可穿戴式上肢康复机器人运动学计算和仿真
2023-02-28郭建廖泰明郑兴强
郭建,廖泰明,郑兴强
(广州城市理工学院机械工程学院,广东广州510800)
0 前言
近年来,我国人口老龄化趋势明显,随着平均预期寿命的提高,将进一步加速人口老龄化[1]。脑卒中是我国老年人的高发疾病,会造成患者肢体运动功能障碍,合理的康复训练可以帮助患者恢复肢体运动功能。脑卒中具有高发病率、高致残率、高死亡率、高复发率、高经济负担5大特点[2]。上肢功能的恢复对脑卒中患者的治疗有极其重要的作用[3]。积极帮助患者做康复训练,有利于提高他们的活动能力。但传统基于人工辅助的康复治疗手段的成本较高,效率较低,难以满足脑卒中患者的康复需求[4-5]。人们的视线开始向康复机器人转移,因此康复机器人成为康复领域的新焦点。
文中主要研究可穿戴式上肢康复机器人,穿戴式上肢康复机器人体积小、质量轻,能够满足患者居家康复训练的需求,是一种结合智能与机械动力的人机结合可穿戴设备,它通过对人上肢的手腕、前臂、上臂等各部位关节进行支撑和牵引,从而引导患者进行康复训练[6]。
美国威斯康星大学ISLAM等[7]设计开发了一款名为u-Rob的上肢康复外骨骼,可以对患者肩部和手臂进行针对性的康复训练,但机构复杂,成本较高。伊朗阿扎德大学ESLAMI等[8]设计一款可调自动平衡被动上肢康复机器人,该上肢康复机器人设计思路新颖,但使用时容易对患者造成二次损伤。北京交通大学郭盛等人[9]研制了一款新型可穿戴上肢康复机构,该机构结合串联及并联机构优势,设计新颖,但结构复杂。济南大学鲁守银等[10]发明了一款主从式上肢外骨骼康复机器人,采用上肢运动规律的主从式结构进行设计,提高了康复效率,但体积大、舒适度较低。燕山大学严浩等人[11-12]研发的一种具有广义肩关节的康复机器人,减少了肩部安装位置,但机器末端质量大、对电机要求高。
为解决上述问题,满足患者日常需求,结合人体上肢结构[13-15],本文作者设计了一个五自由度上肢康复机器人,并对其运动学、可达空间位置进行分析,通过轨迹规划仿真其康复训练的可行性。计算和仿真数据为康复机器人运动控制提供数据支持。
1 上肢康复机器人机构设计
选取医学上肢康复最常用的五自由度结构进行设计,上肢康复机器人的整体结构模型如图1所示,整体质量约5.5 kg。

图1 整机结构模型Fig.1 structure model of whole Machine
上肢康复机器人整体结构由机架、肩关节、肩袖、大臂、肘关节、小臂和腕关节七部分组成,涉及5个自由度;采用铝合金作为主要材料。首先肩关节与机架连接于转动副1,实现患者大臂的内旋/外旋,转动范围为0°~90°;肩关节与肩袖连接于另一个转动副2,实现患者大臂的内收/外展,转动范围为-180°~-60°。肩袖另一端与大臂一端通过转动副3连接,实现大臂上摆/下摆,转动范围为-45°~90°。大臂另一端通过肘关节与小臂连接于转动副4,实现患者小臂内收/外展,范围为0°~135°。小臂末端通过转动副5与腕关节连接,实现患者腕部的内收/外展,范围为0°~90°。同时在大臂和小臂上均有调整手臂尺寸的结构,以适应不同患者的手臂尺寸。最终通过控制以上各个转动副的旋转角度,从而控制上肢康复机器人的运动,完成不同的康复动作。
2 运动学建模和计算
2.1 正运动学计算
上肢康复机器人的结构满足串联机器人计算公式,将基坐标系{0}原点建立在转动副1上,同时OZ轴正向是其轴线向指向手臂的方向;OX轴方向与水平面平行;OY轴方向由右手法则确定。利用改进的D-H方法建立各关节的坐标系如图2所示。

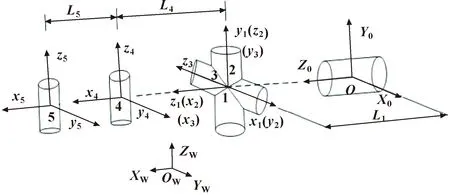
图2 康复机器人的D-H坐标系Fig.2 The D-H coordinate system of the rehabilitation robot
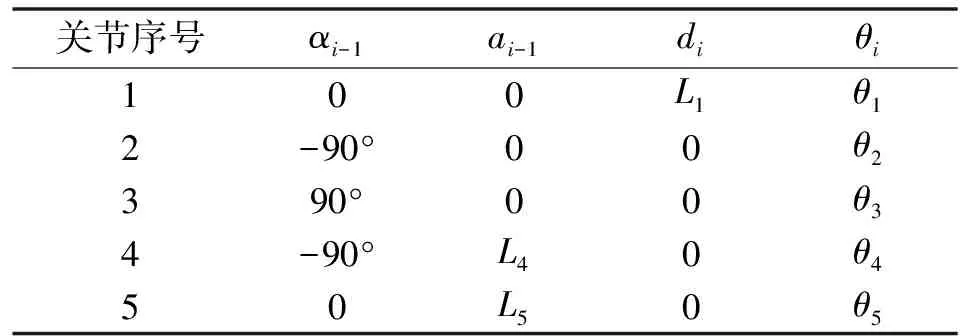
表1 上肢康复机器人的D-H参数
根据D-H参数,代入式(1)可以得到式(2):
(1)
(2)
(3)
其中公式(3)中:
(4)
定义:Si=sinθi,Ci=cosθi,Sijk=sinθisinθk-cosθicosθjcosθk,Cijk=cosθisinθk-sinθicosθjsinθk。

2.2 正运动学验证
为了验证正运动学的正确性,通过MATLAB建立上肢康复机器人的数学模型,再分别代入3组不同的数据:
到该数学模型和式(3)中,对比理论计算结果和仿真结果,可以得到表2—表4。

表2 正运动学验证1

表3 正运动学验证2

表4 正运动学验证3
将表2—表4中理论公式的计算结果和MATLAB仿真结果进行对比发现:理论值和仿真值最大误差为0.03%,而产生误差的原因来自于无限不循环小数,说明理论值和仿真值一致。
2.3 逆运动学计算

(6)
由式(5)—式(6)得到:
-C2S3=axC1+ayS1
(7)
C3=ayC1-axS1
(8)
C4S3=nyC1-nxS1
(9)
S2S3=az
(10)
-L4C3S2=pz-L1-L5nz
(11)
由式(10)—式(11)得:
(12)
(13)
式(7)乘以ax减去式(8)乘以ay得到:
(14)
(15)
由式(9)得:
(16)
2.4 逆运动学验证


表5 逆解验证1

表6 逆解验证2

表7 逆解验证3
从上述3个表的结果可以得出:MATLAB的理论值和公式计算的值基本一致,其最大绝对值误差在0.03%以内。仿真计算结果存在正负值,反映出逆运动学存在多组解的可能。在选择最优解的时候,会根据上述各个关节限定的角度范围进行选择。
3 上肢康复机器人可达空间位置分析
在规划机器人运动时,需要计算机器人的可达空间位置。为了得出上肢康复机器人的可达空间范围,采用蒙特卡洛随机采样算法,对各个关节角在关节范围内随机选取100 000个点进行计算,通过正运动学求解,即可得到相应的末端位置。运用MATLAB绘制各个末端位置点终得出上肢康复机器人的可达空间,结果如图3—图6所示。
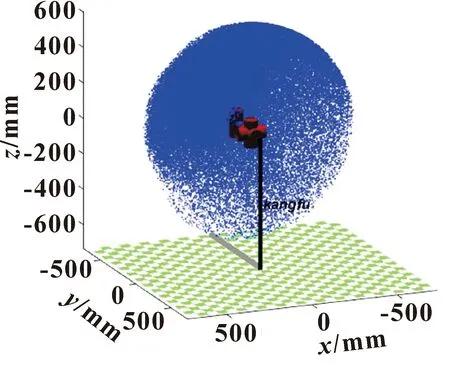
图3 三维空间

图4 X-Y平面投影
图5 X-Z平面投影Fig.5 X-Z planar projection

图6 Y-Z平面投影Fig.6 Y-Z planar projection
在上述计算区域内规划上肢康复机器人的末端轨迹,能有效避免机器干涉,提高了上肢康复机器人的稳定性,满足患者康复的日常需求。
4 上肢康复机器人的轨迹规划和仿真
轨迹规划是机器人运动控制的前提,机器人的轨迹规划是根据机器人的任务来确定各自由度运动路径的过程,其中包括关节空间轨迹规划和笛卡尔空间轨迹规划。为了简化计算量,文中将采用关节空间轨迹规划来仿真上肢康复机器人,以“在桌上取杯子到胸前”这任务为例。因为上肢康复机器人对于运动轨迹有严格的要求,因此需要用五次多项式进行插值,能有效地避免运行死点和振动的产生。
将起始点t0时刻的关节角θ0=[0° -135° 30° 0° 0°]和终止点tf时刻的关节角θf=[0° -173° 0° 115° 0°]代入五次多项式,如式(17)所示:
θ(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5
(17)
同时为了保证始终的关节速度函数和始终的关节角加速度函数的连续,即始终关节速度和始终关节角加速度都为零,其约束条件表示为
(18)
分别将t=0和t=tf代入式(17)得:
(19)
根据式(17)—式(19)解出待定参数:
(20)
通过MATLAB编程进行任务仿真,要求在3.5 s内完成轨迹规划,步长为0.05 s。轨迹规划仿真结果和末端执行器的轨迹视图以及各关节角度、角速度、角加速度曲线,分别如图7—图9所示。

图7 轨迹规划仿真结果
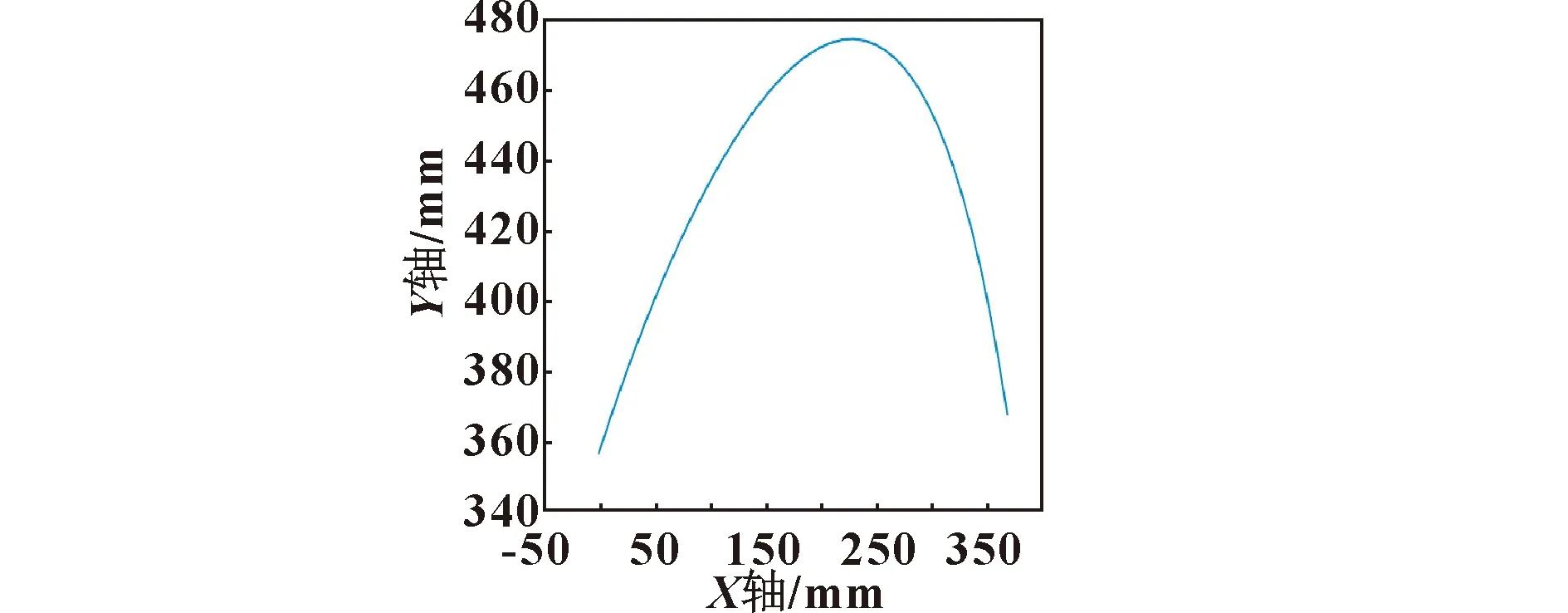
图8 末端执行器的轨迹视图(X-Y视图)

图9 各关节角度(a),角速度(b),角加速度(c)曲线
从末端执行器的轨迹视图和各关节角度、角速度、角加速度曲线可以看出:上肢康复机器人完成设定的“取杯子”任务,其中关节2与关节5曲线重合。在通过中间插补点时没有出现曲线突变的情况,曲线圆滑连续且过渡自然,减少了上肢康复机器人运动时的振动和冲击,保证了上肢康复机器人稳定运行,有利于提供机器的使用寿命,为患者提供良好的康复训练。
5 结论
文中对设计的可穿戴式上肢康复机器人模型,结合MATLAB完成数学建模和运动学分析,得出对应的运动学公式,对结果进行验证和仿真。同时算出模型的可达空间范围,最后在关节角度范围内基于五次多项式插值算法完成了“取杯子”任务的轨迹规划。
(1)结合MATLAB对设计的可穿戴式上肢康复机器人进行建模和分析,推导出运动学公式,建立数学模型,验证了运动学公式的正确性,为可达空间仿真作铺垫。
(2)利用运动学公式,分析推导出机器人转动副1、2、3、4的旋转角度的表达式,验证结果符合实际,为控制关节角度运动提供重要的依据。
(3)基于蒙特卡洛随机采样算法,对各个关节角在关节角度范围内随机选取100 000个点进行计算,通过正运动学求解模型的可达空间范围。可达空间满足患者康复的日常需求。
(4)基于五次多项式插值对上肢康复机器人进行“取杯子”任务的关节空间轨迹规划,结合MATLAB编程仿真,得出圆滑连续且过渡自然的函数曲线,有效地避免了运行死点和振动冲击的产生,保证了上肢康复机器人稳定运行,为患者提供良好的康复训练。可为上肢康复机器人运动控制提供数据支持。
