3D密码的7轮子空间迹区分器
2023-03-01刘文豪
杨 阳 刘文豪 曾 光
(信息工程大学密码工程学院 郑州 450000)
1 引言
2008年,Nakahara[1]在CANS2008上提出3D密码。3D密码可视为3维的AES算法,将 4 ×4的字节矩阵扩展为 4×4×4,分组长度和密钥规模均为512 bit,共22轮。
3D密码设计理念新颖,对它的安全性分析自提出起持续至今。2010年王美一等人[2]提出了9轮3D密码的Square攻击,唐学海等人[3]给出了9轮不可能差分攻击,之后Nakahara[4]将不可能差分攻击提升到10轮。2012年,苏崇茂等人[5]构造出3D密码的5轮中间相遇区分器,给出了10轮中间相遇攻击,Koyama等人[6]于同年给出11轮3D密码的截断差分分析,成功率约为24%。2014年,谢作敏等人[7]给出了11轮3D密码的不可能差分攻击。2015年,任炯炯等人[8]给出了11轮3D密码的中间相遇攻击。2021年,Hou等人[9]利用3D密码的6轮yoyo区分器,给出了实际可行的7轮3D密码算法的密钥恢复攻击。
在关注对3D密码的攻击的同时,可以发现上述攻击使用的区分器轮数均小于7轮。Square攻击使用了5.25轮、6.25轮区分器,11轮3D密码的不可能差分和中间相遇攻击均构造出6轮区分器,且区分优势均为 2−504,区分3D密码与随机函数所需数据量不低于 2252.5。7轮3D密码的yoyo攻击使用了6轮yoyo区分器。为突破现有的区分器轮数,本文研究子空间迹分析方法在3D密码上的应用。
2016年,Grassi等人[10]提出了子空间迹的概念。子空间迹不强调子空间结构在轮函数下的不变性,而是表现了子空间结构在轮函数下变化的规律,进而利用具有一定规律的子空间迹建立区分器。自提出以来,子空间迹主要用于对AES,Midori等SPN密码算法的分析[11],利用该方法在构造区分器或进行密钥恢复时,不需要S盒的具体信息。
下面描述基于子空间迹的区分器—结构区分器。
2017年文献[12]利用子空间迹,找到了AES的新性质——穷举子空间Di的全部明文对,经过5轮加密,将有固定倍数个密文对的差分属于子空间MJ(子空间Di和MJ将在第3节中定义)。将这样的“n倍”性质与明确子空间迹结合,构造出5轮AES子空间迹结构区分器。同年,Grassi[13]给出了基于AES结构区分器的混合差分攻击。2019年Boura等人[14]给出了结构区分器的构造条件。2020年,Grassi等人[15]利用子空间迹给出9轮AES-128的选择密钥区分器。2021年,Grassi等人[16]对P-SPN结构及Hades结构进行子空间迹分析并给出判断线性层是否易受攻击的工具。
子空间迹分析方法在构造区分器上有独特的优势,往往可以找到轮数更长的区分器。本文将基于子空间的性质,寻找3D密码的7轮区分器。
第2节介绍3D密码算法,定义其子空间并研究子空间传播规律;第3节证明了3D密码两个子空间交集为0,由此给出在选择明文条件下,区分优势最大的6轮3D密码差分区分器,进一步给出首个7轮3D密码的子空间迹不可能差分区分器;第4节介绍兼容、信息集、等价关系的定义及相关定理,说明了3D密码特定子空间与S层的可兼容性,据此给出3D密码的7轮结构区分器;第5节总结成果并提出开放性问题。
2 初步准备
2.1 3D密码算法
3D密码算法的分组规模和密钥规模都是512 bit,迭代轮数为22轮。分组状态表示为64 Byte的形式,可视为4个子块的联结

3D算法采用SPN结构,轮函数依次由非线性变换、行移位、列混合变换、密钥异或这4个变换组成。具体介绍如下。
非线性变换γ。使用AES的8 bit S盒。
行移位θ1, θ2。θ1是 对3D密码的4个子块做AES的行移位变换,θ2是将字节块视为一个整体进行行移位。θ1将式(1)中的状态矩阵变为


密钥异或KeyAdd。将状态矩阵与轮子密钥对应字节进行模2加运算。
密钥扩展算法与子空间迹分析无关,在此不做介绍。记Ek和Ek′分别表示奇数轮和偶数轮加密函数,旨在突出两种行移位变换,不区分圈子密钥。使用Fkm表示m轮3D密码加密函数。a加密一轮的结果为Fk(a)=π·θ·γ·KeyAdd(a)。为保证3D密码算法加脱密相似性,算法在最后一轮省略列混合变换。
2.2 3D密码的子空间与传播规律




3 3D密码的子空间迹不可能差分区分器
本节研究3D密码子空间的交集性质,寻找交集为{0}的两个子空间,构造出区分优势最大的6轮3D密码不可能差分区分器。文献[10]介绍了一种将密钥恢复攻击转化成区分器的技术,能把基于子空间迹区分器的攻击变为新区分器,从而延长区分器轮数。将这种技术应用于3D密码,首次构造出3D密码的7轮子空间迹不可能差分区分器。
3.1 3D密码子空间的交集性质及6轮子空间迹不可能差分区分器
研究子空间的交集性质对子空间迹分析有重要意义,根据迹端点的交集属性,可以得到较长迹的可预测子空间属性,原因是两个子空间的交集经过密码函数时,交集属性被保持。而交集能够降低子空间的维数,故精确地刻画一个子空间是哪些子空间的交集,并以交集的形式进行传播,能有效降低子空间经过密码函数时增长的维数,从而寻找到更长的子空间迹。先定义两个新的子空间。

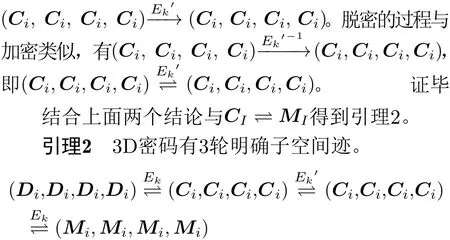
结合引理2,得到3D密码的一条6轮子空间迹不可能差分

截断不可能差分区分器从终点差分矩阵脱密到中间差分矩阵,再与起始差分加密得到的中间状态产生矛盾。为延长区分器,一般终点差分矩阵只有一个变量,例如3D密码的6轮截断不可能差分区分器[7],其区分优势为 28/2512≈2−504,与3D密码的6轮中间相遇区分器[8]区分优势相同。
而子空间迹不可能差分区分器在中间矛盾处,利用的是两个子空间交集为{0}的性质,且后几轮为明确子空间迹,维数保持不变,故终点子空间的差分变量更多。上面给出的3D密码的6轮子空间迹不可能差分区分器的区分优势为24×4×8/2512≈2−384,这是目前选择明文条件下区分优势最大的6轮3D密码区分器。
注意到,上面的子空间迹不可能差分区分器与密码规模、S盒和密钥的具体信息无关,即对带一个秘密S盒的3D密码同样有效。
3.2 3D密码的7轮子空间迹不可能差分区分器

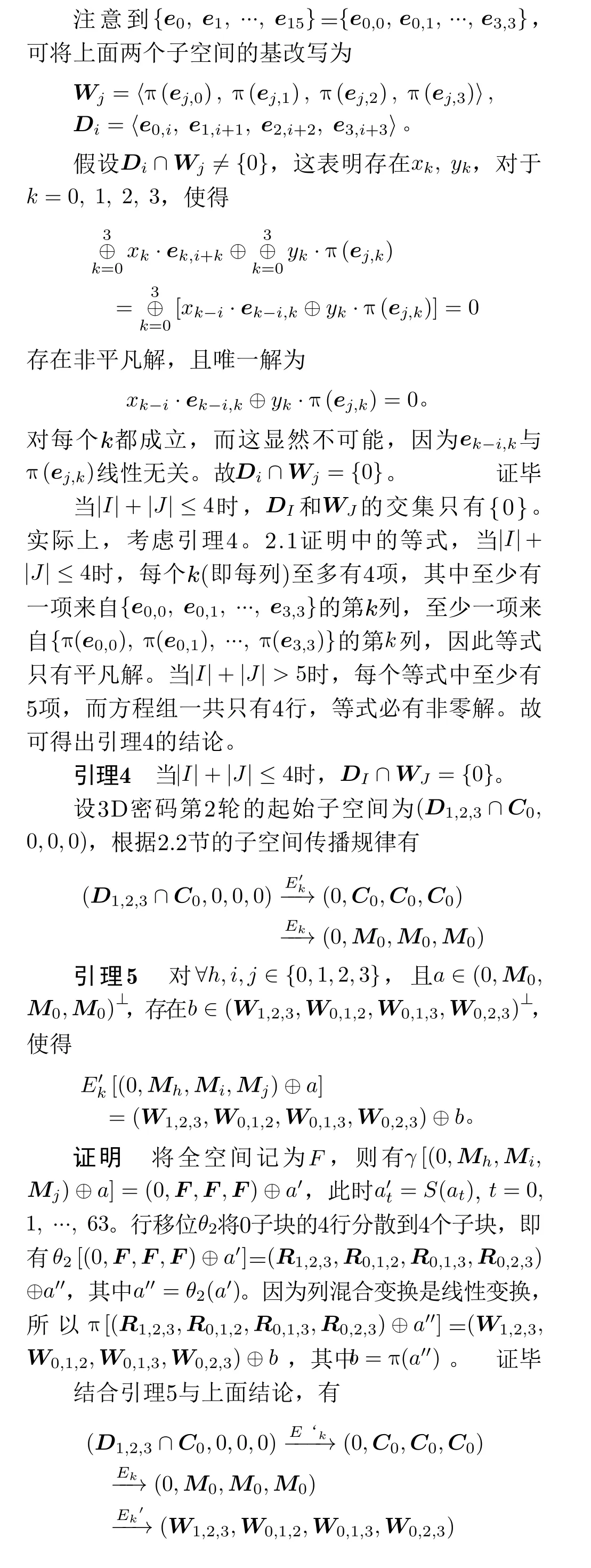
根据2.2节给出的3D密码子空间传播规律及引理5得到一条3D密码的子空间迹

为计算区分器的数据复杂度,首先介绍“生日悖论”,寻找所需输入明文的最小数目,以保证在随机情形中以高概率产生碰撞。
给定d值和n个变量,其中至少两个变量具有相同值的概率可以计算为

下面计算该区分器所需数据量及时间复杂度。
实验数据表明,256次碰撞中有63.8%的概率得到正确密钥对应的明文对。当函数为3D密码时,修改该明文对第 0 Byte、第5 Byte以外的值并加密,不会得到碰撞。512次碰撞对应概率为87.8%。
以256次碰撞为区分界限,使用 2193.1个选择明文,将以95%的概率得到256次碰撞,有63.8%的概率将7轮3D密码与随机函数区分开。故该3D密码的7轮子空间迹不可能差分区分器的数据复杂度为2193.1个 选择明文,成功率为9 5%×63.8%=60.6%。

最后给出3D密码的7轮子空间迹不可能差分区分器的具体算法:
离线阶段。建立表格T,存储S(x)⊕02x·S(y)⊕S(z)⊕02x·S(w)=0全部解。
步骤1 随机选择明密对,检测经逆列混合变换后的密文对差分是否属于子空间(IDi, IDi, IDi, IDi),其中i=0,1,2,3。 若无碰撞且已经使用2193.1个明密对,输出1,否则返回步骤1;若产生碰撞,进入步骤2;
步骤2 排除明文对与表格T中的解异或后的密钥值。若全部密钥被排除,输出0;否则,返回步骤1。
4 3D密码的结构区分器
第3节研究了3D密码子空间交集性质,给出了3D密码的7轮子空间迹不可能差分区分器,下面给出兼容、信息集、等价等概念的定义及相关定理,利用3 D 密码子空间与S 层的可兼容性,得到“n倍”性质并给出3D密码的7轮区分器。现有密码的结构区分器长度均不超过5轮,这是目前轮数最长的结构区分器。
4.1 兼容、信息集与等价关系
令d为S 盒操作在二元域F2上的扩张系数,Q=F2d,对于3D密码,d=8。设SPN密码作用于N个字,每个字的规模等于S盒的规模,则状态矩阵和圈密钥可表示为 QN上的向量,SPN密码的圈函数为R=K ◦L ◦S。
S是字节代替层,对状态矩阵中的比特块做非线性变换,{f0, f1,..., fN−1}为 QN一组基。
L是 QN上的一个F2- 线性双射。Q→Q。
K是轮密钥加操作,将内部状态与轮密钥异或。
定义5(兼容)[14]设V是 QN的子空间,如果V存在一组基在{f0, f1,..., fN−1}上表示为块对角矩阵时,则V与S兼容,并且称这类基为V的兼容基。
根据兼容的定义,文献[14]给出了信息集、等价关系的定义,并证明当存在与S层兼容的子空间时,密码算法有“n倍”性质,可以构造结构区分器,进一步给出结构区分器的构造条件。





根据子空间 (Mi, Mj, Ms, Mt)与S层的可兼容性,结合定理1,容易得到引理6。证明思路是交换碰撞对的某几列,得到等价消息对,结合定理1,等价消息对加密一轮差分相等,即仍然碰撞。

命题1说明当子空间V与S层兼容时,穷举V一个陪集中全部明文对并加密,差分属于同一子空间的密文对个数总是 2h−1的倍数,这种规律被称为密码算法的“n倍性质”。
4.2 3D密码的7轮结构区分器

以碰撞数模 215的数值作为区分依据,定理2说明穷举 (Di, Di, Di, Di)+a全部明文对,7轮3D密码得到的碰撞数模 215为0,而随机函数的碰撞数模 215为0的概率为2−15。区分成功的概率为1−2−15,大于99.99%,且利用的性质与密钥无关。需要3·2128≈2129.6次查表操作,存储复杂度为2128Byte。
5 结束语
本文对3D密码进行子空间迹分析,研究子空间传播规律,首先利用找到的3轮明确子空间迹,结合子空间的交集性质,构造了7轮3D密码的子空间迹不可能差分区分器。然后利用与S层兼容的子空间,给出了3D密码的7轮结构区分器,为基于子空间迹的攻击提供了基础。本文寻找子空间迹不可能差分区分器与结构区分器的方法,适用于任何SPN密码。
在利用子空间迹分析3D密码的过程中,发现其在寻找区分器上拥有优势。首先,截断不可能差分相比与子空间迹不可能差分,前者利用的中间相遇思想是从维数较小的终点差分矩阵脱密,在中间产生矛盾,因此区分优势较小,而后者利用的矛盾是两个子空间交集为{0},脱密过程是一条明确子空间迹,维数保持不变,区分优势往往更大。结构区分器的原理是当输入子空间与S层兼容时,等价消息对经过一轮加密函数,差分为常数,这是SPN结构密码的新性质,但对明确子空间迹依赖很强,例如AES只有5轮结构区分器,而3D密码存在3轮明确子空间迹,故可以构造7轮结构区分器。
因此能否得到子空间迹区分器与明确子空间迹的关系,给出基于子空间迹攻击的轮数的下界是有待解决的问题。
