基于相似构型决策的舰载机驾驶员建模与评估
2023-03-28刘晓雨孙立国谭文倩魏金鹏王维军焦俊凯
刘晓雨,孙立国,2,谭文倩,2,*,魏金鹏,王维军,焦俊凯
1.北京航空航天大学 航空科学与工程学院,北京 100191
2.北京航空航天大学江西研究院,南昌 330096
3.中国航空工业集团公司 沈阳飞机设计研究所,沈阳 110035
在舰载机的各个飞行阶段中,着舰是最为危险的一段。据统计,80%的舰载机事故发生在着舰阶段,舰载机舰上着舰的事故发生率是陆基着陆的3~6 倍。着舰的困难来源于2 方面,一是母舰运动、舰尾流等复杂海况影响[1-3],二是舰载机系统自身特性的限制,主要体现在舰载机构型设计的差异上,如果飞机的操稳特性不好,会增加驾驶员的工作负荷,从而影响飞行品质。目前针对母舰运动[4-6]、舰尾流[7-9]等影响开展的研究已经较多,而针对舰载机着舰过程中的驾驶员操纵行为建模及其工作负荷的评估等方面的研究亟待开展。
驾驶员模型可以描述驾驶员控制行为,进而能够与舰载机、航母和着舰环境形成闭环系统,方便进行飞行品质评价[10-11]、人机耦合特性分析[12-13]、机舰适配性研究[14]等,以降低人机不良耦合风险,提高飞行安全。目前对于驾驶员人工控制行为建模的理论和方法研究已经较多[15-19],Hess 和Watson[20-21]提 出 的 结 构 驾 驶员模型是其中的典型代表。针对舰载机人工着舰任务下的驾驶员操纵行为,考虑着舰环境的复杂性以及着舰过程精确控制要求,驾驶员操纵动作变得复杂多样,具有不确定性,导致其工作负荷增加,评估困难,目前相关研究较少。Hess 等[22-24]提出的结构驾驶员模型利用内反馈信号um作为衡量完成任务难易程度的依据,适用于研究舰载机着舰任务下的操纵负荷评估问题。文献[25-26]将该模型应用到了舰载机方面的相关研究中,但上述模型大多还集中在理论建模层面上,有必要开展更有针对性的研究。因此,基于驾驶员在环仿真实验建立舰载机驾驶员操纵行为模型。
新一代舰载机具有多种构型配置,即便是同一构型飞机,由于执行任务不同,燃油弹药消耗不同,返航着舰时的重量、气动力等也不可能完全一样[27]。因此在驾驶员建模时有必要考虑飞机构型变化的影响。文献[28]研究了飞机构型与驾驶员操纵特性的关系,并提出了基于试验数据库插值得到驾驶员模型的方法。但针对舰载机这样的特殊任务,构建试验数据库以及预测得到驾驶员模型仍缺乏相关研究。
针对舰载机着舰任务中的驾驶员操纵负荷评估问题,采用Hess 结构驾驶员模型形式[20],基于人在环仿真试验,采用频谱分析方法识别模型参数,该模型与理论模型相比有更高的精确度。考虑不同舰载机构型配置,构建舰载机构型库和相应的驾驶员模型库,提出基于相似构型决策的驾驶员模型匹配方法。利用结构驾驶员模型以及同一理论对复杂海况下的驾驶员着舰操纵负荷进行评估。
1 人工控制驾驶员试验建模方法
1.1 舰载机人工着舰任务中的人机闭环系统
对于驾驶员来说,实现舰载机在狭小的母舰甲板上安全着舰是一个复杂的操纵任务。海浪引发的舰船运动造成了着舰点及下滑光坡面的运动,舰尾流既包含了与距舰距离有关的周期性诱导分量又包含了随机性分量,以上二者为导致舰载机难以实现精确着舰的主要因素。为了帮助驾驶员控制,母舰上通过菲涅尔光学助降系统(Fresnel Lens Optical Landing System, FLOLS)实现高度下滑引导,而在距舰较近(末端决策段)时,驾驶员还需要综合跑道灯线指引信息,尤其是着舰指挥官(Landing Signals Officer, LSO)的指令。舰载机着舰物理示意图见图1。
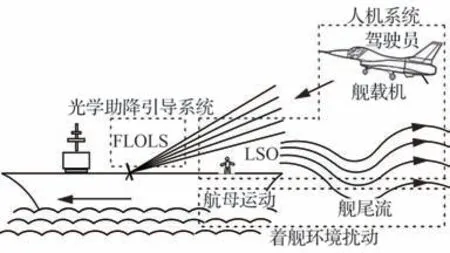
图1 舰载机着舰物理示意图Fig. 1 Physical diagram of carrier based aircraft landing
图2为舰载机着舰任务人机系统模型结构,其由复杂环境模型(甲板运动模型、舰尾流风扰模型)、目视引导系统模型(FLOLS 和LSO)、驾驶员模型、飞机和飞控系统动力学模型组成,其中对下滑道跟踪控制的驾驶员模型包括外环轨迹控制和内环姿态控制。着重研究内环姿态控制驾驶员模型的试验建模方法,外环轨迹控制特性采用McRuer 驾驶员模型[29]描述,而对油门控制的驾驶员模型则采用自动油门控制系统替代。另外,在本文中,基于成型滤波方法,以白噪声输入一个拟合的甲板运动近似传递函数来模拟甲板扰动运动;舰尾流则采用有人驾驶飞机的飞行品 质 标准MIL-HDBK-1797[30]中 所推荐的 工 程化模型。
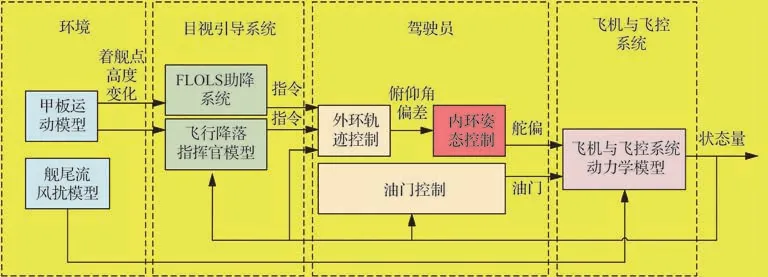
图2 舰载机着舰任务人机系统模型结构Fig. 2 Pilot-aircraft system model of carrier-based aircraft landing task
在现代飞行品质评价中更关注人机耦合特性,尤其是对于舰载机驾驶员,在复杂环境影响、高精度控制要求下,其工作负荷直接影响飞行品质评级。纵向俯仰跟踪任务中的人机闭环系统如图3 所示,舰载机在下滑过程中会受到如舰尾流风扰之类的干扰,但驾驶员会控制舰载机使其飞行状态仍能跟踪引导信号。因此,驾驶员与飞机之间密不可分,飞机特性将影响驾驶员的操纵行为,驾驶员的特性也会对飞行品质产生影响。

图3 纵向俯仰跟踪任务中的人机闭环系统Fig. 3 Pilot-aircraft closed loop system in longitudinal pitch tracking task
1.2 基于相似构型决策的驾驶员建模方法
文献[28]讨论了一种基于试验数据库的驾驶员试验建模方法。其好处是在缺乏空中飞行或地面模拟试验的条件下,能获得合理的驾驶员模型,这对飞机设计中预测飞行品质、避免人机不良耦合是有意义的。该研究认为,驾驶员对于具有不同特性飞机的操纵行为也不相同,而对于特性相似的飞机,驾驶员的操纵行为也相似。首先建立包含大量不同飞机特性的飞机构型库,然后基于驾驶员在环仿真试验,建立相应的驾驶员模型库,由此构成试验数据库。为了获得指定飞机构型的驾驶员模型,可以从试验数据库中提取相似构型对应的驾驶员模型,通过插值建立驾驶员预测模型。研究结果表明,该方法能够获得较好的建模结果。基于试验数据库预测驾驶员控制行为,文献[28]给出的驾驶员试验建模方法如图4[28]所示。
采用图4 所示方法建立舰载机着舰任务中的驾驶员人工控制模型,以满足舰载机着舰过程中的实际工程需要,分析飞行品质,降低着舰风险。该方法主要包括2 个内容:

图4 基于试验数据库的驾驶员建模方法[28]Fig. 4 Pilot modeling method based on experimental database[28]
1)构建合理的试验数据库。舰载机的着舰下滑轨迹要求精确控制,与常规飞机相比,舰载机应具有更快的响应速度和更高的控制精度。因此,飞机构型应限定在一定的短周期自然频率和阻尼比范围内,以保证构型选取的典型性。在此基础上完成驾驶员在环仿真试验以及驾驶员模型识别。
2)驾驶员模型预测。包括在飞机构型库中寻找与指定构型相似的飞机构型,并匹配对应的驾驶员模型。
2 着舰任务中的飞机构型库
建立试验数据库的关键要素之一就是舰载机着舰任务中的飞机构型库的建立。为了获得合理的驾驶员模型,飞机构型库应涵盖可能的舰载机特性范围,并且有一定的数量。
舰载机在着舰过程中应具有精确的俯仰姿态控制能力,在飞行品质规范中,可以采用操纵期望参数(Control Anticipation Parameter,CAP)准则评价飞机的俯仰跟踪特性。
2.1 CAP 准则简介及选取依据
CAP 常用来评价对飞机纵向短周期运动的操纵响应要求。CAP 定义为升降舵阶跃输入的初始俯仰角加速度q̇0与稳态过载Δnss之比(见式(1)),即对于一个精确控制任务的要求,驾驶员需根据飞机的初始反应q̇0来推测和估计其最终的过载响应Δnss。当CAP 过小时,驾驶员会推测出操纵量不足,因而加大操纵量,产生过操纵;当CAP 过大时,驾驶员会推测出操纵已过量,因而会减小操纵量,倾向于操纵不足。
舰载机着舰任务要求驾驶员在短时间内迅速做出反应,完成对3.5°下滑道的精确跟踪控制。通过升降舵对俯仰姿态的控制可以改变机头的指向,进而间接控制轨迹,因此对于升降舵输入的俯仰姿态响应要求至关重要。而CAP 是评价俯仰轴操纵的一个非常重要的参数,因为驾驶员感觉是明确的,且工程人员清楚该参数对飞机设计的具体要求。
在有人驾驶飞机的飞行品质规范(MILHDBK-1797)[30]中,CAP和短周期阻尼比ξsp一起构成了CAP 准则,其中ξsp是用来表示对短周期运动的衰减要求。不同类型的飞机在不同的飞行阶段的飞行品质等级边界不同,但形式类似。着舰任务属于C 种(场域)飞行阶段,此时对于CAP 和ξsp的指标要求,采用如图5 所示的品质等级边界。
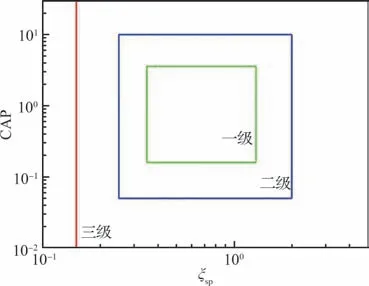
图5 C 种飞行阶段品质等级边界Fig. 5 Class C flight phase quality level boundary
由图5 可知,一级飞行品质要求飞机的CAP在0.16~3.60,阻尼比在0.35~1.30; 二级飞行品质要求飞机的CAP 在0.05~10.00,阻尼比在0.25~2.00;三级飞行品质在舰载机着舰任务中不被允许。
2.2 基于增稳系统的舰载机构型库设计原理
忽略自动器动力学特性和平尾升力的情况,可以推导CAP 的近似计算公式。已知初始俯仰角加速度为
式中:Δδe为升降舵偏角的变化量;Mδe为俯仰力矩对升降舵偏角δe的导数;Iy为y轴惯性矩。稳态过载可以根据传递函数求出。
力矩平衡条件为
式中:Δα为迎角的变化量;Mα为俯仰力矩对迎角的导数。
由式(3)可得
由此,稳态过载可以写成式(5)的形式:
式中:W为飞机质量;ΔL为升力的变化量;Lα为升力对迎角的导数。
式中:ωsp为短周期频率。
式中:n为过载;α为迎角。
已知n/α∝CLα,ωsp2∝Cmα,即
式中:Cmα、Cmq、CLα则分别为俯仰力矩系数对迎角的导数、俯仰力矩系数对俯仰角速度的导数以及升力系数对迎角的导数;S为翼面积;cˉ为平均气动弦长;μ1为飞机的相对密度;q为俯仰角速度。式(9)括号内反映机动点和重心之间的距离,可以近似按焦点和重心来考虑。下面将讨论ωsp2与静稳定裕度的关系,因此可以忽略括号内后一项动导数的影响,得到
式中:Kn为静稳定裕度。Kn大于0 时,表示焦点在重心之后。Kn增加,则CAP 也随之增加。
根据CAP 飞行品质要求设计SAS(Stability Augmentation System, SAS)纵向增稳控制系统,图6 为带增稳控制器的飞机被控对象模型。
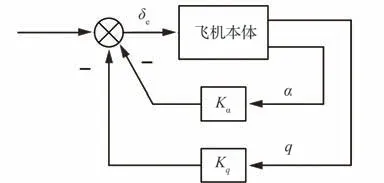
图6 带增稳控制器的飞机被控对象模型Fig. 6 Aircraft controlled object with stabilization controller
如果按照理想控制器分析,并且暂时忽略滤波器的作用,得到控制方程为
式中:Kq、Kα为俯仰角速度和迎角对升降舵(平尾)偏度的反馈增益,Kq>0,Kα>0。附加的气动导数增量为
从力学的观点看,通过反馈的作用将部分操纵效能转换成了相应的俯仰阻尼力矩和静稳定力矩,从而改善了飞行模态特性。因此,通过反馈迎角和俯仰角速率信号可以改变CAP 和ξsp的量值,从而模拟不同的俯仰姿态控制特性。因此针对同一飞机本体,通过引入不同的SAS 设计形成不同的飞机构型,进而形成图4 所示的飞机构型库。
2.3 舰载机着舰任务中的飞机构型库
在一级和二级飞行品质范围内选取25 个典型飞机构型,如图7 所示,组成飞机构型库。
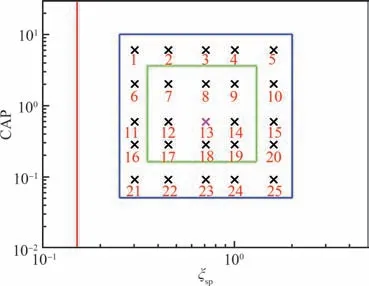
图7 25 个构型的飞机构型库Fig. 7 Model library of 25 configurations
虽然25 个构型分属2 个飞行品质等级,但是在准则图的不同区域内,飞机的俯仰姿态响应特性并不相同。例如构型1、构型5、构型21 和构型25 均属于二级飞行品质,但构型1 的CAP 偏大,阻尼比偏小,容易引起飞机振荡,驾驶员倾向操纵不足;构型5 的CAP 偏大,阻尼比偏大,驾驶员倾向操纵不足;构型21 的CAP 偏小,阻尼比偏小,驾驶员容易操纵过量,容易引起振荡;而构型25 的CAP 偏小,阻尼比偏大,驾驶员容易操纵过量,飞机响应迟缓。
算例飞机在着舰过程中的本体动力学特性可以采用以下小扰动线化方程进行描述:
式中:相对于基准运动状态的纵向状态变量x=[ΔV,Δα,Δq,Δθ,Δh]T,其中,ΔV为速度的扰动量;Δα是迎角的扰动量;Δq是俯仰角速度的扰动量;Δθ是俯仰角的扰动量;Δh为高度的扰动量。飞机的纵向控制变量u=[Δδe,ΔδPL]T。Δδe是水平尾翼的偏转量;ΔδPL是发动机油门杆的的偏转量;矩阵A为舰载机的状态矩阵;矩阵B为舰载机的控制矩阵。
算例飞机的基准运动取为定直下滑状态,配平速度Vtrim=68.6 m/s,配平下滑角γtrim=-3.5°,配平迎角αtrim=11°。
由于系统本身是不稳定的,因此可根据飞行品质要求设计SAS 纵向增稳控制系统,通过反馈迎角和俯仰角速率信号来改善短周期特性。一般用短周期近似模型来进行增稳控制系统设计。
式中:xsp为飞机的状态变量,且xsp=[Δα,Δq]T,即只保留了迎角和俯仰角速度;Δδe为升降舵偏角;Asp为短周期状态矩阵;Bsp为短周期控制矩阵。式(14)是一个二阶系统。
带增稳控制系统的状态空间模型为
式中:Ksp为迎角和俯仰角速率的状态反馈增益矩阵,Ksp=[Kα,Kq]T。可以采用极点配置的方法计算反馈增益,得到迎角反馈增益Kα=-10.918 3,俯仰角速率反馈增益Kq=-3.349 7。此时短周期 频 率ωsp=3.500 4 rad/s,阻尼比ξsp=0.707,满足一级飞行品质要求。
算例飞机的质量W和气动导数Lα是已知的,利用CAP 的计算式(7),可以求得CAP=0.586 4。在CAP 准则边界图中标出带控制器的算例飞机位置,见图7 中的构型13。
通过调 整SAS 的 反馈值Kα和Kq,可以得 到图7 中其余24 个不同的飞机被控对象特性,也就是具有不同CAP 和ξsp的飞机,见表1,其中第i个构型用WCi表示。

表1 25 个构型的模型相关参数与CAP 值Table 1 Model-related parameters and CAP values of 25 configurations
2.4 构型库的验证与分析
为验证构型选择的规律性与正确性,对不同CAP 或不同阻尼比ξsp下的飞机被控对象的bode图进行对比。
以飞机构型13 的纵横向对比为例,图8 为选取的相同CAP 不同ξsp的飞机构型,分别为WC11,WC12,WC13,WC14,WC15。图9 为 这5 个 飞 机构型对应的bode 图,可以看出,从构型11~构型15,随着阻尼比的增加,飞机系统的幅值逐渐减小,幅频特性曲线的鼓包也逐渐消失。而相角则随着阻尼比的增加逐渐趋于平缓,且5 个构型的相角有同一交点。即在交点频率之前,随着阻尼比的增加,飞机系统的相角逐渐减小;在交点频率之后,随着阻尼比的增加,飞机系统的相角逐渐增大。
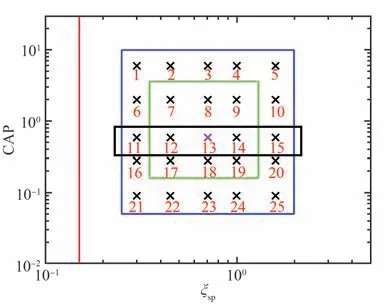
图8 相同CAP 不同ξsp 的飞机构型Fig. 8 Aircraft type with same CAP but different ξsp

图9 相同CAP 不同ξsp 的飞机幅相曲线对比Fig. 9 Comparison of amplitude and phase curves of aircraft with the same CAP and different ξsp
图10为选取的相同ξsp不同CAP 的飞机构型,分别为WC3,WC8,WC13,WC18,WC23,图11 为这5 个飞机构型对应的bode 图,可以看出,从构型3~构型23,随着CAP 值的减小,飞机系统的幅值逐渐增大,幅频特性曲线的的弯曲程度也逐渐增大。而相角则随着CAP 值的减小逐渐减小,且5 个构型的相角均没有交叉。

图10 相同ξsp 不同CAP 的飞机构型Fig. 10 Aircraft type with same ξsp but different CAP
由图8~图11 可知,不论是相同CAP 不同ξsp的飞机,还是相同ξsp不同CAP 的飞机,其都具有一定的规律性,其幅相特性均随着CAP 或ξsp的变化而逐渐变化。因此,在飞机构型13 周围取点作为构型库是合理的。

图11 相同ξsp 不同CAP 飞机幅相曲线对比Fig. 11 Comparison of amplitude and phase curves of aircraft with the same ξsp and different CAP
3 驾驶员模型库
3.1 驾驶员在环仿真试验
基于驾驶员在环仿真试验,可以研究不同的飞机被控对象特性下的驾驶员控制行为特征,辨识驾驶员模型,由此可以研究飞行品质。
本次试验在北京航空航天大学飞行力学实验室的工程型固基模拟器上进行,如图12 所示。

图12 地面固定基座飞行模拟器Fig. 12 Ground fixed base flight simulator
在进行驾驶员在环仿真试验之前,需要根据所研究的问题设计仿真试验方案。在舰载机着舰过程中,驾驶员需要精确控制飞机的俯仰姿态,使其保持在理想下滑道上飞行。俯仰跟踪控制任务下的人机系统结构如图13 所示。其中,ϑc和ϑ分别代表俯仰角指令和实际俯仰角;试验中ϑe代表俯仰角跟踪误差,也是驾驶员的输入信号;δe代表驾驶杆位移或者舵偏角,是驾驶员的输出信号。

图13 试验方案设计Fig. 13 Experimental design
试验中的飞机被控对象取2.3 节中建立的25 个构型。在下滑过程中舰尾流风场扰动以及甲板运动都会使飞机偏离下滑道,在试验中用指令信号ϑc来模拟环境的影响,其是由计算机生成的、具有一定带宽的随机噪声信号。由于在单通道控制任务中,驾驶员的注意力仅集中在1 条通道上,因此输入指令带宽可以比多通道任务更宽一些,这里将输入信号带宽选为0.5 Hz。
在飞行模拟器上完成俯仰跟踪任务时,飞机的实际俯仰角ϑ是通过对被控对象模型的实时计算获得的,主控计算机计算俯仰角误差ϑe=ϑcϑ,并将其通过综合平显或地平仪显示给驾驶员。驾驶员利用驾驶杆或者驾驶盘实施控制,给出控制输出δe。在补偿控制任务中,驾驶员的控制目的就是消除俯仰角跟踪误差ϑe,从而实现对俯仰角指令ϑc的跟踪。参与试验的驾驶员应该具有基本的操纵技能,能够熟练、有效、积极地完成控制任务。
3.2 驾驶员描述函数识别
基于驾驶员在环仿真试验结果,应用相关技术功率谱分析方法,可以识别驾驶员描述函数模型。在此基础上可以进行驾驶员数学模型辨识。
根据文献[28],对于图2 所示的人机闭环控制系统,依照相关技术和频谱方法,可由式(16)~式(17)计算驾驶员模型的描述函数YP(jω)和相干函数ρ2(ω)。
式中:Scu(jω)为系统输入c和驾驶员输出u之间的互谱,ω为频率;Sce(jω)为系统输入c和误差e之间的互谱;Scc(ω)、Suu(ω)分别为系统输入c和驾驶员输出u的自谱。ρ2(ω)表示描述函数的识别精度。
相干函数0 ≤ρ2(ω)≤1,其越接近1,表明线性相关性越高,说明用式(16)表示的驾驶员非参数模型越准确。因此可以用拟线性模型的识别方法,对系统进行识别。ρ2(ω)在不同的频率范围取值不同,这反映了在不同频率范围试验数据的精确性不同。
图14 为构型11~15 的驾驶员描述函数。由图14 可知,为了保证系统稳定,随着阻尼比的减小,驾驶员操纵的幅值趋向于逐渐减小,相角没有明显变化。
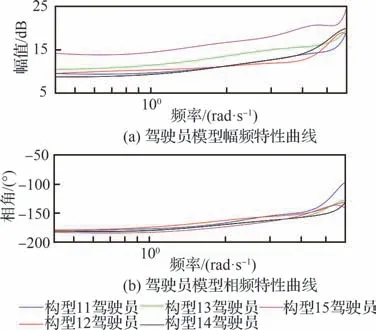
图14 相同CAP 不同ξsp 飞机构型对应驾驶员模型Fig. 14 Pilot model corresponding to aircraft configuration with same CAP and different ξsp
图15为构型3、8、13、18 和23 的驾驶员描述函数。由图15 可知,随着CAP 值的减小,驾驶员模型的幅值逐渐减小。相角曲线则分成了2 部分,第1 部分是构型3 和构型8 的驾驶员模型,两者的相角差别不大;第2 部分是构型13、构型18和构型23 驾驶员模型,三者的相角差别不大。但总体来说,构型13~构型23 的CAP 值比构型3和构型8 的CAP 值要小,所以总体上驾驶员模型相角随CAP 值的减小而减小。
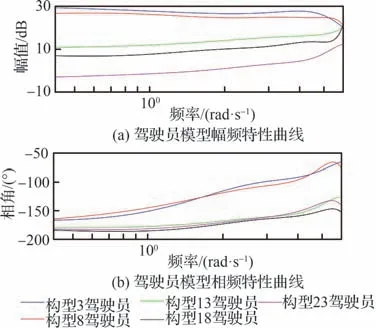
图15 相同ξsp 不同CAP 飞机构型对应驾驶员模型Fig. 15 Pilot model corresponding to aircraft configuration with the same ξsp and different CAP
3.3 结构驾驶员模型参数识别
基于3.2 节中驾驶员描述函数识别结果,选择合适的驾驶员模型结构,采用合理的优化算法,可以识别驾驶员数学模型,用于飞行品质评价。
本文选用的模型形式为简化的Hess 结构驾驶员模型(见图16),是一种单通道补偿控制回路。图中,c为指令输入;y为指令输出;e为误差信号;uc为直接对应误差信号的控制输出;um为本体反馈感受输出;u为驾驶员输出信号;Yc为飞机本体,s为拉普拉斯算子。表2 为简化的结构驾驶员模型固定参数取值。
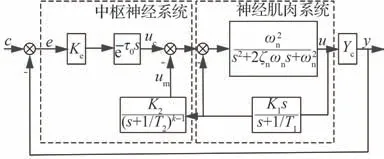
图16 简化的Hess 结构驾驶员模型Fig. 16 Pilot model for simplified Hess structure
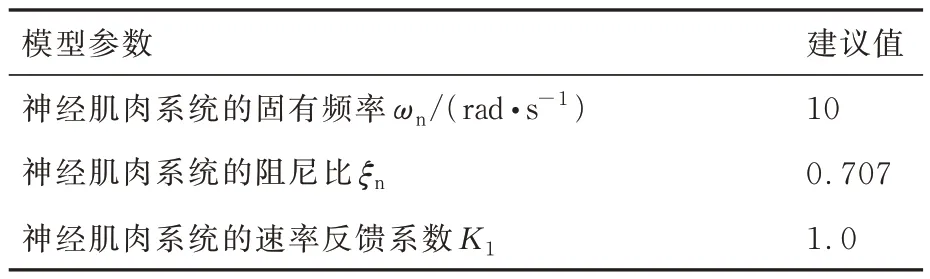
表2 简化的结构驾驶员模型固定参数取值Table 2 Fixed parameters of pilot model for simplified structure
简化的Hess 结构驾驶员模型参数分为2 类。一类是由人本身的生理条件限定的参数,包括表2给出的神经肌肉系统参数以及体现人对视觉输入响应延迟的参数τ0,考虑人类驾驶员的个体差异,τ0一般取0.1~0.3 s。另一类参数用来描述驾驶员对被控对象、飞行任务的自适应特性,其中k根据飞机构型的幅相曲线在穿越频率附近的斜率以及相位延迟来确定,详见表3。其中,Wc为幅频特性曲线;ωc为穿越频率。其他的参数包括驾驶员增益Ke、神经肌肉系统反馈时间常数T1、中枢神经系统的反馈时间常数T2和中枢神经系统反馈常数K2则需要通过参数辨识来确定。因为其适应于被控对象特性,随被控对象的变换而变化。
确定驾驶员模型的形式后,可以根据描述函数的试验点来拟配驾驶员模型的参数,一般采用偏差平方和最小的指标,见式(18),使得在频域内使驾驶员模型的幅频、相频与描述函数试验点接近,同时也采用了ρ2(ω)进行加权,考虑试验数据精确程度的影响。
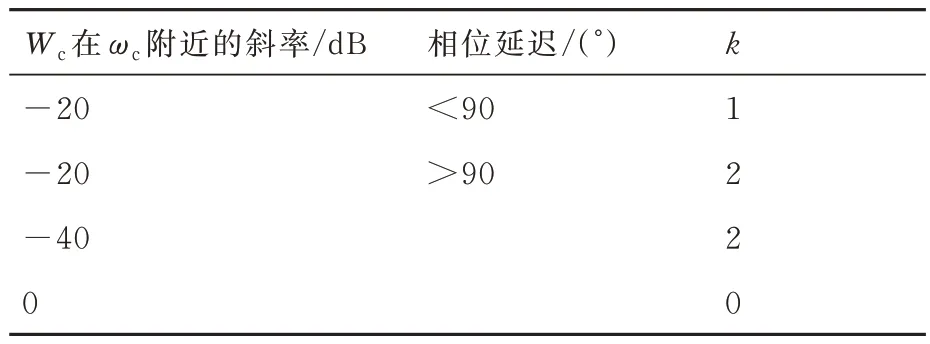
表3k 的确定方法Table 3 Determination method of k
式中:|YPm(ωi,αJ)|和∠YPm(ωi,αJ)分别为驾驶员模型的幅频和相频特性;|YPe(ωi)|和∠YPe(ωi)分别为描述函数试验点的幅频和相频特性;WJ为幅值和相角之间的权系数;自变量αJ为传递函数形式的驾驶员模型参数向量;ωi为频率。分别计算LJ个不同频率下的偏差平方和,并将其叠加,得到偏差平方和指标J。
3.4 驾驶员模型库结果
表4 为1~25 飞机构型所对应的Hess 结构驾驶员模型参数,这便是建立的驾驶员模型库,其中第i个构型对应的驾驶员模型用WPi表示。分析参与试验的驾驶员特性,选取驾驶员反应时间延迟为0.25 s。
表4 中的AR2表示驾驶员模型识别精度,与参数拟配准则式(18)相对应:
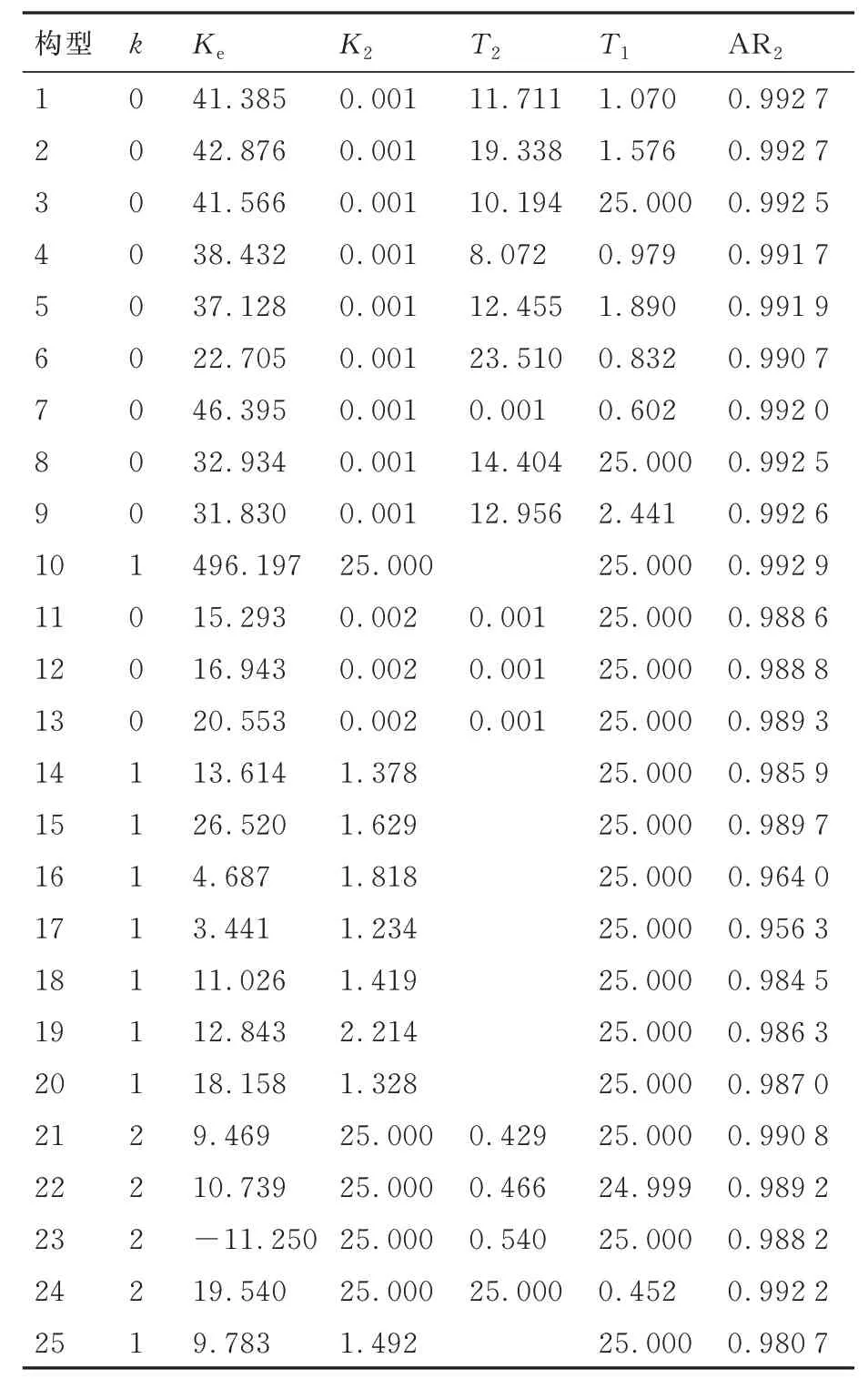
表4 与飞机构型对应的驾驶员模型库Table 4 Pilot model library corresponding to aircraft type
式中:|YPm(ωi,α)|和∠YPm(ωi,α)分别代表相似构型对应的驾驶员模型的幅频和相频特性;|YPe(ωi)|和∠YPe(ωi)分别代表描述函数试验点的幅频和相频特性。
由表4 可知,驾驶员模型识别精度均高于0.95,表明驾驶员模型能够描述实际驾驶员的操纵特性。
4 驾驶员模型使用中的匹配决策方法
本节具体介绍基于试验数据库预测驾驶员控制行为,匹配决策得到驾驶员模型的方法。
4.1 相似构型选取
文献[28]首先在试验数据库中选取与指定构型特性相近的2 个构型,然后通过插值的方法得到预测的驾驶员模型。在本文所建立的试验数据库中,相邻构型之间的差别不大且总的构型数量足够多,因此可以用相似构型的驾驶员模型直接来代替所预测构型的驾驶员模型。
参照文献[28],将式(26)作为确定构型相似程度的评价指标。
式 中:Ac,pred和φc,pred为预 测构型的幅相特性;Ac,i和φc,i为构型i的幅相特性;WV为相频特性的权值。调整权值会改变相似构型的选取,本试验中将权值定为0.12。研究人机耦合问题时,由于更关心驾驶员在中频段的操纵特性,因此频率ω的范围取为0.3~3.0 rad/s。指标Ji值越小,说明预测构型与构型i的特性越接近。计算试验数据库中每一个构型的Ji值,选择其中Ji值最小的构型作为预测构型的相似构型,与之对应的驾驶员模型作为预测构型的驾驶员模型。
4.2 模型匹配决策结果与验证
本文分析研究并用试验的方法得到对应驾驶员模型的飞机构型共有25 个,将这25 个构型作为构型库。另在一级和二级飞行品质范围内选取9 个点(图17),其中:|YPm(ωi,α)|和∠YPm(ωi,α)分别代表相似构型对应的驾驶员模型的幅频和相频特性;|YPe(ωi)|和∠YPe(ωi)分别代表描述函数试验点的幅频和相频特性。作为要预测的构型,这样便可以利用4.1 节提到的寻找相似构型方法并用相似构型的驾驶员模型来代替所预测构型的驾驶员模型。

图17 待预测构型Fig. 17 Aircraft configuration to be predicted
这9 个待预测构型a~i的参数见表5,匹配决策结果见表6。
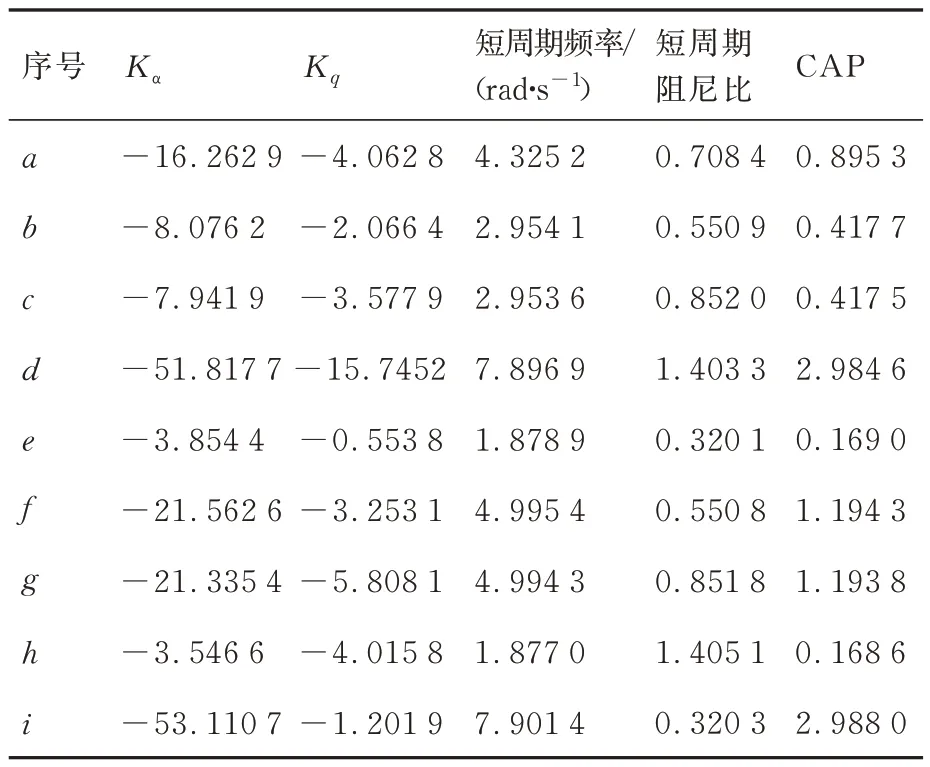
表5 待预测构型参数值Table 5 Values of configuration parameters to be predicted
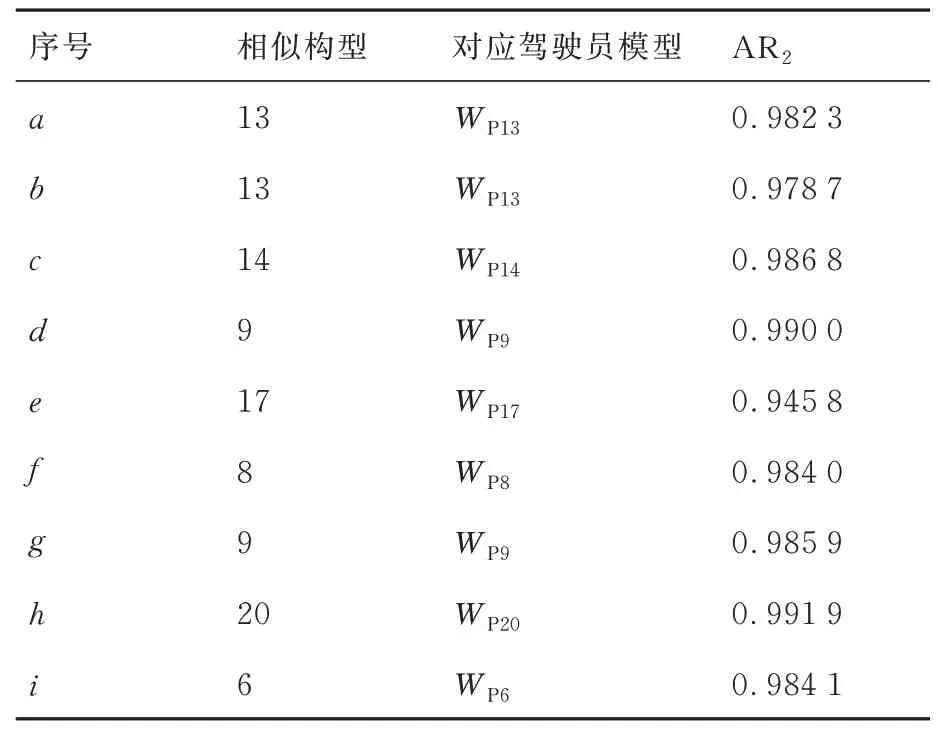
表6 匹配决策结果Table 6 Results of matching decision results
5 驾驶员模型在舰载机着舰研究中的算例分析
基于试验数据库建立的驾驶员模型可用于舰载机着舰过程仿真和驾驶员操纵负荷评估。图2 中对下滑道跟踪控制的驾驶员模型的详细结构如图18 所示,其中外环轨迹控制采用McRuer驾驶员模型形式,参数选择见表7;内环姿态控制驾驶员模型则是由上述试验数据库获得。图18中,θc为俯仰角指令信号;θ为俯仰角;γ为 下滑角。
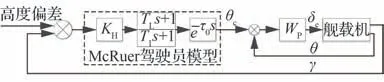
图18 下滑道跟踪控制驾驶员系统结构Fig. 18 Glidepath tracking control pilot model structure
表7 中的增益KH描述了驾驶员的幅值补偿作用;TL和Tl分别为驾驶员超前和滞后补偿时间常数;τd为驾驶员反应延迟。

表7 McRuer 驾驶员模型参数Table 7 Parameters of pilot model of McRuer
参考表6,以飞机构型c 和驾驶员模型WP14构成人机闭环系统,从舰载机截获下滑道窗口开始,设定初始高度偏差为1 m。当舰载机在舰船后方时持续受到舰尾流影响,采用四级海况下ESSEX 级航母的功率谱函数,并将其作用于整个下滑仿真过程中,仿真计算舰载机着舰过程,绘出其下滑道跟踪曲线及飞行状态曲线如图19所示。
分析图19 可知,虽然存在一定的延迟,但驾驶员基本能够跟踪内环俯仰角控制指令,最大舵偏角不超过2.5°。外环控制基本实现沿理想下滑道着舰。

图19 构型c 着舰仿真结果Fig. 19 Simulation results of landing of configuration c
1)基于同一理论评估驾驶员操纵负荷
为了对驾驶员操纵负荷进行评估,研究人机闭环飞行品质,采用同一理论对着舰过程进行了分析。在文献[23]中Hess 基于结构驾驶员模型定义了飞行品质敏感函数并将其作为驾驶员操纵负荷的评价指标,给出了评价的准则边界如图20 所示,其中:c 和h为2 种飞机构型。
针对飞机构型c 和飞机构型h,分别计算其飞行品质敏感函数,并将结果绘制在准则图上,整理相应指标参数见表8。um为驾驶员本体感受反馈信号,常用来作为衡量任务的难易度量;c为系统指令输入(见图16)。对比计算结果可知,构型c 都在一级飞行品质范围内,与基于CAP 准则的评价等级相同。构型h 大部分频率下都在一级飞行品质范围内,但在3~4 rad/s 的频率下,构型h 的QHQSF值超过了二级飞行品质边界,考虑到CAP 准则的评价中构型h 在二级飞行品质范围但靠近一级边界,因此其QHQSF值也是合理的。构型h 在3.8 rad/s 频率下达到三级飞行品质边界,说明此时驾驶员操纵负荷过重,品质评价结果差。总体来说,构型h 的QHQSF值比构型c 都要高,um的均方根值也更高,说明构型h 相比构型c,驾驶员操纵负荷更大。

表8 同一理论评估结果Table 8 Results of unified theory

图20QHQSF 等级图Fig. 20 Level of QHQSF
2)着舰满意度的统计学分析
舰载机着舰过程要求对3.5°下滑道实施精确跟踪,舰载机着舰后,实际着舰点和理想着舰点之间可能会有差别,之间的距离称为着舰偏差。图21 为着舰区域示意图,图中母舰甲板上通常有4 根拦阻索,相邻2 根拦阻索之间的距离为12.2 m,理想着舰点在第2 根与第3 根拦阻索之间。对于纵向着舰任务,理想的着舰偏差范围为-6.1~6.1 m,最大允许着舰范围为-12.2~12.2 m[31]。

图21 着舰区域示意图Fig. 21 Schematic diagram of landing area
分别对飞机构型c 和飞机构型h 进行着舰过程仿真验证,将初始高度偏差设置为1 m,采用表6 预测得到的驾驶员模型WP14和WP20,考虑甲板不同纵摇和垂荡状态,开展500 次蒙特卡洛仿真,得到的着舰评估结果如表9 所示,着舰点分布如图22 所示。

表9 着舰评估结果Table 9 Landing assessment results
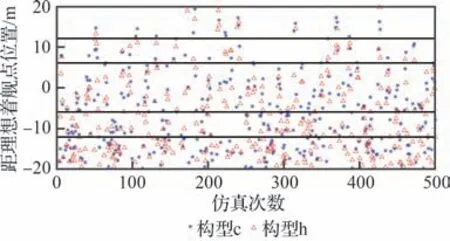
图22 着舰点分布图Fig. 22 Distribution of landing points
由表9 可知,本文计算的着舰成功率与文献[26]大体相同,说明了建模结果的合理性。构型c 比构型h 着舰成功率和理想着舰率都要高,着舰偏差平均值也较低,说明从结果上看,构型c 着舰效果优于构型h。再结合构型c 是一级飞行品质,而构型h 处于二级飞行品质中,说明这个结果是合理的。在过程中,构型c 和构型h 的高度偏差平均方根均小于1.5 m,且两者相差不大,说明在着舰过程中,构型c 和构型h 对理想下滑道都具有良好的跟踪效果。
6 结 论
本文针对复杂海况下的舰载机人工着舰任务,面向舰载机多构型配置,提出一种基于相似构型决策的结构驾驶员模型试验建模方法,并利用同一理论进行着舰操纵负荷评估,得到以下主要结论:
1)针对舰载机着舰过程中的俯仰姿态精确控制要求,提出基于CAP 准则、SAS 控制器设计手段构建飞机构型库的方法。通过驾驶员在环仿真试验,采用频谱分析方法识别结构驾驶员模型参数,建立驾驶员模型库。计算结果显示,驾驶员模型识别具有较高的精度,均在0.95 以上。
2)基于飞机构型库和驾驶员模型库,通过寻找相似飞机构型的方法,匹配决策指定飞机构型的驾驶员模型。研究结果显示,对于未知构型的驾驶员模型,匹配决策精度在0.94 以上,说明了模型预测具有一定的准确性。
3)基于预测的驾驶员模型构建舰载机着舰的人机闭环系统。对比处于一级和二级飞行品质范围的飞机构型,仿真结果表明,具有一级飞行品质的舰载机构型在着舰精度、着舰成功率等指标上均优于具有二级飞行品质的舰载机构型,说明了驾驶员模型的合理性。
4)应用同一理论,可以将预测得到的驾驶员模型用于着舰操纵负荷的评估。由于驾驶员模型是基于人在环仿真试验获得的,其评估结果更有针对性。分析算例飞机构型的评价结果可知,同一理论对飞行品质的预测与CAP 准则基本相同,但同一理论能够将不同频率范围内的驾驶员操纵负荷量化处理,完善飞行品质评估的指标体系。
