基于自学习稀疏先验的三维SAR成像方法
2023-03-06韦顺军周梓晨张晓玲
王 谋 韦顺军 沈 蓉 周梓晨 师 君 张晓玲
(电子科技大学信息与通信工程学院 成都 611731)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)成像技术作为一种有效的主动遥感手段,在国民经济建设和军事侦察领域发挥了不可替代的作用[1-3]。其中,三维SAR成像技术通过孔径维度拓展,克服了传统二维成像中存在的诸多局限,在城市三维空间建模、智能辅助驾驶、陡变复杂地形测绘、快速无损检测等领域展现了显著优势及重要的发展潜能。然而,三维SAR成像处理技术的实际应用仍然需要突破以下3个关键科学问题:(1)相比于传统二维SAR回波数据体量,三维SAR回波数据量大幅增加,如何在计算处理平台的有限内存空间部署相应的成像处理算法是推动三维SAR成像技术向成熟应用阶段演进的关键;(2)Nyquist定理约束下,如何解决三维SAR回波采样点数和系统复杂度的矛盾问题,同样影响着未来三维SAR成像处理算法的发展;(3)受限于分辨率模糊理论,传统三维SAR成像算法普遍存在着旁瓣、栅瓣和背景杂波的干扰,极大地影响了三维SAR图像的后续解译识别及其他应用。因此,如何有效抑制干扰,提升成像质量成为三维SAR技术的又一关键问题。针对上述关键问题,本文旨在从算法角度研究如何降低三维回波数据体量并保证成像精度,同时提升成像处理效率。
压缩感知(Compressed Sensing,CS)理论[4]的诞生,给信号处理技术带来了革命性的突破。近年来,CS理论在图像压缩[5]、信道编码[6]、雷达信号[7]处理等不同领域取得了诸多成果并持续处于研究热潮。CS理论指出,当信号稀疏或可压缩时(即在某变换域稀疏),可以采用远低于Nyquist采样率的测量样点重构原始信号。从CS理论的角度,SAR成像问题可以等效为一个典型的复数逆问题。利用场景稀疏、可压缩或其他结构性先验特征,目标散射系数可以从欠采样的回波中精确解算。通常的解决方案是构建线性测量模型,并通过嵌入基于稀疏先验信息的正则项以约束解空间,从而寻求满足稀疏特征的最优解。根据正则化建模方法,当前SAR成像算法可以划分为如下3种类型:第1类是贪婪算法,其中具有代表性的如:正交匹配追踪算法(Orthogonal Matching Pursuit,OMP)及其衍生方法,该类算法采用直观的“L0”正则化,直接对解空间非零元个数进行约束,串行地估计场景中独立的强散射点。其中OMP算法在SAR稀疏成像中的有效性已被广泛验证。例如,文献[8]采用OMP算法估计稀疏重建中的偏离网格扰动,进而精确地重构SAR图像。文献[9]提出了一种基于联合低秩稀疏的SAR成像方法,其中OMP算法被用于估计其中的稀疏分量。尽管OMP算法在SAR成像问题中表现稳定,却依然受制于两个关键特性。(1)OMP算法需要提前估计场景的稀疏度,且稀疏度估计的精确与否直接影响了算法的重构精度,这在现实应用中是难以实现的;(2)OMP所需的迭代次数随着场景稀疏度的增加而增加,导致其在大场景SAR成像问题中效率低下。第2类为凸优化松弛算法,例如:近似消息传递算法(Approximate Message Passing,AMP)[10],交替方向乘子法(Alternating Direction Method of Multipliers,ADMM)[11],迭代阈值收缩算法(Iterative Shrinkage-Thresholding Algorithm,ISTA)及其加速改进方法(Fast ISTA,FISTA)[12]。此类算法将“L0”正则化松弛为“L1”,将原优化问题变得平滑可导,保证了获得可理论论证的收敛解。第3类为基于统计建模的稀疏重建方法,其中具有代表性的为稀疏贝叶斯学习(Sparse Bayesian Learning,SBL)算法。该算法基于贝叶斯推断框架给出了求解稀疏信号的有效迭代方法。文献[13]全面概述了SAR成像领域中的贝叶斯学习方法。然而,贝叶斯学习方法普遍受限于复杂的推断过程及冗长的处理时间,限制了其实际应用。
以上3类SAR稀疏成像算法的共同点在于其低效的迭代处理特性,这些算法普遍存在计算复杂度高,超参数调试困难、对弱稀疏成像场景适应性差等问题,制约了其实际应用。为了提升稀疏成像算法的效率,文献[14]提出了一种从RD算法中衍生的近似观测模型,从而可以以二维形式进行稀疏成像处理,相比于传统稀疏成像算法提升了成像效率。文献[15]提出了一种基于Chirp Scaling解耦合算子的Lq正则化SAR成像算法,并且通过实验论证所提算法的效率较传统矩阵向量测量模型有了显著提升。从文献[16]中衍生的算法展开思想(Algorithm unfolding)填补了迭代算法和深度神经网络之间的鸿沟,弥补了传统基于“黑盒”深度网络可解译性问题的空缺,为解决稀疏重构算法的低效性问题带来了转机。在该思想的指导下,算法展开框架已被广泛拓展至诸如通信干扰抑制、图像超分辨、医学成像等领域中,推动了其迭代算法的智能化演进。在SAR成像领域中,近三年以来算法展开框架也逐渐引起关注。例如,文献[17]提出了一种基于自编码架构的SAE-Net,解决了SAR成像和自聚焦问题,其中SAE-Net的编码结构为基于ADMM算法的展开网络。文献[18]通过结合FISTA算法的展开,提出了用于三维SAR成像的CSR-Net。文献[19]提出了MDLI-Net用于稀疏采样情况下的大转角高精度雷达成像。文献[20]建立了一个混合散射回波模型,并据此提出了参数化SAR超分辨成像算法,其中包含了3个罚函数项用于约束点、线、面散射特征,且进一步将所提算法展开为深度网络,提升了成像质量。此外,许多新颖的SAR成像网络在近几年相继出现[21-25],拉开了SAR成像处理智能化演进的序幕。然而,目前传统稀疏成像算法甚至部分网络模型是基于矩阵向量模型,该模型将散射系数和回波矩阵向量化,并且在大场景成像问题中不可避免地引入了超大规模测量矩阵,限制了该模型在大规模SAR成像问题中的应用。针对上述问题,文献[26]将近场RMA成像算法及其逆过程设计为成像算子,该算子能够直接基于二维回波进行计算,避免了大规模矩阵储存及处理,提升了成像效率。此外,采用模型与数据驱动结合的思想,将ISTA算法展开为深度迭代网络(RMIST-Net)进一步提升了成像精度和效率。然而文献[26]表明,由于其固有稀疏性假设,在欠采样情况下,RMIST-Net对于非孤立散射点场景(即存在面目标的弱稀疏场景)的重构结果中,普遍存在散射点丢失,幅值衰减等问题,严重地影响了目标的辨识能力。
针对上述问题,本文在基于安检场景中的近场三维SAR稀疏成像问题的背景下,提出了一种基于自学习稀疏先验的三维SAR成像方法,旨在利用卷积神经网络的万能近似特性,挖掘SAR成像场景的广义稀疏表征,从而突破传统稀疏成像算法在弱稀疏场景下的性能极限。此外,受益于深度网络的高并行化特征,将所提稀疏成像算法设计为深度展开网络,进一步提升稀疏成像算法的效率。其创新点概括为:(1)构建三维SAR成像问题的核函数表征模型,并据此导出稀疏重构算法,提升了成像处理效率;(2)将迭代稀疏重构算法映射为深度展开网络,并通过反向传播算法自动更新算法参数,避免了人工调试参数带来的精度损失;(3)设计了双通道镜像对称的卷积模块以学习中间信号的最优稀疏表示,提升了算法在弱稀疏场景下的重构性能。最后,通过仿真和实测三维SAR成像实验,探究所提方法在精度和速度方面的性能,验证了所提方法的有效性。
2 三维SAR信号模型及稀疏成像
2.1 三维SAR信号模型
三维SAR成像技术旨在从接收的雷达回波中直接恢复目标的三维空间散射特征。其本质在于形成二维天线孔径,从而获得空间上的二维角分辨;而第三维分辨率源于解析回波信号的波达时间,从而获取目标的距离信息。图1给出了典型的三维SAR成像几何模型。其中,Y轴方向定义为距离向,天线相位中心在X-Z平面均匀分布;Pa=(x,0,z)表示阵元相位中心的空间位置坐标;Ps=(x′,y′,z′)表示散射单元σ的空间位置坐标。因此,回波信号模型可以写为
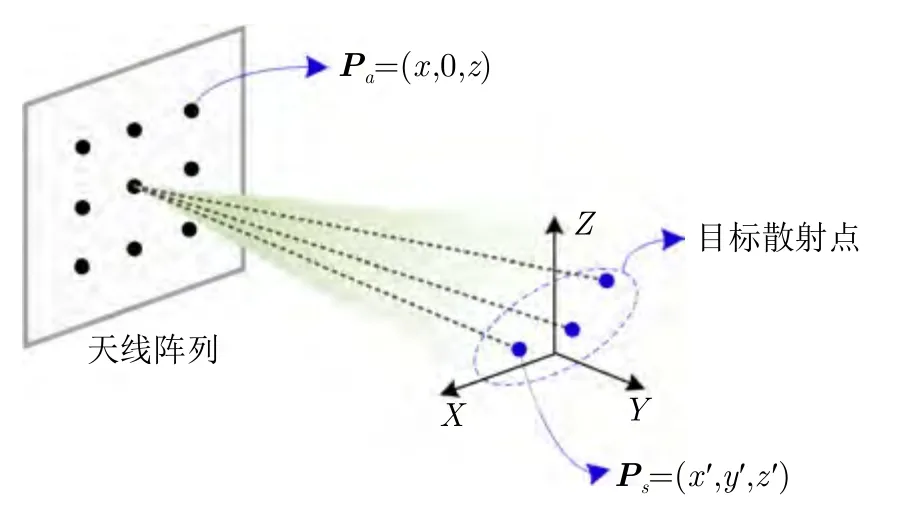
图1 三维SAR成像几何模型Fig.1 3D SAR imaging geometry
其中,Ω为成像空间,Eraw∈CNa×Nr为二维原始回波矩阵,Na,Nr分别表示阵元数量和快时间采样点数;R=‖Pa-Ps‖2为距离历史,τ定义了快时间,k=2πf/c,其中f,c分别表示载频和光速。式(1)中φ(τ,R)项携带了目标的距离向信息,可表示为
其中,K为发射信号的调频斜率。通过脉冲压缩,该项表现为sinc函数形式的距离模糊函数,其距离分辨率由信号带宽决定。此处,考虑距离向聚焦后的等距离切片信号,可表示为
其中,r为距离单元索引,X(Pa,r)=σ(Pa)χ(r)表示距离聚焦后散射系数矩阵中Ps对应的元素,χ(r)表 示距离模糊函数,Ωr为第r个等距离切片对应的成像子空间。不失一般性,省略距离单元索引,展开坐标向量,可得
根据驻定相位定理,式(4)中指数项可以分解为
kx,ky,kz分别表示X,Y,Z轴方向的空间波数分量。将式(5)代入式(4)并整理积分顺序,可以得出
其中,算子 FT2D和I FT2D分别表示二维傅里叶正变换和逆变换。因此,可以根据式(7)导出距离徙动成像算法(Range Migration Algorithm,RMA)为
其中,P为以为元素构建的二维相位传播矩阵。得益于快速傅里叶变换算法(Fast Fourier Transformation,FFT),RMA算法计算效率高,因此被广泛应用于各种毫米波近场SAR三维成像场景中。然而,RMA算法成像精度的保证源于对均匀采样苛刻需求,提升了成像系统的实现难度。而CS理论被广泛应用于欠采样精确恢复信号的场景,为降低系统复杂度提供了理论支撑。下文将简要介绍基于CS理论的稀疏成像技术。
2.2 ISTA迭代稀疏成像
通常,广泛采用的稀疏重建模型是直接将式(4)转化为如下矩阵向量乘积形式的线性问题
其中,vec(·)为 向量化算子,B∈CNa×Ns为测量矩阵,其元素由式(4)中指数项组成,Ns表示离散化场景网格数,n定义了噪声扰动。模型(9)的优点在于精确建模了场景散射系数和回波之间的映射关系。然而,由于其计算过程中需要将场景散射系数及回波向量化,并构建对应的测量变换矩阵,导致大维度成像问题的计算负荷难以承担。此外,向量化运算也丢失了场景二维耦合先验信息。为了弥补这些缺陷,文献[14]提出了一种从RD算法衍生的近似观测模型,该模型将其距离压缩、徙动校正、方位压缩等过程中涉及的相位补偿、傅里叶变换等运算表示为成像表征算子。这样的成像算子相当于将距离方位维的聚焦及其逆过程建模为二维形式的测量模型。在近场三维SAR成像问题中,方位向为二维孔径,直接应用上述算子依然无法有效避免大规模矩阵运算。基于式(7)和式(8),分别构建了矩阵形式的近似成像观测算子和逆算子。
根据稀疏信号重建理论,SAR成像问题可以建模为“L1”正则化问题
其中,λ为正则化系数,‖·‖F为 矩阵F范数,‖·‖1为向量1范数。
迭代阈值收缩算法(Iterative Shrinkage-Thresholding Algorithm,ISTA)作为求解“L1”正则化问题的经典方法,其算法的基本思想是将问题(11)分别为平滑可微和不可微的两个子优化问题交替求解,迭代循环逐层更新,从而获得最优估计值。在式(11)的模型下,ISTA的迭代步骤为
其中,t为迭代索引变量,,τ为迭代步长,soft(·,·)为“L1”正则项对应的近端映射算子,在复值传播情况下,其解析表达式为
算法1给出了基于核函数的ISTA稀疏成像算法流程。然而ISTA迭代算法参数调试耗时长,以及采样率变化时需要重新精调参数,其稳定性较差。针对该问题,本文将式(12)作为理论支撑,将成像网络设计为层级固定的迭代结构,其算法参数由网络权重控制,在训练过程中自动优化,以提升算法的效率和稳定性。此外,设计了双通道镜像卷积神经网络结构用以学习粗重构信号的最优稀疏表示,以提升所提算法在弱稀疏场景下的重构性能。
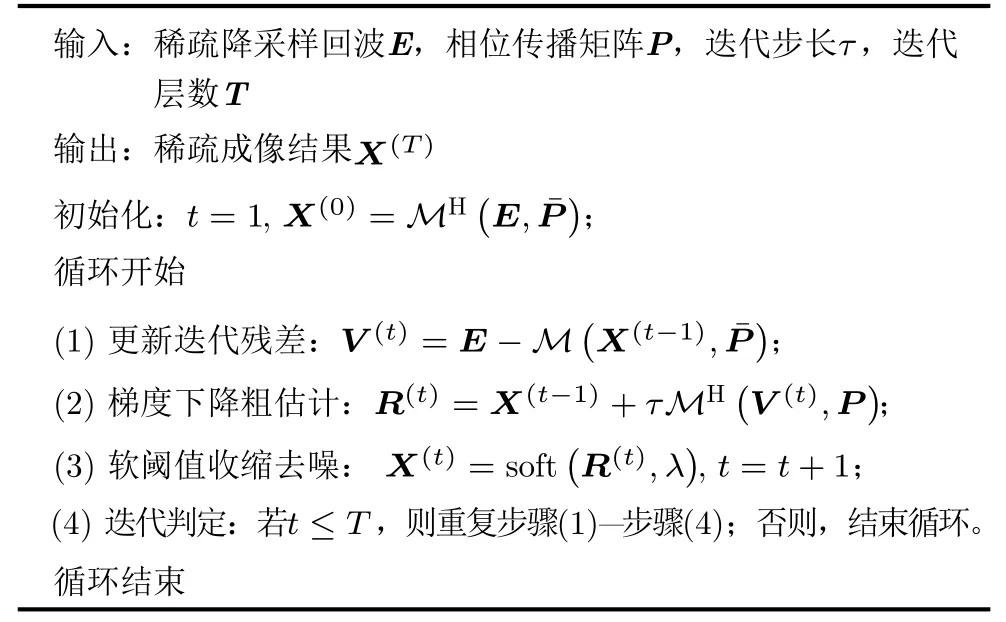
算法1 基于核函数的ISTA稀疏成像算法Alg.1 ISTA sparse imaging algorithm based on kernel functions
3 基于自学习稀疏的3D SAR成像网络
3.1 迭代算法框架的网络拓扑表征
为了进一步提升网络的拟合能力进而增加稳定性,在式(12)的基础上将算法参数松弛为层级可变,即其中迭代步长和正则化参数随着迭代索引的增加而变化,分别为τ(t)和λ(t)。通常情况下,基于算法展开的方法直接将τ(t)和λ(t)等迭代参数设为可学习,忽略了它们的数值优化规律约束。考虑在算法迭代过程中,随着迭代索引的增加,理论上估计值精度逐渐提高。因此在梯度下降估计R(t)时,其合理的优化步长τ(t)应 逐渐降低。同样,soft(·,·)本质上等效于去噪算子,随着迭代的加深,噪声逐渐被抑制,强度减弱,因此λ(t)也应随着迭代索引的增加而降低。基于上述考虑,此处引入softplus正则化函数以约束算法参数合理更新,定义权重控制变量w1<0,w2<0,偏置变量b1,b2,则τ(t)和λ(t)更新规则定义为
所提成像网络为层级级联结构,网络每一个迭代层由ISTA的3步迭代映射形成,命名为LSISTA(Learned sparsity-driven ISTA)。LSISTA各迭代层包含3个级联的数据处理节点V(t),R(t)和X(t),分别对应ISTA中的计算步骤。LSISTA的总体框架如图2所示。其中,V(t),R(t)对应模型(11)中平滑F范数的单步梯度下降,在所提LSISTA中其计算步骤保持不变,而将步长替换为w1和b1控 制的τ(t)。在单步梯度下降得出粗估计结果R(t)之后,X的估计实质是一个经典的LASSO问题。不同于直接利用原始场景中的先验特征,本文旨在设计一个广义稀疏表征算子T(·),以进一步挖掘成像场景的可压缩特性。则从R(t)中 估计X(t)的LASSO问题可以进一步表示为
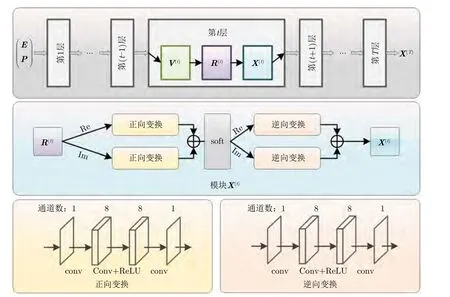
图2 所提LSISTA网络结构示意图Fig.2 The structure of the proposed LSISTA
根据文献[27],若定义
其中,ReLU(a)=max(a,0)表示修正线性单元。则式(15)可以写为
根据式(18)可得出X(t)的解析解为
其中,soft算子中max运算可等效为ReLU单元。根据式(19),在LSISTA网络中将设计X(t)模块设置为镜像结构的近端映射算子。考虑目前主流深度学习框架对复数优化问题的弱兼容性,将复值数据流拆分为实虚部双通道,分别送入用以学习最优稀疏表示的CNN模块。其中,实虚部数据流稀疏表征模块共享权值,以降低网络的内存开销。对于CNN稀疏表示模块,其拓扑结构源于式(16),将基于权重矩阵的线性乘法运算拓展为通道可变的线性卷积,从而提取更加丰富的特征表示。算法2总结了LSISTA网络稀疏成像算法处理流程。
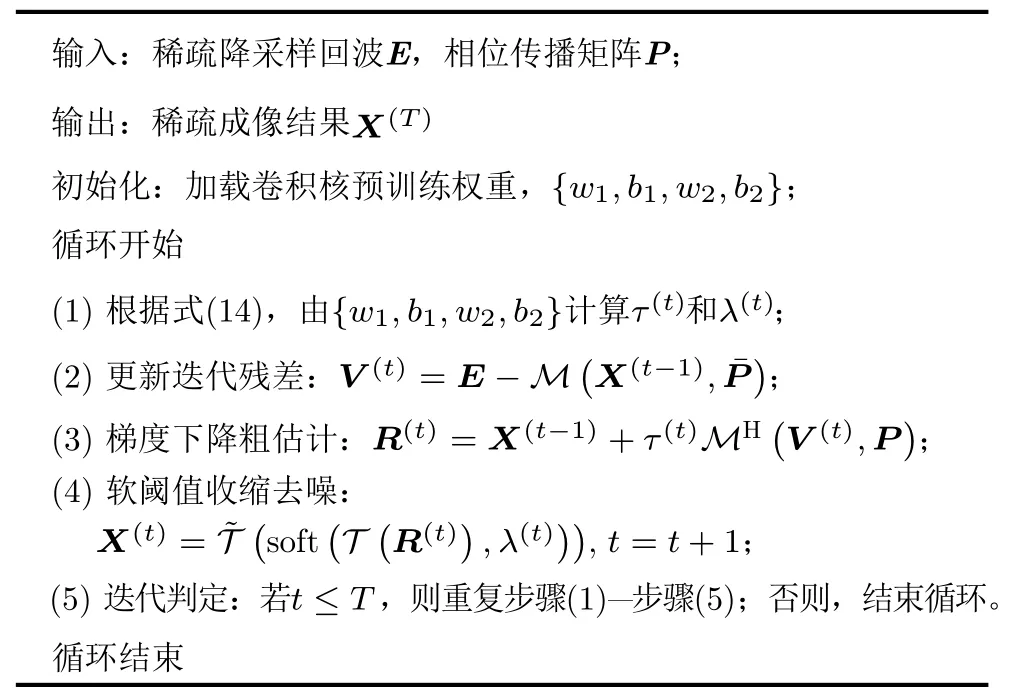
算法2 LSISTA网络稀疏成像算法Alg.2 LSISTA network-based sparse imaging algorithm
3.2 网络训练策略
LSISTA网络的损失函数由两部分构成。首先,考虑了在像素级重构问题中广泛采用的归一化均方误差损失(Normalized Mean Square Error,NMSE)。若训练样本为 (E,X),则NMSE误差可定义为
其中,Net(·)表 示LSISTA网络模型,E定义了期望运算符。进一步,考虑T(·)算子的正交性,定义对称损失如下
其中,T为网络层数。根据式(20)和式(21),LSISTA网络的全局损失函数定义为
其中,β为损失函数权重,在后续实验中其值默认设置为0.01,在实际应用中,通常可以采用黄金分割法搜索最优超参数。
考虑在三维SAR成像领域,通常难以获得足量的实测数据作为训练样本。因此,本文根据三维SAR成像模型参数,生成仿真训练数据集。受文献[28]等工作启发,本文从MNIST数据集中随机抽取手写数字图片作为原始目标。考虑到MNIST原始数据集手写数字图片尺寸为20×20,通过插值生成像素为512×512的参考场景图片,并且将插值后图像的像素值归一化。则SAR原始场景可由下式生成
其中,xm,n为所生成的复值散射系数,im,n为归一化参考MNIST手写数字图片像素值。
其中,F表示截断算子,将大尺寸SAR图片X通过二维频谱截断,映射至测量空间(通常维度更低)。而 P定义了零填充算子,将回波补零至目标SAR图像相同维度。N表示噪声等外部干扰。M表示采样稀疏掩码,其元素分别为0和1,其中0表示未采样,1表示采样点。因此,根据式(23)和式(24),可以产生任意数量的{E,X}样本对,以训练SAR成像网络。本文训练样本对数量默认为1000,为提升训练样本的多样性,信噪比设置为0~20 dB随机浮动,采样率设置为10%~90%随机浮动(本文所述欠采样规则均默认为均匀随机欠采样)。
4 实验论证和分析
通过近场毫米波三维SAR仿真和实测实验论证所提LSISTA网络的有效性。对比方法包括以下3类:(1)经典毫米波三维SAR成像算法:RMA[29];(2)稀疏成像算法:ISTA;(3)深度学习三维SAR成像网络RMIST-Net[26]。基于网络的成像方法在Py-Torch深度学习框架下实现,学习率初始化为0.001,并随着训练周期逐渐衰减。未特别指明的情况下,深度网络方法迭代层数固定为3层。稀疏成像算法(ISTA和ADMM)的终止条件为迭代索引超过20,或优化量低于 1×10-6。以下,所有实验均基于同一PC平台,该平台内存为64 GB,并配置12代英特尔i7-12700K CPU以及英伟达RTX3060 GPU(显存为12 GB)。
为了定量地评估各方法的重构性能。本文采用了两类评估指标:基于真值参考的平均绝对值误差MAE,其定义如下
图像熵通常用来评估SAR图像的聚焦程度,其值越低表明图像聚焦度越好。
4.1 基于MNIST测试集的性能分析
考虑采用和训练集同分布的数据进行性能测试。仿真系统参数和训练集所对应的SAR系统参数相同,具体为:载频77 GHz,发射信号带宽为3 GHz,合成孔径大小为0.5 m×1.0 m,x方向和z方向采样间隔分别为1 mm和2 mm,目标距离为0.5 m。基于MNIST测试集,生成了和训练集同源的仿真回波样本。首先,设置回波信噪比为20 dB。图3给出了RMA,ISTA,RMIST-Net和LSISTA在70%和30%采样时的重构结果。从图3可以看出,RMA算法在欠采样回波中无法精确重构,其成像结果中存在严重噪声串扰。这是因为随机欠采样破坏了回波空域均匀间隔特性。或者,在欠采样过程中,导致回波数据量不满足Nyquist采样准则要求,从而引起了成像精度损失。然而,基于CS理论的重构算法(ISTA,RMIST-Net,LSISTA)获得了更加干净的成像背景,表明CS理论可以在欠采样精确恢复原始图像,有助于增强SAR成像性能。相比于RMIST-Net,所提LSISTA能够较为精确地重构目标的面特征,这是因为CNN稀疏表示模块挖掘了场景的可压缩特性,进一步提升了重构性能。表1给出了各算法MAE评估值。可以看出,在不同采样率下,所提LSISTA评估得出最低MAE指标,验证了所提方法的有效性。

表1 各算法在不同采样率情况下的MAE值Tab.1 MAEs of different algorithms in cases of sampling rate being 70% and 30%,respectively

图3 各算法在采样率分别为70%和30%时的重构结果Fig.3 Reconstructions of different algorithms in cases of sampling rate being 70% and 30%,respectively
然后,将采样率固定为50%,图4给出了回波信噪比分别为10 dB和0 dB时各算法的成像结果。可见相比于其他算法,所提LSISTA成像网络在两种信噪比下,重构数字图案轮廓完整且纹理重建良好,背景杂波干扰低。而ISTA和RMIST-Net算法由于直接利用场景的固有稀疏特征,其成像结果虽然抑制了背景杂波,然而却广泛存在着散射点丢失、幅值畸变、面目标不连续等现象。这进一步证明了本文所设计稀疏表征模块对提升算法重构性能的有效性。表2采用MAE定量评估了各算法的性能,其结果表明,LSISTA成像网络在两种信噪比下均获得了更低的MAE值,证明了所提算法的鲁棒性。

表2 各算法在不同SNR情况下的MAE值Tab.2 MAEs of different algorithms in cases of SNR being 10 dB and 0 dB,respectively

图4 各算法在SNR分别为10 dB和0 dB时的重构结果Fig.4 Reconstructions of different algorithms in cases of SNR being 10 dB and 0 dB,respectively
4.2 三维SAR成像仿真实验
本节给出一系列三维SAR成像仿真分析,旨在(1)探究所提LSISTA在与训练集分布不同的测试数据中的重构性能;(2)探究与训练集数据对应的系统参数、成像几何模型不同时,LSISTA成像网络的泛化性能。具体仿真参数如表3列出。成像目标为如图5所示的F16三维模型,其尺寸经过了一定的放缩。F16模型由79154个独立的散射点构成。在生成回波阶段,将散射点幅值归一化,并且赋予其随机初始相位。在成像处理时,仿真回波脉压后提取目标距离单元,最终生成仿真回波的维度为512×512×35,对应35个等距离切片。图6给出了当噪声强度固定为20 dB时,各算法在降采样率为50%和30%时的三维成像结果。可以看到,RMA算法在降采样后获得的图像存在严重噪声污染,F16目标几乎被周围杂波淹没,这势必对后期的解译处理带来困难。相比之下,基于CS的成像算法在抑制旁瓣、降低噪声干扰方面表现了良好的效果,获得了聚焦的三维SAR图像。其中,ISTA在采样率为30%时,依然可以看到较弱的噪点,表明ISTA在低采样率时,其性能存在不足。在实验中,将ISTA的算法参数设为RMIST-Net和LSISTA的初始化值,旨在验证深度学习成像框架的有效性。对比ISTA,RMIST-Net和LSISTA发现,基于深度学习的成像算法获得了更加清晰的成像结果,证明了学习成像框架的有效性。除此之外,我们注意到RMIST-Net在较低采样率时存在着散射点丢失的问题,而LSISTA却保留了相对完整的目标散射特征信息,进一步证明了所提网络的有效性。
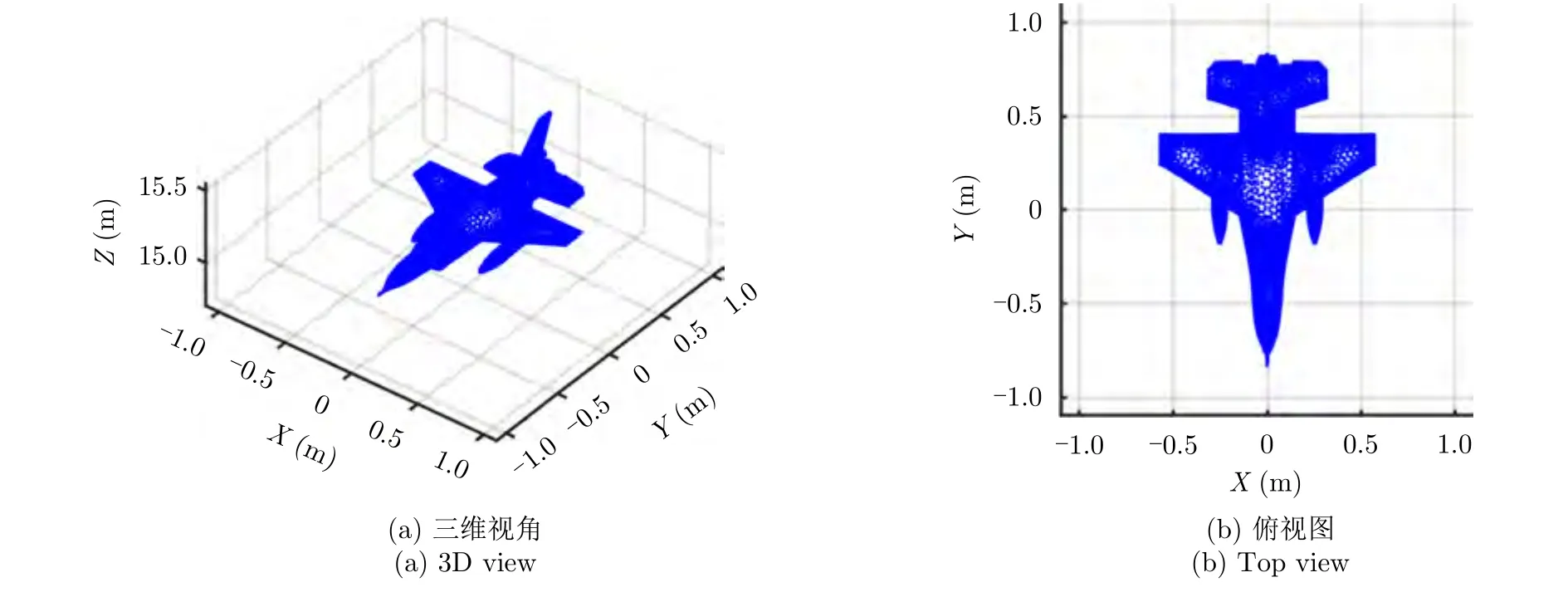
图5 F16三维模型Fig.5 3D F16 model

表3 仿真和实测系统参数Tab.3 Parameters in simulations and real experiments
图7给出了50%降采样率条件下,信噪比为10 dB和0 dB时各算法的成像结果。从中可以看到,RMA算法在低信噪比下,成像结果中含有大量的噪声背景,干扰了目标的聚焦精度。相比之下,基于CS的ISTA和RMIST-Net算法抑制了部分噪声背景,然而其成像结果依然难以避免地出现了弱噪声斑。而所提LSISTA成像网络在两种信噪比条件下,均获得了更优的成像质量,其图像背景清晰,几乎无噪声斑,且目标的轮廓重构完整度良好。此外,在信噪比降低时,LSISTA方法相比于其他算法重构性能衰减较缓,这证明了所提成像网络对噪声的鲁棒性。
最后,表4和表5分别给出了图6和图7各成像结果的图像熵评估值。其中,RMIST-Net在大多数情况下获得了最低的图像熵,然而图6和图7相应的成像结果表明RMIST-Net图像存在着散射点丢失的问题。推测RMIST-Net的低图像熵指标一方面来自其良好的聚焦度,另一方面是因为其成像结果丢失了部分散射点。除RMIST-Net外,所提LSISTA获得了较低的图像熵,进一步证明了所提算法在三维SAR仿真成像中依然表现良好。
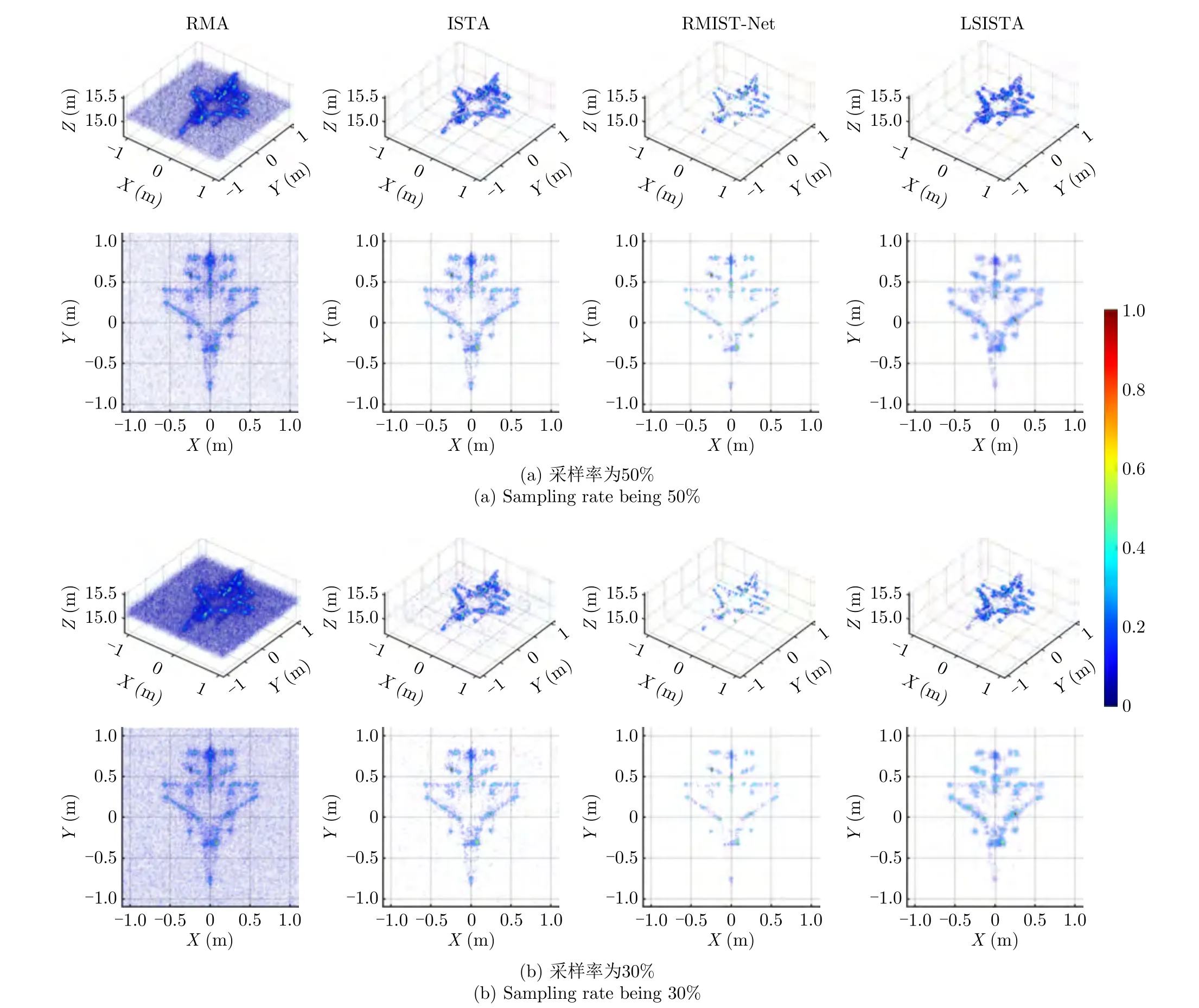
图6 各算法在采样率为50%和30%时的三维仿真成像结果Fig.6 3D imaging results of different algorithms in cases of sampling rate being 50% and 30%

图7 各算法在信噪比分别为10 dB和0 dB时的三维仿真成像结果Fig.7 3D imaging results of different algorithms in cases of SNR being 10 dB and 0 dB
表4和表5右列均给出了各算法在CPU和GPU平台上成像处理运行时间。可以看到,在CPU平台上RMA算法成像处理速度最快,这得益于其简洁的计算处理步骤。ISTA算法受限于其冗长的迭代步骤,表现了较低的计算效率。而所提LSISTA算法的运行时间长于RMIST-Net,这是因为相比于RMIST-Net其计算图中卷积推断占用了一部分处理时间。但是,得益于GPU平台的并行化处理,LSISTA和RMIST-Net可加速至相当水平。
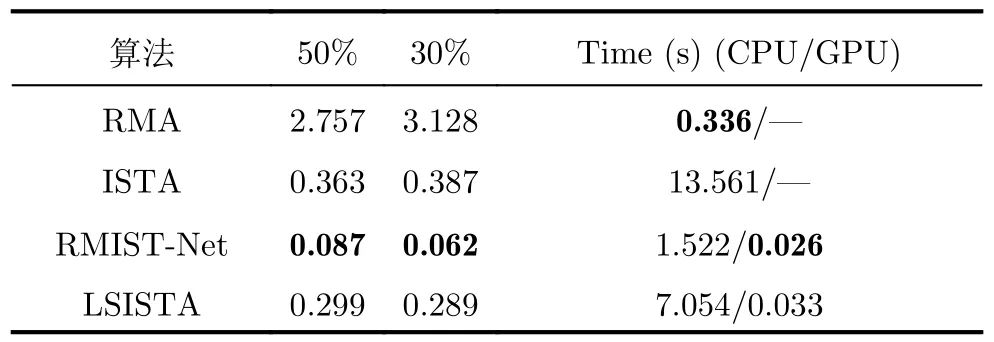
表4 三维SAR成像仿真在不同降采样率下各算法的图像熵评估Tab.4 Image entropy of different algorithms with different sampling rates in simulated 3D SAR imaging
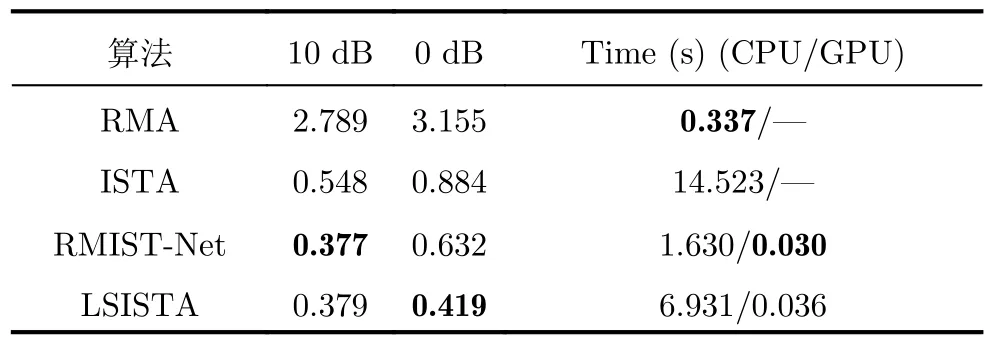
表5 三维SAR成像仿真在信噪比下各算法的图像熵评估Tab.5 Image entropy of different algorithms with different SNRs in simulated 3D SAR imaging
4.3 基于实测数据的算法性能论证
本节采用基于毫米波三维SAR实验验证平台所采集的实测数据对各算法的成像性能进一步验证。表3右列给出了验证平台的主要系统参数。成像系统平台和对应的成像场景如图8所示。
首先,考虑成像场景为摆放到距离SAR平台0.5 m钢片测试板(如图8(b)),其长宽分别为20 cm和15 cm。图9给出了在采样率为50%和30%时,各算法的成像结果。从中可以看出当采样率降低时,各算法的重构性能下降。其中,欠采样情况下RMA算法获得的图像中,目标完全淹没在噪声中。而ISTA算法和RMIST-Net虽然抑制了部分噪声,但其成像结果依然存在诸如散射点幅值估计不连续,散射信息丢失,背景杂波显著等问题。这是因为钢片测试板为典型弱稀疏目标,存在大量的连续面结构。而基于固有稀疏性假设的CS算法在重构场景包含孤立散射点,强散射区域不连续出现时,重构精度才能得到保证。因此,ISTA和RMIST-Net在该实验中获得重构性能退化的三维结果。而所提LSISTA成像网络由于集成了稀疏自学习先验信息,其成像质量在保留轮廓、重构纹理、抑制噪声等方面表现出明显优势。因此,进一步证明了所提基于稀疏自学习网络成像方法在实测数据处理中的有效性。此外,表6给出了图9中各成像结果的图像熵评估指标,结果表明所提LSISTA成像网络在欠采样率为50%和30%时,均获得更低的图像熵。这是因为LSISTA挖掘了成像场景的可压缩特性,几乎完全抑制了采样引起的噪声斑。

图8 毫米波三维SAR验证平台及实验场景Fig.8 3D mmW SAR imaging system and experimental scenarios

图9 各算法在采样率为50%和30%时钢片测试板的三维成像结果Fig.9 3D imaging results of the testing steel chip by different algorithms when sampling rate are 50% and 30%
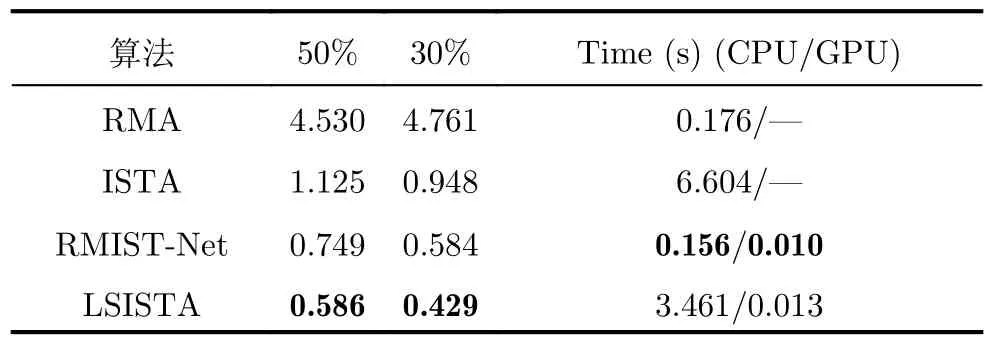
表6 图9成像实验中各算法的图像熵评估Tab.6 Image entropy of different algorithms in the experiment of Fig.9
其次,考虑在安检等领域中广泛关注的隐匿目标成像与检测问题。本文进一步构建了隐匿刀具成像场景。如图8(c)所示,目标为隐藏在长方体纸盒中的两把不同的钢质刀具。纸盒被放置在距离雷达平台37 cm的位置。我们选定成像空间为50 cm×50 cm×30 cm区域,由于纸盒目标在成像空间中占据大部分区域,因此该成像场景为典型的弱稀疏成像场景。图10给出了在采样率为50%和30%时,各算法的成像结果。可以看到,在稀疏采样时,RMA的三维成像结果中,纸盒几乎被噪声斑完全淹没。其等距离切片结果显示,刀具轮廓部分缺失,其细节部分被噪声污染严重。ISTA和RMISTNet所获得的成像结果虽然对噪声斑有一定抑制效果,但其等距离切片表明,目标刀具存在着面特征估计失真,散射点丢失等问题,影响了刀具目标的分辨。相比之下,LSISTA成像质量最优,其等距离切片显示,相比于其他算法所获得的成像结果两个刀具目标更加清晰可辨,其轮廓、表面、幅度重构相比之下更加精确。验证了所提算法在隐匿目标成像应用场景中的有效性。表7给出了图10中各算法成像结果的数值评估,其中,LSISTA的图像熵评估值最低,进一步佐证了上述结论。
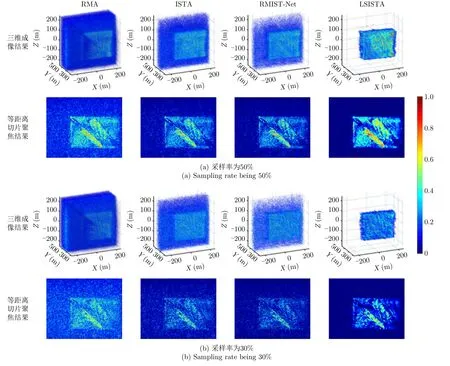
图10 各算法在采样率为50%和30%时隐匿刀具的成像结果Fig.10 Imaging results of conceal knives by different algorithms when sampling rate are 50% and 30%
此外,表6,表7右列记录了实测实验中各算法的运行时间。结果表明所提LSISTA成像网络运行速度在CPU平台上较RMIST-Net慢,这是因为CNN卷积模块正向推断增加了运算开销。而得益于GPU加速处理,可以使两者重构速度相当。

表7 图10成像实验中各算法的图像熵评估Tab.7 Image entropy of different algorithms in the experiment of Fig.10
5 拓展性讨论
5.1 理论计算复杂度分析
本文采用浮点运算次数(Floating-point operation,FLOP)评估各算法的计算复杂度。在讨论各算法复杂度之前,首先给出如下两个基本理论:
(1) 一次复数加法和复数乘法运算分别对应两次和6次浮点运算;
(2)N点FFT对应Nlog2N/2次复数乘法运算和Nlog2N次复数加法运算,共计5Nlog2N次浮点运算。
设将回波维度为Ny×N ×N,Ny表示距离向切片数,其中N ×N为阵列平面维度,且满足Ns=N ×N。ISTA算法迭代Niter次。RMIST-Net和LSISTA网络层数为T。首先,对于每一个距离切片,RMA算法执行两次二维FFT运算,一次矩阵点乘运算,其计算复杂度为NyNs(10log2Ns+12)FLOPs。ISTA和RMIST-Net网络每次迭代包括两次复矩阵加法,一次向量矩阵乘法,以及两次RM成像算子运算,其计算复杂度分别为ISTANiterNyNs(10log2Ns+12) FLOPs,RMIST-NetTNyNs·(10log2Ns+12) FLOPs。对于所提LSISTA网络,在RMIST-Net的基础上,引入了CNN稀疏表示模块,其计算复杂度为cNsFLOPs,其中c为系数,其值由卷积核尺寸、通道数决定。在本文所提LSISTA中,卷积核尺寸为 3×3,无偏置,各层通道数分别为1,8,8,1。则根据图2所示网络结构,CNN稀疏表示模块计算复杂度为2846NsFLOPs。因此LSISTA网络的计算复杂度为TNs(Ny(10log2Ns+12)+2846)FLOPs。综上所述,各算法计算复杂度如表8所示。

表8 各算法计算复杂度Tab.8 Computational complexity of different algorithms
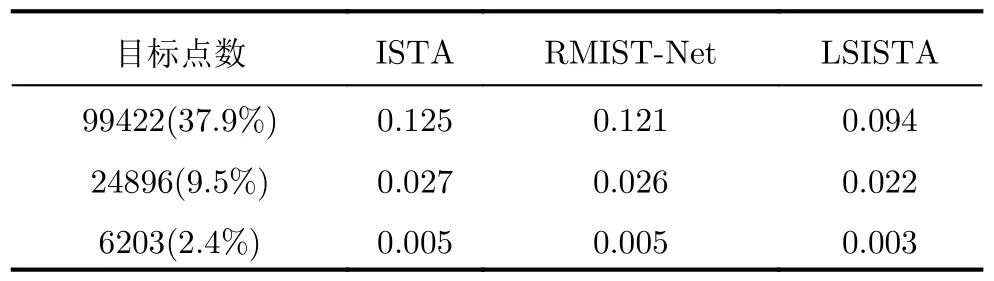
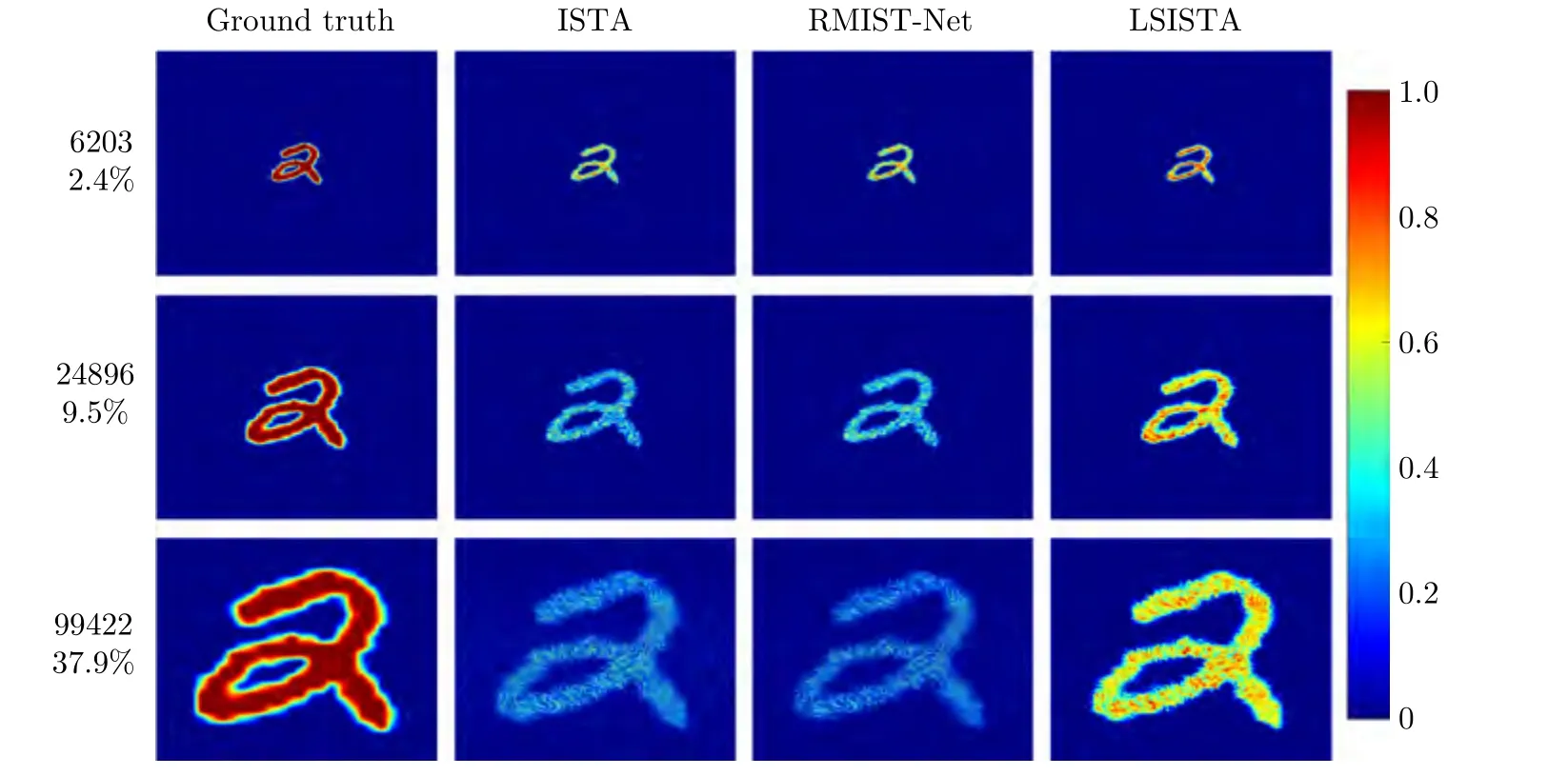
通过深度展开网络实现,T满足T ≪Niter。因此理论计算复杂度关系为RMA 为了进一步探究目标稀疏性对成像性能的影响,通过MNIST仿真数据验证了各算法在不同场景稀疏度下的成像性能。此外,定义稀疏度为场景中散射点数和离散化网格数量的比率。在实验中,本文将采样率固定为50%,回波信噪比为20 dB,探究了目标点数为6203,24896和99422(对应稀疏度分别为2.4%,9.5%和37.9%)时各稀疏成像算法的成像性能,图11给了相应的成像结果。 从图11可以看出,成像性能随着场景稀疏度降低而衰减。其中ISTA和RMIST-Net所得到的成像结果在稀疏度为9.5%和37.9%时,存在着目标丢失等问题,其重构面目标不连续。这是因为ISTA和RMIST-Net都是基于场景的固有稀疏先验信息,当稀疏度降低时,必然导致成像性能恶化。反之,可以看到,LSISTA所重构图像具有干净的图像背景,而且相比于其他算法所获得的成像结果数字目标更加清晰可辨,其轮廓、表面、幅度相对值重建相比之下更加精确。这是因为所提LSISTA网络通过CNN稀疏表示模块挖掘场景的可压缩特性,提升了在弱稀疏场景下的重构性能。表9进一步给出了各算法的MAE评估指标。可以看出在不同稀疏度的场景下,所提LSISTA网络均获得了最低的MAE值,进一步佐证了上述结论。 表9 各算法在不同目标点数时的MAE评估值Tab.9 MAEs in cases of the different number of target points 图11 各稀疏成像算法在不同目标点数时的成像结果Fig.11 Imaging results of different algorithms in cases of the different number of scatterers 本文针对传统稀疏三维SAR成像面临的运算效率低、超参数调试困难,在弱稀疏场景下重构精度受限的问题,提出了一种基于自学习稀疏先验的3D SAR成像方法,命名为LSISTA。不同于传统模式下矩阵-向量线性建模,本文推导并给出了基于频域的二维近似成像表征算子的核函数建模法,提升了成像处理效率,有效解决了传统大场景稀疏成像处理时内存爆炸的局限。基于核函数表征模型,给出了ISTA稀疏重建算法的迭代步骤,并以此为理论指导,构建了LSISTA骨干框架。并利用CNN的强拟合特性,建立了镜像结构的近端映射算子,可以自动学习场景的最优稀疏表征,从而提升算法在弱稀疏场景下的重构精度。最后,本文通过一系列实验验证了所提算法在保持高重构效率的同时,其成像精度得到提升。 本文初步验证了算法展开思想及卷积神经网络结构在三维SAR成像领域的可行性,且近年来,算法展开思想用于SAR辅助增强成像处理的工作不断涌现。但基于数据驱动的SAR成像算法研究依然存在众多开放研究性问题。诸如复数数据流高效处理、结构化先验信息挖掘、智能化运动误差补偿、SAR成像大规模数据集构建等关键科学问题仍需要进一步深化研究。5.2 场景稀疏度对算法成像性能的影响
6 结语
