基于STM32单片机的智能消防机器人设计研究
2023-03-09张钦
张 钦
(淮安生物工程高等职业学校,江苏 淮安 223200)
消防机器人具有智能化、灵活性特点,尤其在火灾扑救中采用智能化消防机器人技术,可有效消除安全隐患。结合消防灭火需求,设计了基于STM32单片机的智能消防机器人。
1 基于STM32单片机的智能消防机器人设计
1.1 设计思路
基于STM32单片机的智能化消防机器人主要由人机互动界面、感知平台、运动平台、传感器检测设备、车体组成,如图1所示。
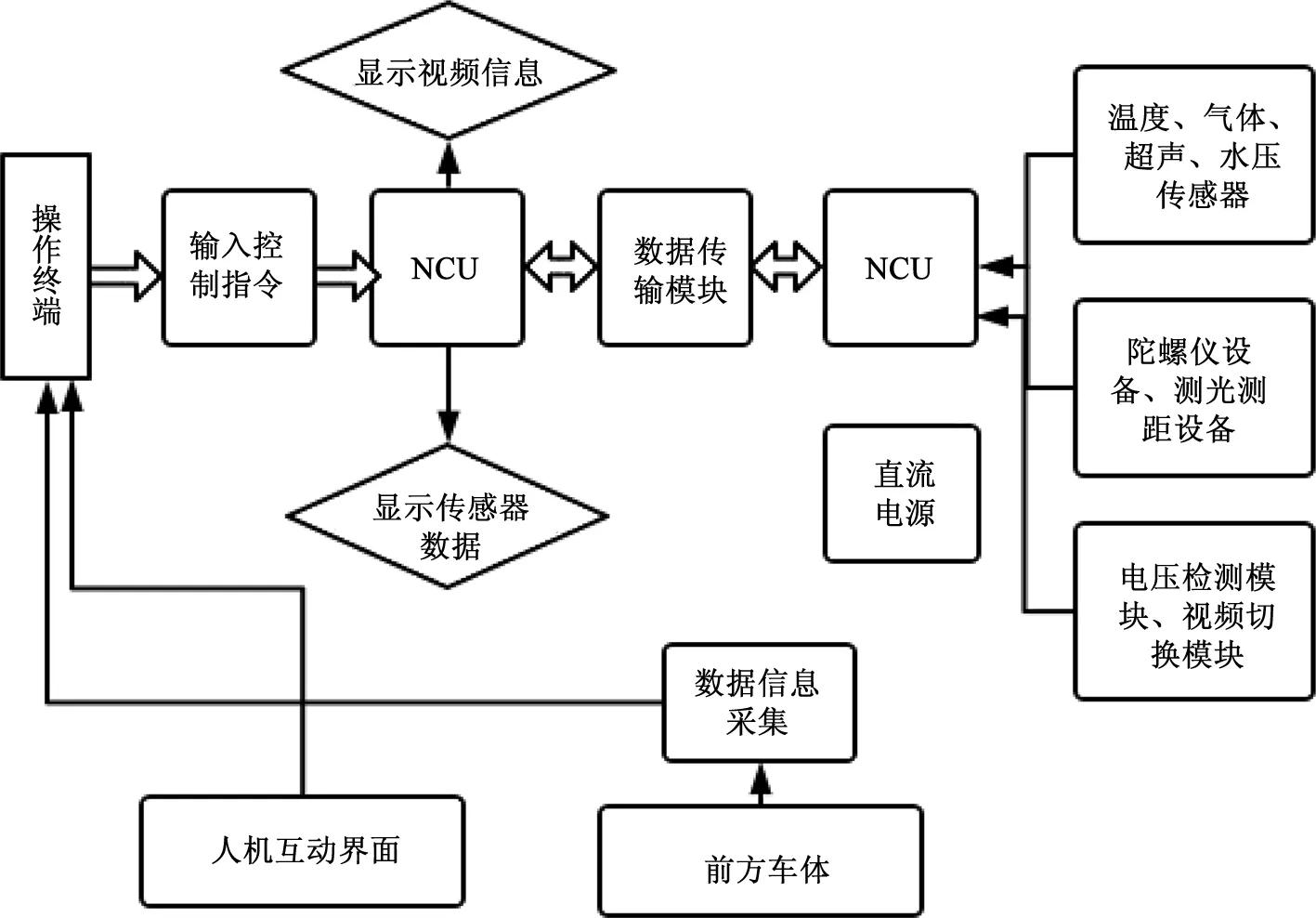
图1 智能消防机器人的设计Fig.1 Design of intelligent fire fighting robot
将主芯片进行多种任务处理,在机器人外部设置温度传感器、气体和水压传感器、超声波传感器、陀螺仪设备等,可准确采集火灾现场与周围的数据信息。同时设计了数字通信模块,以提高数据传输效果。车体内部配置了前后摄像头、高清摄像头、热成像摄像头,可有效进行各类视频的切换、传输处理,并利用高清高亮HDMI接口显示出来,通过高清图像模块进行无线图像传输,在后台使用遥控器进行摄像头控制,实时、清晰地将视频和图像显示出来。车体外部设计了自动化火灾喷淋系统进行车体的自主降温,避免火灾事故中车体零部件受到损害[1]。
1.2 软硬件设计
1.2.1 硬件设计
系统硬件由以STM32单片机为核心的下位机和上位机组成,其中STM32单片机芯片是核心控制板,可确保所有功能的实现。
上位机设计。设计目的是准确进行霍尔手柄、操作台中各个功能控制信号的读取,利用A/D转换模式对信号进行转换,使用数据传输模块将信息数据发送到下位机的主控制器内,获取操作手柄在坐标系中的实际位置。
下位机设计。为有效进行车体控制需进行运动逻辑分析,如果左侧与右侧电机正转速度相同,可控制车辆向前行驶;如果正转速度不同,可控制车辆向左或向右转动;如果左侧与右侧的电机转速相同但处于反转状态,可控制车辆向后行驶;左侧与右侧电机转速不同且处于反转状态,可使车辆左后倒车或右后倒车。
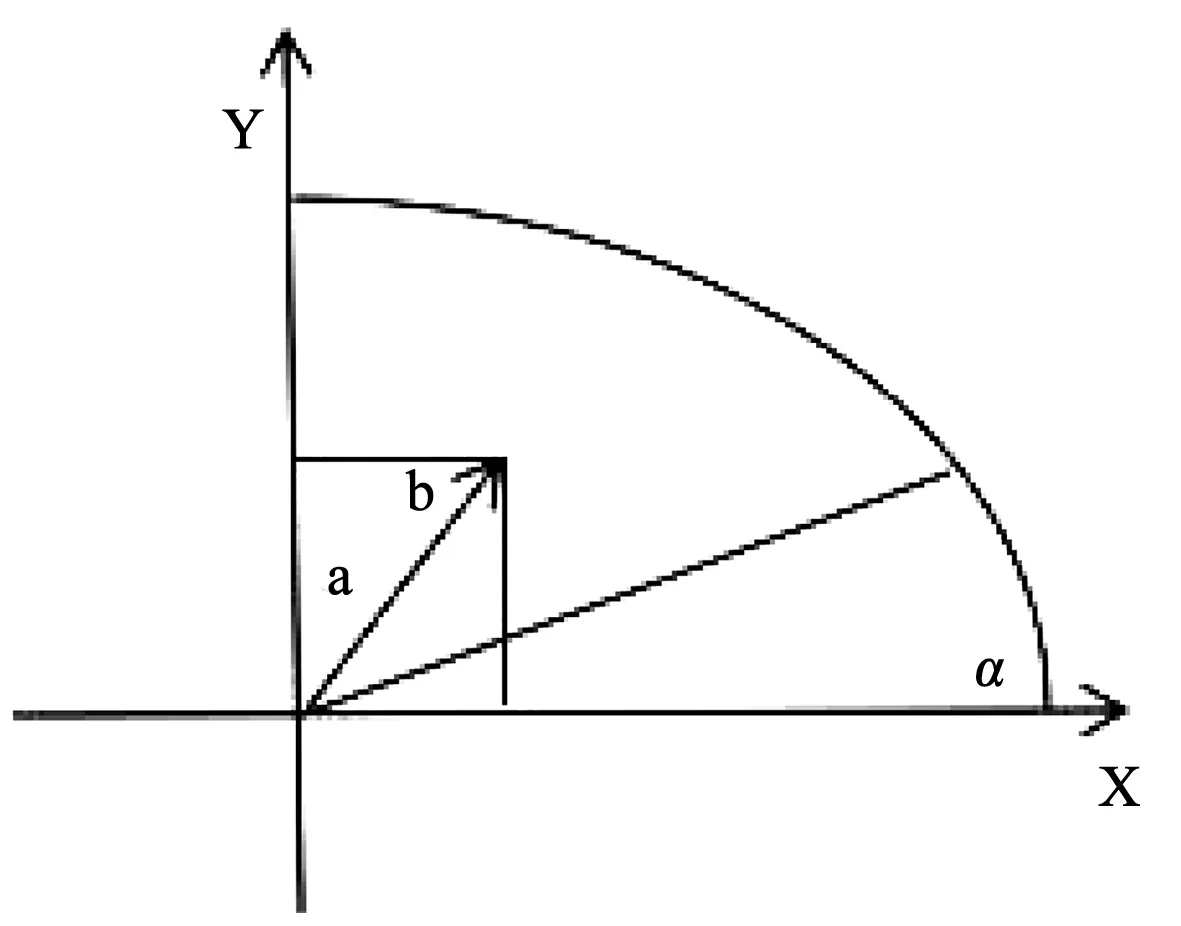
图2 霍尔手柄坐标Fig.2 Hall handle coordinates
如图2所示,将手柄设置为右侧上方第一象限,推动到最远的位置,使整个运动成为圆弧,设置半径a,将其作为电机电压最高的数据值,手柄移动位置b,将其作为实际电机电压的数据值,单片机读取数据值的过程中,读取到推杆顶端坐标(x,y)的数据信息,按照下列公式进行b、m和α数据值的计算分析[2]。
m=b/a
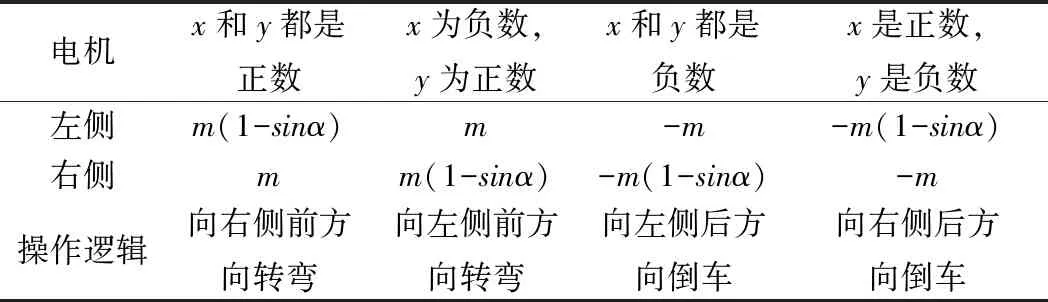
表1 电机控制逻辑和计算Tab.1 Motor control logic and calculation
除了进行上述各类动作控制外,还能通过对左侧与右侧电机的相同转速控制,进行相反转向调控,使车辆在原地旋转。
控制台操作面板还能进行水炮上仰控制、向下操作控制、左侧和右侧摆动控制、水流喷射措施切换等,同时进行观察云台、蜂鸣器、刹车、照明系统控制等。
1.2.2 软件设计
软件设计思路。系统软件设计要以KEIL环境为基础进行控制板编程,采用C语言进行控制程序编写,由于STM32单片机芯片具有单个周期DSP指令与FPU浮点单元,计算性能较高,因此可节约数据信息计算时间,还能为程序执行、数据信息传输等提供支持,加快数据处理和传输速率,满足系统设计标准要求[3]。
上位机控制软件设计。应完善软件的操作流程,如图3所示。需完成系统和通信模块的初始化操作,进入到主循环部分,如果由人工进行操作,可通过A/D转换模式对控制信号转换,进入单片机进行缓存处理,再输送到数据传输模块,发送到下位机设备中。在此期间,单片机能够从数据传输模块内进行传感数据信息的读取,而后发送给数字显示屏,将相关信息全面显示出来。
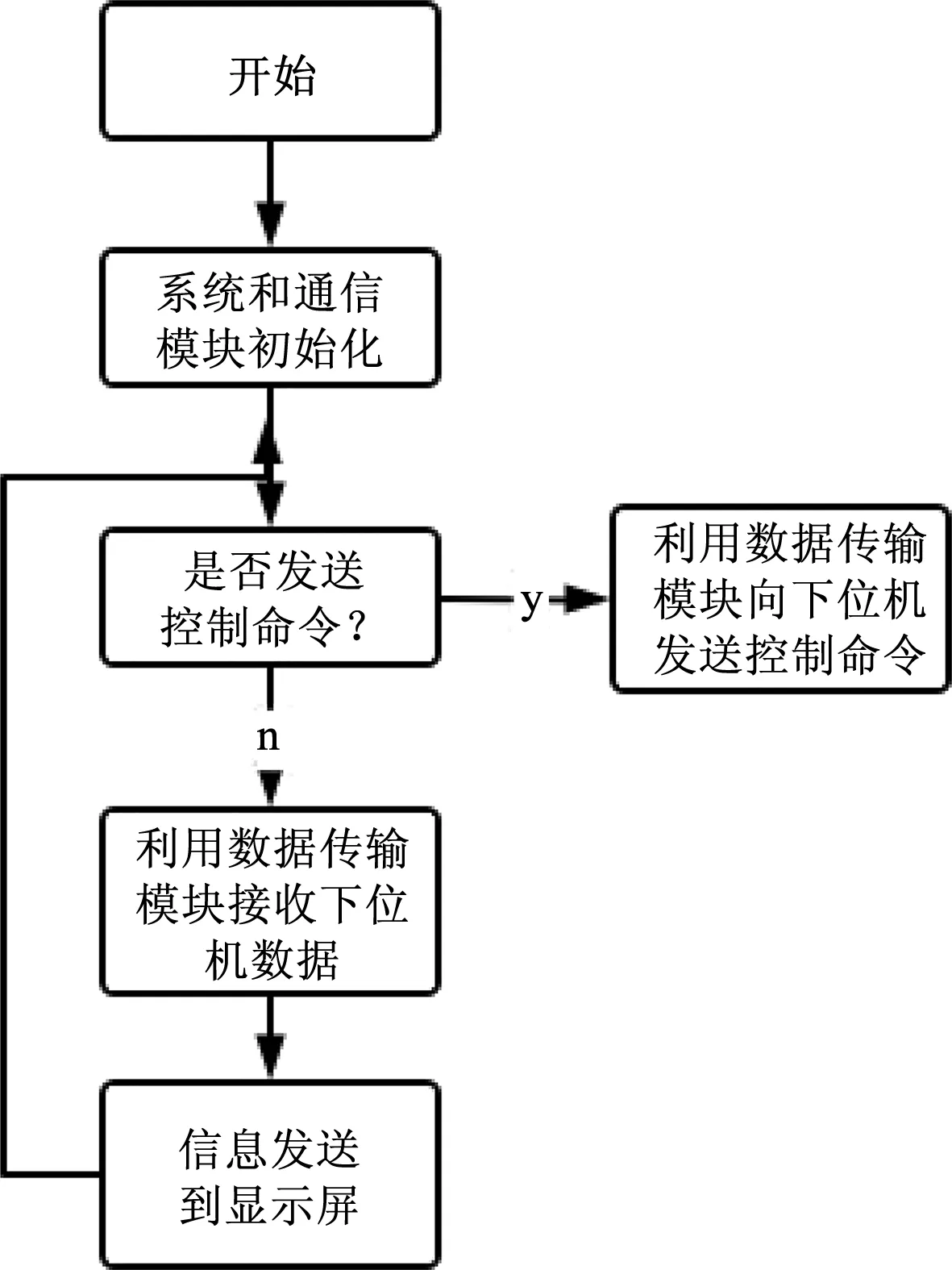
图3 上位机控制程序的流程Fig.3 Flow of the upper computer control program
下位机控制软件的设计。如图4所示,需先进行初始化处理,读取传感器数据信息,将数据存储到寄存器内,利用无线数据传输模块定期将寄存器的数据信息发送到上位机系统中。如果接收到上位机系统发送的控制信号,先进行左侧与右侧电机控制量的计算分析,转换成PWM控制信号,借助串口将信号传送[4]。
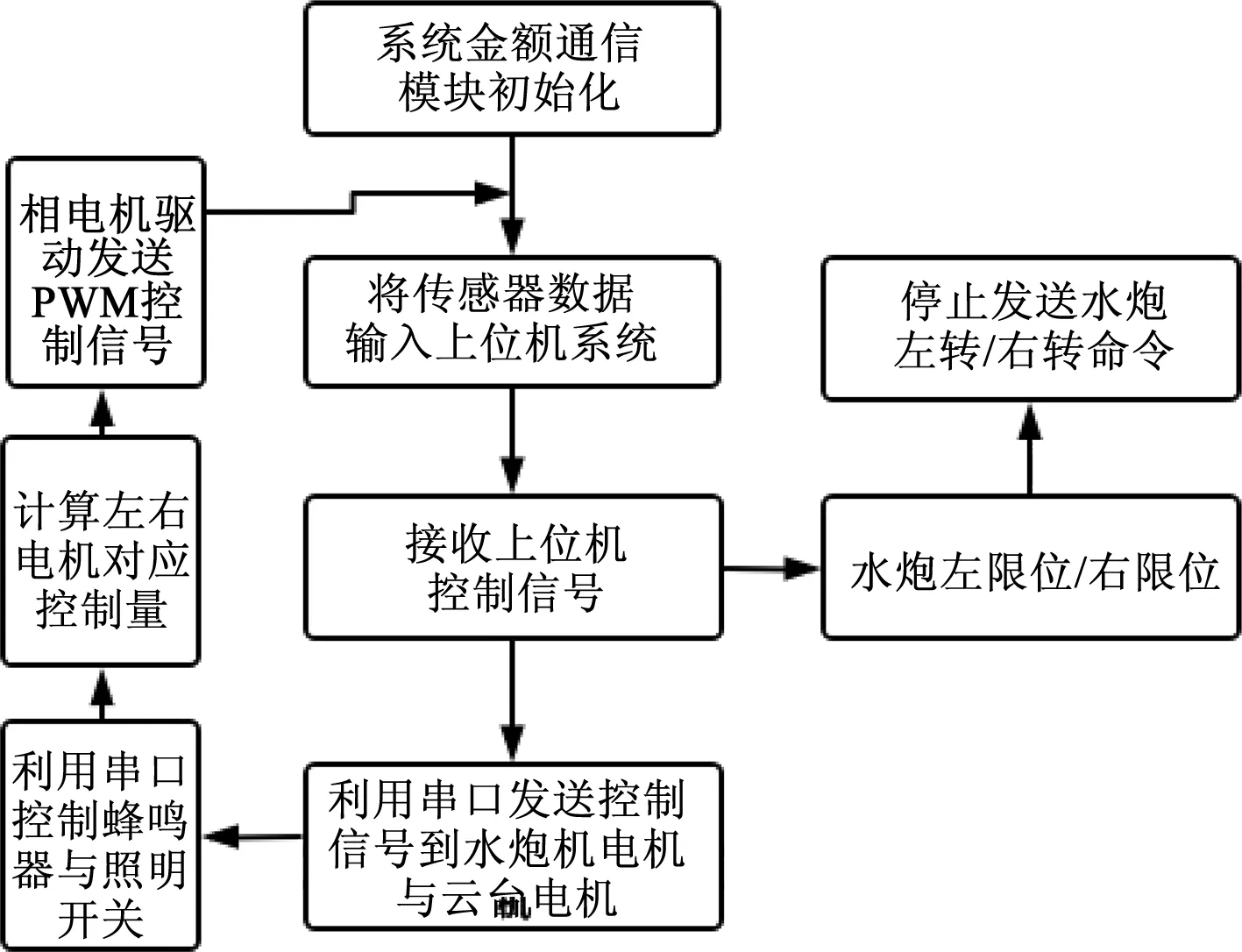
图4 下位机控制软件操作流程Fig.4 Flow of lower computer control software operation
图像处理白化算法软件设计。机器人图像处理技术具有多元化特点,本设计是将STM32单片机作为核心,主要使用白化算法技术方式有效解决机器人图像成像问题[5]。消防机器人在进行火灾扑救和抢险时可能会出现物体反射光亮、照明强度过高的问题,导致摄像拍摄受到不利影响,出现不确定性的风险,系统采集的图像和视频等清晰度难以符合标准。为有效防止此类不确定性因素带来的影响,应合理设计图像的白化算法软件,收集图像的像素数据值信息,将其转变成平均数据值与单位方差数据值。软件实际运行过程中,先进行原始灰度图像P像素数据值的分析,按照下列公式进行像素方差数据值δ2和平均数据值μ的计算。
完成计算后,将δ2与μ的数据值转化,根据公式计算分析:
将灰度图像转变成彩色图像,需分别设置3个不同的通道,对δ2与μ数据值精准计算,结合公式进行像素转化处理。同时在系统运行期间结合硬件平台特点,合理进行白化算法软件的应用,通过STM32单片机准确进行计算处理和滤波处理,利用图像存储器设备和系统进行画面截取,使用MATLAB完成图像效果的观察[6]。
1.3 整体机械结构设计
车体整体结构设计要在满足平地行驶要求的基础上能够在斜坡区、楼梯区域和积水区域安全驾驶运行,具备一定的特殊功能,如可在洼区正常行驶,同时能爬坡、跨越障碍,可在原地自由旋转。设计的履带类型机械结构如图5所示。
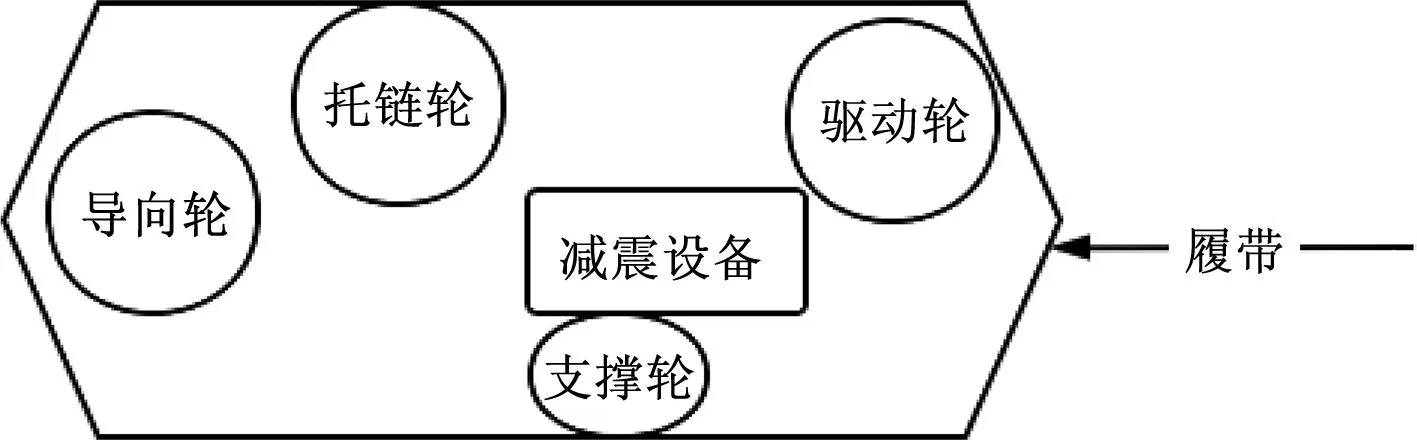
图5 履带类型行走机械结构Fig.5 Mechanical structure of track type walking
履带类型结构和地面接触面积很大,有很强的附着力和牵引能力,能够在积水道路和泥泞道路行走,通过性很高。整体车体的架构设计采用铝合金铸造材料,轮系部分由驱动轮、拖链轮等组成。将精密行星减速无刷电机设备配置在驱动轮上,提升驱动力水平。导向轮按照地面摩擦系数的差异,对履带松紧度进行调整,使履带适应不同的环境。配置支撑轮用来支撑车体重量、水带重量和水炮重量,减震器设备的应用则能防止车体颠簸,增强车体的稳定性和平稳性,支撑轮能够跟随履带发生转动,降低两部分的摩擦。除此之外,结合车体的结构特点,设计了专用的消防水炮设施,在车体底部区域的中间位置配置水管,车体后下方位置将水管接入,利用前端水炮进行灭火剂的喷射,实际运行中整体结构重心很低,喷水过程中车体非常稳定[7]。
2 智能消防机器人的试验与应用
2.1 试验
A.速度试验。将机器人设置在道路中行驶,进行运行速度测试,发现机器人运行速度为3 km/h左右,最高爬坡角度36°时,行走速度可达0.9 km/h,直线行走200 m的范围内,虽然会出现方向误差偏移,但能够满足具体的实践应用标准要求[8]。B.图像仿真试验。仿真真实的火灾现场图像,发现屏幕中显示的图像没有明显的波纹和雪花,可满足应用标准规范。C.水炮试验。按照要求在机器人上设置水带,将水的压力调整为0.8 mpa,发现水炮的喷水长度为72 m左右,自动化喷淋系统能够快速开启,有效降温。
2.2 应用
下位机整体架构由控制板、图片视频传输模块、传感器、电机驱动和电源电压检测模块组成,主要功能是进行上位机操作数据信息和信号的读取,准确计算控制量数据,将PWM信号输送到电机驱动器系统,对水炮设备和云台设备的工作进行控制。与此同时,进行不同传感器数据信息的读取,传输到上位机系统,按照传感器所检测的水炮水压数据、车辆前后障碍距离数据、车体倾斜角度数据、车体温度数据等,合理进行各类数据的传输,同时下位机中的电压模块对电池电量进行动态化检测,不同数据经过串口传输到下位机控制板内,利用数据模块将数据发送到上位机,使各类数据都能在显示屏中显示出来。另外,车辆具备一定的紧急刹车性能,为防止云台或水炮等设备操作过程中对机械系统造成损伤,应合理设置云台机械限位,设置水炮的左侧和右侧限位,严格进行自动摆动功能设定,确保水炮开启过程中摆动幅度能够控制在一定的范围内[9]。
3 结束语
基于STM32单片机的智能消防机器人设计,需完善和优化整体架构设计模式和体系,确保软件系统、硬件设备和整体车体机械结构设计的科学性与合理性,还需进行试验测试,分析测试结果,确保后续的良好应用。
