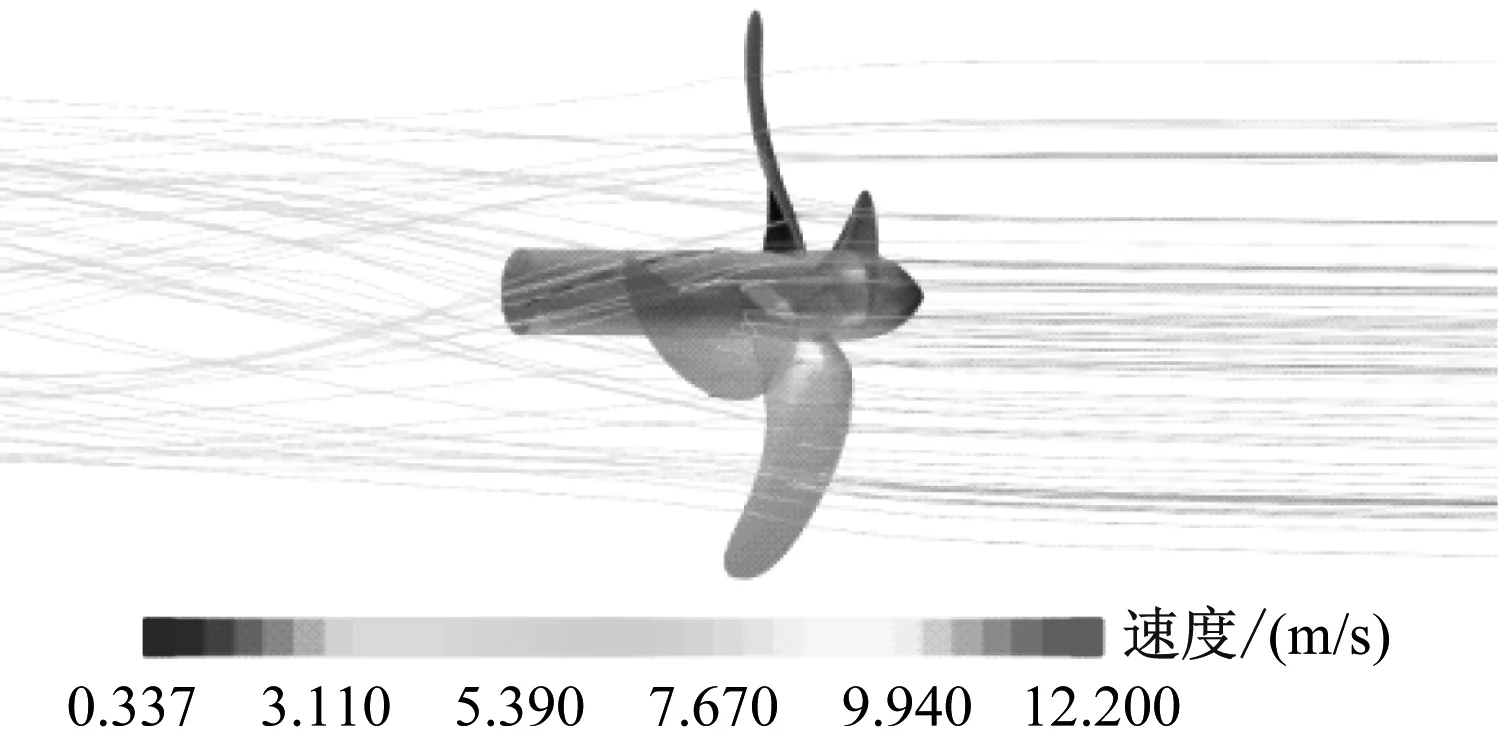
图6 螺旋桨敞水计算中的流线分布(J=0.5)
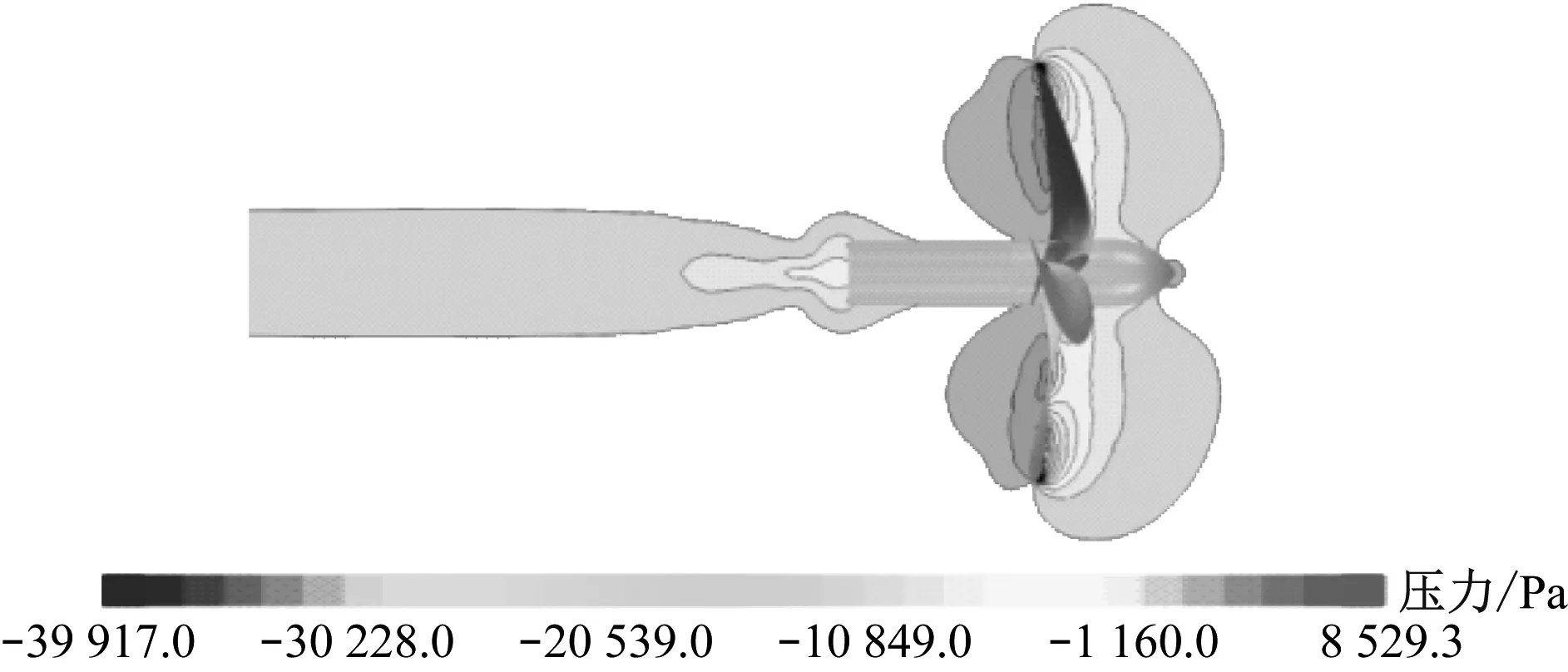
图7 螺旋桨敞水计算中的中纵剖面压力分布(J=0.5)
由表2可知:
1) 螺旋桨敞水性能的数值计算结果与模型试验结果的符合性较好,当J∈[0.3,0.6]时,螺旋桨推力系数、扭矩系数和推进效率的计算偏差均在3%以内,尤其是在设计工况J=0.5附近,数值计算结果与模型试验结果中推力系数、扭矩系数和推进效率的偏差均在1.5%以内。
2)J=0.7时的数值计算精度低于其他低进速系数工况,原因可能是当进速系数较大时,螺旋桨周围流场的流体流动更为剧烈,而当前RANS方程结合湍流模型的方法无法有效捕捉到真实的流场细节,导致数值计算结果的误差偏大。
3.2 船模阻力数值计算结果
对某油船(带舵)模型的静水阻力进行数值计算,取实际航速vs为11~15 kn,船模阻力数值计算结果与模型试验结果对比见表3。图8为通过数值计算与模型试验得到的船模阻力性能曲线对比;图9为不同航速下的船模阻力计算水面波形图。
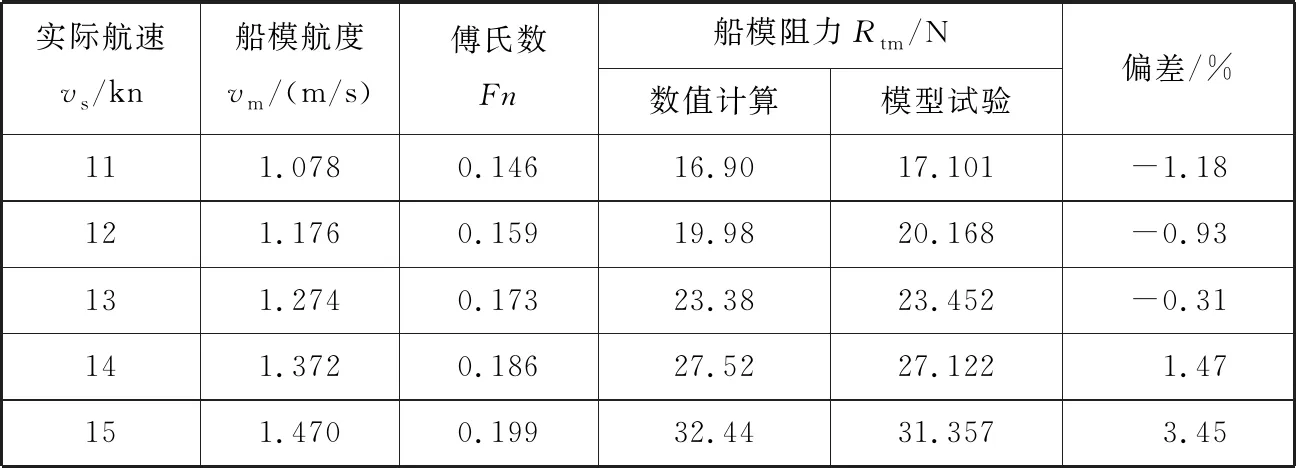
表3 船模阻力数值计算结果与模型试验结果
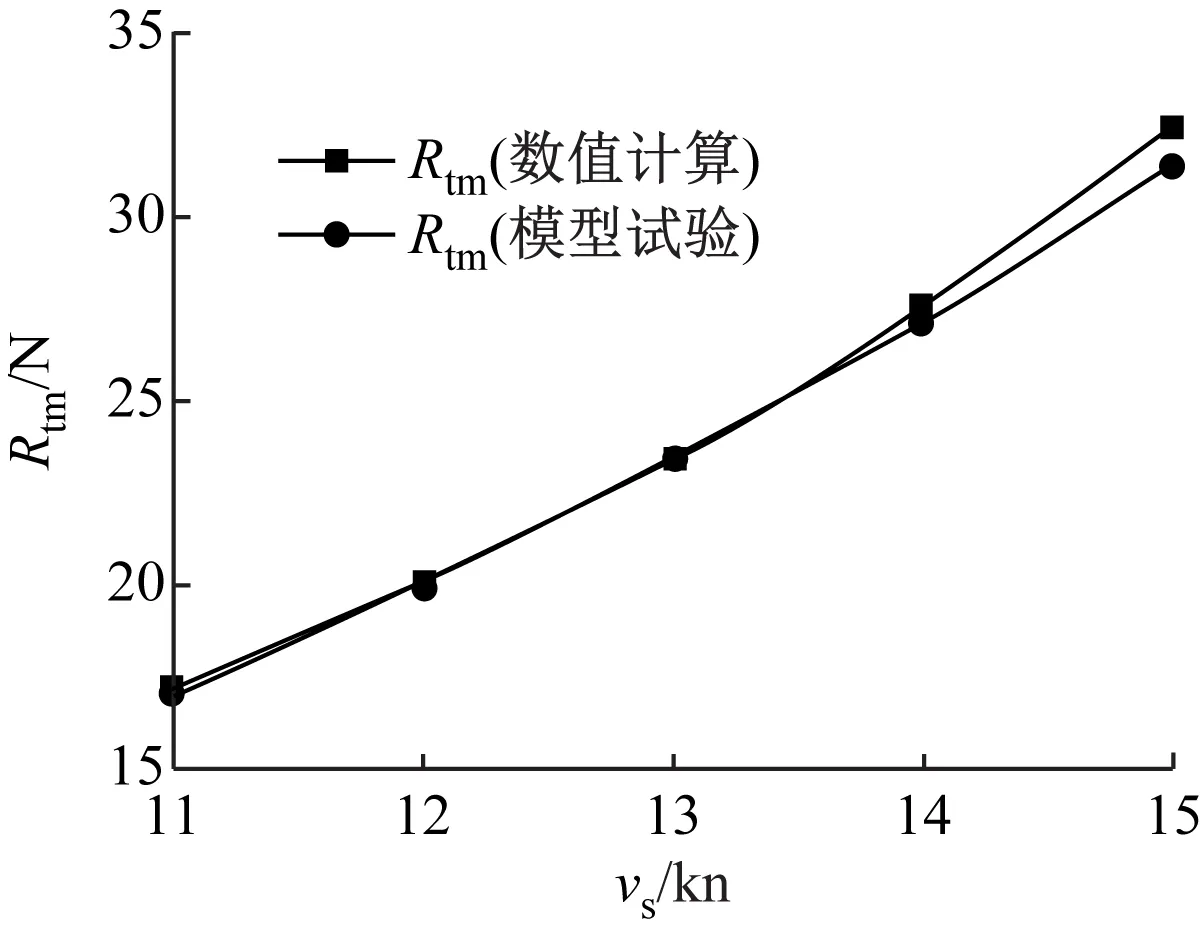
图8 通过数值计算与模型试验得到的船模阻力性能曲线对比
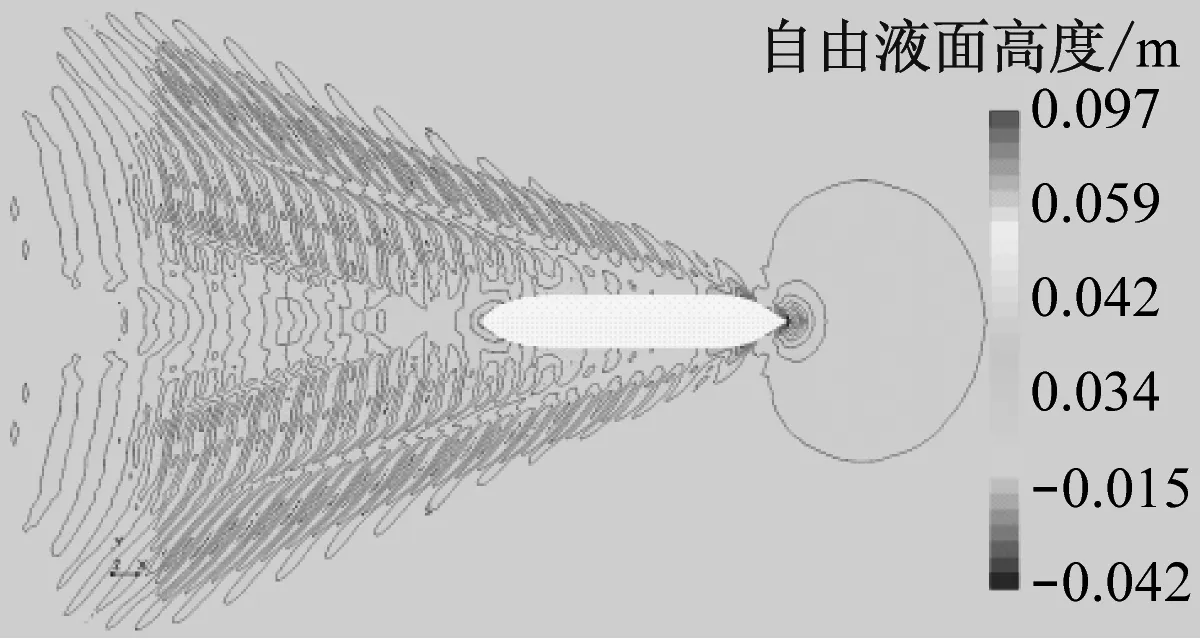
a) vs=11 kn,T=8.5 m
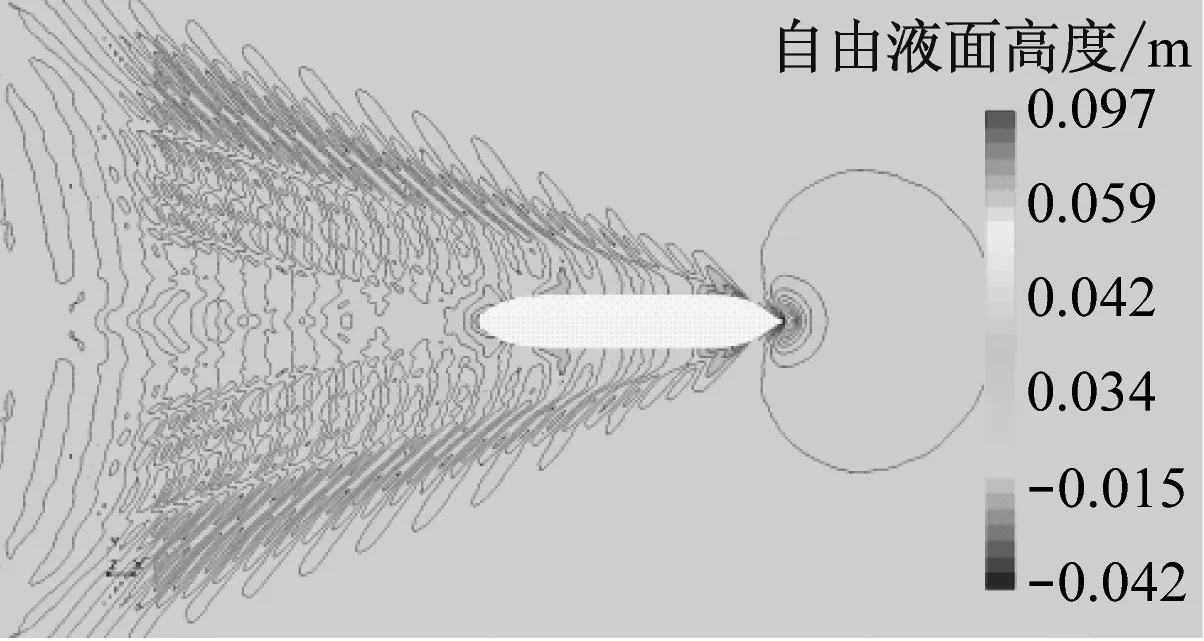
b) vs=12 kn,T=8.5 m
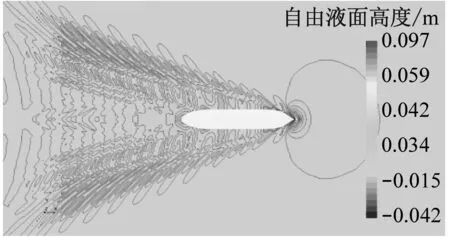
c) vs=13 kn,T=8.5 m
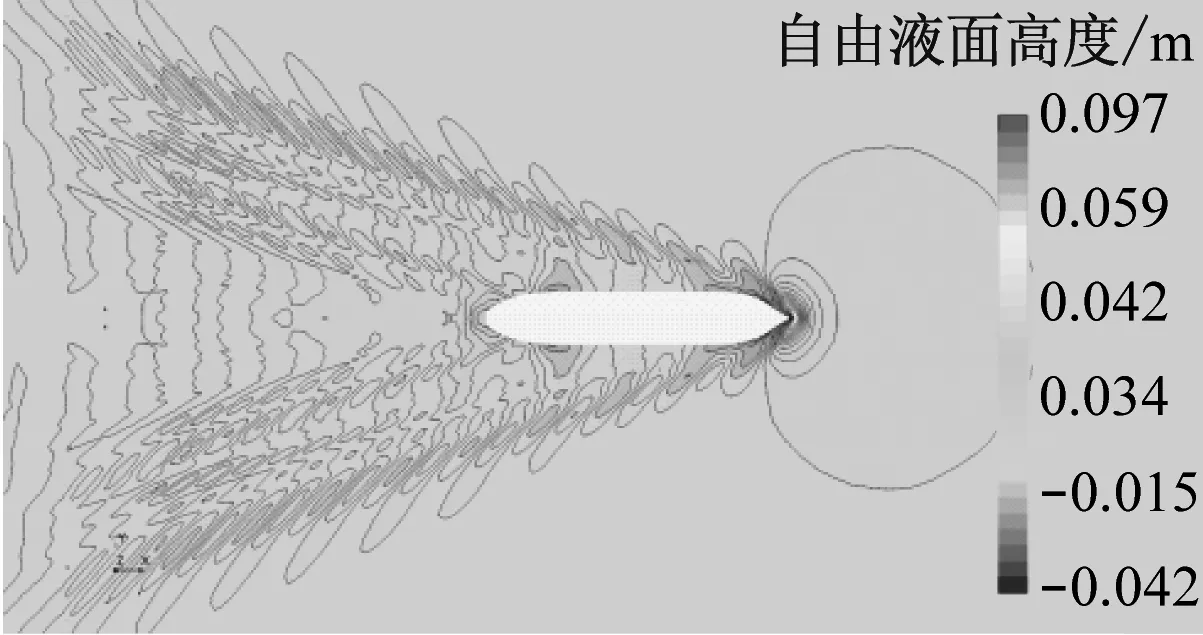
d) vs=14 kn,T=8.5 m

e) vs=15 kn,T=8.5 m
由表3可知:
1) 船模阻力数值计算结果与模型试验结果的符合性较好。当船舶航速为11~14 kn时,船模阻力的数值计算结果与模型试验结果的偏差均在2%以内,尤其是在设计工况vs=13 kn附近,数值计算结果与模型试验结果的偏差仅为-0.31%,说明从一定程度上看,船模阻力虚拟试验是船舶阻力性能评估的有效手段。
2) 当船舶航速为15 kn时,船模阻力数值计算结果与模型试验结果的偏差为3.45%。造成该现象的原因可能是本文采用的船模阻力计算策略是针对设计工况开发的,随着计算工况偏离设计工况(vs=13 kn)的程度逐渐增大,数值计算的精度逐渐下降。
3.3 船模自航数值计算结果
对某油船(带舵)船模的自航性能进行数值计算,取船模自航速度vm=1.274 m/s,螺旋桨转速分别为7.0 r/s和7.1 r/s。对计算结果进行分析,得到自航点的转速、螺旋桨推力、螺旋桨扭矩、推进效率、推力减额和伴流分数。船模自航数值计算结果与模型试验结果见表4。图10为vs=13 kn时船模阻力计算和船模自航计算中的艉部压力分布。

表4 船模自航数值计算结果与模型试验结果
由表4可知,船模自航计算中的转速、推力、扭矩和推进效率误差均在3.00%以内,船模自航数值计算结果与模型试验结果的符合性较好。
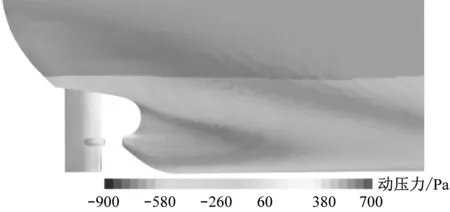
a) 船模阻力计算

b) 船模自航计算
4 结 语
本文利用CFD数值模拟技术对某油船的快速性进行虚拟试验研究,其中螺旋桨敞水试验、船模阻力试验和自航试验结果均由上海船研所拖曳水池得到。通过对船模阻力、螺旋桨敞水和船模自航性能进行数值计算,得到该船在自航状态下的推进性能。对比数值计算结果与模型试验结果可知,两者的吻合性良好。
当船舶航速在11~14 kn范围内时,船模阻力数值计算结果与模型试验结果的偏差均在2.00%以内,尤其是在设计工况vs=13 kn附近,数值计算结果与模型试验结果的偏差仅为-0.31%;当进速系数在0.3~0.6范围内时,螺旋桨敞水数值计算结果与模型试验结果中推力系数、扭矩系数和推进效率的偏差均在3.00%以内,尤其是在设计工况J=0.5附近,数值计算结果与模型试验结果中推力、扭矩和推进效率的计算偏差均在1.50%以内;在设计工况下,船模自航数值计算结果与模型试验结果中转速、推力、扭矩和推进效率偏差均在3.00%以内。
