基于自适应滑模观测器的中点钳位型三电平并网逆变器开路故障诊断
2023-03-04许水清黄文展何怡刚胡友强程庭莉
许水清 黄文展 何怡刚 胡友强 程庭莉
(1.合肥工业大学电气与自动化工程学院 合肥 230009 2.输配电装备及系统安全与新技术国家重点实验室(重庆大学) 重庆 400044)
0 引言
随着新能源发电的快速发展,并网逆变器作为连接新能源发电系统和公用电网的有效接口,具有举足轻重的作用。在各种并网逆变器拓扑中,中点钳位型(Neutral-Point-Clamped,NPC)三电平逆变器由于具有器件电压应力低、功率损耗小和输出电压谐波含量少等优点,得到了广泛应用[1]。然而由于运行环境多变,加上开关管器件数量较多且电路结构复杂,使得任何一个开关管故障均可导致NPC三电平并网逆变器无法正常工作,甚至引发二次故障,造成重大经济损失和安全事故。因此,NPC 三电平并网逆变器开关管故障诊断具有十分重要的研究意义和应用价值。
NPC 三电平并网逆变器开关管故障主要分为短路故障和开路故障[2]。短路故障由于具有演变速度快和危害程度大等特点,通常在逆变器中集成硬件检测装置和保护电路,将短路故障转化为开路故障来处理[3]。因而,本文主要研究NPC 三电平并网逆变器的开关管开路故障。目前,开关管开路故障诊断方法从技术上主要分为数据驱动法和模型法。
数据驱动法主要包括信号处理法[4-5]、人工智能法[6]以及两者相结合的算法[7]等。如文献[8]利用电流矢量瞬时频率和电流矢量瞬时角度来构造故障检测变量,提出了基于电流矢量特征分析的逆变器开路故障诊断方法。文献[9]首先采用基于累积和算法的故障监测方法,其次提出基于归一化输出电流平均值和绝对平均值的故障识别方法实现功率器件开路故障诊断。文献[10]首先利用滑动三角化处理提取相电流信号的多尺度趋势特征,然后利用回声状态网络进行故障分类从而实现微电网逆变器开路故障诊断。然而,数据驱动法过度依赖所获得数据的数量和质量,譬如人工智能法需要大量数据进行训练,复杂度较高,限制了其在实际工程中的应用。
模型法主要通过分析和估计实际逆变器输出与参考模型输出之间的残差来进行故障诊断[11]。如文献[12]通过建立三相逆变电路电流观测器,利用三相电流测量值与观测值之间的误差构造故障检测变量,实现开关管开路故障诊断。文献[13]利用龙伯格观测器观测三相电压源逆变器的输出电流,并利用输出电流特征设计自适应阈值以实现故障诊断。文献[14]设计了一种电流区间滑模观测器精确估计逆变器正常工作时的三相电流,并根据观测电流与测量电流的残差特征构造残差信息表实现开关管开路故障定位。文献[15]构造了三相电压源逆变器的微分电流观测器,并利用微分电流测量值与观测值之间的残差设计诊断变量,从而实现开路故障诊断。模型法具有诊断时间短和计算成本低等优点,然而如何建立精确的模型并设计合适的阈值是保证模型法有效性和鲁棒性的关键。
目前,国内外针对NPC 三电平逆变器的开关管开路故障诊断问题已取得了一些研究成果[16]。如文献[17]利用小波包能量谱熵提取桥臂电压信号特征,通过自适应矩估计小波神经网络建立故障字典,实现逆变器开路故障诊断。文献[18]根据NPC 三电平逆变器输出相电流均值识别故障相,随后在短时间内注入无功电流实现开关管故障定位。文献[19]提出了基于模型与数据处理相结合的NPC 三电平逆变器开路故障诊断方法,首先通过建立比例积分滑模观测器估计三相输出电流,然后对相电流和电网电压的故障特征进行数据处理实现故障定位。文献[20]提出了一种基于知识驱动和数据驱动的开关管开路故障诊断方法,首先利用Concordia 变换对故障电流样本进行处理,然后基于随机森林算法实现故障分类。文献[21]基于特征矩阵联合近似对角化和独立分量分析进行故障特征提取,然后利用神经网络实现了NPC 三电平逆变器开关管故障定位。然而目前这些故障诊断算法,算法复杂度较高,诊断时间较长且大多只能实现单管故障诊断。
针对上述问题,本文提出了一种基于自适应滑模观测器的NPC 三电平并网逆变器开路故障诊断方法。该方法首先设计了收敛速度快且显著抑制抖振的自适应滑模观测器;其次提出了基于电流形态因子的故障检测方法;然后利用电流残差构造故障定位变量进行故障定位;最后通过建立前次故障状态的自适应滑模观测器实现双开关管开路故障诊断。本文提出的故障诊断算法有如下优点:①建立了新的自适应滑模观测器:通过设计新型自适应趋近律,构建了收敛速度快且显著抑制抖振的自适应滑模观测器,输出电流估计更加精确;②提出了新的故障检测与定位方法:根据设计的电流形态因子,构造两个故障检测特征量并设计自适应阈值,同时结合电流残差构造故障定位变量进行故障定位,故障诊断结果准确性更高、鲁棒性更强;③提出了新的双管故障诊断方法:在首次故障发生后,通过用故障开关函数替代原开关函数来建立前次故障状态的自适应滑模观测器,能够验证首次故障诊断的准确性并实现双开关管开路故障诊断。实验结果验证了本文所提算法的有效性和鲁棒性。
1 NPC 三电平并网逆变器混合逻辑动态模型
1.1 正常状态下的逆变器混合逻辑动态模型
NPC 三电平并网逆变器拓扑结构如图1 所示。图中,逆变电路每相桥臂由四个开关管Qxj(x=a,b,c;j=1,2,3,4)、四个续流二极管VDxj和两个钳位二极管VD1x、VD2x组成;Udc为直流侧电压;R为等效电阻;L为滤波电感;O 为直流侧中性点。
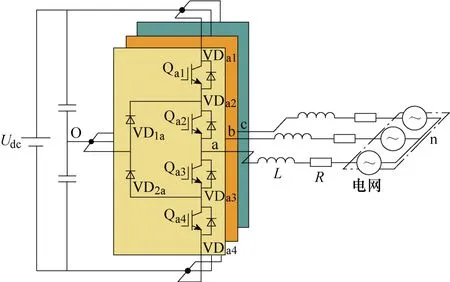
图1 NPC 三电平并网逆变器拓扑结构Fig.1 Topology of NPC three-level grid-connected inverter
由图1 可得系统状态方程为
式中,uan、ubn、ucn为逆变器三相相电压;ea、eb、ec为电网电压。
根据电路拓扑约束关系和星形联结特点可得
式中,σx为开关函数。由于σx受开关管和二极管导通状态影响,根据NPC 三电平逆变器的工作原理,σx可表示为
式中,on 为器件导通。
在此基础上,选取变量sxj表示开关管Qxj的开关状态,sxj=1 表示开关管导通,sxj=0 表示开关管关断。并引入变量μx表示电流方向,μx=1表示电流由逆变电路流出,μx=0表示电流流入逆变电路。以a 相为例,可得理想情况下a 相开关函数与开关状态的关系见表1。
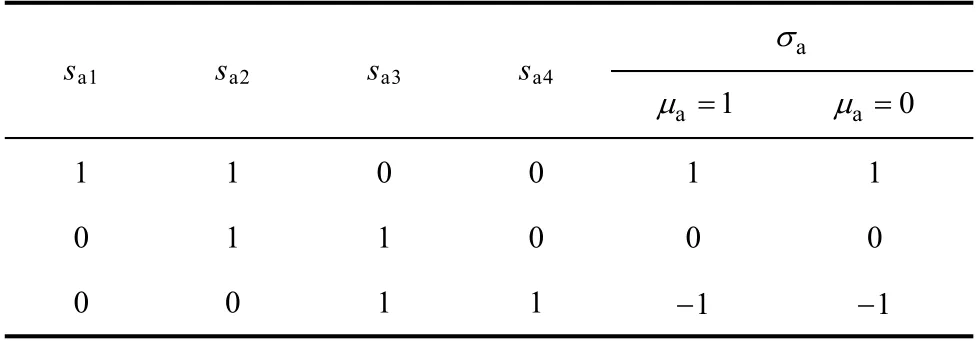
表1 理想情况下a 相开关函数与开关状态的关系Tab.1 The relationship between switching function and switching state of phase-a in the ideal case
由表1 可以看出,理想情况下开关状态sx1与sx3互反,开关状态sx2与sx4互反。然而,在逆变器实际运行中,为了防止开关状态切换过程中直流侧电容直通而设置死区,使得开关状态短时间内存在sx1=sx3=0 和sx2=sx4=0 的情况。例如,当开关状态sa1=0、sa2=1、sa3=0、sa4=0 时,若电流通过VD1a和Qa2流向交流侧,则σa=0如图2a 所示;若电流通过VDa2和VDa1流向直流侧,则σa=1如图2b 所示。类似地,可得到实际运行中a 相输出电压在不同开关状态和电流方向下开关函数见表2。
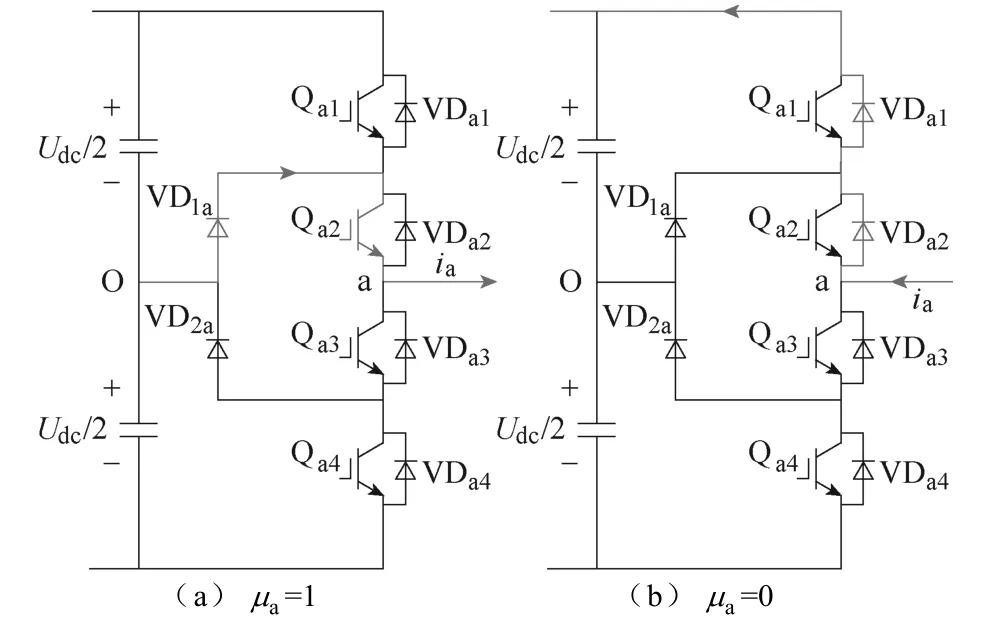
图2 sa 1 = 0,sa 2 = 1,sa 3 = 0,sa4=0时电流路径Fig.2 Current paths of sa 1 = 0,sa 2 = 1,sa 3 = 0,sa4=0

表2 实际运行中a 相开关函数与开关状态的关系Tab.2 The relationship between switching function and switching state of phase-a in practice
基于上述分析,在逆变电路正常工作状态下,由表2 进行逻辑运算,可推导出a 相开关函数σa为
类似地,可推导出NPC 三电平并网逆变器在正常状态下b 相和c 相开关函数为
由此可推导出,NPC 三电平并网逆变器正常状态下的混合逻辑动态模型为
进一步地,式(6)可以写为
式中,B为三阶单位矩阵。
1.2 故障状态下的逆变器混合逻辑动态模型
以a 相为例,当Qa1发生开路故障时,逆变器开关状态sa1=0,则由表2 可得,a 相桥臂在不同开关状态和不同电流方向下的开关函数见表3。
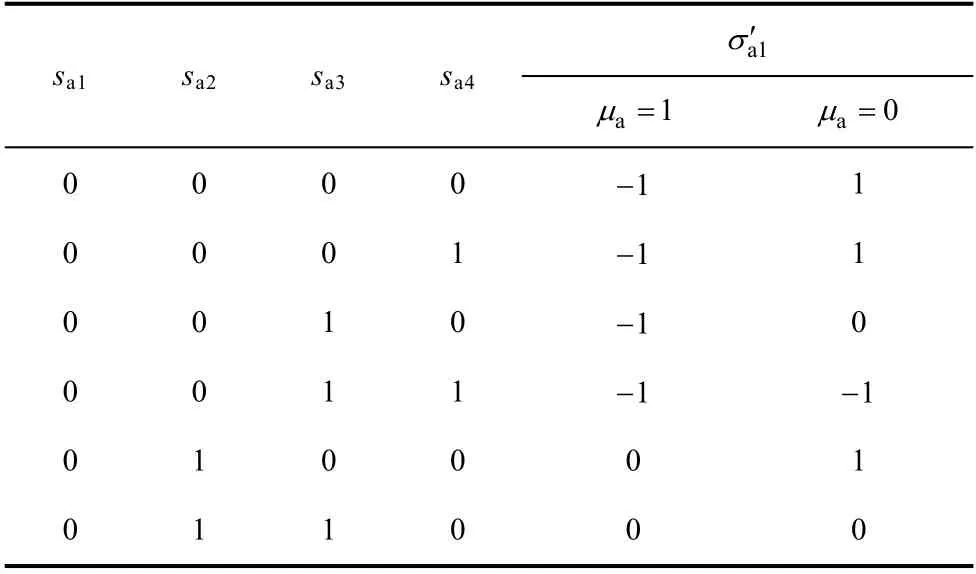
表3 Qa1 开路故障时a 相开关函数与开关状态的关系Tab.3 The relationship between switching function and switching state of phase-a in Qa1 open-circuit fault
由此,对表3 进行逻辑运算,可推导出Qa1开关管开路故障状态下a 相开关函数的表达式为
同理,可推导出Qa2、Qa3、Qa4开关管开路故障状态下开关函数的表达式分别为
由式(7)所示的NPC 三电平并网逆变器混合逻辑动态模型可知,系统输出电流取决于开关函数σ。当开关管Qxj发生开路故障时,将实际系统的开关函数等效成,则可得故障状态下的混合逻辑动态模型为
式中,i'为故障状态下的输出电流。
2 NPC 三电平并网逆变器故障诊断策略
在正常状态下,NPC 三电平并网逆变器输出电流值与观测器估计的电流值相等。而当NPC 三电平并网逆变器发生开路故障时,逆变器输出电流值将发生显著变化,不再等于观测器估计的电流值。基于上述性质,本文提出了一种基于新型自适应滑模观测器的NPC 三电平并网逆变器开路故障诊断策略,能够同时诊断单管和双管开路故障,且诊断速度较快,可靠性更高。本文所提出的诊断方法原理如图3 所示,主要包括自适应滑模观测器设计、单管故障诊断和双管故障诊断三个部分。
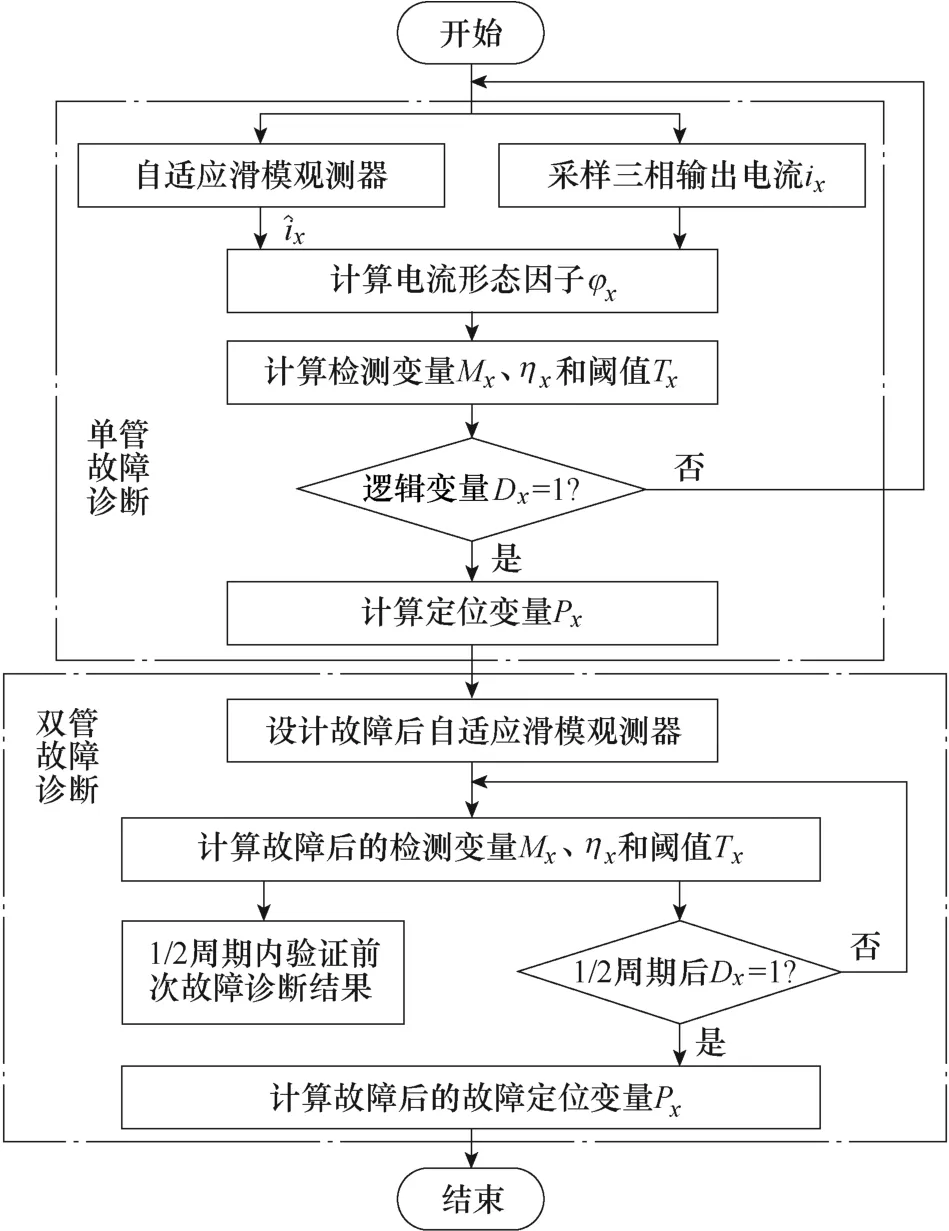
图3 故障诊断原理Fig.3 Principle of fault diagnosis
2.1 自适应滑模观测器设计
由于NPC 三电平并网逆变器在实际工作中存在测量噪声等未知干扰,因此,式(7)的混合逻辑动态模型可以进一步描述为
式中,i∈R3为输出电流;u=B1σ+B2e为输入变量;y∈R3为输出变量;v=[vavbvc]为有界未知扰动;C、D为三阶单位矩阵。
在此基础上,设计NPC 三电平并网逆变器的自适应滑模观测器为
式中,∈R3为观测器估计输出电流;S=y-为滑模面;f(S)为自适应趋近律且满足
定理 1:假设存在正定对称矩阵P∈Rn×n使得ATP+PA+I< 0成立,则误差动态方程
是渐近稳定的,e(t)=-i。
证明:选取如下的李雅普诺夫函数
对式(15)求导可得
当e(t)> 0时
当e(t)< 0时
由ζ<N(S)< 1和D为三阶单位矩阵可知,当观测器增益k的值大于有界未知扰动时,有
综上所述,若ATP+PA+I< 0,则<0,即观测误差能够渐近趋近于0,即。由此可得式(12)设计的自适应滑模观测器是稳定的。
基于式(13)设计的自适应趋近律,本文提出的自适应滑模观测器具有以下优点:
(1)收敛速度快:由式(13)知,当逆变器输出电流远离滑模面,即较大时,使得N(S)趋近于ζ,进而k/N(S)趋近于k/ζ。由 于0<ζ<1,k/N(S)值增大,表明到达滑模面的趋近速度增加,观测器收敛速度快。
2.2 故障检测方法
在构建NPC 三电平并网逆变器自适应滑模观测器的基础上,本节利用逆变器实际输出电流值与观测器估计电流值,构造两个基于电流形态因子的故障检测特征量,综合两个故障检测特征量,实现NPC 三电平并网逆变器开路故障的高准确性和强鲁棒性检测。
首先,根据NPC 三电平并网逆变器的开路故障分析可知,当开关管发生故障时,逆变器输出电流会发生畸变。因此,本文利用逆变器输出电流畸变特性,构造基于电流形态因子的NPC 三电平并网逆变器故障检测特征量Mx为
与此同时,利用自适应滑模观测器的估计电流值,设计故障检测特征量Mx的自适应阈值Tx为
当NPC 三电平并网逆变器正常工作时,可知φx>0 且Mx<1,Tx趋近于1。然而,当NPC 三电平并网逆变器发生故障时,相电流会发生一定程度的畸变,导致φx减小,增大,使得故障检测特征量Mx迅速超过阈值Tx,从而实现NPC 三电平并网逆变器故障相检测。
此外,为了消除测量噪声及未知干扰对故障检测的影响,提升故障检测的准确性和鲁棒性,避免故障误报和漏报,综合实际系统和观测器输出电流值,进一步构造故障检测特征量ηx为
由NPC 三电平并网逆变器的开路故障分析可知,发生开关管开路故障的桥臂其输出相电流畸变程度更大,因而可通过识别ηx的最大值来检测故障相。
结合故障检测特征量Mx和ηx,本文提出的NPC 三电平并网逆变器故障检测算法可表示为
若逻辑变量Dx=1,则x相发生故障。
从式(23)可知,当NPC 三电平并网逆变器无故障时,故障检测特征量Mx应小于阈值Tx,且故障检测特征量ηx和其他两相特征量相等,Dx=0。当NPC 三电平并网逆变器某相出现开关管开路故障时,其故障检测特征量Mx将超过阈值Tx,且故障检测特征量ηx将大于其他两相特征量,Dx=1。通过综合两个故障检测特征量,本文所提的故障检测算法能够降低噪声及未知干扰等对故障检测的影响,准确率更高、鲁棒性更强,大大避免了故障检测的误报和漏报。
2.3 故障定位方法
在实现NPC 三电平并网逆变器故障检测的基础上,本节根据故障状态下观测器电流估计值与实际电流值的残差,通过分析电流残差中所包含的故障信息,构造基于电流残差的故障定位变量,实现NPC 三电平并网逆变器开路故障定位。
首先,由NPC 三电平并网逆变器拓扑结构可知,当逆变器某相上桥臂发生开路故障时,该相输出电流上半波出现衰减,使得观测器电流估计值与正常电流值的残差大于零。当逆变器某相下桥臂发生开路故障时,该相输出电流下半波出现衰减,使得观测器电流估计值与正常电流值的残差小于零。因此电流残差可以用来定位逆变器发生开路故障的桥臂。此外,从式(9)和式(10)可知,同相上桥臂或下桥臂的两个开关管发生开路故障时,其实际系统输出电流具有不同的变化特性。因而可以进一步利用实际输出电流变化特性来定位逆变器桥臂发生开路故障的开关管。
综上所述,结合电流残差和实际输出电流变化特性,本文构造NPC 三电平并网逆变器开路故障定位变量Px为
考虑到测量噪声及未知扰动的影响,ξ设为在检测到故障之前逆变器正常工作时电流基波幅值的5%。结合NPC 三电平并网逆变器开路故障电流变化特性,由式(24)可知,当Qx1发生开路故障时,Px=3/2;当Qx2发生开路故障时,Px=-1/2;当Qx3发生开路故障时,Px=-3/2;当Qx4发生开路故障时,Px=1/2。
结合故障检测变量和故障定位变量,本文提出的NPC 三电平并网逆变器故障诊断策略可表示为
式中,Qxf为发生开路故障的开关管。本文提出的故障诊断算法能够检测和定位NPC 三电平逆变器单管开路故障。
2.4 双管开路故障诊断方法
在实现单管开路故障诊断的基础上,双管开路故障诊断策略如图3 中的双管故障诊断部分所示。图3 中,本文假设两个开关管发生故障的时间间隔大于1/2 基波电流周期,而不是同时发生故障,这是因为在实际中NPC 三电平并网逆变器的两个开关管同时发生故障的概率非常小。基于以上假设,在实现前次开关管开路故障检测和定位后,首先用1.2 节中推导出的故障后开关函数替代自适应滑模观测器中的正常状态开关函数,设计故障状态下的自适应滑模观测器,并估计出前次开关管开路故障下的输出电流。然后,基于观测器估计的故障电流,计算前次开关管开路故障后的故障检测变量和故障定位变量,从而实现第二个开关管开路故障诊断。
需要指出的是,利用故障状态下的自适应滑模观测器估计故障电流对于实现双管开路故障诊断具有重要意义。一方面,观测器估计的故障电流可用于检查前次开关管开路故障诊断结果的准确性,如果检测结果准确,基于观测器估计故障电流获得的故障检测变量不会超过自适应阈值,否则就会超过自适应阈值;另一方面,可利用估计故障电流和双管开路故障输出电流计算新的故障检测变量和故障定位变量,诊断双开关管开路故障。因此,在图3所示的双管故障诊断策略中,1/2 基波电流周期内的观测器估计故障电流用于验证前次开关管开路故障诊断结果的准确性,1/2 基波电流周期后的观测器估计故障电流用于诊断双开关管开路故障。综上所述,本文提出的故障诊断算法能够实现NPC 三电平并网逆变器双管开路故障。
3 实验验证
为验证本文所提出的NPC 三电平并网逆变器故障诊断方法的有效性和鲁棒性,搭建了如图4 所示的硬件在环实验平台进行实验,实验中的NPC 三电平并网逆变器主要参数见表4。此外,为便于观察,在实验测试完成后将信号保存在数字信号处理器中并导出至计算机,利用Matlab 重新绘制。
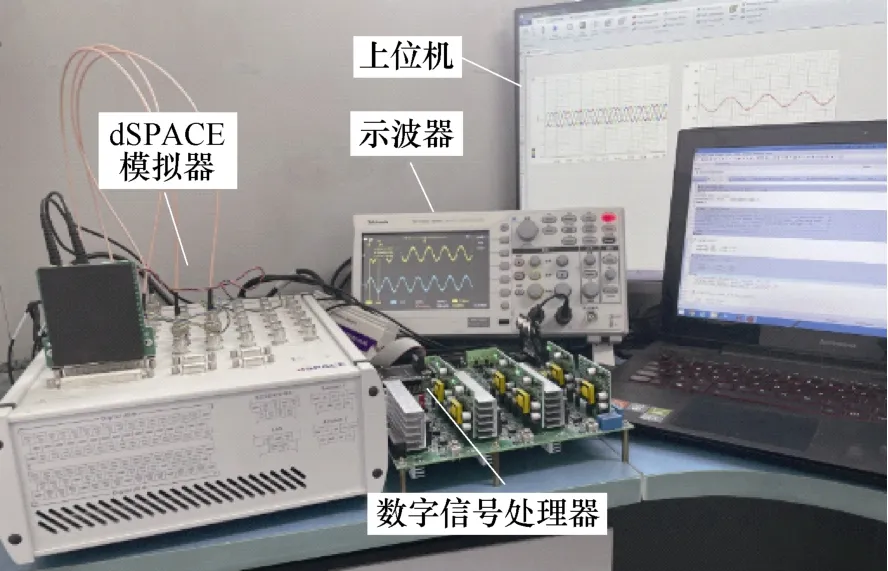
图4 硬件在环实验平台Fig.4 Hardware-in-the-loop experimental platform
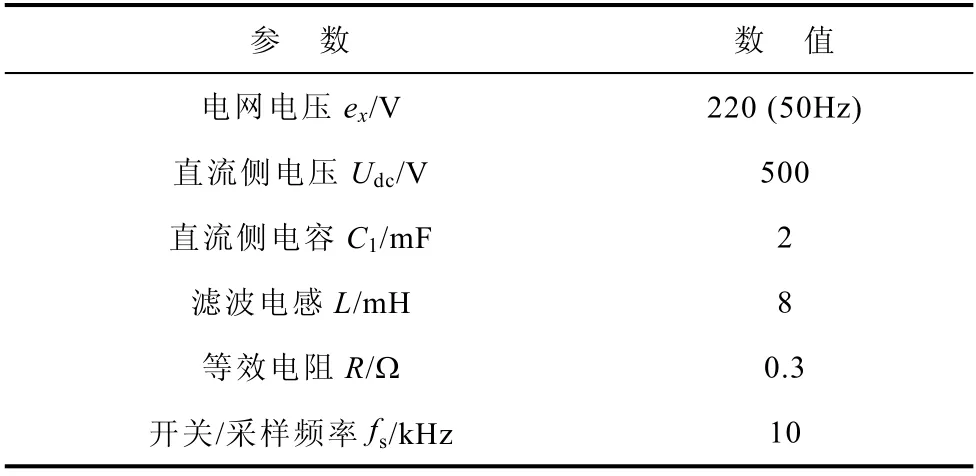
表4 NPC 三电平并网逆变器主要参数Tab.4 Main parameters of NPC three-level grid-connected inverter
3.1 单开关管开路故障诊断
图5 给出了NPC 三电平并网逆变器a 相Qa1开路故障诊断的结果。从图5 可以看出,当NPC 三电平并网逆变器未出现故障时,三相输出电流为正弦波,故障检测变量Ma远小于自适应阈值Ta,且检测变量ηa=ηb=ηc。当NPC 三电平并网逆变器发生Qa1开路故障后,三相输出电流均出现一定程度的畸变,检测变量Ma超过自适应阈值Ta,且此时检测变量ηa>ηb,ηa>ηc,表明逆变器a 相桥臂发生开路故障。同时,故障定位变量Pa=3/2,根据式(25)所示的故障诊断准则可定位出逆变器Qa1发生开路故障。
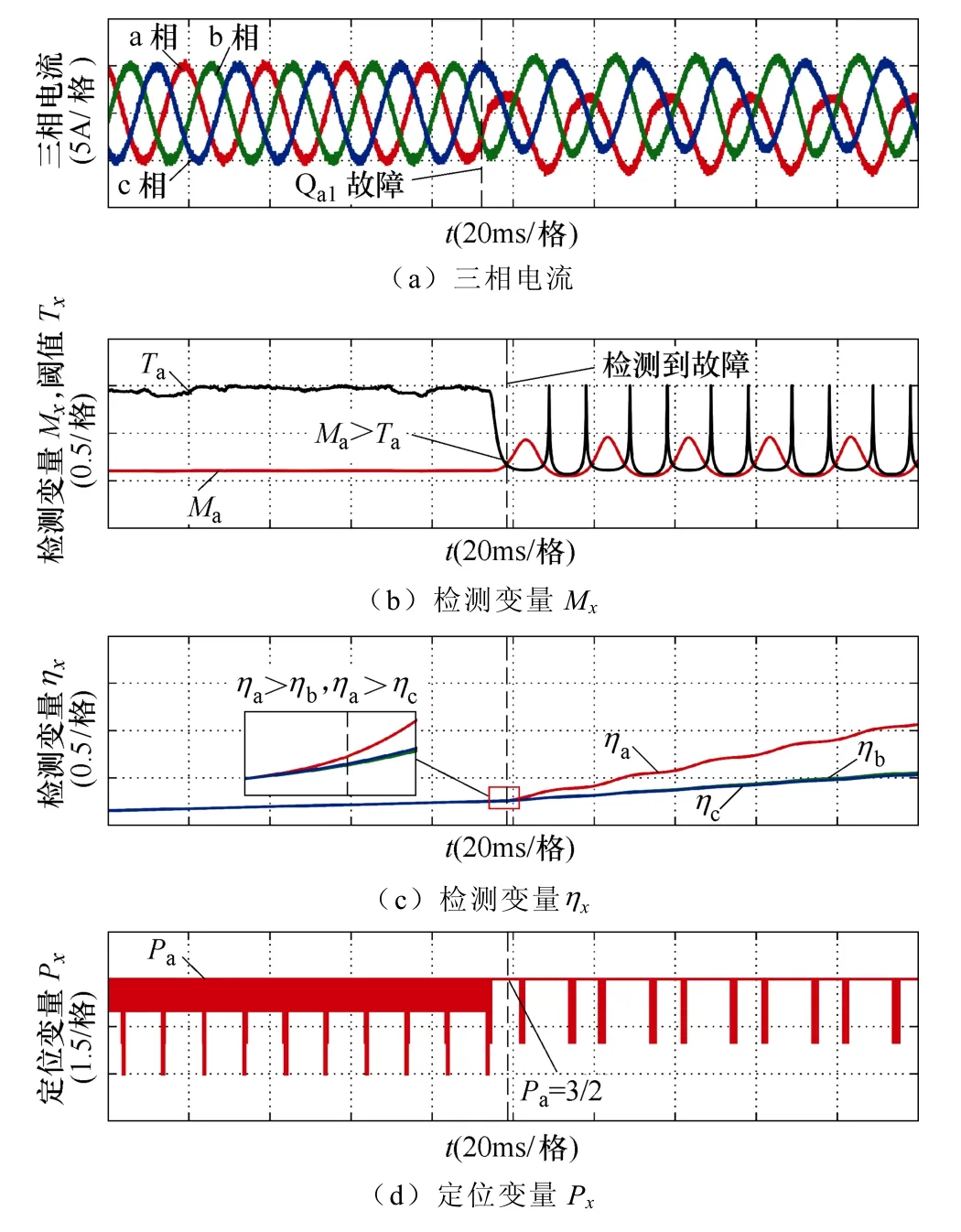
图5 Qa1 开路故障的实验结果Fig.5 Experimental results for the Qa1 open-circuit fault
为进一步验证所提故障诊断算法对不同开关管开路故障的有效性,图6 给出NPC 三电平并网逆变器b 相Qb2开路故障诊断的结果。从实验结果可以看出,当NPC 三电平并网逆变器发生Qb2开路故障后,故障检测变量Mb迅速增大,自适应阈值Tb减小,使得Mb>Tb,且此时检测变量ηb迅速增大并超过ηa和ηc,这表明逆变器b 相桥臂发生开路故障。同时,故障定位变量满足Pb=-1/2,可推导出NPC三电平并网逆变器Qb2发生开路故障。
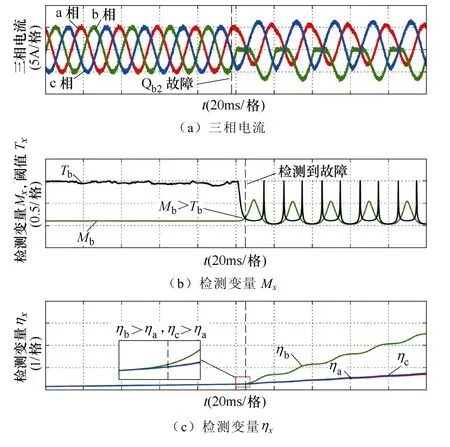
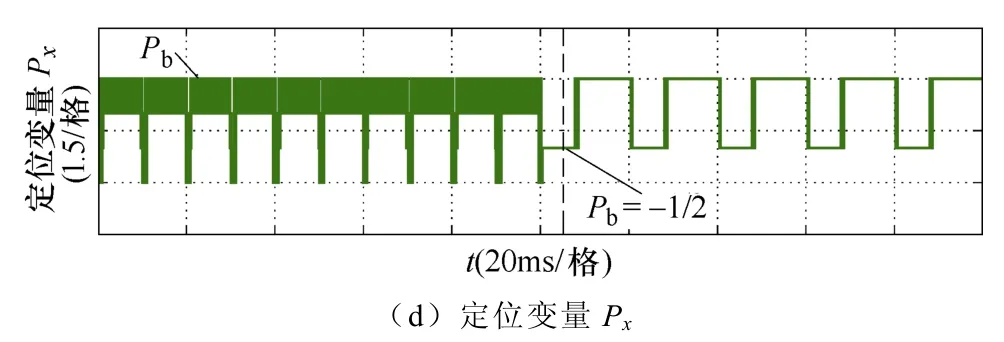
图6 Qb2 开路故障的实验结果Fig.6 Experimental results for the Qb2 open-circuit fault
3.2 双开关管开路故障诊断
为验证本文故障诊断算法对双开关管开路故障诊断的有效性,图7 给出了NPC 三电平并网逆变器a 相Qa1和Qa3开路故障诊断的实验结果。从实验结果可以看出,当Qa1发生开路故障后,故障检测变量Ma迅速增大并超过自适应阈值Ta,同时检测变量ηa同样增大并大于ηb和ηc,故障定位变量Pa=3/2,这表明,a 相Qa1发生开路故障。在检测出Qa1开路故障后,将Qa1故障状态下开关函数替换原开关函数σ,构造Qa1故障状态下的自适应滑模观测器。从图7 可以看出,故障检测变量Ma逐渐变小并低于自适应阈值Ta,验证了首次故障诊断结果的准确性。当a 相Qa3发生开路故障后,故障检测变量Ma开始超过自适应阈值Ta,且故障检测变量ηa也增加并大于ηb和ηc,而故障定位变量满足,Pa=-3/2,表明,a 相Qa3发生开路故障。从实验结果可以看出,本文所提诊断方法能够实现NPC 三电平并网逆变器双开关管开路故障诊断。
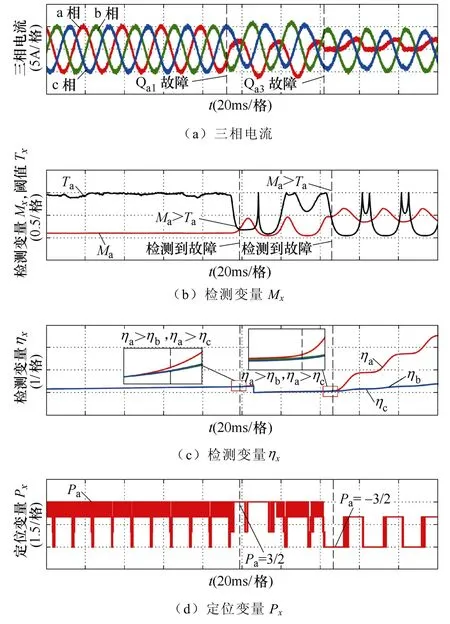
图7 Qa1 和Qa3 开路故障的实验结果Fig.7 Experimental results for the Qa1 and Qa3 open-circuit fault
为进一步验证本文所提算法同样适用异相双开关管开路故障诊断,图8 给出了a 相Qa1和b 相Qb1开路故障诊断的实验结果。由图8 的实验结果可以看出,当NPC 三电平并网逆变器发生Qa1开路故障后,检测变量Ma超过自适应阈值Ta,且检测变量ηa大于ηb和ηc,同时故障定位变量Pa=3/2,根据故障诊断策略可定位出Qa1发生开路故障。基于Qa1开路故障诊断的结果,将Qa1故障状态下开关函数σa'1替换原开关函数σ,建立Qa1故障状态下的自适应滑模观测器。从实验结果可以看出,基于Qa1故障状态下的自适应滑模观测器,故障检测变量Ma小于自适应阈值Ta,从而表明首次故障诊断结果的准确性。当b 相Qb1发生开路故障后,故障检测变量Mb逐渐增大并超过自适应阈值Tb,检测变量ηb同样增大并超过ηa和ηc,同时故障定位变量满足Pb=3/2,表明b 相Qb1发生开路故障。此外,从图8 可以看出,当Qb1发生开路故障后,故障检测变量Ma虽然也大于自适应阈值Ta,但此时故障检测变量ηa始终小于ηb,从而不会产生故障误检。实验结果表明,该方法同样能够有效诊断异相双管开路故障。
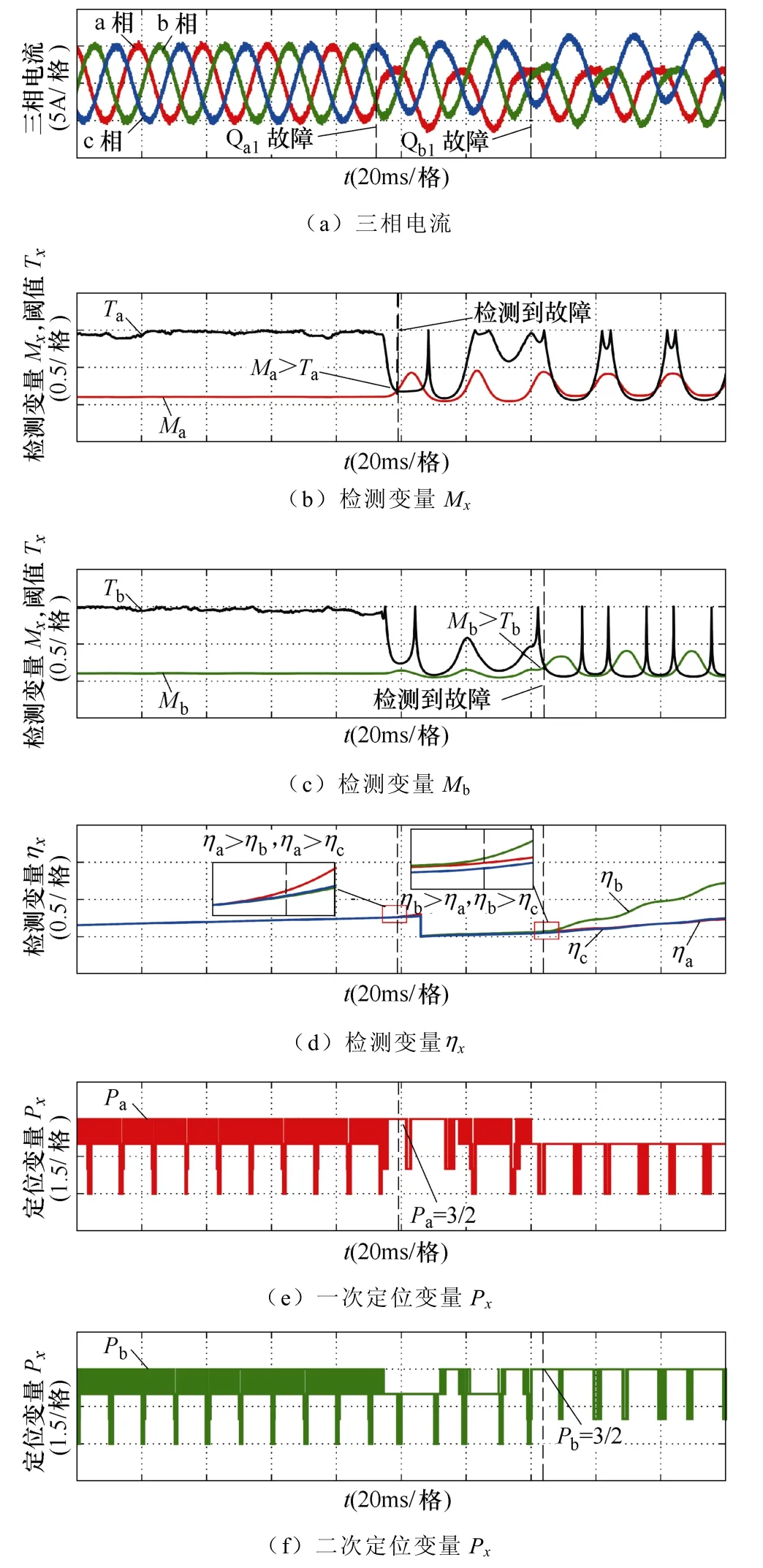
图8 Qa1 和Qb1 开路故障的实验结果Fig.8 Experimental results for the Qa1 and Qb1 open-circuit fault
3.3 电网电压波动时的鲁棒性验证
为验证本文所提诊断算法的鲁棒性与可靠性,图9 给出了电网电压波动下的a 相Qa1开路故障诊断结果。从实验结果可以看出,在电网电压发生波动之前,故障检测变量Ma、Mb、Mc均远离其对应的自适应阈值Ta、Tb、Tc。当电网电压从220 V 上升到305 V 后,尽管故障检测变量Ma、Mb、Mc均有一定程度的波动,但仍远远小于其对应的自适应阈值,不会产生故障误报。当引入Qa1开路故障后,故障检测变量Ma逐渐增大并超过自适应阈值Ta,此时自适应阈值Tb、Tc虽出现相对剧烈的波动,但仍大于故障检测变量Mb、Mc,因而仍可以正确判断出a 相开关管发生开路故障。因此,实验结果表明该方法对电网电压波动等干扰具有强鲁棒性,诊断稳定性高。
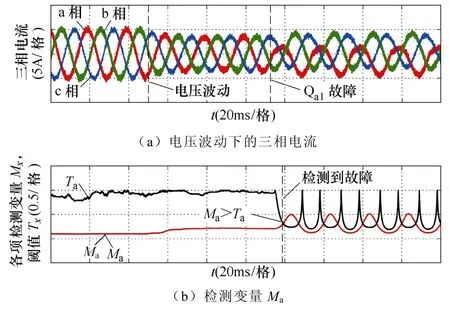
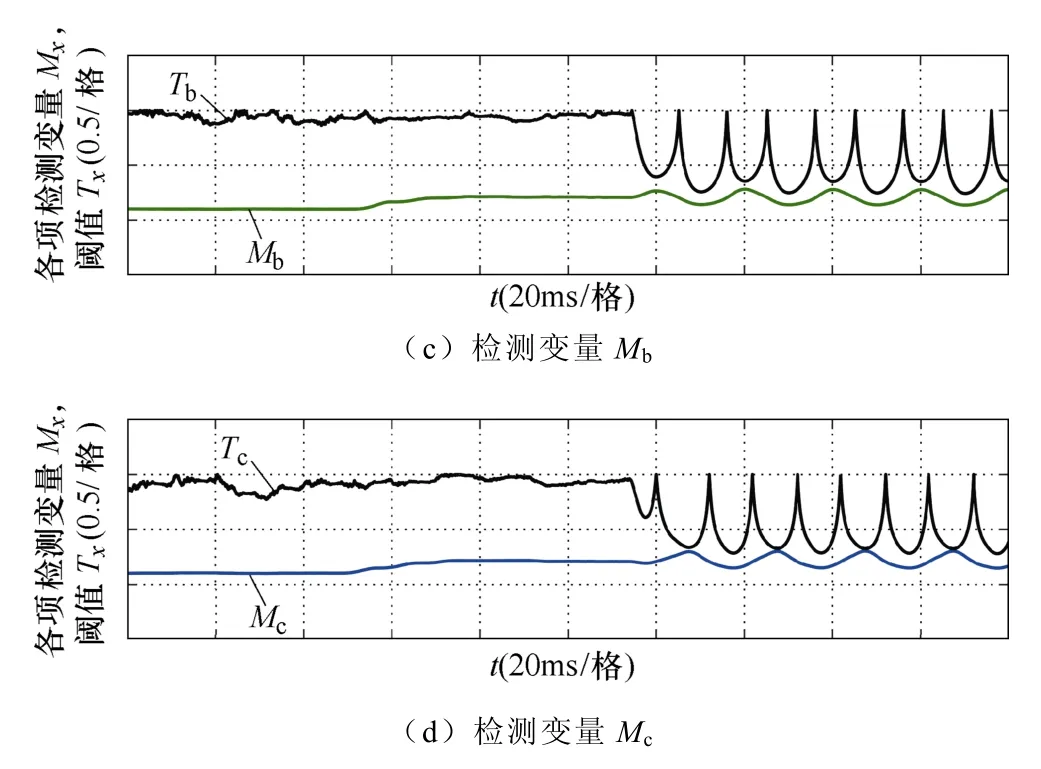
图9 电网电压波动时Qa1 开路故障的实验结果Fig.9 Experimental results for the Qa1 open-circuit fault under grid voltage fluctuation
4 方法对比分析
4.1 观测器性能对比分析
NPC 三电平并网逆变器的输出电流精确估计是利用模型法实现开路故障诊断的核心。为了更直观地说明本文所提新型自适应滑模观测器的性能,本节将所提出的自适应滑模观测器与文献[22]中的传统滑模观测器以及文献[23-24]中的改进滑模观测器进行性能比较,实验结果如图10 所示。从图10b的实验结果可以看出,与文献[22]中传统滑模观测器以及文献[23-24]中的改进滑模观测器相比,本文所提的自适应滑模观测器不仅收敛速度快,能够快速跟踪系统输出电流,而且还能够显著削弱稳定时的抖振。因此,本文所提的自适应滑模观测器具有更好的动态和稳态性能。
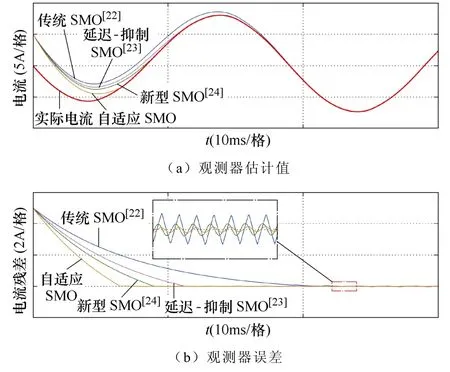
图10 不同观测器性能比较Fig.10 Performance comparison of different observers
4.2 诊断方法对比分析
为了进一步验证本文所提故障诊断方法的有效性,本节把本文方法与文献[7,12,18-20]中诊断方法进行对比见表5。首先在故障检测时间上,文献[7,20]分别采用了概率神经网络和随机森林算法等智能算法进行故障检测,其故障检测时间大于一个电流基波周期。文献[18]采用相电流周期均值法进行故障检测,其检测时间为一个电流基波周期20 ms。文献[19]提出的比例积分滑模观测器法的最大故障检测时间为16.66 ms。文献[12]提出的电流观测器法虽诊断时间较短,但只能实现三相两电平逆变器的单管开路故障诊断。图11 给出了本文所提算法在NPC 三电平并网逆变器开关管不同时间发生开路故障时的故障检测时间。从实验结果看出,尽管本文方法能够同时诊断NPC 三电平并网逆变器的单管和双管故障,故障诊断能力更强,但无论逆变器开关管何时发生故障,其最大检测时间仍小于14 ms,克服了检测时间通常大于一个电流基波周期的缺点,检测速度较快。

表5 诊断方法对比Tab.5 Comparison of the relevant diagnostic methods
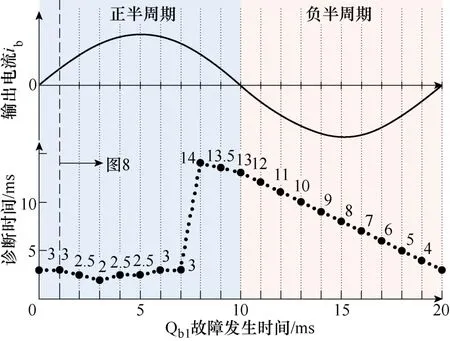
图11 Qb1 开路故障的检测时间Fig.11 The detection time for the Qb1 open-circuit fault
此外,文献[18]通过注入无功电流实现开关管故障定位,需要额外的辅助操作,复杂度较高,且只能诊断单开关管开路故障。文献[19]提出的比例积分滑模观测器法,需要较多的数据量,且只能实现单管和异相双管故障诊断。文献[20]首先利用Concordia 变换对故障电流样本进行处理,然后基于随机森林算法实现故障分类,该方法虽能够实现双管故障诊断,但需要大量的数据且复杂度较高。文献[7]同样采用复杂度较高的智能算法进行故障分类,需要大量的数据且只能诊断单管故障。而本文提出的自适应滑模观测器法,只需利用逆变器输出电流来构造故障诊断变量,无需增加额外硬件配置,且避免了智能算法对大量训练样本的需求,通过设置自适应检测阈值保证了故障诊断的准确性和鲁棒性,检测时间较快,能够同时实现单管和双管故障诊断。因此,本文所提算法易于实现,且更能全面地诊断NPC 三电平并网逆变器开路故障。
5 结论
本文针对NPC 三电平并网逆变器开关管单管和双管开路故障,提出了一种基于自适应滑模观测器的开路故障诊断方法。首先通过开关管开路故障特征分析,建立了逆变器在正常状态和开关管故障状态下的混合逻辑动态模型。然后为实现系统输出电流的精确估计,构建了收敛速度快且显著抑制抖振的自适应滑模观测器。在此基础上,利用实际系统和观测器输出设计了基于电流形态因子的故障检测变量,并提出了基于电流残差的开路故障定位方法。此外,在首次故障发生后,通过用故障开关函数替代原开关函数,提出了基于首次故障状态观测的双管开路故障诊断方法。本文所提方法诊断速度快,鲁棒性强,能够同时实现单管和双管开路故障诊断,且避免使用大量故障样本和额外的附加硬件。实验验证了本文所提诊断方法的有效性和鲁棒性。