一种基于无迹卡尔曼滤波和炮弹运动轨迹模型的落/发点外推新算法
2023-03-24颜波涛李同亮
颜波涛,于 琼,李同亮
(1.中国电子科技集团公司第三十八研究所,安徽 合肥 230031;2.中国人民解放军陆军工程大学,江苏 南京 210001)
0 引 言
现代战场的炮兵作战,依然是一种强有力的作战方式。炮位侦校雷达一方面具备侦察功能,通过对敌军射出的飞行弹丸上升段进行搜索、跟踪、弹道外推来获取敌军火炮阵地的位置,为我方武器对其进行打击提供指导;另一方面,其具备校射功能,通过对我方射出弹丸的落点位置进行快速预测、比较偏差,从而校正火炮发射,很大程度上提高了我方火炮作战性能[1-2]。
从炮位侦校雷达的工作过程来看,决定其效果的主要有3个阶段:(1)目标搜索确认阶段;(2)目标跟踪测量阶段;(3)目标数据处理阶段,即弹丸落/发点外推。本文重点研究对测量数据的处理,即弹道外推算法。
现今,主要有2类弹道外推算法:一是基于先验样本的机器学习算法,其原理是利用弹道先验数据对弹道模型进行统计建模,再对当前弹道进行辨识。但是,炮位侦校雷达的实时性要求较高,且机器学习算法基于的大量准确的先验样本一般难以提供,因此,一般认为炮位侦校雷达的数据处理不宜采用机器学习算法;二是卡尔曼滤波估计算法,该类算法以弹道模型为基础,先利用卡尔曼滤波方法从包含噪声的量测数据中对系统参数进行辨识,再进行落/发点预测。其中较为常用的滤波算法有扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)等。应雷达实际需求的发展,各种非线性滤波方法逐渐成为炮位侦校雷达数据处理的研究重点[3-5]。
根据作者文献调研的结果,本文首先选择了较为先进的无迹卡尔曼滤波(UKF)作为弹道外推新算法的滤波方式,减轻了量测噪声的影响、辨识系统参数,再基于一种先进的炮弹运动轨迹模型,利用四阶龙格-库塔方程进行落/发点外推。期间,针对侦察模式加入了反向滤波和“七态”等策略,进一步提升算法效果。仿真测试结果显示,相比于其它2种国内雷达常用的经典弹道外推算法,该算法的定位精度大大提高。
1 算法及测试
1.1 算法介绍
前文已述,所提出的算法可以分成2个部分,利用无迹卡尔曼滤波方法(UKF)对雷达量测数据进行滤波,再利用滤波结果,基于一种先进的炮弹运动轨迹模型和四阶龙格-库塔方程进行外推,获得弹丸落/发点坐标。针对侦察模式,附加了反向滤波和“七态”等策略。下文将对各个部分做详细介绍。
1.1.1 滤波模型
1.1.1.1 炮弹运动弹道模型
(1) 校射所用弹道方程
校射时,雷达跟踪弹道降弧段。由于弹丸的参数均已知,因而所采用的弹道模型拟考虑利用弹丸自身的气动力系数,同时要涉及非标准条件(包括非标准弹道条件、非标准气象条件)。但是,顾及到计算时间,弹道方程又不能太复杂。对弹道降弧段,也没有必要采用6自由度刚体弹道方程,不过对偏流则应适当计及[6-8]。
以x表示射距离,y为高度,z为侧偏,非标准条件的弹丸运动方程为:
(1)
(2)
式中:vr是相对速度,其表达式为:
(3)
Cs是声速,其表达式为:
(4)
式中:G=6.328×10-3(K/m);τ0=273.15+t0,t0是地面气温(℃)。
ρ是空气密度,当y<10 km时,可取下列公式:
ρ=ρ0exp(-β′y)
(5)
(6)
地面密度ρ0与地面气压p0的关系由下式决定:
(7)
式中:M为空气1 kmol的质量,为28.964 4 kg/kmol;R为普适气体恒量,为8.314 32×103 J/(kmol·K)。
(8)

(2) 侦察所用弹道方程
由于雷达跟踪仰角不会小于2°~3°,因此即使敌方发射战术火箭,其弹道也将超过主动段而属弹道被动段。与校射弹道模型比较而言,其主要不同点在于:(a)侦察中的弹箭参数是未知量;(b)侦察弹道升弧段的前部分接近直线,偏流很小,可略去不计。由此仍以式(1)为基础,并做适当变更。首先令:
(9)
(10)
式中:C为弹道系数;Cxon(Ma)为标准弹的阻力系数,通常称之为阻力定律。
在弹道计算中,弹道系数对给定射角为常量,那么,N与N1所依赖的状态变量之间的函数关系是相同的。
其次,设置式(1)中的Kz=0。
最后,增设状态变量C,对弹道系数进行估计,得到侦察弹道的状态方程。
1.1.1.2 无迹卡尔曼滤波
无迹卡尔曼滤波(UKF)的产生和发展是基于不敏变换。其原理是,首先利用1组确定的样本点对状态向量分布进行反映,然后利用任意非线性函数进行转换后,这些样本点依然能够良好反映函数分布,通过整个过程对函数真实值精确估计,精度几乎可以达到2阶以上。UKF相对于一阶扩展卡尔曼滤波(EKF)具有更高的精度,而且避开雅可比矩阵的计算,不过相比EKF计算量仍有所增加[7-9]。
在外推算法的数据处理中,校射模式下,由于弹道系数已知,估计的状态向量维数为6,即六态,包括位置和速度;侦察模式下,增加了对弹道系数C的估计,即七态。
UKF的处理过程:
(1) 选取不敏变换采样点,以标准对称采样为例。在已知非线性函数的均值Xk-1|k-1和协方差Pk-1|k-1时,选择2L+1个采样点(L为状态向量的维度)进行下列计算:
χ0=Xk-1|k-1
(11)
(12)
(13)
(14)
(15)
(16)
(17)

(2) 计算状态预测
(18)
χk|k-1=f(Xk|k-1,k-1)
(19)
(3) 计算预测协方差矩阵
[χi,k|k-1-Xk|k-1]T+Qk-1
(20)
(4) 计算量测预测
(21)
ξk|k-1=h(χk|k-1,k)
(22)
在上述步骤完成后,即可完成滤波估计。UKF的过程通常是逐渐收敛的,也即是说,一般滤波末点的精确度最高,因此,弹道外推算法通常选择滤波终点作为外推起点。
1.1.2 弹道解算
炮位侦校雷达的弹道外推算法包括2个步骤:(1)对跟踪目标的量测数据进行非线性滤波,辨识弹道参数;(2)沿弹道起点方向进行解算,当解算至既定高度时结束计算,获取外推结果[9-10]。
目前较为广泛的解算方法是通过既定弹道模型建立弹道方程组,再采用数值计算方法解算弹道,最后推算落/发点。
解弹道微分方程组的方法很多,目前工程上应用较为广泛的是4阶龙格-库塔法[11]。
龙格-库塔解法是一种以函数y(x)的泰勒级数分解为基础的解算方法,形式如下,首先建立微分方程组并获取初值:
(23)
yi(t0)=yi0(i=1,2,…,m)
(24)
假设方程组在某时间点n处各变量的值为(t,y1n,y2n,…,ymn),则下一时间点n+1处,可通过4阶龙格-库塔算法计算各变量的值:
(25)
(26)
式中:h为迭代时间间隔。
采用此算法求解弹道落/发点的迭代过程如下:
步骤1:令n=0,t0=0,滤波末点状态向量作为yi,0的初值代入;
步骤2:利用tn和yi,n,计算过程值Ki1,Ki2,Ki3,Ki4;
步骤3:计算
yi,n+1=yi,n+(Ki1+2Ki2+2Ki3+Ki4)/6
(27)
步骤4:判断循环是否可结束,若否,令n=n+1,返回步骤2;若是,输出结果,结束。
1.1.3 侦察模式下的附加策略
1.1.3.1 “七态”向量
在所有的弹道外推算法中,一个影响弹道外推的重要参数就是弹道系数。校射模式下,弹道系数为已知,滤波算法通常构造六态状态向量,包括弹丸的位置坐标和速度,再以此建立状态方程,这可以认为是合理的。侦察模式下,敌方炮弹的弹道系数显然未知,于是出现了2种做法:一是算法认为弹道系数是常数,以相邻两点的速度、加速度滤波值代入弹道方程进行弹道系数粗略估计,实验证明误差较大;二是另一种弹道系数估计方法,即通过马赫数、阻力系数、弹丸速度等参数求取弹道系数,不过这种方法对先验知识要求极高,实际中难以使用[12-14]。
有文献提出,可将该参数纳入滤波过程,不断迭代,最终获取较为精确的参数估计结果。选取弹丸位置(x,y,z)及其在三维坐标轴上的速度分量(VX,VY,VZ)和弹道系数C形成7个参数的状态向量,简称“七态”:
X=(x1,x2,x3,x4,x5,x6,x7)=
(x,y,z,vx,vy,vz,C)
(28)
此时,弹道估计状态方程为:
(29)
1.1.3.2 反向滤波
反向滤波的原理在于减小外推距离。很多弹道外推算法,在侦察模式下进行滤波时,依然选择滤波时沿时间轴的正方向,即起始波束Ss至截止波束Se,外推时从滤波终点Se开始,按照估计的状态向量进行外推[15-17]。但这种方法可以通过反向外推减小外推距离,从而提高外推精度。
为了提高侦察模式下的发点外推精度,有文献提出,可以在滤波时选择相反的方向。即,将截止波束Se作为滤波起点,起始波束Ss作为滤波终点。该滤波算法对时间“方向”取反,将跟踪波束中的最后一点Ss作为外推时的起点,各坐标轴的速度分量为(-VX,-VY,-VZ),于是状态向量为X=[x,y,z,-Vx,-Vy,-Vz,C]。
实际证明,该方法的外推距离更短,误差更小,可以加以利用[18-19]。
1.2 其它2种对比算法
本文选择了其它2种较为常见的弹道外推算法作为对比,介绍如下。
算法1:国内某雷达实际使用算法。弹道运动模型与本文一致,但是选择的滤波方法为扩展卡尔曼滤波(EKF);侦察模式下利用了反向滤波的思想,但是对弹道系数的估计是基于对现有弹道量测点拟合的思想计算得到的。
算法2:国内某雷达实际使用算法。选择的滤波方法与本文一致,即UKF,但是利用的是不一样的弹道运动模型;侦察模式下也利用了反向滤波的思想,但是对弹道系数的处理是选取1个固定的经验值。
1.3 测试结果及分析
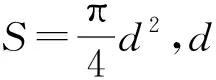
外推算法对比试验选取同一炮弹的雷达量测轨迹,选取同一起点,分别截取的量测轨道点数为50、100、150、200,每次外推次数为100。校射和侦察误差实验结果分别如图1和图2所示。
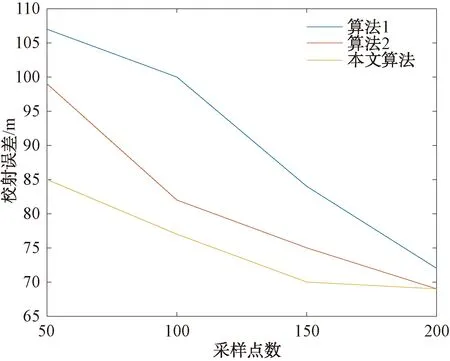
图1 3种算法校射误差
图2 3种算法侦察误差
显然,本文算法的外推误差要明显小于另外2种算法,且原始轨迹采样点数越多,即外推起始点越接近外推目标点,外推误差越小。
2 结束语
炮弹弹道落发点外推算法的好坏是决定炮位侦察校射雷达的关键因素之一。本文在对文献梳理和现有算法仿真研究的基础上,提出了一种基于无迹卡尔曼滤波和炮弹运动轨迹模型的落发点外推新算法。在所有算法中,该算法首次尝试将这两者结合起来,并加入了其它一些先进的外推策略,如“七态”和反向滤波。经过大量仿真和雷达实测数据的测试,结果显示,相比于国内其它2种常用的弹道外推算法,该算法的外推效果得到了大大提高。
